当前位置:
文档之家› MATLAB软件在机械优化设计中的应用研究
MATLAB软件在机械优化设计中的应用研究
摘要本文分析了MATLAB软件在机械优化设计中常用的线性规划、一维优化、无约束非线性优化及约束非线性优化四种优化问题的标准数学模型、调用函数及参数的设置。并以具体实例对利用MATLAB解决优化问题的具体过程进行了详细的阐述,该过程可以供工程设计人员参考,以提高优化设计效率。
关键词机械优化设计MATLAB
Research on Application of MATLAB Software in Mecha-nical Optimization Design//Jiao Lili
Abstract Standard mathematical model,function and the para-meter settings of matlab software which used in mechanical optimization design such as linear programming,one-dimensional optimization,unconstrained nonlinear optimization and constrained nonlinear optimization were analyzed.Specific process of solving the optimization problem with Matlab is expounded by concrete examples,the process could be referenced by engineering staff, and then improve the efficiency optimization design.
Key words mechanism;optimization design;Matlab
Author's address Faculty of UG,Yancheng Institute of Techn-ology,224051,Yancheng,Jiangsu,China
机械优化设计就是在给定的载荷或环境条件下,在对机械产品的形态、几何尺寸关系以及其他因素的限制(约束)范围内,以机械系统的功能、强度和经济性等为优化对象,选取设计变量,建立目标函数和约束条件,并使目标函数获得最优值的一种现代设计方法。目前,已有很多成熟的优化方法程序可供选择,但它们各有自己的特点和适用范围,实际应用时必须注意因为优化方法或初始参数选择而带来的收敛性等问题。而M ATLAB语言的优化工具箱则选用最佳方法求解、初始参数输入简单、语法符合工程设计语言要求、编程工作量小、优越性明显。
1MATLAB优化函数介绍
M ATLAB是美国M athWorks公司于20世纪80年代中期推出的数学软件,其优秀的数值计算能力和卓越的数据可视化能力使其很快在数学软件中脱颖而出。M ATLAB优化工具箱可以解决线性规划、非线性规划和多目标规划等问题。具体包括线性、非线性最小化,最大最小化,二次规划,半无限问题,线性、非线性方程(组)的求解,线性、非线性的最小二乘问题以及整数规划等问题的求解。另外,该工具箱还提供了线性、非线性最小化,方程求解,曲线拟合,二次规划等问题中的大型课题的求解方法。为优化方法在工程中的实际应用提供了更方便快捷的途径。
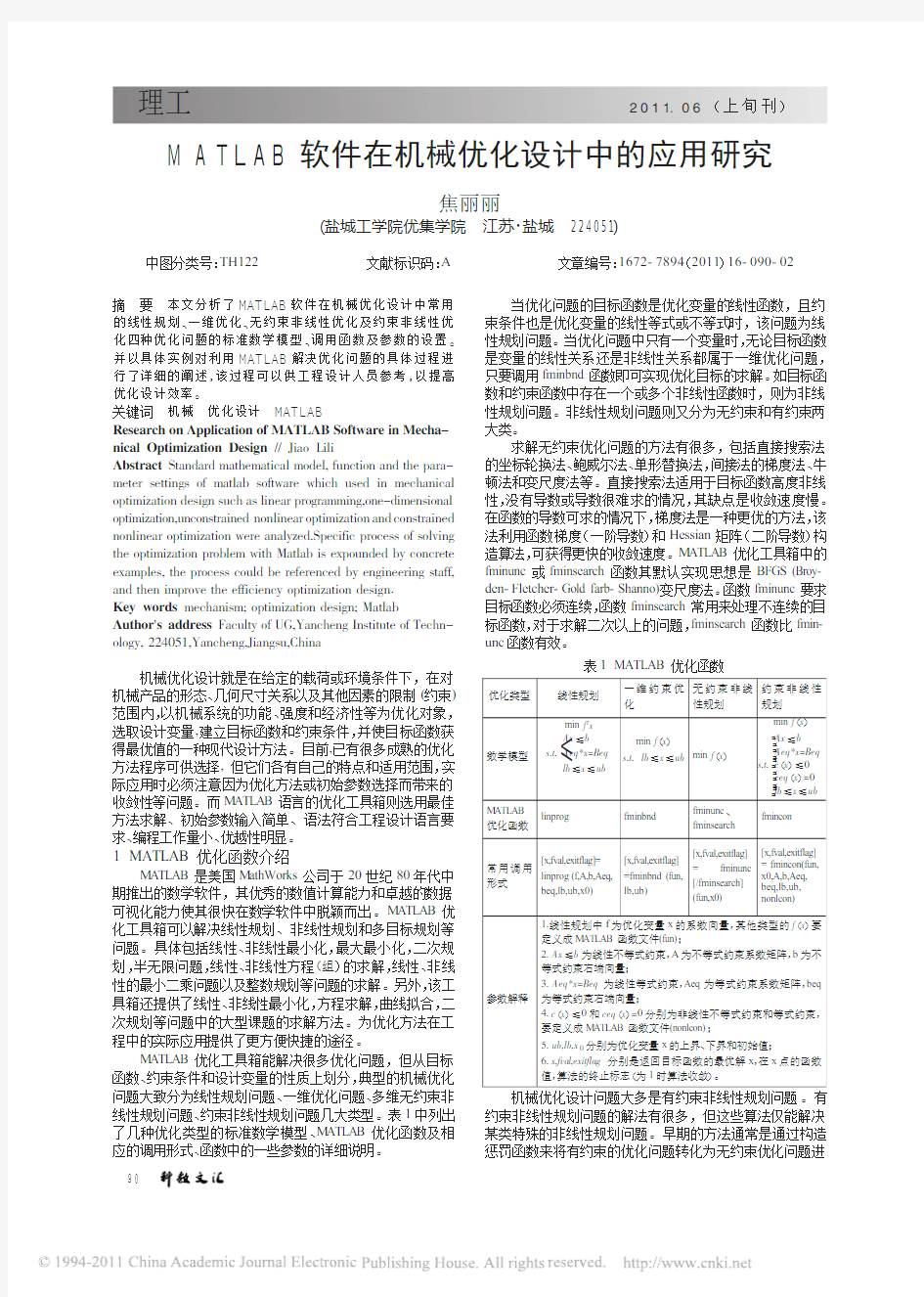
M ATLAB优化工具箱能解决很多优化问题,但从目标函数、约束条件和设计变量的性质上划分,典型的机械优化问题大致分为线性规划问题、一维优化问题、多维无约束非线性规划问题、约束非线性规划问题几大类型。表1中列出了几种优化类型的标准数学模型、M ATLAB优化函数及相应的调用形式、函数中的一些参数的详细说明。
当优化问题的目标函数是优化变量的线性函数,且约束条件也是优化变量的线性等式或不等式时,该问题为线性规划问题。当优化问题中只有一个变量时,无论目标函数是变量的线性关系还是非线性关系都属于一维优化问题,只要调用fminbnd函数即可实现优化目标的求解。如目标函数和约束函数中存在一个或多个非线性函数时,则为非线性规划问题。非线性规划问题则又分为无约束和有约束两大类。
求解无约束优化问题的方法有很多,包括直接搜索法的坐标轮换法、鲍威尔法、单形替换法,间接法的梯度法、牛顿法和变尺度法等。直接搜索法适用于目标函数高度非线性,没有导数或导数很难求的情况,其缺点是收敛速度慢。在函数的导数可求的情况下,梯度法是一种更优的方法,该法利用函数梯度(一阶导数)和Hessian矩阵(二阶导数)构造算法,可获得更快的收敛速度。M ATLAB优化工具箱中的fminunc或fminsearch函数其默认实现思想是BFGS(Broy-den-Fletcher-Gold farb-Shanno)变尺度法。函数fminunc要求目标函数必须连续,函数fminsearch常用来处理不连续的目标函数,对于求解二次以上的问题,fminsearch函数比fmin-unc函数有效。
机械优化设计问题大多是有约束非线性规划问题。有约束非线性规划问题的解法有很多,但这些算法仅能解决某类特殊的非线性规划问题。早期的方法通常是通过构造惩罚函数来将有约束的优化问题转化为无约束优化问题进
中图分类号:TH122文献标识码:A文章编号:1672-7894(2011)16-090-02
优化类型线性规划一维约束优
化
无约束非线
性规划
约束非线性
规划
数学模型min f(x)
M ATLAB 优化函数linprog fminbnd
fminunc、
fminsearch
fmincon
常用调用形式[x,fval,exitflag]=
linprog(f,A,b,Aeq,
beq,lb,ub,x0)
[x,fval,exitflag]
=fminbnd(fun,
lb,ub)
[x,fval,exitflag]
=fminunc
[/fminsearch]
(fun,x0)
[x,fval,exitflag]
=fmincon(fun,
x0,A,b,Aeq,
beq,lb,ub,
nonlcon)
参数解释1.线性规划中f为优化变量x的系数向量,其他类型的f(x)要定义成M ATLAB函数文件(fun);
2.Ax≤b为线性不等式约束,A为不等式约束系数矩阵,b为不等式约束右端向量;
3.Aeq*x=Beq为线性等式约束,Aeq为等式约束系数矩阵,beq 为等式约束右端向量;
4.c(x)≤0和ceq(x)=0分别为非线性不等式约束和等式约束,要定义成M ATLAB函数文件(nonlcon);
5.ub,lb,x0分别为优化变量x的上界、下界和初始值;
6.x,fval,exitflag分别是返回目标函数的最优解x,在x点的函数值,算法的终止标志(为1时算法收敛)。
表1MATLAB优化函数
min f T x
s.t.
