数控技术课大作业
专业:
学号:
学生:
指导教师:
完成日期:
题目一要完成的程序编写任务
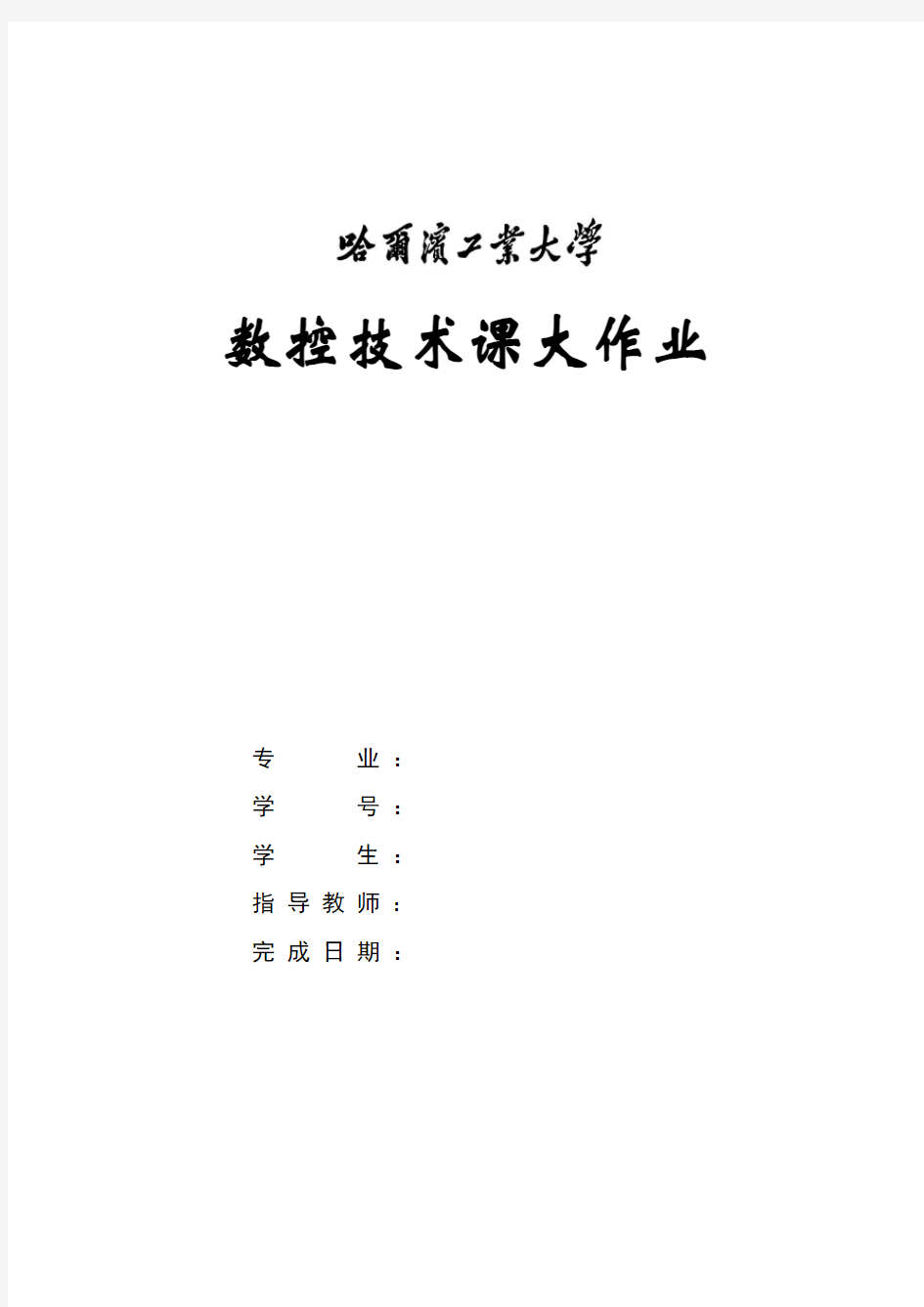
坐标原点:¢40圆的圆心处为工件编程X、Y轴原点坐标,Z轴原点坐标在精铣后的工件上表面。
刀具补偿:刀具补偿号自定。
作业中画出加工工件和坐标系。
(1)编写精铣¢60外圆工序(仅工序5中¢60外圆,台阶不管)加工程序;
(2)编写工序6~10加工程序;
(3)编写工序12精铣外轮廓加工程序。
加工零件图
程序
(1)编写精铣¢60外圆工序(仅工序5中¢60外圆,台阶不管)加工程序。
N10 G92 X0 Y0 Z0;
N20 G90 G00 Z50 T02 M06;
N25 G43 H01;
N30 G00 Y-60;
N40 Z-18 M03;
N45 G00 G41 D01 X0 Y-30;
N50 G02 I0 J0 F100 S600;
N60 G00 G40 G49 X0 Y-60 M05;
N70 Z50;
(2)编写工序6~10加工程序。
N10 G92 X0 Y0 Z0;
N20 G90 G00 Z50 T03M06;
N30 G43 Z10 H02;
N40 S400 M03;
N50 G98G81 X0 Y0 Z-43 R3 F50;
N60 M05;
N70 G00 G49 Z50 T04 M06;
N80 G43 Z10 H03;
N90 S400 M03;
N100 G98 G85 X0 Y0 Z-43 R3 F100;
N120 M05;
N130 S900 M03;
N140 G98 G85 X0 Y0 Z-43 R3 F100;
N150 M05;
N160 G00 G49 Z50 T05 M06;
N170 G43 Z10 H04;
N180 S500 M03;
N190 G98 G81 X0 Y-60 Z-43 R-15 F50;
N200 G98 Y60;
N210 G00 X0 Y0 M05;
N220 G49 Z50 T06 M06;
N230 G43 Z10 H05;
N240 S350 M03;
N250 G98 G73 X0 Y-60 Z-30 R-15 F200;
N260 G98 Y60;
N270 G00 XO Y0 M05;
N280 G49 G80 Z50;
(3)写工序12精铣外轮廓加工程序。
N10 G92 X0 Y0 Z0;
N20 G90 G00 Z50 T07 M06;
N30 G43 X10 Y-100 Z-40 H05;
N40 S1200 M03;
N50 G00 G41 D02 X0 Y-80;
N60 G02 X-17.7 Y-69.3 R20;
N70 G01 X-46.6 Y-13.87;
N80 G02 Y13.87 R30;
N90 G01 X-17.7 Y69.3; N110 G02 X17.7 R20;
N120 G01 X46.6 Y13.87; N130 G02 Y-13.87 R30; N140 G01 X17.7 Y-69.3; N150 G02 X0 Y-80 R20; N160 G00 G40 X10 Y-100; N170 Z50;
题目二数控系统的国内外发展及应用现状
目录
第1章序言
第2章数控系统的发展过程和趋势
2.1数控系统的发展过程
2.2数控系统的发展趋势
第3章国外和国内数控系统功能介绍与应用分析
3.1 国外数控系统功能介绍与应用分析
3.1.1 FANUC 数控系统6
3.1.2 西门子SINUMERIK 840D
3.2 国内数控系统功能介绍与应用分析
3.2.1 华中数控HNC-210AT数控装置
3.2.2 广州数控GSK27全数字总线式高档数控系统
第4章国内外数控系统比较及差距分析
4.1 国内外数控系统比较
4.1.1 FANUC公司数控系统的产品特点
4.1.2 西门子公司数控系统(SIEMENS)的产品特点
4.1.3 华中数控系统的产品特点
4.2 我国数控系统与国外数控系统的差距
参考文献
第一章序言
数控即数字控制(Numerical Control,NC)。数控技术是指用数字信号形成的控制程序对一台或多台机械设备进行控制的一门技术。
数控机床,简单的说,就是采用了数控技术的机床。即将机床的各种动作、工件的形状、尺寸以及机床的其他功能用一些数字代码表示,把这些数字代码通过信息载体输入给数控系统,数控系统经过译码、运算以及处理,发出相应的动作指令,自动地控制机床的刀具与工件的相对运动,从而加工出所需要的工件。
因此,数控机床就是一种具有数控系统的自动化机床。它是典型的机电一体化产品,是现代制造业的关键设备。
第二章数控系统的发展过程和趋势
2.1数控系统的发展过程
为了满足多品种、小批量的自动化生产,并适应随着科学技术和社会生产的不断发展所要求越来越高的机械产品的质量和生产率,迫切需要一种灵活的、通用的、能够适应产品频繁变化的柔性自动化机床。数控机床就是在这样的背景下产生与发展起来的。它极其有效地提高了产品质量,大大提高了生产率,并为单件、小批量生产的精密复杂零件提供了自动化加工手段。
随着电子技术的发展,1946 年世界上第一台电子计算机问世,由此掀开了信息自动化的新篇章。1948 年美国北密支安的一个小型飞机工业承包商帕森斯公司(Parsons Co.)在制造飞机的框架及直升飞机的转动机翼时,提出了采用电子计算机对加工轨迹进行控制和数据处理的设想,后来得到美国空军的支持,并与美国麻省理工学院(MIT)合作,于1952 年研制出第一台三坐标数控铣床,用于加工直升飞机叶片轮廓检查用样板。这是一台采用专用计算机进行运算与控制的直线插补轮廓控制数控铣床,专用计算机采用电子管器件,逻辑运算与控制采用硬件连接的电路。
1955 年,该类机床进入实用化阶段,在复杂曲面的加工中发挥了重要作用。这时数控机床的控制系统(专用电子计算机)采用了电子管,其体积庞大,功耗高。此种机床仅在一些军事部门中用于加工普通机床难以加工的形状复杂的零件。这是第一代数控系统。
1959 年晶体管出现,电子计算机应用了晶体管器件和印制电路板,从而使机床数控系统跨入了第二代。
1965 年,数控装置开始采用小规模集成电路,使数控装置的体积减小、功耗降低及可靠性提高,但它仍然是硬件逻辑数控系统。数控系统发展到第三代。
以上三代,都属于硬件逻辑数控系统,称为NC 系统。由于点位控制的数控系统比轮
廓控制的数控系统要简单得多,在该阶段,点位控制的数控机床得到大发展。有资料统计,到1966 年,世界上实际使用的6000 台数控机床中,85%是点位控制的数控机床。
1970 年,美国芝加哥国际机床展览会首次展出用小型计算机控制的数控机床,这是世界上第一台计算机数字控制(CNC)的数控机床。数控系统进入第四代。
20 世纪70 年代初,随着微处理机的出现,美、日、德等国都迅速推出了以微处理机为核心的数控系统,这样组成的数控系统,称为第五代数控系统,即MNC 系统。在近20 多年内,生产中实际使用的数控系统大多为第五代数控系统,其性能和可靠性随着技术的发展得到了根本性的提高。
从20 世纪90 年代开始,微电子技术和计算机技术的发展突飞猛进,个人计算机(PC) 的发展尤为突出,无论是其软、硬件还是外围器件,都得到了迅速的发展,计算机采用的芯片集成化程度越来越高,功能越来越强,而成本却越来越低,原来在大、中型机上才能实现的功能现在微型机上就可以实现。美国首先推出了基于个人计算机的数控系统,即PCNC系统,它被划入所谓的第六代数控系统。