Ax≤b
Aeq*x=Beq
lb≤x≤u
≤
b
s.t.lb≤x≤ub
min f(x)
s.t.
Ax≤b
Aeq*x=Beq
c(x)≤0
ceq(x)=0
lb≤x≤u
≤
≤
≤
≤≤
≤
≤
≤
≤≤
≤
b
min f(x)
90
造变尺度矩阵,以保证超线性收敛性,调用fmincon函数求解约束优化问题。
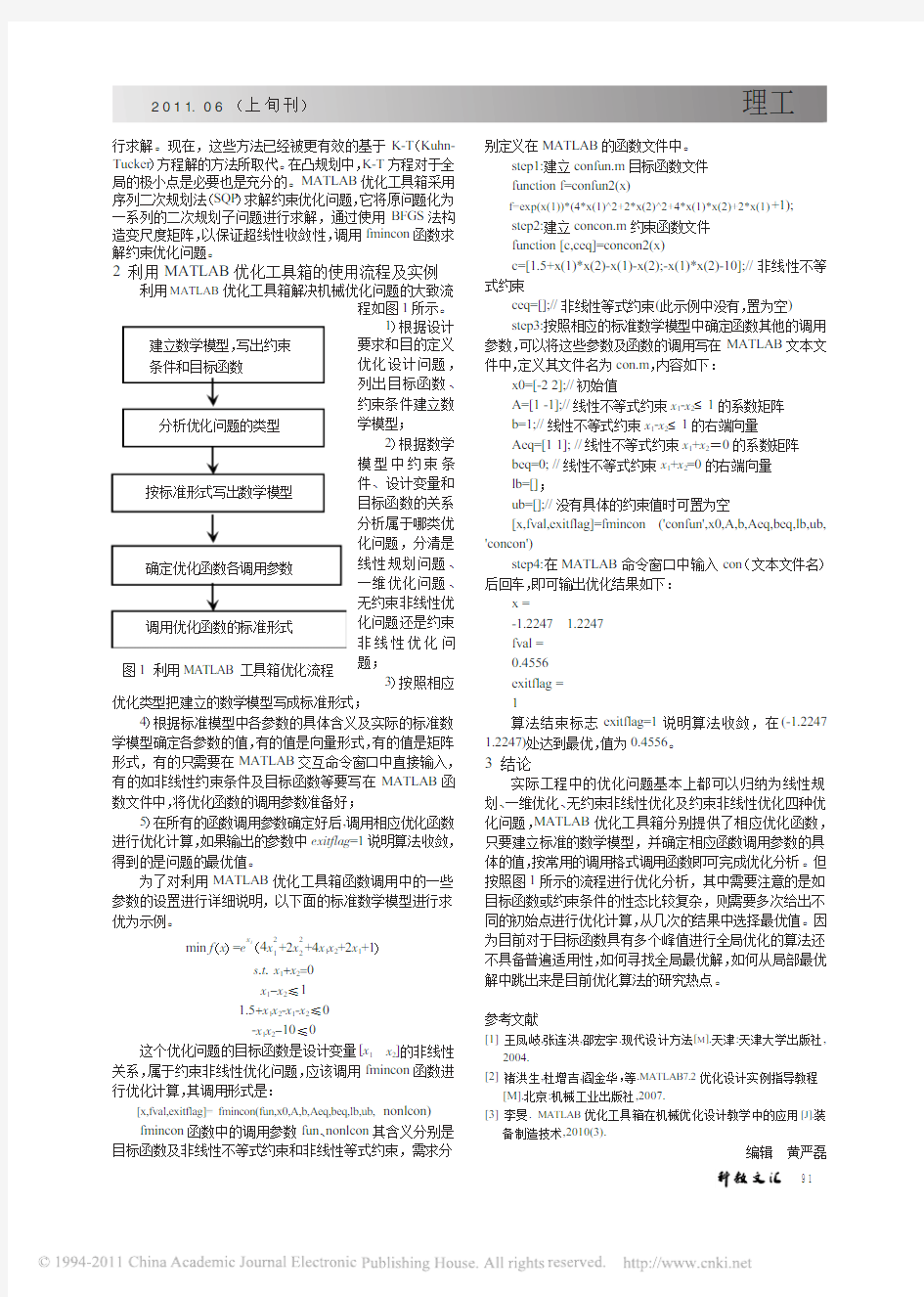
2利用MATLAB优化工具箱的使用流程及实例利用MATLAB优化工具箱解决机械优化问题的大致流
程如图1所示。
1)根据设计
要求和目的定义
优化设计问题,
列出目标函数、
约束条件建立数
学模型;
2)根据数学
模型中约束条
件、设计变量和
目标函数的关系
分析属于哪类优
化问题,分清是
线性规划问题、
一维优化问题、
无约束非线性优
化问题还是约束
非线性优化问
题;
3)按照相应优化类型把建立的数学模型写成标准形式;
4)根据标准模型中各参数的具体含义及实际的标准数学模型确定各参数的值,有的值是向量形式,有的值是矩阵形式,有的只需要在MATLAB交互命令窗口中直接输入,有的如非线性约束条件及目标函数等要写在MATLAB函数文件中,将优化函数的调用参数准备好;
5)在所有的函数调用参数确定好后,调用相应优化函数进行优化计算,如果输出的参数中exitflag=1说明算法收敛,得到的是问题的最优值。
为了对利用MATLAB优化工具箱函数调用中的一些参数的设置进行详细说明,以下面的标准数学模型进行求优为示例。
min f(x)=e x1(4x2
1+2x2
2
+4x1x2+2x1+1)
s.t.x1+x2=0
x1-x2≤1
1.5+x1x2-x1-x2≤0
-x1x2-10≤0
这个优化问题的目标函数是设计变量[x
1
x2]的非线性关系,属于约束非线性优化问题,应该调用fmincon函数进行优化计算,其调用形式是:
[x,fval,exitflag]=fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon)
fmincon函数中的调用参数fun、nonlcon其含义分别是目标函数及非线性不等式约束和非线性等式约束,需求分
step2:建立concon.m约束函数文件
function[c,ceq]=concon2(x)
c=[1.5+x(1)*x(2)-x(1)-x(2);-x(1)*x(2)-10];//非线性不等式约束
ceq=[];//非线性等式约束(此示例中没有,置为空)
step3:按照相应的标准数学模型中确定函数其他的调用参数,可以将这些参数及函数的调用写在MATLAB文本文件中,定义其文件名为con.m,内容如下:
x0=[-22];//初始值
A=[1-1];//线性不等式约束x1-x2≤1的系数矩阵
b=1;//线性不等式约束x1-x2≤1的右端向量
Aeq=[11];//线性不等式约束x1+x2=0的系数矩阵
beq=0;//线性不等式约束x1+x2=0的右端向量
lb=[];
ub=[];//没有具体的约束值时可置为空
[x,fval,exitflag]=fmincon('confun',x0,A,b,Aeq,beq,lb,ub, 'concon')
step4:在MATLAB命令窗口中输入con(文本文件名)后回车,即可输出优化结果如下:
x=
-1.2247 1.2247
fval=
0.4556
exitflag=
1
算法结束标志exitflag=1说明算法收敛,在(-1.2247 1.2247)处达到最优,值为0.4556。
3结论
实际工程中的优化问题基本上都可以归纳为线性规划、一维优化、无约束非线性优化及约束非线性优化四种优化问题,MATLAB优化工具箱分别提供了相应优化函数,只要建立标准的数学模型,并确定相应函数调用参数的具体的值,按常用的调用格式调用函数即可完成优化分析。但按照图1所示的流程进行优化分析,其中需要注意的是如目标函数或约束条件的性态比较复杂,则需要多次给出不同的初始点进行优化计算,从几次的结果中选择最优值。因为目前对于目标函数具有多个峰值进行全局优化的算法还不具备普遍适用性,如何寻找全局最优解,如何从局部最优解中跳出来是目前优化算法的研究热点。
参考文献
[1]王凤岐,张连洪,邵宏宇.现代设计方法[M].天津:天津大学出版社,
2004.
[2]褚洪生,杜增吉,阎金华,等.MATLAB7.2优化设计实例指导教程
[M].北京:机械工业出版社,2007.
[3]李旻.MATLAB优化工具箱在机械优化设计教学中的应用[J].装
备制造技术,2010(3).
编辑黄严磊
建立数学模型,写出约束
条件和目标函数
分析优化问题的类型
按标准形式写出数学模型
确定优化函数各调用参数
调用优化函数的标准形式
图1利用MATLAB工具箱优化流程
91
机械优化设计实验指导书
机械优化设计实验指导 书 Document number【AA80KGB-AA98YT-AAT8CB-2A6UT-A18GG】
《机械优化设计》 实验指导书 武秋敏编写 院系:印刷包装工程学院 专业:印刷机械 西安理工大学 二00七年九月 上机实验说明 【实验环境】 操作系统: Microsoft Windows XP 应用软件:Visual C++或TC。 【实验要求】 1、每次实验前,熟悉实验目的、实验内容及相关的基本理论知识。 2、无特殊要求,原则上实验为1人1组,必须独立完成。 3、实验所用机器最好固定,以便更好地实现实验之间的延续性和相关性,并便于检查。 4、按要求认真做好实验过程及结果记录。 【实验项目及学时分配】 【实验报告和考核】 1、实验报告必需采用统一的实验报告纸,撰写符合一定的规范,详见实验报告撰写格式及规范。
(一)预习准备部分 1. 预习本次实验指导书中一、二、三部分内容。 2. 按照程序框图试写出汇编程序。 (二)实验过程部分 1. 写出经过上机调试后正确的程序,并说明程序的功能、结构。 2. 记录4000~40FFH内容在执行程序前后的数据结果。 3. 调试说明,包括上机调试的情况、上机调试步骤、调试所遇到的问题是如何解决的,并对调试过程中的问题进行分析,对执行结果进行分析。 (三)实验总结部分