目前,世界主要工业发达国家的数控机床已进入批量生产阶段,如美国、日本、德国、法国等,其中日本发展最快。1977 年时,日本年产数控机床5400 多台,到1985 年,日本产数控机床约为50000 台,数控化率约为70%,居世界第一位。
我国1958 年试制成功第一台电子管数控机床,并从1965年开始研制晶体管数控系统,到20世纪70年代初曾研究出数控劈锥铣床、非圆插齿机、数控立铣床、数控车床、数控镗
床、数控磨床和加工中心等。这一时期国产数控系统的稳定性、可靠性问题尚未得到很好地解决,因而也限制了国产数控机床的发展。而数控线切割机床由于其结构简单、价格低廉、使用方便,得到了较快的发展,据资料统计,1973~1979 年期间,我国共生产数控机床4108 台,而其中数控线切割机床就占了86%左右。
2.2数控系统的发展趋势
从1952年美国麻省理工学院研制出第一台试验性数控系统,到现在已走过了五十多年的历程。近10年来,随着计算机技术的飞速发展,各种不同层次的开放式数控系统应运而生,发展很快。总体上讲,目前世界数控技术及其装备发展趋势主要体现在以下几个方面:
①向高速、高效、高精度、高可靠性方向发展。
②向模块化、智能化、柔性化、网络化和集成化方向发展。
③向PC—based化和开放性方向发展。
④出现新一代数控加工工艺与装备,机械加工向虚拟制造的方向发展。
⑤信息技术(IT)与机床的结合,机电一体化先进机床将得到发展。
⑥纳米技术将形成新发展潮流,并将有新的突破。
⑦节能环保机床将加速发展,占领广大市场。
第三章国外和国内数控系统功能介绍与应用分
析
3.1 国外数控系统功能介绍与应用分析
3.1.1 FANUC 数控系统6
FANUC 数控系统6,是具备一般功能和部分高级功能的中级型CNC 系统,分成6M与6T 两个品种,它们的硬件部分是通用的,只变更其部分软件来获得不同功能,6T 适用于车床,6M 适用于铣床和加工中心。
FANUC数控系统6 的特点主要包括:
(1) 可靠性高。由于使用了大容量磁泡存储器、大规模专用集成电路和高速微处理器,而且在制造过程中采用严格筛选,使用自动检测器进行自动检测以及环境试验等措施,大大提高了电路的可靠性。为了提高动作的可靠性,该系统还备有数据奇偶校验、程序对比校验和时序校验等校验功能。
(2) 适用于高精度、高效率加工,最小脉冲当量为1 μm或0.001in,具有提高加工精度的间隙补偿和丝杠螺距误差补偿功能;还有自动监视和自动补偿伺服系统漂移的功能;有自动监视误差寄存器的静态误差与动态误差的功能;备有高效率的随机选择自动换刀机构和纯电气式的主轴快速定向控制系统;有控制主轴电动机转速、确保切削速度不变的恒速切削控制;还有为缩短加工时间的许多固定循环。
(3) 容易编程。备有由用户自己制作特有变量型子程序的用户宏功能;有不必预先计算就能够直接指定刀尖设定点的刀尖半径补偿功能;能用图样标记半径值直接指令的圆弧补偿;还有便于某些交换工作台机械编程的返回第2 参考点功能,只需指定精加工尺寸就可以自动进行粗切削、精切削的复合型固定循环。
(4) 容易维护保养,现场调试方便。能够使用微处理器进行CNC系统内部监视,能判断160 种(6M)或130 种(6T)停车故障;确认CNC 系统的所有输入/输出开关信号的显示值或输出值,能发现数控柜和机床强电柜的故障;间隙补偿量、螺距误差补偿量、伺服系统时间常数等参数可简单地用MDI输入设定。
(5) 操作性好,使用安全。大容量磁泡存储器,具有最大320m 控制带的存储、编辑功能,用程序号检索可以调出所需程序进行加工,具有相当于DNC 的功能;使用CRT 显示器能确认程序内容、偏移量的设定与变更和各种动作的状态,加上手动操作,大大提高了操作性能;使用带小数点的数字表示尺寸或位置可以防止眼误;具备便于工程管理、刀具寿命管理的累计使用时间显示功能等;为了保护所存入的程序,使用带“锁”的键输入;为防止刀具与工件冲撞,使用了存储式限位开关,设置刀具禁入区域。
3.1.2 西门子SINUMERIK 840D
SINUMERIK 840D是西门子公司20世纪90年代推出的高性能数控系统。它保持西门子前两代系统SINuMERIK 880和840C的三CPU结构:人机通信CPU(MMC-CPU)、数字控制
CPU(NC-CPU)和可编程逻辑控制器CPU(PLC-CPU)。三部分在功能上既相互分工,又互为支持。在物理结构上,NC-CPU和PLC-C P U合为一体,合成在NCU(Numerical Control Unit)中,但在逻辑功能上相互独立。
SINUMERIK 840D的特点主要包括:
(1)数字化驱动。在SINUMERIK 840D中,数控和驱动的接口信号是数字量,通过驱动总线接口,挂接各轴驱动模块。
(2)轴控规模大。最多可以配31个轴,其中可配10个主轴。
(3)可以实现五轴联动。SINUMERIK 840D可以实现X、Y、Z、A、B五轴的联动加工,任何三维空间曲面都能加工。
(4)操作系统视窗化.SINUMERIK 840D采用Windows95作为操作平台,使操作简单、灵活,易掌握。
(5)软件内容丰富功能强大。SINUMERIK 840D可以实现加工(Machine)、参数设置(Parameter)、服务(Services)、诊断(Diagnosis)及安装启动(Start—up)等几大软件功能。
(6)具有远程诊断功能。如现场用PC适配器、MODEM卡,通过电话线实现SINUMERIK 840D 与异域PC机通信,完成修改PLC程序和监控机床状态等远程诊断功能。
(7)保护功能健全。SINUMERIK 840D系统软件分为西门子服务级、机床制造厂家级、最终用户级等7个软件保护等级,使系统更加安全可靠。
(8)硬件高度集成化。SINUMERIK 840D数控系统采用了大量超大规模集成电路,提高了硬件系统的可靠性。
(9)模块化设计。SINUMERIK 840D的软硬件系统根据功能和作用划分为不同的功能模块,使系统连接更加简单。
(10)内装大容量的PLC系统。SINUMERIK 840D数控系统内装PLC最大可以配2048输入和2048输出,而且采用了Profibus现场总线和MPI多点接口通信协议,大大减少了现场布线。
(11)PC化。SINUMERIK 840D数控系统是一个基于PC的数控系统。
3.2 国内数控系统功能介绍与应用分析
3.2.1 华中数控HNC-210AT数控装置
该系列产品是华中数控系统中的高端产品,采用一体化模具设计,工程操作面板采用独立安装的形式。集成进给轴接口、主轴接口、手持单元接口、内嵌式PLC接口于一体,支持远程I/O扩展功能,采用电子盘程序存储方式以及CF卡、USB盘、DNC、以太网等程序扩展及数据交换功能,8.4//TFT彩色液晶显示屏。最大控制轴数:3轴,主要应用于数控车床和车削加工中心。
HNC-210AT数控装置主要特点包括:
(1)可选配各种类型的脉冲接口式交流伺服驱动单元(闭环、半闭环)或步进驱动单元(开环)。
(2)主轴单元可选配伺服主轴单元、变频主轴单元,编码器接口,带脉冲量接口。
(3)汉字菜单、全中文界面、中文参数系统,故障监控、故障诊断与报警,历史故障记忆,能显示机床坐标系、工件坐标系、相对坐标系、实时跟踪误差、实时剩余进给量、指
令位置、实际位置实时显示等,操作简便,易于操作者监控实时坐标动态。
(4)加工图形显示和仿真(三维彩色图形实时动态显示刀具轨迹和零件形状)。
(5)具有加工程序编辑功能,可全屏幕编辑、支持后台编辑功能(选件)。还提供高级编辑功能,如块定义、块操作(删除、拷贝、粘贴等)、行删除、查找、替换以及光标快速定位文件的头尾等功能.