实验(一) 【实验题目】 一维搜索方法 【实验目的】 1.熟悉一维搜索的方法-黄金分割法,掌握其基本原理和迭代过程; 2.利用计算语言(C语言)编制优化迭代程序,并用给定实例进行迭代验证。 【实验内容】 1.根据黄金分割算法的原理,画出计算框图; 2.应用黄金分割算法,计算:函数F(x)=x2+2x,在搜索区间-3≤x≤5时,求解其极小点X*。 【思考题】 说明两种常用的一维搜索方法,并简要说明其算法的基本思想。 【实验报告要求】 1.预习准备部分:给出实验目的、实验内容,并绘制程序框图; 2.实验过程部分:编写上机程序并将重点语句进行注释;详细描述程序的调过程(包括上机调试的情况、上机调试步骤、调试所遇到的问题是如何解决的,并对调试过程中的问题进行分析。 3.实验总结部分:对本次实验进行归纳总结,给出求解结果。要求给出6重迭代中a、x1、x2、b、y1和y2的值,并将结果与手工计算结果进行比较。 4.回答思考题。
机械优化设计论文(基于MATLAB工具箱的机械优化设计)
基于MATLAB工具箱的机械优化设计 长江大学机械工程学院机械11005班刘刚 摘要:机械优化设计是一种非常重要的现代设计方法,能从众多的设计方案中找出最佳方案,从而大大提高设计效率和质量。本文系统介绍了机械优化设计的研究内容及常规数学模型建立的方法,同时本文通过应用实例列举出了MATLAB 在工程上的应用。 关键词:机械优化设计;应用实例;MATLAB工具箱;优化目标 优化设计是20世纪60年代随计算机技术发展起来的一门新学科, 是构成和推进现代设计方法产生与发展的重要内容。机械优化设计是综合性和实用性都很强的理论和技术, 为机械设计提供了一种可靠、高效的科学设计方法, 使设计者由被动地分析、校核进入主动设计, 能节约原材料, 降低成本, 缩短设计周期, 提高设计效率和水平, 提升企业竞争力、经济效益与社会效益。国内外相关学者和科研人员对优化设计理论方法及其应用研究十分重视, 并开展了大量工作, 其基本理论和求解手段已逐渐成熟。 国内优化设计起步较晚, 但在众多学者和科研人员的不懈努力下, 机械优化设计发展迅猛, 在理论上和工程应用中都取得了很大进步和丰硕成果, 但与国外先进优化技术相比还存在一定差距, 在实际工程中发挥效益的优化设计方案或设计结果所占比例不大。计算机等辅助设备性能的提高、科技与市场的双重驱动, 使得优化技术在机械设计和制造中的应用得到了长足发展, 遗传算法、神经网络、粒子群法等智能优化方法也在优化设计中得到了成功应用。目前, 优化设计已成为航空航天、汽车制造等很多行业生产过程的一个必须且至关重要的环节。 一、机械优化设计研究内容概述 机械优化设计是一种现代、科学的设计方法, 集思考、绘图、计算、实验于一体, 其结果不仅“可行”, 而且“最优”。该“最优”是相对的, 随着科技的发展以及设计条件的改变, 最优标准也将发生变化。优化设计反映了人们对客观世界认识的深化, 要求人们根据事物的客观规律, 在一定的物质基和技术条件下充分发挥人的主观能动性, 得出最优的设计方案。 优化设计的思想是最优设计, 利用数学手段建立满足设计要求优化模型; 方法是优化方法, 使方案参数沿着方案更好的方向自动调整, 以从众多可行设计方案中选出最优方案; 手段是计算机, 计算机运算速度极快, 能够从大量方案中选出“最优方案“。尽管建模时需作适当简化, 可能使结果不一定完全可行或实际最优, 但其基于客观规律和数据, 又不需要太多费用, 因此具有经验类比或试验手段无可比拟的优点, 如果再辅之以适当经验和试验, 就能得到一个较圆满的优化设计结果。 传统设计也追求最优结果, 通常在调查分析基础上, 根据设计要求和实践
matlab基础与指导应用部分习题问题详解
作业一 4、写出完成下列操作的命令。 (1)将矩阵A第2~5行中第1,3,5列元素赋给矩阵B。>> M=[0:1:48]; >> A=reshape(M,7,7) A = 0 7 14 21 28 35 42 1 8 15 2 2 29 36 43 2 9 16 2 3 30 37 44 3 10 17 2 4 31 38 45 4 11 18 2 5 32 39 46 5 12 19 2 6 33 40 47 6 13 20 2 7 34 41 48 >> B=A(2:5,1:2:5) B = 1 15 29 2 16 30 3 17 31 4 18 32 (2)删除矩阵A的第七行元素。 >> A(7,:)=[] A = 0 7 14 21 28 35 42 1 8 15 2 2 29 36 43 2 9 16 2 3 30 37 44 3 10 17 2 4 31 38 45 4 11 18 2 5 32 39 46 5 12 19 2 6 33 40 4 7 (3)将矩阵A的每个元素值加30。 >> A=A+30 A = 30 37 44 51 58 65 72 31 38 45 52 59 66 73 32 39 46 53 60 67 74
33 40 47 54 61 68 75 34 41 48 55 62 69 76 35 42 49 56 63 70 77 (4求矩阵A的大小和维素。 sizeA = size(A) dA = ndims(A) sizeA = 6 7 dA = 2 (5)将向量t的0元素用机器零来代替。 >> t=[1 2 3 4 0 5]; t = 1 2 3 4 0 5 >> find(t==0) ans = 5 >> t(5)=eps t = 1.0000 2.0000 3.0000 4.0000 0.0000 5.0000 (6)将含有12个元素的向量x转换成3*4矩阵。 >> x=[0:11] x = 0 1 2 3 4 5 6 7 8 9 10 11 >> y=reshape(x,3,4) y =
机械优化设计复习总结.doc
1. 优化设计问题的求解方法:解析解法和数值近似解法。解析解法是指优化对象用数学方程(数学模型)描述,用 数学 解析方法的求解方法。解析法的局限性:数学描述复杂,不便于或不可能用解析方法求解。数值解法:优 化对象无法用数学方程描述,只能通过大量的试验数据或拟合方法构造近似函数式,求其优化解;以数学原理 为指导,通过试验逐步改进得到优化解。数值解法可用于复杂函数的优化解,也可用于没有数学解析表达式的 优化问题。但不能把所有设计参数都完全考虑并表达,只是一个近似的数学描述。数值解法的基本思路:先确 定极小点所在的搜索区间,然后根据区间消去原理不断缩小此区间,从而获得极小点的数值近似解。 2. 优化的数学模型包含的三个基本要素:设计变量、约束条件(等式约束和不等式约束)、目标函数(一般使得目 标 函数达到极小值)。 3. 机械优化设计中,两类设计方法:优化准则法和数学规划法。 优化准则法:x ;+, = c k x k (为一对角矩阵) 数学规划法:X k+x =x k a k d k {a k \d k 分别为适当步长\某一搜索方向一一数学规划法的核心) 4. 机械优化设计问题一般是非线性规划问题,实质上是多元非线性函数的极小化问题。