(6)加工断点保存与恢复功能,程序跳段功能,选择停功能,可从指定的任意行运行加工。
(7)支持反向间隙补偿、单向螺距误差补偿和双向螺距误差补偿功能,补偿点数128点。
(8)支持跟踪误差允差设定与报警、定位允差设定与报警功能,轮廓误差示波器。
(9)小线段连续加工功能,特别适合于CAD/CAM设计的模具和零件加工。
(10)支持手持单元(包含电子手轮、轴选择波段开关、倍率选择波段开关、使能开关、急停按钮、弹簧电缆等)。
(11)具有USB接口可热插拔、硬盘接口,可装载和存储巨量加工程序。
3.2.2 广州数控GSK27全数字总线式高档数控系统
GSK27系统是广州数控承担国家高档数控装置开发重大专项项目的结晶,是广数依托自己的成熟的数控研发技术、工业现场总线技术、制造技术等的最新成果。系统采用多处理器实现nm级控制;人性化人机交互界面,菜单可配置,根据人体工程学设计,更符合操作人员的加工习惯;采用开放式软件平台,可以轻松与第三方软件连接;高性能硬件支持最大8通道,64轴控制。
GSK27全数字总线式高档数控系统主要特点包括:
(1)开放式数控系统平台,对第三方软件有很好的支持;
(2)多通道、多轴联动控制;
(3)采用高性能处理器实现纳米级控制;
(4)支持各种常用编程软件的刀具路径程序;
(5)电子手轮可手动控制各进给轴;
(6)具有三维刀具补偿;
(7)具有旋转刀具中心点编程;
(8)具有远程诊断技术;具有三维仿真技术。
第四章国内外数控系统比较及差距分析
4.1 国内外数控系统比较
4.1.1 FANUC公司数控系统的产品特点:
(1)结构上长期采用大板结构,但在新的产品中已采用模块化结构。
(2)采用专用LSI,以提高集成度、可靠性,减小体积和降低成本。
(3)产品应用范围广。每一CNC装置上可配多种上控制软件,适用于多种机床。
(4)不断采用新工艺、新技术。如表面安装技术SMT、多层印制电路板、光导纤维电
缆等。
(5)CNC装置体积减小,采用面板装配式、内装式PMC(可编程机床控制器)。
(6)在插补、加减速成、补偿、自动编程、图形显示、通信、控制和诊断方面不断增加新的功能:
插补功能:除直线、圆弧、螺旋线插补外,还有假想轴插补、极其坐标插补、圆锥面插补、指数函数插补、样条插补等。
切削进给的自动加减速功能:除插补后直线加减速,还插补前加减速。
补偿功能:除螺距误差补偿、丝杠反向间隙补偿之外,还有坡度补偿线性度补偿以及各新的刀具补偿功能。
故障诊断功能:采用人工智能,系统具有推理软件,以知识库为根据查找故障原因。
(7)CNC装置面向用户开放的功能。以用户特订宏程序、MMC等功能来实现。
(8)支持多种语言显示。如日、英、德、汉、意、法、荷、西班牙、瑞典、挪威、丹麦语等。
(9)备有多种外设。如FANUC PPR, FANUC FA Card,FANUC FLOPY CASSETE,FANUC PROGRAM FILE Mate等。
(10)已推出MAP(制造自动化协议)接口,使CNC通过该接口实现与上一级计算机通信。
(11)现已形成多种版本。
FANUC 系统早期有3系列系统及6系列系统,现有0系列、10/11/12系列、15、16、18、21系列等,而应用最广的是FANUC 0系列系统。
4.1.2 西门子公司数控系统(SIEMENS)的产品特点:
SIEMENS公司的数控装置采用模块化结构设计,经济性好,在一种标准硬件上,配置
多种软件,使它具有多种工艺类型,满足各种机床的需要,并成为系列产品。随着微电子技术的发展,越来越多地采用大规模集成电路(LSI),表面安装器件(SMC)及应用先进加工工艺,所以新的系统结构更为紧凑,性能更强,价格更低。采用SIMATICS系列可编程控制器或集成式可编程控制器,用SYEP编程语言,具有丰富的人机对话功能,具有多种语言的显示。
SIEMENS公司CNC装置主要有SINUMERIK3/8/810/820/850/880/805/802/840
系列。
4.1.3 华中数控系统的产品特点:
华中数控系统是基于通用PC的数控装置,是武汉华中数控股份有限公司在国家八五、九五科技攻关的重大科技成果。华中数控系统发展为三大系列:世纪星系列、小博士系列、华中I型系列。而华中I型系列为高档高性能数控装置,为满足市场要求,开发了世纪星系列、小博士系列高性能经济型数控装置。世纪星系列采用通用原装进口嵌入式工业PC机,彩色LCD液晶显示器,内置式PLC,可与多种伺服驱动单元配套使用;小博士系列为外配通用PC机的经济型数控装置。具有开放性好、结构紧凑、集成度高、可靠性好、性能价格比高、操作维护方便的特点。
4.2 我国数控系统与国外数控系统的差距
随着国际学术及产业界对开放式数控系统研究的日益推进,我国的相关研究也越来越受到重视。经过几十年的发展,我国机床行业也形成了具有一定生产规模和技术水平的产业体系,国产数控系统产业发展迅速,在质与量上都取得了飞跃。然而,由于我国原有数控系统的封闭性及数控软硬件研究开发的基础较差,技术积累较少,研发队伍的实力较弱,研发的投入力度不够,国产中高档数控系统在性能、功能和可靠性方面与国外相比仍有较大的差距,限制了数控系统的发展。为此需要政府、科研院所和制造商共同努力,推进我国中高档数控系统的发展。
参考文献
1.王永章,杜君文,程国全.数控技术.北京:高等教育出版社,2001.