重点知识点:等式约束优 化问 题的极值问题和不等式约束优化问题的极值条件。 5. 对于二元以上的函数,方向导数为某一方向的偏导数。 函数沿某一方向的方向导数等于函数在该点处的梯度与这一方向单位向量的内积。梯度方向是函数值变化最快的方 向(最速上升方向),建议用单位向暈表示,而梯度的模是函数变化率的最大值。 6. 多元函数的泰勒展开。 7. 极值条件是指目标函数取得极小值吋极值点应满足的条件。某点取得极值,在此点函数的一阶导数为零,极值 点的 必要条件:极值点必在驻点处取得。用函数的二阶倒数来检验驻点是否为极值点。二阶倒数大于冬,取得 极小值。二阶导数等于零时,判断开始不为零的导数阶数如果是偶次,则为极值点,奇次则为拐点。二元函数 在某点取得极值的充分条件是在该点岀的海赛矩阵正定。极值点反映函数在某点附近的局部性质。 8. 凸集、凸函数、凸规划。凸规划问题的任何局部最优解也就是全局最优点。凸集是指一个点集或一个区域内, 连接 英中任意两点的线段上的所有元素都包含在该集合内。性质:凸集乘上某实数、两凸集相加、两凸集的交 集仍是凸集。凸函数:连接凸集定义域内任意两点的线段上,函数值总小于或等于用任意两点函数值做线性内 插所得的值。数学表达:/[^+(l-a )x 2]机械优化设计方法论文
浅析机械优化设计方法基本理论 【摘要】在机械优化设计的实践中,机械优化设计是一种非常重要的现代设计方法,能从众多的设计方案中找出最佳方案,从而大大提高设计的效率和质量。每一种优化方法都是针对某一种问题而产生的,都有各自的特点和各自的应用领城。在综合大量文献的基础上,总结机械优化设计的特点,着重分析常用的机械优化设计方法,包括无约束优化设计方法、约束优化设计方法、基因遗传算方法等并提出评判的主 要性能指标。 【关键词】机械;优化设计;方法特点;评价指标 一、机械优化概述 机械优化设计是适应生产现代化要求发展起来的一门科学,它包括机械优化设计、机械零部件优化设计、机械结构参数和形状的优化设计等诸多内容。该领域的研究和应用进展非常迅速,并且取得了可观的经济效益,在科技发达国家已将优化设计列为科技人员的基本职业训练项目。随着科技的发展,现代化机械优化设计方法主要以数学规划为核心,以计算机为工具,向着多变量、多目标、高效率、高精度方向发展。]1[ 优化设计方法的分类优化设计的类别很多,从不同的角度出发,可以做出各种不同的分类。按目标函数的多少,可分为单目标优化设计方法和多目标优化设计方法按维数,可分为一维优化设计方法和多维优化设计方法按约束情况,可分为无约束优化设计方法和约束优化设计方法按寻优途径,可分为数值法、解析法、图解法、实验法和情况研究法按优化设计问题能否用数学模型表达,可分为能用数学模型表达的优化设计问题其寻优途径为数学方法,如数学规划法、最优控制法等。 1.1 设计变量 设计变量是指在设计过程中进行选择并最终必须确定的各项独立参数,在优化过程中,这些参数就是自变量,一旦设计变量全部确定,设计方案也就完全确定了。设计变量的数目确定优化设计的维数,设计变量数目越多,设计空间的维数越大。优化设计工作越复杂,同时效益也越显著,因此在选择设计变量时。必须兼顾优化效果的显著性和优化过程的复杂性。
MATLAB基础及应用实验指导书
MATLAB基础及应用实验指导书
MATLAB基础及应用课程实验指导书 实验一软件环境和基本操作熟悉 一、实验目的 ①熟悉MATLAB 主界面,并学会简单的菜单操作。 ②学会简单的矩阵输入与信号输入。 ③掌握部分绘图函数。 二、实验内容 熟悉MATLAB操作环境,通过简单操作熟悉MATLAB的基本使用方法。 三、实验要求与步骤 1、用户第一次使用MATLAB 时,建议首先在屏幕上键入demo 命令,它将启动MATLAB 的演试程序,用户可在此演示程序中领略MATLAB 所提供的强大的运算与绘图功能。也可以键入help 进行进一步了解。 MATLAB 启动界面如图所示: MATLAB 语言最基本的赋值语句结构为:变量名列表= 表达式。表达式由操作符或其它字符,函数和变量名组成,表达式的结果为一个矩阵,显示在屏幕上,同时输送到一个变量中并存放于工作空间中以备调用。如果变量名和“= ”省略,则ans 变量将自动建立,例如键入:1900/81 ,得到输出结果:ans =23.4568 。 MATLAB 中变量命名的原则要求必须以英文字母开头,文件夹名字中可以
还包括、下划线和数字,不要使用其他的字符,更不要单纯使用数字或者中文名命名,有时在运行MATLAB 中一些莫名的错误可能就是不规范的命名引起的。这种规则包括将来为自己编写的脚本文件、函数文件命名以及为使用的变量命名也应遵循这个规则。 2、用户工作目录和当前目录的建立和设置 1)为管理方便,每个用户在使用MATLAB 前,尽量为自己建立一个专门的工作目录,即“用户目录”,用来存放自己创建应用文件。例如首先打开资源管理器,在E 驱动器下可以根据自己喜好建立一个新文件夹,但应注意:该文件夹必须以英文开头,文件夹名字中可以包括字母、下划线和数字,不要使用其他的字符,更不要单纯使用数字或者中文名命名,有时在运行MATLAB 中一些莫名的错误可能就是不规范的命名引起的,这与MATLAB 中为变量和文件名命名原则是一致的。尽管MATLAB\work 允许用户存放用户文件,但最好把它仅作为临时工作目录来使用。 2)为了用户运行方便,在开始工作前可把用户定义的目录设置为当前目录,方法是可直接在MATLAB 命令窗口桌面上方通过目录设置栏来实现。 3)把自己的工作目录加到MATLAB 搜索路径上,这样可以在任何情况下方便地调用自己的编写文件。MATLAB 工作时,基本搜索过程为:首先在工作空间,即MATLAB 内存中进行检查,看输入的指令是不是变量;如不是,则检查输入指令是不是内建函数(比如sin 函数等);如不是,则在当前目录上,检查是否有与输入指令相同的M 文件存在;如还没有,则在MATLAB 定义的搜索路径其他目录中,检查是否有该M 文件存在。设置方法是通过File 菜单下设置路径对话框进行。 3、熟悉简单的矩阵输入 1)从屏幕上输入矩阵A=[1 2 3 ;4 5 6;7 8 9] 回车 A=[1,2,3;4,5,6;7,8,9] 回车 观察输出结果。 2)试用回车代替分号,观察输出结果。 3)输入size(A) ,观察结果。 4)输入矩阵B=[9,8,7;6,5,4;3,2,1];回车 输入矩阵C=[4,5,6;7,8,9;1,2,3];回车,然后分别键入 A B C 回车观察结果。 5)选择File | new 菜单中的M-file ,输入B=[9,8,7;6,5,4;3,2,1] ;保存为
机械优化设计MATLAB程序文件