2.徐伟,刘朝明.数控系统发展趋势的研究[期刊论文]–制造业自动化2009,31(9)
3.王虎军. 国内外数控系统发展现状研究[期刊论文] –科学大众科学教育 2011(11)
4.邹伟平,吴再兴.数控技术的现状及发展趋势[期刊论文] –林业机械与木工设备 2006,34(3)
5.数控市场:竞争激烈四大差距[期刊论文] –机械工程师 2006(11)
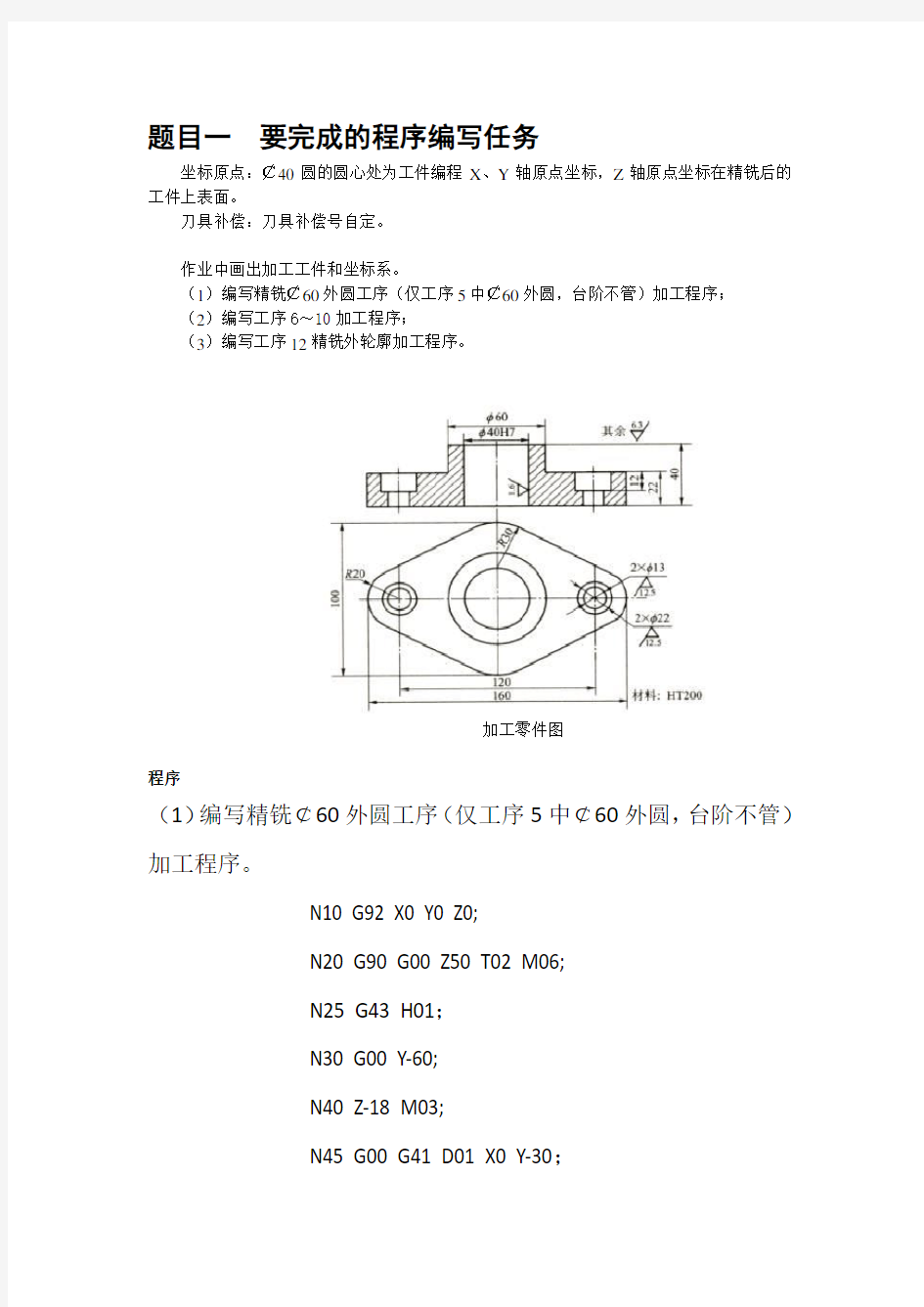
题目三 DDA 法椭圆插补
如图所示,椭圆的参数方程可表达为:x = acost ,y = bsint 。 式中:a ——— 椭圆长轴半径;
b ——— 椭圆短轴半径; t ———参数角。
设要在第一象限内逆圆加工一段椭圆曲线,起点为S P 、终点为e P 。当前点i P 的坐标为(i x ,i y ),经过参数角t ?后,下一点1+i P 的坐标为(1+i x ,1+i y )。对参数方程求微分:dx = -asintdt = -
b
a
ydt dy = -costdt = -
a
b
xdt 因而,从i P 到1+i P 两坐标的增量可近似写作:
?x = -b a ydt = -k b a
ydt
?y = a b xdt=k a
b
xdt
仿圆弧插补DDA ,设累加器为n 位,则k n 2
1
。得椭圆的插补公式为:
x=ydt b a k t
?-0
=-n 21t y b a
i m i ?∑=1
y=xdt a b k t
?0
=t x a b
i m i n ?∑=121
椭圆插补的步骤如下: (1) 运算开始,x 轴
y 轴被积函数分别存放其初值,即
b
a y ,
a
b x 。总步长
S E X X -,S E
Y Y -;
(2) x 轴累加器得出的溢出脉冲发送-x 方向,而y 轴累加器得到的溢出脉冲送
到+ y 方向;
(3) 某一轴发出一个进给脉冲后,必须将该轴被积函数的坐标值加以修正。
例如:当x 轴方向发出进给脉冲时,y 轴的被积函数中的x 坐标值减1
而后乘
a
b ,当y 轴方向发出了一个进给脉冲时,x 轴的被积函数的y 坐
标加1 而后乘
b
a
。
(4) 终点判别:每次累加后,用∑?x ,∑?y 与椭圆终点坐标曲线作比较。
当某个坐标轴到终点,该轴不会有脉冲发出,当两个坐标轴都达到终点时,则插补结束。 椭圆DDA 插补实例
设有一椭圆,长半轴a = 10 ,短半轴b = 6 ,自起点A (10 ,0),终点E (0, 6)逆圆加工,试用DDA 插补此段圆弧。
按照上述插补方法及步骤,设寄存器整数部分占4 位,小数部分占4 位,共8 位,满16 溢出。插补的轨迹如下图所示。
插补过程如表所示:
注:∑x J ,∑y J 为终点计数器。
09年春A 一、填空(10分) 1.液压传动是以为介质,以的形式来传递动力的。 2.液压系统的压力取决于,执行元件的运动速度取决于。 3.液压传动装置由、、 和四部分组成。 4.液压泵按结构可分为、和三种,液压阀按用途可分为、和三种。 5.双出杆活塞缸当缸筒固定缸杆其移动范围为 行程的倍。 6.液压调速阀是由阀和阀联而成。 7.常用的调速回路有、、和三种。 二、简要回答下列问题(20分) 1.解释沿程压力损失和局部压力损失,并写出其表达式。(4) 2.解释齿轮泵的困油现象。(4) 3.解释节流阀的最小稳定流量(4) 4.解释调速回路速度刚度的概念。(4) 5.简述溢流阀和减压阀有什么区别。(4) 三、绘制下列各图(20) 1.定量泵的压力—理论流量、实际流量、容积效率、等特性曲线。(4) 2.限压式变量叶片泵的压力流量特性曲线。(2) 3.节流阀和调速阀的流量压差特性曲线。(4) 4.溢流阀的流量压力特性曲线。(2) 5.变压节流调速机械特性曲线。(3) 6、画出下列液压元件职能符号,并注明相应油口。(5) (1)双向变量马达(2)二位二通机动换向阀(常闭)(3)液控顺序阀 四、系统分析(15) 图示的液压系统能实现快进——工进——快退——原位停止的循环动作。填写电磁铁动作表,并说出液压元件1、2、3、4、7、8的名称和用途。说明,(1)该系统是如何实现快进的;(2)该系统是如何实现速度换接的;(3)该系统是何种调速回路;(4)液压泵是如何卸荷的。 1YA 2YA 3YA 4YA
五、计算下列各题( 1.已知:油缸面积A 1=100cm 2 、A 2 泵的容积效率和机械效率ηv =ηm 壁孔,其流量系数C d =0.65ρ=900kg/m 3,力和油泵电机功率(8)。 2.油泵排量V p =50ml/r , 转速n p vP =0.94,泵工作压力p p =4.5MPa 率和机械效率 ηvm =ηmm =0.9 1Y 2YA 4YA
数控技术习题及答案 篇一:机床数控技术复习与考试,试题及答案大全 数据采样插补的特点是插补运算分两步进行。第一步进行粗插补,第二步进行精插补。 刀具补偿包括刀具长度补偿和刀具半径补偿。 伺服系统被看作一个独立部分,与数控系统和机床本体并列为数控机床的三大组成部分。 一般而言,数据采样的插补周期T必须A插补运算时间。A:大于;B:小于;C:等于 数据采样插补又称为数字增量插补,适用于数控机床 C驱动的闭环进给伺服系统。 A:步进电机; B:直流伺服电机;C:交流或直流伺服电机 机床数控系统中的PLC经常被用作 A控制。 A:逻辑顺序;B:智能;C:进给伺服; 目前数控机床高速主轴电机使用最多的是 C。 A:步进电机; B直流伺服电机:C交流伺服电机:D:直线电机数控机床在加工零件时,刀具相对于工件运动的 A 称为对刀点。 A:起点;B:基点;C:原点 伺服系统是一种反馈控制系统。不仅能控制执行件的 C,而且能控制几个执行件按一定运动规律合成的轨迹。 A: 速度;B:速度、
位置; C:速度、方向、位置 旋转变压器是利用电磁感应原理的A 式角位移检测传感器。A:模拟式;B;数字式;C:脉冲式 在 D系统中,进给速度的计算方法是采用数据采样方法进行插补加工,进给速度的计算是根据编程速度F值,将被加工零件轮廓曲线分割为采样周期的轮廓步长。A:闭环;B:半闭环;C:开环;D:闭环和半闭环 数控机床的工作流程包括哪些内容? 答:工作流程包括:①数据加工程序的编制;②输入;③译码; ④刀具补偿;⑤插补;⑥位置控制和机床加工。 后置处理程序的作用是什么? 答:后置处理的目的是生成数据加工程序。由于各种机床使用的控制系统不同,所用的数据加工程序的指令代码及格式也有所不同。为解决这个问题,自动编程软件通常设置一个后置处理程序,在后置处理前,编程人员应根据具体数控机床指令代码及程序的格式,事先编辑好这个文件,这样才能输出符合数控加工格式要求的数控加工DDA直线插补的物理意义是使动点沿速度矢量的方向前进,这种方法同样适用于DDA 圆弧插补。 刀具补偿的作用是把零件轮廓轨迹转换成为刀具中心轨迹 采用步进电机的开环伺服系统,对于数控装置发来的一个进给脉冲经驱动线路放大后驱动步进电机转过一个步距角,经过机械
哈工大机械设计大作业V带传动设计完美版
————————————————————————————————作者:————————————————————————————————日期: ?