机械优化设计作业1.用二次插值法求函数()()()22 ?极小值,精度e=0.01。 t t =t 1- + 在MATLAB的M文件编辑器中编写的M文件,如下: f=inline('(t+1)*(t-2)^2','t') a=0;b=3;epsilon=0.01; t1=a;f1=f(t1); t3=b;f3=f(t3); t2=0.5*(t1+t3);f2=f(t2); c1=(f3-f1)/(t3-t1); c2=((f2-f1)/(t2-t1)-c1)/(t2-t3); t4=0.5*(t1+t3-c1/c2);f4=f(t4); k=0; while(abs(t4-t2)>=epsilon) if t2f4 f1=f2;t1=t2; t2=t4;f2=f4; else f3=f4;t3=t4; end else if f2>f4 f3=f2;t3=t2; t2=t4;f2=f4; else f1=f4;t2=t4; end end c1=(f3-f1)/(t3-t1); c2=((f2-f1)/(t2-t1)-c1)/(t2-t3); t4=0.5*(t1+t3-c1/c2);f4=f(t4); k=k+1; end %输出最优解 if f2>f4 t=t4;f=f(t4); else t=t2;f=f(t2); end fprintf(1,'迭代计算k=%3.0f\n',k) fprintf(1,'极小点坐标t=%3.0f\n',t) fprintf(1,'函数值f=%3.4f\n',f)
运行结果如下: 迭代计算k= 7 极小点坐标t= 2 函数值f=0.0001 2.用黄金分割法求函数()32321+-=t t t ?的极小值,精度e=0.01。 在MATLAB 的M 文件编辑器中编写的M 文件,如下: f=inline('t^(2/3)-(t^2+1)^(1/3)','t'); a=0;b=3;epsilon=0.01; t1=b-0.618*(b-a);f1=f(t1); t2=a+0.618*(b-a);f2=f(t2); k=1; while abs(b-a)>=epsilon if f1机械优化设计考试重点
机械优化设计复习点 判断题,分析题,计算题 一,优化问题的基本解法(简答填空题)p27 (1)画图法找最小点 (2)解析解法 (3)数值的近似解法 二,数学基础(简答题) (1)方向导数和梯度(概念,关系)p31 p32 (2)泰勒展开的物理含义及表达式p35 物理含义:泰勒展开在优化方法中十分重要,许多方法及其收敛性证明都是从泰勒出发的,是把方程g(x)=0的解,写成曲线方程的形式看看和x轴有什么交点。泰勒公式的应用一般有三个方面: 1、利用泰勒展开式做代换求函数的极限。 2、利用泰勒展开式证明一些等式或者不等式。 3、应用拉格朗日余项,可以估值,求近似值。 表达式:矩阵形式和线性代数形式 p35 (3)极值条件 在什么条件下判断找到最优解(极值条件)? p38 无约束优化问题:通过莫干函数求导等于0,等式约束:通过拉格朗日参数法求无约束优化物理含义:课件上(暂无) 线性组合概念:课件上(暂无) 不等式约束的基本条件: 通过一个双次(?)变量转换成等式约束,再利用拉格朗日来求极值条件。导数的kt条件和kuhn-taker条件 p46 不等式的表达条件和物理含义: 三,一维搜索方法(计算题为主) (1)一维搜入优化方法:p59 (2)计算题(书上和课件上题型) 模拟计算机计算流程,把一两个迭代步,计算过程写出来 (3)黄金分割法的原理及迭代的步骤 (4)二次插值法算法推导及原理 四,无约束的优化方法(最重点) (1)最速下降法,牛顿法,共轭方向法,变尺度法(大概)p69-p83 (2)牛顿法和最速下降法的区别p70-p74 最速下降法的优点是算法简单,每次迭代计算量小,占用内存量小,且对初始点要求不高,即使从一个不好的初始点出发,往往也能收敛到局部极小点,但它有一个严重缺点就是收敛速度慢,特别是当椭圆比较扁平时,最速下降法的收敛速度越慢牛顿法收敛速度非常快,具有二次收敛的优点,但它存在下面四个严重的
机械优化设计复习总结
10. 1. 优化设计问题的求解方法:解析解法和数值近似解法。解析解法是指优化对象用数学方程(数学模型)描述,用数学解析 方法的求解方法。解析法的局限性:数学描述复杂,不便于或不可能用解析方法求解。数值解法:优化对象无法用数学 方程描述,只能通过大量的试验数据或拟合方法构造近似函数式,求其优化解;以数学原理为指导,通过试验逐步改进 得到优化解。数值解法可用于复 杂函数的优化解,也可用于没有数学解析表达式的优化问题。但不能把所有设计参数都 完全考虑并表达,只是一个近似的数学描述。数值解法的基本思路:先确定极小点所在的搜索区间,然后根据区间消去 原理不断缩小此区间,从而获得极小点的数值近似解。 2. 优化的数学模型包含的三个基本要素:设计变量、约束条件(等式约束和不等式约束)、目标函数(一般使得目标函 数达到极小值)。 3. 机械优化设计中, 两类设计方法:优化准则法和数学规划法。 k 1 k k 优化准则法:X c X (为一对角矩阵) k 1 数学规划法:X k 1 k k k X k d ( k d 分别为适当步长某一搜索方向一一数学规划法的核心) 4. 机械优化设计问题一般是非线性规划问题, 实质上是多元非线性函数的极小化问题。 的极值问题和不等式约束优化问题的极值条件。 5. 对于二元以上的函数,方向导数为某一方向的偏导数。 重点知识点:等式约束优化问题 f | X o *kCOS i d i 1 X i 函数沿某一方向的方向导数等于函数在该点处的梯度与这一方向单位向量的内积。 速上升方向),建议用 单位向量 表示,而梯度的模是函数变化率的最大值。 6. 梯度方向是函数值变化最快的方向 (最 7. 8. 9. 多元函数的泰勒展开。 f X f x 0 T f X o -X T G X o 2 f X o f X i f X 2 X , X 2 1 2 X1 X 2 2f 2f 为X 2 2 f X 1 X 2 X 1 2 f X 2 -- 2 X 2 海赛矩阵: x o 2 f ~2 X 1 2 f 2 f X l X 2 X 1 X 2 2 f 2 X 2 (对称方 阵) 极值条件是指目标函数取得极小值时极值点应满足的条件。 某点取得极值, 要条件:极值点必在驻点处取得。用函数的二阶倒数来检验驻点是否为极值点。 导数等于零时,判断开始不为零的导数阶数如果是偶次,则为极值点, 在此点函数的一阶导数为零, 极值点的必 二阶倒数大于零,取得极小值 。二阶 奇次 则为拐点。二元函数在某点取得极值的充 分条件是在该点岀的海赛矩阵正定。 