Harbin Instituteof Technology 机械设计大作业说明书 大作业名称:机械设计大作业 设计题目:V带传动设计 班级: 设计者: 学号: 指导教师: 设计时间: 2014.10.25 哈尔滨工业大学
目录 一、大作业任务书 ........................................................................................................................... 1 二、电动机的选择 ........................................................................................................................... 1 三、确定设计功率d P ..................................................................................................................... 2 四、选择带的型号 ........................................................................................................................... 2 五、确定带轮的基准直径1d d 和2d d ............................................................................................. 2 六、验算带的速度 ........................................................................................................................... 2 七、确定中心距a 和V 带基准长度d L ......................................................................................... 2 八、计算小轮包角 ........................................................................................................................... 3 九、确定V 带根数Z ........................................................................................................................ 3 十、确定初拉力0F ......................................................................................................................... 3 十一、计算作用在轴上的压力 ....................................................................................................... 4 十二、小V 带轮设计 .. (4) 1、带轮材料选择 ............................................................................................................. 4 2、带轮结构形式 . (4) 十二、参考文献 ............................................................................................................................... 6 ?
哈工大09~12年试题 09年春A 一、填空(10分) 1.液压传动是以为介质,以的形式来传递动力的。 2.液压系统的压力取决于,执行元件的运动速度取决于。 3.液压传动装置由、、 和四部分组成。 4.液压泵按结构可分为、和三种,液压阀按用途可分为、和三种。 5.双出杆活塞缸当缸筒固定缸杆其移动范围为 行程的倍。 6.液压调速阀是由阀和阀联而成。 7.常用的调速回路有、、和三种。 二、简要回答下列问题(20分) 1.解释沿程压力损失和局部压力损失,并写出其表达式。(4) 2.解释齿轮泵的困油现象。(4) 3.解释节流阀的最小稳定流量(4) 4.解释调速回路速度刚度的概念。(4) 5.简述溢流阀和减压阀有什么区别。(4) 三、绘制下列各图(20) 1.定量泵的压力—理论流量、实际流量、容积效率、等特性曲线。(4) 2.限压式变量叶片泵的压力流量特性曲线。(2) 3.节流阀和调速阀的流量压差特性曲线。(4) 4.溢流阀的流量压力特性曲线。(2) 5.变压节流调速机械特性曲线。(3) 6、画出下列液压元件职能符号,并注明相应油口。(5) (1)双向变量马达(2)二位二通机动换向阀(常闭)(3)液控顺序阀 四、系统分析(15) 图示的液压系统能实现快进——工进——快退——原位停止的循环动作。填写电磁铁动作表,并说出液压元件1、2、3、4、7、8的名称和用途。说明,(1)该系统是如何实现快进的;(2)该系统是如何实现速度换接的;(3)该系统是何种调速回路;(4)液压泵是如何卸荷的。
五、计算下列各题(15): 1.已知:油缸面积A 1=100cm 2 、A 2=50cm 2 ,溢流阀调定压力为4MPa ,泵流量q p =40 l/min , 泵的容积效率和机械效率ηv =ηm =0.95进油路节流阀压力损失 △p T =0.6MPa ,节流阀为薄 壁孔,其流量系数C d =0.65,过流面积0.2 cm 2 ,油的密度ρ=900kg/m 3,不计管路压力损失和泄漏。求:油缸的速度、推力和油泵电机功率(8)。 2.油泵排量V p =50ml/r , 转速n p =1000r/min ,容积效率ηvP =0.94,泵工作压力p p =4.5MPa ,马达排量V M =40ml/r ,容积效率和机械效率 ηvm =ηmm =0.9,不计管路压力损失和泄漏,求马达的输出转速n M 转矩T M 和功率P M (7)。 1YA 2YA 3YA 4YA 快进 工进 快退 原位停止 P p ,q p P 1,q 1A 1A 2P 2F V 前进 1 1Y A 2YA 3Y A 4YA 2 3 4 5 6 7 8 P p ,n p V p V M ,ηVM , ηmM , ηvp
数控技术大作业 -标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
2015-16 学年第二学期研究生课程考核 (读书报告、研究报告) 考核科目:数控技术 学生所在院(系):机电工程学院 学生所在学科:机械工程 姓名:杨朔 学号: 1502210088 题目: 1、数控技术的发展趋势 2、叙述比较积分法差补的原理,并画出用软件实现时的流程图 3、描述任意一种数控系统产品的软件结构。 4、简述永磁同步电机矢量控制原理。
1.数控技术的发展趋势 1.1数控技术简介 数控系统是数字控制系统简称,是数控机床的关键技术所在。早期是由硬件电路构成的,称为硬件数控;1970年代以后,硬件电路元件逐步由专用的计算机代替,称为计算机数控系统。CNC系统是根据计算机存储器中存储的控制程序,执行部分或全部数值控制功能,并配有接口电路和伺服驱动装置的专用计算机系统。CNC系统由数控程序输入装置、输出装置、计算机数控装置、可编程逻辑控制器、主轴驱动装置和进给驱动装置等组成。CNC系统的核心是CNC 装置。 1.2数控技术发展的历史与趋势 1.2.1数控技术的发展简史 数控机床是在机械制造技术和控制技术的基础上发展起来的,其过程大致如下: 1948年,美国帕森斯公司接受美国空军委托,研制直升飞机螺旋桨叶片轮廓检验用样板的加工设备。由于样板形状复杂多样,精度要求高,一般加工设备难以适应,于是提出采用数字脉冲控制机床的设想。 1949年,该公司与美国麻省理工学院(MIT)开始共同研究,并于1952年试制成功第一台三坐标数控铣床,当时的数控装置采用电子管元件。 1959年,数控装置采用了晶体管元件和印刷电路板,出现带自动换刀装置的数控机床,称为加工中心( MC Machining Center),使数控装置进入了第二代。 1965年,出现了第三
HarbinI n s t i tut e o fTech n o logy 机械设计大作业说明书大作业名称:轴系设计 设计题目: 5.1.5 班级:1208105 设计者: 学号: 指导教师: 张锋 设计时间:2014.12.03 哈尔滨工业大学
哈尔滨工业大学 机械设计作业任务书 题目___轴系部件设计____ 设计原始数据: 方案电动机 工作功 率P/k W 电动机满 载转速n m /(r/min) 工作机的 转速n w /(r/min) 第一级 传动比 i1 轴承座 中心高 度 H/mm 最短工 作年限 工作环 境 5.1.5 3 710 80 2 170 3年3 班 室内清 洁 目录 一、选择轴的材料 (1) 二、初算轴径 (1) 三、轴承部件结构设计 (1) 3.1轴向固定方式 (2) 3.2选择滚动轴承类型 (2) 3.3键连接设计 (2) 3.4阶梯轴各部分直径确定 (2) 3.5阶梯轴各部段长度及跨距的确定 (2) 四、轴的受力分析 (3) 4.1画轴的受力简图 (3) 4.2计算支反力 (3) 4.3画弯矩图 (3) 4.4画转矩图 (5) 五、校核轴的弯扭合成强度 (5)
六、轴的安全系数校核计算………………………………………………6 七、键的强度校核 (7) 八、校核轴承寿命 (8) 九、轴上其他零件设计 (9) 十、轴承座结构设计 (9) 十一、轴承端盖(透盖).........................................................9参考文献 (10)
一、选择轴的材料 该传动机所传递的功率属于中小型功率,因此轴所承受的扭矩不大。故选45号钢,并进行调质处理。 二、初算轴径 对于转轴,按扭转强度初算直径 3min m P d C n ≥ 式中: P ————轴传递的功率,KW ; m n ————轴的转速,r/mi n; C————由许用扭转剪应力确定的系数,查各种机械设计教材或机械设计手册。 根据参考文献1表9.4查得C=118~106,取C=118, 所以, mm n P C d 6.23355 85.211833==≥ 本方案中,轴颈上有一个键槽,应将轴径增大5%,即 ????d ≥23.6×(1+5%)=24.675mm 按照GB 2822-2005的a R 20系列圆整,取d=25mm。 根据GB/T1096—2003,键的公称尺寸78?=?h b ,轮毂上键槽的尺寸 b=8m m,mm t 2.0013.3+= 三、轴承部件结构设计 由于本设计中的轴需要安装带轮、齿轮、轴承等不同的零件,并且各处受力不同,因此,设计成阶梯轴形式,共分为七段。以下是轴段的草图: 3.1及轴向固定方式 因传递功率小,齿轮减速器效率高、发热小,估计轴不会长,故轴承部件的固定方式可采用两端固定方式。因此,所涉及的轴承部件的结构型式如图2所示。然后,可按轴上零件的安装顺序,从min d 处开始设计。 3.2选择滚动轴承类型 因轴承所受轴向力很小,选用深沟球轴承,因为齿轮的线速度,齿轮转动时飞溅的润滑油不足于润滑轴承,采用油脂对轴承润滑,由于该减速器的工作环境清 洁,脂润滑,密封处轴颈的线速度较低,故滚动轴承采用毡圈密封,由于是悬臂布置所以不用轴上安置挡油板。 3.3 键连接设计 轴段⑦ 轴段⑥ 轴段⑤ 轴段④ 轴段③ 轴段② 轴段① L1 L2 L3 图1
H a r b i n I n s t i t u t e o f T e c h n o l o g y 上机电算说明书 课程名称:机械设计 电算题目:普通V带传动 院系:机电工程学院 班级: 设计者: 学号: 指导教师: 设计时间:2015.11.11-2015.12.1 哈尔滨工业大学
目录 一、普通V带传动的内容 (1) 二、变量标识符 (1) 三、程序框图 (2) 四、V带设计C程序 (3) 五、程序运行截图 (10) 参考文献 (11)
一、普通V带传动的内容 给定原始数据:传递的功率P,小带轮转速n1 传动比i及工作条件 设计内容:带型号,基准长度Ld,根数Z,传动中心距a,带轮基准直径dd1、dd2,带轮轮缘宽度B,初拉力F0和压轴力Q。 二、变量标识符 为了使程序具有较好的可读性易用性,应采用统一的变量标识符,如表1所示。表1变量标识符表。 表1 变量标识符表
三、程序框图
四、V带设计c程序 #include
哈尔滨工业大学 液压传动大作业 设计说明书 设计题目卧式组合机床液压动力滑台机电工程学院班 设计者 2010 年 9 月 10 日 流体控制及自动化系 哈尔滨工业大学 液压传动大作业任务书
学生姓名班号 设计题目钻镗两用卧式组合机床液压动力滑台 1.液压系统用途(包括工作环境和工作条件)及主要参数: 卧式组合机床液压动力滑台。切削阻力F=15kN,滑台自重G=22kN,平面导轨,静摩擦系数0.2,动摩擦系数0.1,快进/退速度5m/min,工进速度100mm/min,最大行程350mm,其中工进行程200mm,启动换向时间0.1s,液压缸机械效率0.9。 2.执行元件类型:液压油缸 3.液压系统名称: 钻镗两用卧式组合机床液压动力滑台。 设计内容 1. 拟订液压系统原理图; 2. 选择系统所选用的液压元件及辅件; 3. 验算液压系统性能; 4. 编写上述1、2、3的计算说明书。 设计指导教师签字 教研室主任签字 年月日签发
目录 1 序言······················································- 1 - 2 设计的技术要求和设计参数 ··············- 2 - 3 工况分析 ··············································- 2 -3.1 确定执行元件 ···································- 2 -3.2 分析系统工况 ···································- 2 -3.3 负载循环图和速度循环图的绘制 ···- 4 -3.4 确定系统主要参数 ···························- 5 - 3.4.1 初选液压缸工作压力·································································- 5 - 3.4.2 确定液压缸主要尺寸·································································- 5 - 3.4.3 计算最大流量需求·····································································- 7 -3.5 拟定液压系统原理图 ·······················- 8 - 3.5.1 速度控制回路的选择·································································- 8 - 3.5.2 换向和速度换接回路的选择 ·····················································- 9 - 3.5.3 油源的选择和能耗控制···························································- 10 - 3.5.4 压力控制回路的选择·······························································- 11 -3.6 液压元件的选择 ·····························- 12 - 3.6.1 确定液压泵和电机规格···························································- 13 - 3.6.2 阀类元件和辅助元件的选择 ···················································- 14 - 3.6.3 油管的选择···············································································- 16 - 3.6.4 油箱的设计···············································································- 18 -3.7 液压系统性能的验算 ·····················- 19 - 3.7.1 回路压力损失验算···································································- 19 - 3.7.2 油液温升验算···········································································- 20 -
杭州师范大学钱江学院课程作业 数控技术课程作业1(共 5 次作业)/涉及章节:第1、2章 一、选择题 1.数控机床的组成部分包括( )。 A.输入装置、光电阅读机、PLC装置、伺服系统、多级齿轮变速系统、刀库 B.输入装置、程序载体、CNC装置、伺服系统、位置反馈系统、机械部件 C.输入装置、程序载体、PLC装置、伺服系统、开环控制系统、机械部件 D.输入装置、CNC装置、多级齿轮变速系统、位置反馈系统、刀库 2.计算机数控系统的优点不包括( C )。 A.利用软件灵活改变数控系统功能,柔性高 B.充分利用计算机技术及其外围设备增强数控系统功能 C.数控系统功能靠硬件实现,可靠性高 D.系统性能价格比高,经济性好 3.准备功能G代码中,能使机床作某种运动的一组代码是( )。 、G01、G02、G03、G40、G41、G42 、G01、G02、G03、G90、G91、G92 、G04、G18、G19、G40、G41、G42 、G02、G03、G17、G40、G41、G42 4.对于卧式数控车床的坐标系,一般以主轴上夹持的工件最远端面作为Z轴的基准点,则Z轴的正方向是( A )。 A.从此基准点沿床身远离工件的方向 B.从此基准点沿床身接近工件的方向 C.从此基准点垂直向上的方向 D.从此基准点垂直向下的方向 二、编程题 1.在图示零件上钻孔。请采用教材中给定的代码格式(JB3208—83)编制加工程序。要求: (1)在给定工件坐标系内用增量尺寸编程,图示钻尖位置为坐标原点; (2)坐标原点为程序的起点和终点,钻孔顺序为Ⅰ→Ⅱ→Ⅲ; (3)进给速度50mm/min,主轴转速600r/min; (4)钻通孔时,要求钻头钻出工件表面4mm。
Harbin Institute of Technology 哈尔滨工业大学 机械设计作业设计计算说明书 题目:设计螺旋起重器(千斤顶) 系别: 班号: 姓名: 日期:
Harbin Institute of Technology 哈尔滨工业大学 机械设计作业任务书 题目:设计螺旋起重器 设计原始数据:题号3.1.1 起重量Fq=30 kN 最大起重高度H=180mm
一 选择螺杆、螺母的材料 螺杆采用45#调制钢,由参考文献[2]表10.2查得抗拉强度b 600 MPa σ=,s 355 MPa σ=。 螺母材料用铝黄铜ZCuAl10Fe3。 二 耐磨性计算 螺杆选用45# 钢,螺母选用铸造铝黄铜ZCuAl10Fe3,由参考文献[1]表 5.8 查得[]p =18~25MPa 从表 5.8 的注释中可以查得,人力驱动时[]p 值可以加大20%,则[]p =21.6~30MPa 取[]25MPa p = 。 按耐磨性条件设计螺纹中径2d ,选用梯形螺纹,则 2d ≥ 由参考文献[1]查得,对于整体式螺母系数2ψ==1.2—2.5,取2ψ=。 则 式中:Q F -----轴向载荷,N ; 2d -----螺纹中径,mm ; []p -----许用压强,MPa ; 查参考文献[2]表11.5取公称直径28d =mm ,螺距3P =mm ,中径226.5d =mm ,小径 324.5d =mm ,内螺纹大径428.5D =mm 。 三 螺杆强度校核 螺杆危险截面的强度条件为: 219.6d mm ≥==
e []σσ=≤ (2) 式中:Q F -----轴向载荷,N ; 3d -----螺纹小径,mm ; 1T -----螺纹副摩擦力矩,2 1tan(') 2Q d T F ψρ=+ (3) ψ为螺纹升角,ψ ; []σ-----螺杆材料的许用应力,MPa 。 查参考文献[1]表5.10得钢对青铜的当量摩擦因数'0.08~0.10f =,螺纹副当量摩擦角 'arctan 'arctan 0.08~arctan 0.10 4.5739~5.7106f ρ===,取'5.7106ρ=(由表5.10的注 释知,大值用于启动时,人力驱动属于间歇式,故应取用大值)。把数据代入(3)式中,得 把数据代入(2)式中,得 由参考文献[1]表5.9可以查得螺杆材料的许用应力 s []4σ σ= (4) 其中s 355 MPa σ=,则 []88.75a MP σ= 显然,e []σσ<,螺杆满足强度条件。 四 螺母螺牙强度校核 螺母螺纹牙根部的剪切强度条件为 4[]Q F Z D b ττπ= ≤ (5) 式中:Q F -----轴向载荷,N ; 4D -----螺母螺纹大径,mm ; 126.5 30000tan(2.0637 5.1427)502612T N mm =??+?= ?70.4e MPa σ==
哈尔滨工业大学 机械设计作业设计计算说明书 题目: 轴系部件设计 系别: 英才学院 班号: 1436005 姓名: 刘璐 日期: 2016.11.12
哈尔滨工业大学机械设计作业任务书 题目:轴系部件设计 设计原始数据: 图1 表 1 带式运输机中V带传动的已知数据 方案d P (KW) (/min) m n r(/min) w n r 1 i轴承座中 心高H(mm) 最短工作 年限L 工作 环境 5.1. 2 4 960 100 2 180 3年3班 室外 有尘 机器工作平稳、单向回转、成批生产
目录 一、带轮及齿轮数据 (1) 二、选择轴的材料 (1) 三、初算轴径d min (1) 四、结构设计 (2) 1. 确定轴承部件机体的结构形式及主要尺寸 (2) 2. 确定轴的轴向固定方式....................................... 错误!未定义书签。 3. 选择滚动轴承类型,并确定润滑、密封方式 .................. 错误!未定义书签。 4. 轴的结构设计................................................ 错误!未定义书签。 五、轴的受力分析 (4) 1. 画轴的受力简图 (4) 2. 计算支承反力 (4) 3. 画弯矩图 (5) 4. 画扭矩图 (5) 六、校核轴的强度 (5) 七、校核键连接的强度 (7) 八、校核轴承寿命 (8) 1. 计算轴承的轴向力 (8) 2. 计算当量动载荷 (8) 3. 校核轴承寿命 (8) 九、绘制轴系部件装配图(图纸) (9) 十、参考文献 (9)
液压传动大作业 一.概念。(每题6分) 1.液压传动:液压传动是用液体作为工作介质来传递能量和进行控制的传动方式。液压传动和气 压传动称为流体传动,是根据17世纪帕斯卡提出的液体静压力传动原理而发展起来的一门新兴技术,是工农业生产中广为应用的一门技术。如今,流体传动技术水平的高低已成为一个国家工业发展水平的重要标志。 。2. 粘度的定义:液体在流动时,在其分子间产生内摩擦的性质,称为液体的黏性,粘性的大小用黏度表示,是用来表征液体性质相关的阻力因子。粘度又分为动力黏度.运动黏度和条件粘度。 。3.气穴现象:气穴来自拉丁文“cavitus”,指空虚、空处的意思。气穴现象是由于机械力,如由穿用的旋转机械力产生的致使液体中的低压气泡突然形成并破裂的现象。。 4.阀的中位机能:换向阀的中位机能是指换向阀里的滑阀处在中间位置或原始位置时阀中各油口的连通形式,体现了换向阀的控制机能。采用不同形式的滑阀会直接影响执行元件的工作状况。因此,在进行工程机械液压系统设计时,必须根据该机械的工作特点选取合适的中位机能的换向阀。中位机能有O型、H型、X型、M型、Y型、P型、J型、C型、K型,等多种形式。。 5. 调速回路速度刚性:其物理意义是引起单位速度变化时负载力的变化量。它是速度-负载特性曲线上某点处斜率的倒数。在特性曲线上某处斜率越小(机械特性硬),速度刚性就越大,液压缸运动速度受负载波动的影响就越小,运动平稳性越好。反之会使运动平稳性变差。 二.简述。(每题8分) 1.双作用叶片泵工作原理:双作用叶片泵由定子,转子,叶片和配油盘等组成转子和定子中心重合,定子内表面近似为椭圆柱形,该椭圆形由两段长半径圆弧,两段短半径圆弧和四段过渡曲线组成。当转子转动时,叶片在离心力和(建压后)根部压力油的作用下,在转子槽内向外移动而压向定子内表面,由叶片、定子的内表面、转子的外表面和两侧配油盘间就形成若干个密封空间,当转子旋转时,处在小圆弧上的密封空间经过渡曲线而运动到大圆弧的过程中,这种叶片外伸,密封空间的容积增大,要吸入油液;再从大圆弧经过渡曲线运动到小圆弧的过程中,叶片被定子内壁逐渐压入槽内,密封空间容积变小,将油从压油口压出。因而,转子每转动一周,每个工作空间要完成两次吸油和压油,称之为双作用叶片泵。
第一章作业:(1) 1.简述国际数控机床经历的三个阶段及发展过程。(1 答:第一阶段:20世纪20年代前,天轴集中传动机床。特征:以蒸汽机或直流发电机——电动机组集中提供动力,天轴传动,塔轮变速,单机不能独立工作。 第二阶段:20世纪20年代后,多电机(交流电机)驱动,齿轮变速机床。机、电、气、液技术结合,出现了以加工汽车零部件为代表的组合机床及其自动线,使大批大量生产的自动化水平在20世纪60年代达到了顶峰。 第三阶段:20世纪50年代后,数字控制与信息化机床。计算机和电子技术与机械 加工过程的联系,机械传动凸轮控制——伺服驱动数字控制,加工中心——工艺集成 2.根据GB/T15375-1994规定确定机床(2 CA6180、XKA5032A、TH5660A型号类型含义。 CA6180 C 车床(类代号) A 结构特性代号 6 组代号(落地及卧式车床) 1 系代号(普通落地及卧式车床) 主参数(最大加工件回转直径800mm) XKA6040AB X 铣床(类代号) K 数控(通用特性代号) A (结构特性代号) 60 卧式升降台铣床(组系代号) 40 工作台面宽度400mm(主参数) B 第二次重大改进(重大改进序号) 第二章作业:(2) 1.机床由哪几部分组成?(3 答:数控机床由1)动力源、2)传动系统、3)支撑件、4)工作部件、5)控制系统、6)冷却系统、7)润滑系统、8)其他装置:如排屑装置,自动测量装置等几部分组成。 2.车床的功能与特点是什么?在普通车床中能否实现二维插补曲线轮廓的加工? 答:1)车床是回转体加工机床,其功能与特点: ①除可加工各类回转表面及端面外,还可加工平面、孔、螺纹等。