极值点反映函数在某点附近的局部性质 凸集、凸函数、凸规划。 凸规划问题的任何局部最优解也就是全局最优点 中任意两点 的线段上的所有元素都包含在该集合内。 凸函数:连接凸集定义域内任意两点的线段上, 。凸集是指一个点集或一个区域内,连接其 性质: 凸集乘上某实数、两凸集相加、两凸集的交集仍是凸集。 函数值总小于或等于用任意两点函数值做线性内插所得的值。 数学表 达:f ax, 1 a x 2 f X i f X 2 0 1,若两式均去掉等号,则 f X 称作严格凸函数。凸 函数同样满足倍乘, 加法和倍乘加仍为凸函数的三条基本性质。 优化问题。 等式约束优化问题的极值条件。两种处理方法:消元法和拉格朗日乘子法。也分别称作降维法和升维法。消元法 等式约束条件的一个变量表示成另一个变量的函数。减少了变量的个数。拉格朗日乘子法是通过增加变量 约束优化问题变成无约束优化问题,增加了变量的个数。 不等式约束优化问题的极值条件。不等式约束的多元函数极值的必要条件为库恩塔克条件。库恩塔克条件: 凸规划针对目标函数和约束条件均为凸函数是的约束 :将 将等式
机械优化设计方法基本理论
机械优化设计方法基本理论 一、机械优化概述 机械优化设计是适应生产现代化要求发展起来的一门科学,它包括机械优化设计、机械零部件优化设计、机械结构参数和形状的优化设计等诸多内容。该领域的研究和应用进展非常迅速,并且取得了可观的经济效益,在科技发达国家已将优化设计列为科技人员的基本职业训练项目。随着科技的发展,现代化机械优化设计方法主要以数学规划为核心,以计算机为工具,向着多变量、多目标、高效率、高精度方向发展。]1[ 优化设计方法的分类优化设计的类别很多,从不同的角度出发,可以做出各种不同的分类。按目标函数的多少,可分为单目标优化设计方法和多目标优化设计方法按维数,可分为一维优化设计方法和多维优化设计方法按约束情况,可分为无约束优化设计方法和约束优化设计方法按寻优途径,可分为数值法、解析法、图解法、实验法和情况研究法按优化设计问题能否用数学模型表达,可分为能用数学模型表达的优化设计问题其寻优途径为数学方法,如数学规划法、最优控制法等 1.1 设计变量 设计变量是指在设计过程中进行选择并最终必须确定的各项独立参数,在优化过程中,这些参数就是自变量,一旦设计变量全部确定,设计方案也就完全确定了。设计变量的数目确定优化设计的维数,设计变量数目越多,设计空间的维数越大。优化设计工作越复杂,同时效益也越显著,因此在选择设计变量时。必须兼顾优化效果的显著性和优化过程的复杂性。 1.2 约束条件 约束条件是设计变量间或设计变量本身应该遵循的限制条件,按表达方式可分为等式约束和不等式约束。按性质分为性能约束和边界约束,按作用可分为起作用约束和不起作用约束。针对优化设计设计数学模型要素的不同情况,可将优化设计方法分类如下。约束条件的形式有显约束和隐约束两种,前者是对某个或某组设计变量的直接限制,后者则是对某个或某组变量的间接限制。等式约束对设计变量的约束严格,起着降低设计变量自由度的作用。优化设计的过程就是在设计变量的允许范围内,找出一组优化的设计变量值,使得目标函数达到最优值。
简述基于MATLAB的优化设计
基于MATLAB 的曲柄摇杆机构优化设计 1. 问题的提出 根据机械的用途和性能要求的不同,对连杆机构设计的要求是多种多样的,但这些设计要求可归纳为以下三种问题:(1)满足预定的运动规律要求;(2)满足预定的连杆位置要求;(3)满足预定的轨迹要求。在在第一个问题里按照期望函数设计的思想,要求曲柄摇杆机构的曲柄与摇杆转角之间按照()f φ?=(称为期望函数)的关系实现运动,由于机构的待定参数较少,故一般不能准确实现该期望函数,设实际的函数为()F φ?=(称为再现函数),而再现函数一般是与期望函数不一致的,因此在设计时应使机构再现函数()F φ?=尽可能逼近所要求的期望函数()f φ?=。这时需按机械优化设计方法来设计曲柄连杆,建立优化数学模型,研究并提出其优化求解算法,并应用于优化模型的求解,求解得到更优的设计参数。 2. 曲柄摇杆机构的设计 在图 1 所示的曲柄摇杆机构中,1l 、2l 、3l 、 4l 分别是曲柄AB 、连杆BC 、摇杆CD 和机架AD 的长度。这里规定0?为摇杆在右极限位置0φ时的曲柄起始位置角,它们由1l 、2l 、3l 和4l 确定。 图1 曲柄摇杆机构简图 设计时,可在给定最大和最小传动角的前提下,当曲柄从0?转到090??+时,要求摇杆的输出角最优地实现一个给定的运动规律()f ?。这里假设要求: ()()2 0023E f φ?φ??π ==+ - (1)
对于这样的设计问题,可以取机构的期望输出角()E f φ?=和实际输出角 ()F φ?=的平方误差之和作为目标函数,使得它的值达到最小。 2.1 设计变量的确定 决定机构尺寸的各杆长度1l 、2l 、3l 和4l ,以及当摇杆按已知运动规律开始运行时,曲柄所处的位置角0?应列为设计变量,即: []12340T x l l l l ?= (2) 考虑到机构的杆长按比例变化时,不会改变其运动规律,通常设定曲柄长度 1l =1.0,在这里可给定4l =5.0,其他杆长则按比例取为1l 的倍数。若取曲柄的初始 位置角为极位角,则?及相应的摇杆l 位置角φ均为杆长的函数,其关系式为: ()()()()222221243230124225arccos 210l l l l l l l l l l l l ?????++-+-+==????++???????? (3) ()()22222124323034325arccos 210l l l l l l l l l l ????? +--+--==???????????? (4) 因此,只有2l 、3l 为独立变量,则设计变量为[][]2312T T x l l x x ==。 2.2目标函数的建立 目标函数可根据已知的运动规律与机构实际运动规律之间的偏差最小为指标来建立,即: ()()2 1min m Ei i i f x φφ==-→∑ (5) 式中,Ei φ-期望输出角;m -输出角的等分数;i φ-实际输出角,由图 1 可知: ()()02i i i i i i i παβ?πφπαβπ?π--≤≤??=?-+≤≤?? (6) 式中,222222322132arccos arccos 22i i i i i r l l r x x rl r x α???? +-+-== ? ????? (7) 222241424arccos arccos 210i i i i i r l l r rl r β???? +-+== ? ????? (8) i r == (9) 2.3约束条件