中国地质大学(武汉)远程与继续教育学院 数控技术及数控机床课程作业1(共4 次作业) 学习层次:专升本涉及章节:第1章——第2章 一、选择题 1.数控机床的组成部分包括( B ) A.输入装置、光电阅读机、PLC装置、伺服系统、多级齿轮变速系统、刀库 B.输入装置、程序载体、CNC装置、伺服系统、位置反馈系统、机械部件 C.输入装置、程序载体、PLC装置、伺服系统、开环控制系统、机械部件 D.输入装置、CNC装置、多级齿轮变速系统、位置反馈系统、刀库 2.计算机数控系统的优点不包括( C ) A.利用软件灵活改变数控系统功能,柔性高 B.充分利用计算机技术及其外围设备增强数控系统功能 C.数控系统功能靠硬件实现,可靠性高 D.系统性能价格比高,经济性好 3.准备功能G代码中,能使机床作某种运动的一组代码是( A ) 、G01、G02、G03、G40、G41、G42 、G01、G02、G03、G90、G91、G92 、G04、G18、G19、G40、G41、G42 、G02、G03、G17、G40、G41、G42 4.对于卧式数控车床的坐标系,一般以主轴上夹持的工件最远端面作为Z轴的基准点,则Z轴的正方向是(A) A.从此基准点沿床身远离工件的方向 B.从此基准点沿床身接近工件的方向 C.从此基准点垂直向上的方向 D.从此基准点垂直向下的方向 二、填空题 1.能够自动改变机床切削用量,以便实时的适应机床加工状态的控制系统称为_自适应控制系统。 2.确定数控机床坐标系时首先要确定Z轴,它是沿提供切削功率的主轴轴线方向。3.自动编程计算机中的系统软件将程序员编写的源程序处理成计算机可以识别的形式,该系统软件称为编译(或前置处理)程序。 三、编程题 1.在图示零件上钻孔。请采用教材中给定的代码格式(JB3208—83)编制加工程序。 要求: (1)在给定工件坐标系内用增量尺寸编程,图示钻尖位置为坐标原点; (2)坐标原点为程序的起点和终点,钻孔顺序为Ⅰ→Ⅱ→Ⅲ; (3)进给速度50mm/min,主轴转速600r/min; (4)钻通孔时,要求钻头钻出工件表面4mm。
机械原理大作业二 课程名称:机械原理 设计题目:凸轮设计 院系:机电学院 班级: 1208103 完成者: xxxxxxx 学号: xx 指导教师:林琳 设计时间:
工业大学 凸轮设计 一、设计题目 如图所示直动从动件盘形凸轮,其原始参数见表,据此设计该凸轮。 二、凸轮推杆升程、回程运动方程及其线图 1 、凸轮推杆升程运动方程(6 50π?≤ ≤) 升程采用正弦加速度运动规律,故将已知条件mm h 50=,6 50π =Φ带入正弦加速度运动规律的升程段方程式中得: ??? ?? ???? ??-=512sin 215650?ππ?S ;
?? ? ?????? ??-= 512cos 1601ππωv ; ?? ? ??= 512sin 1442 1?π ωa ; 2、凸轮推杆推程远休止角运动方程( π?π ≤≤6 5) mm h s 50==; 0==a v ; 3、凸轮推杆回程运动方程(9 14π ?π≤≤) 回程采用余弦加速度运动规律,故将已知条件mm h 50=,9 5'0π= Φ,6 s π = Φ带入余弦加速度运动规律的回程段方程式中得: ?? ? ???-+=)(59cos 125π?s ; ()π?ω--=59 sin 451v ; ()π?ω-=59 cos 81-a 21; 4、凸轮推杆回程近休止角运动方程(π?π 29 14≤≤) 0===a v s ; 5、凸轮推杆位移、速度、加速度线图 根据以上所列的运动方程,利用matlab 绘制出位移、速度、加速度线图。 ①位移线图 编程如下: %用t 代替转角 t=0::5*pi/6; s=50*((6*t)/(5*pi)-1/(2*pi)*sin(12*t/5)); hold on plot(t,s); t=5*pi/6::pi; s=50; hold on plot(t,s); t=pi::14*pi/9; s=25*(1+cos(9*(t-pi)/5));
《数控技术》思考与练习 《数控技术》 习题集 数控技术各章节习题
第一章 思考题: 1、数控机床、数控技术的基本概念 2、数控机床的特点、组成、各部分作用、分类 3、数控机床的加工原理、使用范围 4、数控技术的发展趋势 5、什么是点位控制、直线控制、轮廓控制数控机床? 6、按伺服系统的控制原理数控机床分哪几类? 7、数控机床的发展趋势主要有哪些? 8、如何提高数控机床的精度、速度和可靠性 https://www.doczj.com/doc/6118129323.html,C装置的主要技术指标有哪些? 第二章 思考题 一、判断题 1.()立铣刀的刀位点是刀具中心线与刀具底面的交点。 2.()球头铣刀的刀位点是刀具中心线与球头球面交点。 3.()由于数控机床的先进性,因此任何零件均适合在数控机床上加工。4.()换刀点应设置在被加工零件的轮廓之外,并要求有一定的余量。5.()为保证工件轮廓表面粗糙度,最终轮廓应在一次走刀中连续加工出来。 二、简答题 1、何谓对刀点? 2、何谓刀位点? 3、何谓换刀点? 4、数控工艺与传统工艺相比有哪些特点? 5、数控编程开始前,进行工艺分析的目的是什么? 6、如何从经济观点出发来分析何种零件在数控机床上加工合适? 7、确定对刀点时应考虑哪些因素? 8、指出立铣刀、球头铣刀和钻头、车刀和镗刀的刀位点。 9、什么是数控编程?简要说明数控编程的内容与步骤 10、准备功能(G)与辅助功能(M)在数控编程中的作用如何?
11、M00、M01、M02、M30的区别在哪里? 12、编程中如何选择对刀点、换刀点? 13、简述数控机床的坐标系及编程特点。 14、什么是“字地址程序段各式”有何特点? 15、数控机床的X、Y、Z坐标轴及其方向如何确定? 16、数控机床坐标系和工件坐标系之间的关系如何? 17、F、S、T功能指令各自的作用? 18、G00、G01、G02、G03的不同点在哪里? 19、什么是零件的加工路线?确定加工路线应遵循的原则? 20、什么是基点和节点? 21、G40、G41、G42、G43、G44的含义如何 22、何谓模态代码和非模态代码?举列说明 23、编写该零件的精加工程序 3 / 8
液压系统动态分析讲义 哈工大机电学院杨庆俊 第一章绪论 我们这门课程,叫液压系统动态分析。顾名思义,是研究液压系统的动态特性。 一、研究对象、内容和意义液压元件与系统都是我们的研究对象,具体可分为三类: (1)具有内反馈机制的液压元件,如溢流阀、恒压泵等。这类元件通过其内部的反馈调节机制,控制压力、流量或者是功率为恒定值。对于液压技术而言, 这类元件内容丰富,常代表了液压元件的尖端,就其局部而言,其复杂度往往 不低于一个常规的液压伺服系统。 (2)液压传动系统。这类系统工作在开环状态,系统在有限的几个状态之间切换以完成规定的功能。尽管系统工作在开环状态,其内多数情况下仍然会有具有反 馈机制的液压元件如溢流阀等。 (3)液压伺服控制系统。这类系统整体工作在闭环反馈方式。通常采用传感器测量某个被控制量,如压力、位移、加速度等等,通过控制阀的调节作用使被控制量 满足要求的变化规律。 这三类对象中,第三类“液压伺服控制系统” 已有专门课程介绍其分析和设计,因此本课程不再包括这部分内容。本课程所涉及的就是前两类对象。 动态分析,就是研究上述元件和系统的动态特性,即元件与系统工作状态转换过程的特性。因对象性质的不同,动态特性所关注的内容也有所区别。 对于第一类内反馈式元件,动态分析的主要内容如下: (1)稳定性。因其存在反馈作用,动态分析最关注的就是能否稳定工作。影响稳定性的因素有多方面。第一,该类元件在设计条件下,是否存在由于内部参数设计 不合理导致的不稳定;第二,在系统中使用时,与该元件上下游的连接条件发生 变化,是否会出现由此引起的稳定性问题;第三,即使硬件连接相同,元件的 工作参数如压力、流量等也会有一定的变化,是否会出现因此而引起的稳定性问 题。 (2)对干扰因素的抑制特性。总有一些量的变化会引起被控制量的变化,如溢流阀溢流流量的变化会引起设定压力的变化。当这些干扰发生变化时,被控量的响应 过程,如最大变化幅度、恢复稳定时间、振荡次数、最终稳定值等,是我们所关 心的。 (3)对指令的响应。当指令信号改变时,被控量跟随变化的特性,如跟随的快速性、超调量、振荡次数等。 对于第二类对象,因其工作在开环状态,故没有稳定性问题。系统内所含有的内反馈式元件特性归于第一类中研究。动态分析的主要内容如下: (1)启车、停车过程的快速性与平稳性。这两者是矛盾的,设计不当可能会使一种特性严重不足。快速性不足则影响效率,而平稳性不足则会影响寿命。对于频 繁启停的系统,这两个特性更是至关重要。 2)不同工作状态间切换的快速性、平稳性和精确性。如快进与工进的切换,行程