30586机械优化设计考纲
高纲1513 江苏省高等教育自学考试大纲 30586 机械优化设计 南京理工大学编 江苏省高等教育自学考试委员会办公室 Ⅰ课程性质与课程目标 一、课程性质和特点 《机械优化设计》是高等工科院校中机械设计制造及其自动化专业现代设计方法模块的一门选修课程,它综合运用先修课程所学到的数学、计算机编程和机械等方面知识与理论,来解决机械工程领域内有关机构、机械零部件、机械结构及机械系统的优化设计问题及机械工程领域的其他优化问题。通过课程的学习可以培养学生运用现代设计理论与方法来更好地解决机械工程设计问题的能力。为进一步深入学习现代机械设计的理论与方法及更好地从事机械工程方面的设计、制造和管理等相关工作打下良好的基础。本课程的特点是数学基础理论与计算机编程语言与机械设计专业知识高度结合的综合课程。 二、课程目标 本门课程通过授课、练习和上机实践等教学环节,使学生树立机械优化设计的基本思想,了解机械优化设计的基本概念,初步掌握建立优化数学模型的基本方法和要求,了解和掌握一维搜索、无约束优化和约束优化中的一些基本算法及各种基本优化方法的特点和相关优化参数的选用原则,具有一定的编制和使用优化软件工具的能力,并具备一定的将机械工程问题转化为最优化问题并求解的应用能力。 三、与相关课程的联系与区别 本课程教学需要的先修课程:高等数学、理论力学、材料力学、机械原理、机械设计、机械制造装备设计、计算机编程语言。 本门课程要利用高等数学中有关偏导数、函数、极值、线性代数和矩阵等知识来
构建优化的方法;利用力学、机械设计和机械制造等方面的专业知识将工程问题转化成规范的优化设计数学模型,并利用计算机编程语言将优化方法和数学模型转化成可以执行的计算机程序,从而得到优化问题的解。因此,它既区别于基础的数学、力学课程和计算机编程语言课,又不同于机械设计和机械制造等机械专业课程,是利用数学方法和编程语言来解决机械工程设计问题的综合性课程。需要培养学生综合应用各选修课程知识解决工程设计问题的能力。 四、课程的重点和难点 本课程的重点内容:机械优化设计的基本概念、一维搜索优化方法、基本的无约束优化方法和约束优化方法。 本课程的次重点内容:机械优化数学模型建立方法和原则、优化设计的数学基础、线性规划方法、多目标和离散变量的优化方法。 本课程的的难点内容:约束优化方法、优化方法在机械工程设计中的实际应用。 Ⅱ考核目标 本大纲在考核目标中,按照识记、领会和应用三个层次规定其应达到的能力层次要求。三个能力层次是递升的关系,后者必须建立在前者的基础上。各能力层次的含义是: 识记(Ⅰ):要求考生能够识别和记忆本课程中有关优化设计数学模型和各种基本优化方法基本概念、基本原理、算法特点、算法步骤等主要内容并能够根据考核的不同要求,做正确的表述、选择和判断。 领会(Ⅱ):要求考生能够领悟和理解本课程中有关优化问题数学建模、求解及各种基本优化方法的概念及原理的内涵及外延,理解各种优化方法的数学基础和求解步骤的确切含义,掌握每种方法的适用条件和优化参数选用原则;理解相关知识的区别和联系,做出正确的判断、解释和说明。 应用(Ⅲ):要求考生能够根据所学的方法,对简单的优化问题求解,得出正确的结论或做出正确的判断。能够针对具体、实际的工程情况发现问题,并能探究解决问题的方法,建立合理的数学模型,用所学的优化方法进行求解,并学会编程或利用现有优化软件求解优化问题。 Ⅲ课程内容与考核要求 绪论 一、学习目的与要求 了解机械优化设计的特点、发展概况以及本课程的主要内容。 二、课程内容 传统设计和优化设计的特点和区别,机械优化设计发展概况及本课程的主要内容。 三、考核知识点与考核要求 1. 传统设计和优化设计 识记:传统设计特点,传统设计流程; 领会:优化设计特点,现代设计流程。 2. 机械优化设计发展概况
机械优化设计习题及答案
机械优化设计习题及参考答案 1-1.简述优化设计问题数学模型的表达形式。 答:优化问题的数学模型是实际优化设计问题的数学抽象。在明确设计变量、约束条件、目标函数之后,优化设计问题就可以表示成一般数学形式。求设计变量向量[]12T n x x x x =L 使 ()min f x → 且满足约束条件 ()0 (1,2,)k h x k l ==L ()0 (1,2,)j g x j m ≤=L 2-1.何谓函数的梯度?梯度对优化设计有何意义? 答:二元函数f(x 1,x 2)在x 0点处的方向导数的表达式可以改写成下面的形式:??? ?????????????=??+??= ??2cos 1cos 212cos 21cos 1θθθθxo x f x f xo x f xo x f xo d f ρ 令xo T x f x f x f x f x f ?? ????????=????=?21]21[)0(, 则称它为函数f (x 1,x 2)在x 0点处的梯度。 (1)梯度方向是函数值变化最快方向,梯度模是函数变化率的最大值。 (2)梯度与切线方向d 垂直,从而推得梯度方向为等值面的法线方向。梯度)0(x f ?方向为函数变化率最大方向,也就是最速上升方向。负梯度-)0(x f ?方向为函数变化率最小方向,即最速下降方向。 2-2.求二元函数f (x 1,x 2)=2x 12+x 22-2x 1+x 2在T x ]0,0[0=处函数变化率最 大的方向和数值。 解:由于函数变化率最大的方向就是梯度的方向,这里用单位向量p 表示,函数变化率最大和数值时梯度的模)0(x f ?。求f (x1,x2)在
MATLAB基础及应用论文
题目 : MATLAB 语言多项式计算的分析与概述 摘要 :数值计算在科学研究与工程应用中有着十分广泛的应用,MATLAB 向我们提供 了标准的多项式的常用函数,包括求根、相乘、相除等。这些功能在进行现代数字信号处理与分析时非常有用。本文主要通过示例的形式分析与概述MATLAB 多项式计算的基本内容。 关键词 : 多项式 ;运算 ; 函数 ; 拟合 ; MATLAB 。 一、 引言 : MATLAB 是由MATH WORKS 公司推出的一种面向科学与工程的计算软件。 如今MATLAB 语言发展速度非常快,涉及十分广阔,本文主要讨论MATLAB 多项式的计 算,可谓MATLAB 的冰山一角。读者若要了解MATLAB 语言的更多知识还应多读多看他人著作。 二、 多项式计算 : 1,多项式的创建方法 : 在MATLAB 里:多项式由一个行向量表示,它的系数是按降序排列。 例如: 由1×N 的向量 表示 多项式,如用poly2sym()可以查看这个多项式。 (1)直接输入法 在MATLAB 命令窗口中直接输入多项式的系数矢量,然后利用转换函数poly2sym 将多项式由系数矢量形式转换为符号新式。 (2)指令P=poly(AR)法 若AR 是方阵,多项式P 是该方阵的特征多项式 若AR=[a 1, a 2,…,a n-1,a n ],则AR 的元素认为是多项式P 的根 如果A 为二维矩阵, poly(A)给出A 的特征多项式。如果A 为一维矩阵, poly(A)表示由A 的元素为多项式的根所确定的多项式。 【例1】产生多项式的方法。 clear %方法一(由多项式的系数确定的多项式) p=[1 -2 3]%直接给出多项式p poly2sym(p)%给出p 多项式的表达式 %方法二(由矩阵所确定的多项式) a=[1 2;-2 4] ] ..[210n a a a a p =n n n n n a x a x a x a P ++++=-- (22110)
机械优化设计MATLAB程序
t t t 机械优化设计作业 1.用二次插值法求函数?( )= ( +1)( - 2)2 极小值,精度 e=0.01。 在 MA TLAB 的 M 文件编辑器中编写的 M 文件,如下: f=inline('(t+1)*(t -2)^2','t') a=0;b=3;epsilon=0.01; t1=a;f1=f(t1); t3=b;f3=f(t3); t2=0.5*(t1+t3);f2=f(t2); c1=(f3-f1)/(t3-t1); c2=((f2-f1)/(t2-t1)-c1)/(t2-t3); t4=0.5*(t1+t3-c1/c2);f4=f(t4); k=0; while(abs(t4-t2)>=epsilon) if t2f4 f1=f2;t1=t2; t2=t4;f2=f4; else f3=f4;t3=t4; end else if f2>f4 f3=f2;t3=t2; t2=t4;f2=f4; else f1=f4;t2=t4; end end c1=(f3-f1)/(t3-t1); c2=((f2-f1)/(t2-t1)-c1)/(t2-t3); t4=0.5*(t1+t3-c1/c2);f4=f(t4); k=k+1; end %输出最优解 if f2>f4 t=t4;f=f(t4); else t=t2;f=f(t2); end fprintf(1,'迭代计算 k=%3.0f\n',k) fprintf(1,'极小点坐标 t=%3.0f\n',t) fprintf(1,'函数值 f=%3.4f\n',f)
3.用牛顿法、阻尼牛顿法及变尺度法求函数 的极小点。( ) ( ) ( )21121 22, xxxxxf -+-= 4 2 (1)在用牛顿法在 MATLAB 的 M 文件编辑器中编写的 M 文件,如下: function [x,fx,k]=niudunfa(x0) syms x1 x2 f=(x1-2)^4+(x1-2*x2)^2; fx=0; v=[x1,x2]; df=jacobian(f,v); df=df.'; G=jacobian(df,v); epson=1e -12; g1=subs(df,{x1,x2},{x0(1,1),x0(2,1)}); G1=subs(G,{x1,x2},{x0(1,1),x0(2,1)}); k=0; p=-G1\g1; x0=x0+p; while(norm(g1)>epson) p=-G1\g1; x0=x0+p; g1=subs(df,{x1,x2},{x0(1,1),x0(2,1)}); G1=subs(G,{x1,x2},{x0(1,1),x0(2,1)}); k=k+1; end x=x0; fx=subs(f,{x1,x2},{x(1,1),x(2,1)}); 运行结果如下: >> [x,fx,k]=niudunfa([1;1]) x =1.9999554476059523381489991377897 0.99997772380297616907449956889483 fx =0.0000000000000000039398907941382470301534502947647 k =23 (2)用阻尼牛顿法在 MA TLAB 的 M 文件编辑器中编写的 M 文件,如下: function [x,fx,k]=zuniniudunfa(x0)%阻尼牛顿法 syms x1 x2 f=(x1-2)^4+(x1-2*x2)^2; fx=0; v=[x1,x2]; df=jacobian(f,v); df=df.'; G=jacobian(df,v); epson=1e -12;%停机原则
机械优化设计大作业
一、问题描述 1.1结构特点 (1)体积小、重量轻、结构紧凑、传递功率大、承载能力高 ; (2)传动效率高,工作高 ;(3)传动比大。 1.2用途和使用条件 某行星齿轮减速器主要用于石油钻采设备的减速,其高速轴转速为1300r/min ;工作环境温度为-20℃~60℃,可正、反两向运转。 按该减速器最小体积准则,确定行星减速器的主要参数。 二、分析 传动比u=4.64,输入扭矩T=1175.4N.m ,齿轮材料均选用38SiMnMo 钢,表面淬火硬度HRC 45~55,行星轮个数为3。要求传动比相对误差02.0≤?u 。 弹性影响系数Z E =189.8MPa 1/2;载荷系数k=1.05;齿轮接触疲劳强度极限[σ]H =1250MPa ;齿轮弯曲疲劳强度极限[σ]F =1000MPa ;齿轮的齿形系数Y Fa =2.97;应力校正系数Y Sa =1.52;小齿轮齿数z 取
值范围17--25;模数m取值范围2—6。 注:优化目标为太阳轮齿数、齿宽和模数,初始点[24,52,5]T 三、数学建模 建立数学模型见图1,即用数学语言来描述最优化问题,模型中的数学关系式反映了最优化问题所要达到的目标和各种约束条件。 3.1设计变量的确定 影响行星齿轮减速器体积的独立参数为中心轮齿数、齿宽、模数及行星齿轮的个数,将他们列为设计变量,即: x=[x 1 x 2 x 3 x 4 ]T=[z 1 b m c]T [1] 式中:z1 ˉ ̄太阳轮齿数;b―齿宽(mm);m—模数(mm);行星轮的个数。通常情况下,行星轮个数根据机构类型以事先选定,由已知条件c=3。这样,设计变量为: x=[x 1 x 2 x 3 ]T=[z 1 b m]T [1] 3.2目标函数的确定 为了方便,行星齿轮减速器的重量可取太阳轮和3个行星轮体积之和来代替,即: V=π/4(d 12+Cd 2 2)b 式中:d1--太阳轮1的分度圆直径,mm;d2--行星轮2的分度圆直径,mm。 将d 1=mz 1, d 2 =mz 2 ,z 2 =z 1 (u-2)/2代入(3)式整理,目标函 数则为: