变频器在分条整经机上的应用
1 前言
分条整经机主要用于精纺毛、化纤长丝、真丝织物及特种产业用品、是剑杆、片校、喷气、喷水等无梭织机的织前准备设备。主要由筒子纱架、整经滚筒和倒轴卷绕三大部分组成。整经调速范围10~1000m/min,倒轴调速范围10~300 m/min,走车量(导条位
移)0.001~9.999mm,倒轴张力误差≤±2%,要求恒张力卷绕。
分条整经机主要是将筒纱按工艺要求排列到筒子纱架上,经张力器、分绞筘、定幅筘、压纱辊顺序卷绕到整经滚筒上,再由倒轴机按一定的张力卷绕到经轴上,整个加工过程基本是在恒张力下进行的,属于恒转矩负载。
该机滚筒主传动为15kw的交流变频电动机传动。织轴、整经台的横移以及整径台的前后移动分别由单独的交流伺服电机或步进传动,倒轴电动机为10kW,变频专用电动机。
全机的控制采用Profibus-DP现场总线控制系统,DP现场总线是一种开放的、串行的、全数字化的、双向多变量通信的数据总线。
2 控制系统
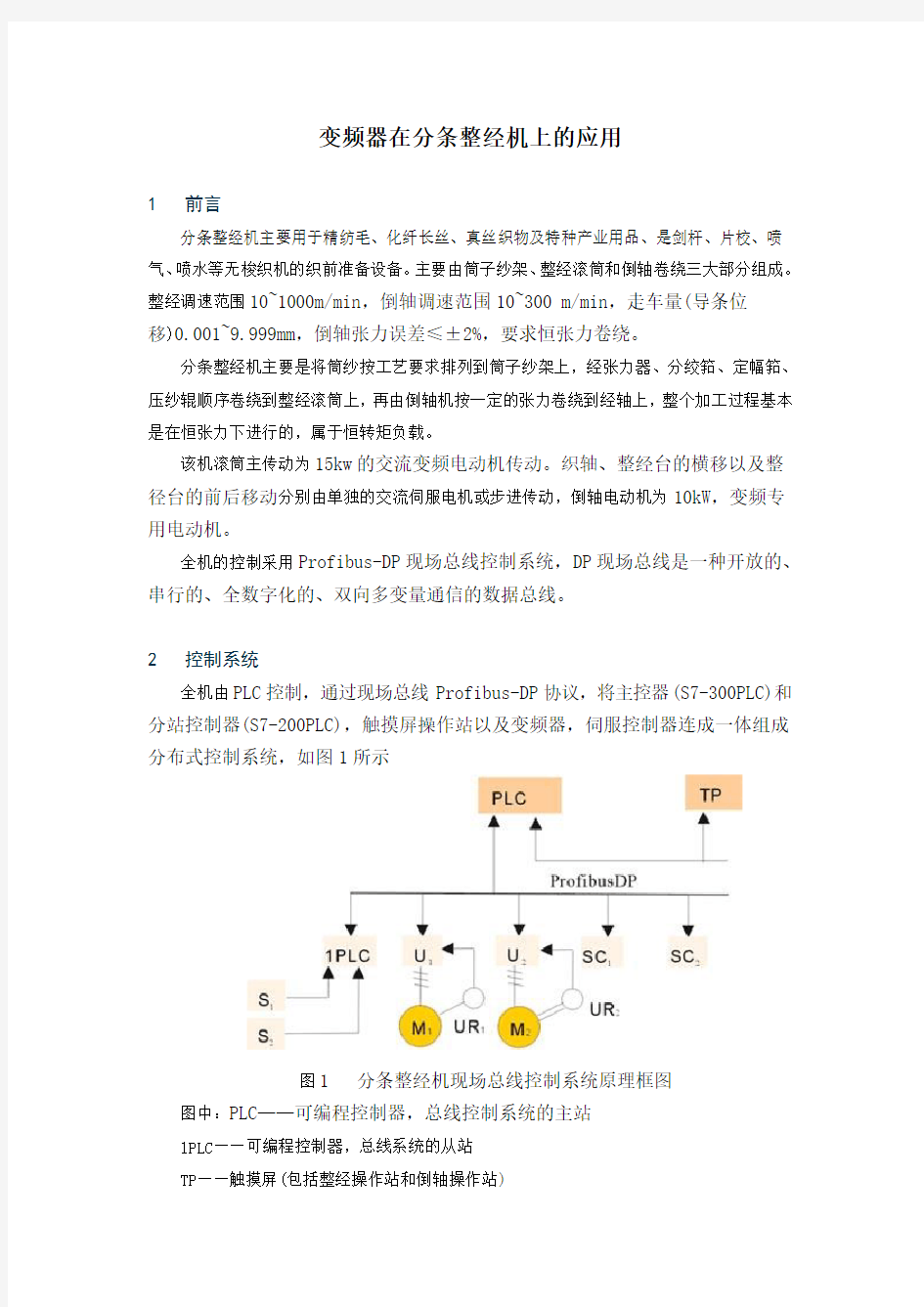
全机由PLC控制,通过现场总线Profibus-DP协议,将主控器(S7-300PLC)和分站控制器(S7-200PLC),触摸屏操作站以及变频器,伺服控制器连成一体组成分布式控制系统,如图1所示
图1 分条整经机现场总线控制系统原理框图图中:PLC——可编程控制器,总线控制系统的主站
1PLC——可编程控制器,总线系统的从站
TP——触摸屏(包括整经操作站和倒轴操作站)
U1、U2——分别为织轴,倒轴变频器
S1——张力传感器
S2——计长传感器
SC1、SC2——整经台横移和前后移伺服电机控制器
UR1,UR2——编码器
本系统主控器选用S7—300型PLC(S7-315-2DP型)它内置MPI口和DP通信口。MPI是集成在两门子PLC上的通信口,用于建立小型通信网络,采用多点接口MPI 协议,是一种少数站点间的通信的总线型网络,常用于连接上位机和少量PLC
之间的近距离通信,最多可接32个节点,数据长度为64个字节,最大传输距离为100m。
MPI允许主/主通信和主/从通信。S7-300/400CPU作为网络的主站,S7-200CPU 是从站S7-300/400可用XGET/XPUT指令来读写S7-200的数据。
Profibus-DP是一种高速数据通信网络,适用于加工制造业自动化,其传输速率为
9.6~12kb/s,传输距离为0.1~1.2km,传输介质通常采用屏蔽双绞线。本机采用的现场总线控制系统是以PLC作为主站,完成总线通信管理,从站即变频器数据(输出频率、电流、电压等)的读写以及参数化等工作。2台变频器和伺服控制器均为从站,其间采用半双工双向通信、从站只有在收到主站的读写命令后才发送数据。
变频器、PLC和触摸屏构成的控制系统在进行通信之前必须对上述设备的通信参数如波特率,通信格式等进行设置,也就是进行通信初始化设置,使变频器、PLC和触摸屏的通信波特率、通信格式等相互对应保持一致。
PLC的主要功能
(1)作为总线主站完成总线通信管理;
(2)控制两台变频器的运行即整经滚筒和倒轴电动机的运行速度及变化;
(3)控制两台伺服电动机的运行即整经台的横移和前后移导条的位移;
(4)运算功能即对张力传感器输入的数据进行运算处理后控制织轴电动机的速度,完成张力的控制,对计长传感器输入信号进行运算处理实现计长;
(5)与整经和倒轴触摸屏通信完成全机的起动、停止等操作。
触摸屏的主要功能
一台触摸屏作为整经操作站,另一台触摸屏用作倒轴操作站,主要用于整经或倒轴电动机的起动、停止等操作;设定、修改工艺参数以及显示全机运行状态等,该触摸屏设置有主
画面,参数设置画面,运行控制画面,生产数据统计画面和故障监视画面等,各画面的主要功能为:
主画面是让用户直接了解整经或倒轴的运行状况和工艺参数、主画面设有工艺参数和状况监控区以及换页区、监控的参数主要有整经或倒轴的速度、经长、匹长、导条位移、张力,等换页区是用于各页面的切换,用户可根据需要直接切换到所需的页面进行监控。
参数设置画面是用于设置工艺参数,例如在整经时设置的参数有经长、匹长、条数、条宽、导条位移量,压辊压力等。在倒轴时设置的参数有倒轴速度、纱线张力,左右移及收紧等,数值,工艺参数直接影响到加工产品质量,设定的参数不得随意修改,因此,工艺参数设置时,必须先输入密码,只有当密码正确时方可进入参数设置或修改,必要时密码也可随时变更。
运行控制画面是用于选择工作状态例如整经或倒轴,并进行起动、停止操作和调节到设定的工艺速度运行,还可显示当前的运行速度,整经台的位移等参数,也就是对分条整经机的运行进行操作和监视。
生产数据统计画面可显示并储存各班次当日或当月的产量、辅料消耗、运行生产效率和开、停机时间等。
故障监视画面主要是当遇有故障时,将自动切换到故障监视画面并可按照停机时间或停机次数从大到小顺序显示各班次的故障统计。
3 导条位移控制
本机采用伺服电动机驱动上下丝杠螺母机构来实现导条位移。下丝杠传动使机身相对地轨作左右运动,上丝杠传动使整经操作台沿滚珠导轨作左右运动;在整经时机身和整经台两者的移动保持同步并作同向运动,使整经台与筒子架中心保持在一条中心线上,如图2所示。
制系统,该系统成本较低,更经济。至于现场总线控制系统能否在分条整理机上推广应用,有待于总线系统硬件成本的降低。
变频器的运转指令方式 变频器的运转指令方式是指如何控制变频器的基本运行功能,这些功能包括启动、停止、正转与反转、正向电动与反向点动、复位等。 与变频器的频率给定方式一样,变频器的运转指令方式也有操作器键盘控制、端子控制和通讯控制三种。这些运转指令方式必须按照实际的需要进行选择设置,同时也可以根据功能进行相互之间的方式切换。 1操作器键盘控制 操作器键盘控制是变频器最简单的运转指令方式,用户可以通过变频器的操作器键盘上的运行键、停止键、点动键和复位键来直接控制变频器的运转。 操作器键盘控制的最大特点就是方便实用,同时又能起到报警故障功能,即能够将变频器是否运行或故障或报警都能告知给用户,因此用户无须配线就能真正了解到变频器是否确实在运行中、是否在报警(过载、超温、堵转等)以及通过led数码和lcd液晶显示故障类型。 按照前面一节的内容,变频器的操作器键盘通常可以通过延长线放置在用户容易操作的5m以内的空间里。同理,距离较远时则必须使用远程操作器键盘。 在操作器键盘控制下,变频器的正转和反转可以通过正反转键切换和选择。如果键盘定义的正转方向与实际电动机的正转方向(或设备的前行方向)相反时,可以通过修改相关的参数来更正,如有些变频器参数定义是“正转有效”或“反转有效”,有些变频器参数定义则是“与命令方向相同”或“与命令方向相反”。 对于某些生产设备是不允许反转的,如泵类负载,变频器则专门设置了禁止电动机反转的功能参数。该功能对端子控制、通讯控制都有效。 2端子控制 2.1基本概念 端子控制是变频器的运转指令通过其外接输入端子从外部输入开关信号(或电平信号)来进行控制的方式。 这时这些由按钮、选择开关、继电器、plc或dcs的继电器模块就替代了操作器键盘上的运行键、停止键、点动键和复位键,可以在远距离来控制变频器的运转。
一、变频器的控制异步电动机的基本原理: 1、异步电动机的结构: 定子 转子:绕线式鼠笼式 2、异步电动机旋转 (1)旋转磁场 在异步电动机的三相对称绕组通入三相对称电流后,它们共同的作用产生合成旋转磁场。 旋转磁场的转速(同步转速) 60f1(I频) n= (转/分) p- 相对数 (2)异步电动机的转速 三个电磁现象: 1、带电体周围产生磁场 2、导体在磁场中运动产生感应年电动势 3、带电导体在磁场中产生电磁力 no-n = s 转差率 no 60f1 异步电动机转速n = ( r/s) p 如no=n则转子不切割磁力线也就丢失了旋转运动。 4、异步电动机的调试方法 (1)变极调速 (2)改变转差率(s)——如滑差电机 (3)变频调速 变频器本质: 是一种输出电压和频率可以改变的电源。 二、变频器的基础知识 1、发展史与展望 电压与频率成正比的实现方法:PWM 但存在高次谐波:电机发热 干扰 电机振动 2、变频器的结构与原理
U V 等效电流 1、整流电路:整流成直流脉动电压 2、限流电路:由限流电阻及短路触点组成限止充电电流,保护整流器件。 3、滤波电路:平滑电压 4、制动电路:60f1 30秒n0= P 5秒 00 n>n0 发电机 作用:吸收原生电压,保护功率模块,增大制动转矩,使电动机快速停止。 5、逆变电路: 等效交流电:效果上是正弦波 实质上是PWM波 住回路容易坏(大多是驱动电路坏造成的) 3、变频器控制方式: U/f(国产)转差频率(在国内无)矢量(最先进、最好的) ①u/f 控制方式 忽略定子漏电阻 E=U=4.4f1w1k1¢m 设U不变
变频器矢量控制的基本原理分析 矢量控制的基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对异步电动机的励磁电流和转矩电流进行控制,从而达到控制异步电动机转矩的目的。具体是将异步电动机的定子电流矢量分解为产生磁场的电流分量(励磁电流)和产生转矩的电流分量(转矩电流)分别加以控制,并同时控制两分量间的幅值和相位,即控制定子电流矢量,所以称这种控制方式称为矢量控制方式。矢量控制方式又有基于转差频率控制的矢量控制方式、无速度传感器矢量控制方式和有速度传感器的矢量控制方式等。基于转差频率控制的矢量控制方式同样是在进行U/f=恒定控制的基础上,通过检测异步电动机的实际速度n,并得到对应的控制频率f,然后根据希望得到的转矩,分别控制定子电流矢量及两个分量间的相位,对通用变频器的输出频率f进行控制的。基于转差频率控制的矢量控制方式的最大特点是,可以消除动态过程中转矩电流的波动,从而提高了通用变频器的动态性能。早期的矢量控制通用变频器基本上都是采用的基于转差频率控制的矢量控制方式。 无速度传感器的矢量控制方式是基于磁场定向控制理论发展而来的。实现精确的磁场定向矢量控制需要在异步电动机内安装磁通检测装置,要在异步电动机内安装磁通检测装置是很困难的,但人们发现,即使不在异步电动机中直接安装磁通检测装置,也可以在通用变频器内部得到与磁通相应的量,并由此得到了所谓的无速度传感器的矢量控制方式。它的基本控制思想是根据输入的电动机的铭牌参数,按照一定的关系式分别对作为基本控制量的励磁电流(或者磁通)和转矩电流进行检测,并通过控制电动机定子绕组上的电压的频率使励磁电流(或者磁通)和转矩电流的指令值和检测值达到一致,并输出转矩,从而实现矢量控制。
PWM型变频器的基本控制方式 通用的PWM型变频器是一种交—直—交变频,通过整流器将工频交流电整流成直流电,经过中间环节再由逆变器将直流电逆变成频率可调的交流电,供给交流负载。异步电动机调速时,供电电源不但频率可变,而且电压大小也必须能随频率变化,即保持压频比基本恒定。 PWM型变频器一般采用电压型逆变器。根据供给逆变器的直流电压是可变的还是恒定的,变频器可分成两种基本控制方式。 (1)变幅PWM型变频器这是一种对变频器输出电压和频率分别进行调节的控制方式,其基本电路如图3-3所示。中间环节是滤波电容器。 图2-3 变幅PWM型变频器 晶闸管整流器用来调压,与一般晶闸管调压系统一样,采用相位控制,通过改变触发脉冲的延迟角α来获得与逆变器输出频率相对应的不同大小的直流电压。逆变器只作输出频率控制,它一般是由6个开关器件组成,按脉冲调制方式进行控制。 图3-4所示是另一种直流电压可调的PWM变频电路。它采用二极管不可控整流桥,把三相交流电变换为恒定的直流电。分立斩波器电路,来改变输出直流电压的大小,通过逆变器输出三相交流电。 图2-4 利用斩波器的变频电路图 以上两种调压式变频电路,都需要两极可控功率级,相比较,采用晶闸管整流桥可以获得更大功率的直流电,由于可控整流桥采用相位控制,输入功率因数将随输出直流电压的减小而降低;而斩波式调压,输入功率变流级采用的是二级管整流桥,所以输入端有很高的功率因数,代价是多了一个斩波器。另外,就动态响应的快速性来说后者比前者好。 (2)恒幅PWM型变频器
恒幅脉宽调制PWM式变频电路如图3.3所示,它由二极管整流桥,滤波电容和逆变器组成。逆变器的输入为恒定不变的直流电压,通过调节逆变器的脉冲宽度和输出交流电压的频率,既实现调压又实现调频,变频变压都是由逆变器承担。此系统是目前使用较普遍的一种变频系统,其主电路简单,只要配上简单的控制电路即可。它具有下列主要优点: 1)简化了主电路和控制电路的结构。由二极管整流器对逆变器提供恒定的直流电压。在PWM逆变器内,在变频的同时控制其输出电压。系统只有一个控制功率级,从而使装置的体积小,重量轻,造价低,可靠性好。 2)由二极管整流器代替晶闸管整流器,提高了装置的功率因数。 3)改善系统的动态性能。PWM型逆变器的输出功率和电压,都在逆变器内控制和调节。因此,调节速度快,调节过程中频率和电压配合好,系统动态性能好。 4)对负载有较好的供电波形。PWM型逆变器的输出电压和电流波形接近正弦波,从而解决了由于以矩形波供电引起的电动机发热和转矩降低问题,改善了电动机运行性能。 图2-5 PWM型逆变器 但PWM型逆变器也有如下缺点: 1)在调制频率和输出频率之比固定的情况下,特别是在低频时,高次谐波影响较大,因而电动机的转矩脉动和噪声都较大。 2)在调制频率和输出频率之比作有级变化的情况下,往往使控制电路比较复杂。 3)器件的工作频率与调制频率有关。有些器件的开关损耗和换相电路损耗较大,而且需要采用导通和关断时间短的高速开关器件。 2.2.2 PWM型逆变器的基本工作原理
变频器的控制方式 1 引言 我们通常意义上讲的低压变频器,其输出电压一般为220~650v、输出功率为0.2~400kw、工作频率为0~800hz左右,变频器的主电路采用交-直-交电路。根据不同的变频控制理论,其模式主要有以下三种: (1)v/f=c的正弦脉宽调制模式 (2)矢量控制(vc)模式 (3)直接转矩控制(dtc)模式 针对以上三种控制模式理论,可以发展为几种不同的变频器控制方式,即v/f控制方式(包括开环v/f控制和闭环v/f控制)、无速度传感器矢量控制方式(矢量控制vc的一种)、闭环矢量控制方式(即有速度传感器矢量控制vc 的一种)、转矩控制方式(矢量控制vc或直接转矩控制dtc)等。这些控制方式在变频器通电运行前必须首先设置。 2 v/f控制方式 2.1 基本概念 我们知道,变频器v/f控制的基本思想是u/f=c,因此定义在频率为fx时,ux的表达式为ux/fx=c,其中c为常数,就是“压频比系数”。图1中所示就是变频器的基本运行v/f曲线。 由图1可以看出,当电动机的运行频率高于一定值时,变频器的输出电压不再能随频率的上升而上升,我们就将该特定值称之为基本运行频率,用fb 表示。也就是说,基本运行频率是指变频器输出最高电压时对应的最小频率。在通常情况下,基本运行频率是电动机的额定频率,如电动机铭牌上标识的50hz或 60hz。同时与基本运行频率对应的变频器输出电压称之为最大输出电压,用vmax表示。
当电动机的运行频率超过基本运行频率fb后,u/f不再是一个常数,而是随着输出频率的上升而减少,电动机磁通也因此减少,变成“弱磁调速”状态。 基本运行频率是决定变频器的逆变波形占空比的一个设置参数,当设定该值后,变频器cpu将基本运行频率值和运行频率进行运算后,调整变频器输出波形的占空比来达到调整输出电压的目的。因此,在一般情况下,不要随意改变基本运行频率的参数设置,如确有必要,一定要根据电动机的参数特性来适当设值,否则,容易造成变频器过热、过流等现象。 2.2 预定义的v/f曲线和用户自定义v/f曲线 由于电动机负载的多样性和不确定性,因此很多变频器厂商都推出了预定义的v/f曲线和用户自定义的任意v/f曲线。 预定义的v/f曲线是指变频器内部已经为用户定义的各种不同类型的曲线。如艾默生ev2000变频器有三种特定曲线(图2a),曲线1为2.0 次幂降转矩特性、曲线2为1.7次幂降转矩特性、曲线为1.2次幂降转矩特性。罗克韦尔 ab powerflex 400变频器有4种定义的曲线(如图 2b),其定义的方式是在电动机额定频率一半(即50%fn)时的输出电压是电动机额定电压的30%时(即30%vn)为曲线1,35%vn为曲线 2,40%vn为曲线3,vn为曲线4。这些预定义的v/f曲线非常适合在可变转矩(如典型的风机和泵类负载)中使用,用户可以根据负载特性进行调整,以达到最优的节能效果。 对于其他特殊的负载,如同步电动机,则可以通过设置用户自定义v/ f 曲线的几个参数,来得到任意v/ f曲线,从而可以适应这些负载的特殊要求和特定功能。自定义v/ f曲线一般都通过折线设定,典型的有三段折线和两段折线。
西门子标准变频器控制方法描述
第一节速度矢量控制(MM440) 在矢量控制中,速度控制器影响系统的动态特性。特别是恒转矩负载,速度闭环控制有利于改善系统的运动精度和跟随性能。在矢量控制过程中,速度控制器的配置是重要的环节。 根据速度控制器的反馈信号来源,可以将速度矢量控制分为带传感器的矢量控制(VC)与无传感器的矢量控制(SLVC)两种。 ?编码器的反馈信号(VC):P1300=20 ?观测器模型的反馈信号(SLVC):P1300=21 在快速调试和电机参数优化的过程中,变频器会根据负载参数自动辨识系统模型,建立模型观测器,在没有传感器的情况下,系统也会根据输出电流来计算当前速度,作为速度反馈来构成速度闭环。 速度控制器的设定方式(P1460,P1462,P1470,P1472) ?手动调节 可根据经验对速度控制器的比例与积分参数进行整定 ?PID自整定 设定参数:P1400 当P1400.0=1,使能速度控制器的增益自适应功能,即根据系统偏差的 大小来自动调节比例增益系数Kp。在弱磁区,增益系数随磁通的降低 而减小。 当P1400.1=1,速度控制器的积分被冻结,只有比例增益,即对开环运 行的电动机加上滑差补偿。 ?优化方式自整定 通过设置P1960=1,变频器会自动对速度控制器的各参数进行整定。
第二节 转矩控制(MM440) 矢量控制分为速度矢量控制与转矩矢量控制,转矩控制与速度矢量控制的主设定频率 滤波 编码器反馈 观测器模型反 馈实际频率 滤波 PI 速度 控制器 系统 手动调节 自整定 优化整定 P1400.0=1 P1960=1
在工业自动化控制系统中,最为常见的是PLC和变频器的组合应用,并且产生了多种多样的PLC控制变频器的方法,其中采用RS-485通讯方式实施控制的方案得到广泛的应用:因为它抗干扰能力强、传输速率高、传输距离远且造价低廉。但是,RS-485的通讯必须解决数据编码、求取校验和、成帧、发送数据、接收数据的奇偶校验、超时处理和出错重发等一系列技术问题,一条简单的变频器操作指令,有时要编写数十条PLC梯形图指令才能实现,编程工作量大而且繁琐,令设计者望而生畏。? 本文介绍一种非常简便的三菱FX系列PLC通讯方式控制变频器的方法:它只需在PLC主机上安装一块RS-485通讯板或挂接一块RS-485通讯模块;在PLC的面板下嵌入一块造价仅仅数百元的“功能扩展存储盒”,编写4条极其简单的PLC梯形图指令,即可实现8台变频器参数的读取、写入、各种运行的监视和控制,通讯距离可达50m或500m。这种方法非常简捷便利,极易掌握。本文以三菱产品为范例,将这种“采用扩展存储器通讯控制变频器”的简便方法作一简单介绍。 2、三菱PLC采用扩展存储器通讯控制变频器的系统配置 2.1 系统硬件组成 FX2N系列PLC(产品版本V 3.00以上)1台(软件采用FX-PCS/WIN-C V 3.00版); FX2N-485-BD通讯模板1块(最长通讯距离50m); 或FX0N-485ADP通讯模块1块+FX2N-CNV-BD板1块(最长通讯距离500m); FX2N-ROM-E1功能扩展存储盒1块(安装在PLC本体内);
带RS485通讯口的三菱变频器8台(S500系列、E500系列、F500系列、F700系列、A500系列、V500系列等,可以相互混用,总数量不超过8台;三菱所有系列变频器的通讯参数编号、命令代码和数据代码相同。); RJ45电缆(5芯带屏蔽); 终端阻抗器(终端电阻)100Ω; 选件:人机界面(如F930GOT等小型触摸屏)1台。 2.2 硬件安装方法 (1) 用网线专用压接钳将电缆的一头和RJ45水晶头进行压接;另一头则按图1~图3的方法连接FX2N-485-BD通讯模板,未使用的2个P5S端头不接。 (2) 揭开PLC主机左边的面板盖, 将FX2N-485-BD通讯模板和FX2N-ROM-E1功能扩展存储器安装后盖上面板。 (3) 将RJ45电缆分别连接变频器的PU口,网络末端变频器的接受信号端RDA、RDB之间连接一只100Ω终端电阻,以消除由于信号传送速度、传递距离等原因,有可能受到反射的影响而造成的通讯障碍。 2.3 变频器通讯参数设置 为了正确地建立通讯,必须在变频器设置与通讯有关的参数如“站号”、“通讯速率”、“停止位长/字长”、“奇偶校验”等等。变频器内的Pr.117~Pr.124参数用于设置通讯参数。参数设定采用操作面板或变频器设置软件FR-SW1-SETUP-WE在PU口进行。 2.4 变频器设定项目和指令代码举例
变频器中常用的控制方式 1, 非智能控制方式 在交流变频器中使用的非智能控制方式有V/f协调控制、转差频率控制、矢量控制、直 接转矩控制等。 ⑴V/f 控制 V/f控制是为了得到理想的转矩-速度特性,基于在改变电源频率进行调速的同时,又要保证电动机的磁通不变的思想而提出的,通用型变频器基本上都采用这种控制方式。V/f 控制变频器结构非常简单,但是这种变频器采用开环控制方式,不能达到较高的控制性能,而且,在低频时,必须进行转矩补偿,以改变低频转矩特性。 (2) 转差频率控制 转差频率控制是一种直接控制转矩的控制方式,它是在V/f控制的基础上,按照知道异 步电动机的实际转速对应的电源频率,并根据希望得到的转矩来调节变频器的输出频率,就可以使电动机具有对应的输出转矩。这种控制方式,在控制系统中需要安装速度传感器,有时还加有电流反馈,对频率和电流进行控制,因此,这是一种闭环控制方式,可以使变频器 具有良好的稳定性,并对急速的加减速和负载变动有良好的响应特性。 (3) 矢量控制 矢量控制是通过矢量坐标电路控制电动机定子电流的大小和相位,以达到对电动机在 d、q、0坐标轴系中的励磁电流和转矩电流分别进行控制,进而达到控制电动机转矩的目的。 通过控制各矢量的作用顺序和时间以及零矢量的作用时间,又可以形成各种PWM波,达到各 种不同的控制目的。例如形成开关次数最少的PWM波以减少开关损耗。目前在变频器中实际应用的矢量控制方式主要有基于转差频率控制的矢量控制方式和无速度传感器的矢量控制方式两种。 基于转差频率的矢量控制方式与转差频率控制方式两者的定常特性一致,但是基于转差 频率的矢量控制还要经过坐标变换对电动机定子电流的相位进行控制,使之满足一定的条件,以消除转矩电流过渡过程中的波动。因此,基于转差频率的矢量控制方式比转差频率控 制方式在输出特性方面能得到很大的改善。但是,这种控制方式属于闭环控制方式,需要在 电动机上安装速度传感器,因此,应用范围受到限制。 无速度传感器矢量控制是通过坐标变换处理分别对励磁电流和转矩电流进行控制,然后通过控制电动机定子绕组上的电压、电流辨识转速以达到控制励磁电流和转矩电流的目的。这种控制方式调速范围宽,启动转矩大,工作可靠,操作方便,但计算比较复杂,一般需要专门的处理器来进行计算,因此,实时性不是太理想,控制精度受到计算精度的影响。 (4) 直接转矩控制
摘要 随着变频调速异步电动机在国内外市场上日益扩大应用,自90年代中期以来,我国有众多电动机生产企业设计、研制和生产适用于不同应用的各种系列变频调速三相异步电动机,例如:通用变频调速电动机系列、起重冶金变频调速电动机系列、隔爆变频调速电动机系列、电梯变频调速电动机系列、辊道变频调速电动机系列、牵引变频调速电动机系列等。从目前情况看,这些系列电动机能基本满足国内市场的需求原理是当定子三绕组通三相对称电流后,定转子产生旋转磁场,根据右手定则,转子绕组产生感应电动势,由于绕组是闭合的,所以产生感应电流,根据左手定则,转子绕组相当于空间绕组,进而产生电磁转距,合成磁转距大于阻转距时,电机起动,重点是三相异步电动机变频调速,一方面当f1<fN时,为恒转矩调速,转矩不变,额定转速降低,增大起动转矩Tst,另一方面当f1>fN时,为恒功率调速,调速前后功率不变,额定转速升高,减小启动转矩Tst。变频调速可以实现宽范围内的平滑调速,变频调速电机以简单的结构、优良的调速性能、较高的调速比,应用越来越广泛。本论文的主要就是利用三菱变频器,对三相异步电动机进行变频的调速。 关键词:三相异步电动机;三菱变频器;变频调速
Abstract With the increasing application of VVVF asynchronous motors in the domestic and foreign markets, since the middle of 90's, China's motor manufacturers design, development and production is suitable for various series of Variable-Frequency Adjustable-Speed Three-Phase Asynchronous Motor, different applications such as: General VVVF motor series, crane and metallurgical VVVF motor series, flameproof inverter motor series, VVVF elevator motor series, roller VVVF motor series, inverter-fed motor series. Judging from the current situation, these series motors can basically meet the needs of the domestic market is the principle when the stator winding through three symmetrical three-phase current, stator and rotor rotating magnetic field is generated, according to the right-hand rule, the rotor winding induced electromotive force, the winding is closed, so generate induction current, according to the left, the rotor winding is equivalent to space winding, and electromagnetic torque, starting motor magnetic torque is greater than the resistance of synthesis of torque,, the focus is variable frequency speed control of three-phase asynchronous motor, hand when F1 < fN, for constant torque speed, torque is not changed, the rated speed is reduced, increase the starting torque of Tst, on the other hand, when F1 > fN, for constant power speed, speed regulation and constant power, rated speed increased, reduce the starting torque Tst. VVVF can achieve smooth speed wide range, frequency conversion motor with simple structure, good performance of speed regulation, high speed adjustment, more and more extensive application. The main of this paper is to utilize Mitsubishi inverter frequency, speed control of three-phase asynchronous motor. Key words: threephase asynchronous motor ;Mitsubishi inverter ;frequency control
变频器远程控制及调速原理 -----唐玉龙 一、变频器的远程控制 什么是变频器远程控制器在许多变频器的应用现场,电机与操作室距离较远。如将变频器安装在现场,不便于工人的观察与操作;如安装在操作室内,则动力线拉的距离太远,成本高,且对变频器本身及系统中其他设备造成干扰。针对上述应用情况,我们开发研制了变频器远程控制器产品。变频器远程控制器是一种实现变频器远程操作的智能仪表,通过RS485网络远程控制变频器的启动、停止、加速、减速、正反转,并实时显示变频器的工作频率、转速等运行状态信息。单机通讯距离可达1200米(9600bps),有效减少变频器的干扰。这样就可将变频器安装在电动机附近,通过屏蔽通讯线接到远端操作室内仪表盘上的变频器远程控制器上,在操作室内就能观察和操作变频器的运行状态。另外,变频器远程控制器还可接外置操作按钮,有手动/自动切换及监听等功能,可接入计算机控制系统,便于工程使用。二、变频器远程控制器的种类和功能我们研发的变频器远程控制器根据变频器的不同可分为标准型和加强型;根据通讯方式的不同可分为有线通讯、无线通讯;根据不同的通讯协议也分别有相应的产品。如果没有通讯接口或无法知道其通讯协议的变频器,可在变频器一端接上我们的远端转换器,将模拟信号和开关信号通过485网络传送到远程控制器上。这样对没有通讯口或无法知道通讯协议的变频器也都能使用,真正实现变频器万能远程控制器的功能。 二、交流异步电动机变频调速原理 变频器是利用电力半导体器件的通断作用把电压、频率固定不变的交流电变成电压、频率都可调的交流电源。 现在使用的变频器主要采用交—直—交方式(VVVF变频或矢量控制变频),先把工频交流电源通过整流器转换成直流电源,然后再把直流电源转换成频率、电压均可控制的交流电源以供给电动机。 变频器主要由整流(交流变直流)、滤波、再次整流(直流变交流)、制动单元、驱动单元、检测单元微处理单元等组成的。
变频器常用的几种控制方式 变频调速技术就是现代电力传动技术的重要发展方向,而作为变频调速系统的核心—变频器的性能也越来越成为调速性能优劣的决定因素,除了变频器本身制造工艺的“先天”条件外,对变频器采用什么样的控制方式也就是非常重要的。本文从工业实际出发,综述了近年来各种变频器控制方式的特点,并展望了今后的发展方向。 1、变频器简介 1、1 变频器的基本结构 变频器就是把工频电源(50Hz或60Hz)变换成各种频率的交流电源,以实现电机的变速运行的设备,其中控制电路完成对主电路的控制,整流电路将交流电变换成直流电,直流中间电路对整流电路的输出进行平滑滤波,逆变电路将直流电再逆变成交流电。对于如矢量控制变频器这种需要大量运算的变频器来说,有时还需要一个进行转矩计算的CPU以及一些相应的电路。 1、2 变频器的分类 变频器的分类方法有多种,按照主电路工作方式分类,可以分为电压型变频器与电流型变频器;按照开关方式分类,可以分为PAM控制变频器、PWM控制变频器与高载频PWM控制变频器;按照工作原理分类,可以分为V/f控制变频器、转差频率控制变频器与矢量控制变频器等;按照用途分类,可以分为通用变频器、高性能专用变频器、高频变频器、单相变频器与三相变频器等。 2、变频器中常用的控制方式 2、1 非智能控制方式 在交流变频器中使用的非智能控制方式有V/f协调控制、转差频率控制、矢量控制、直接转矩控制等。 (1) V/f控制 V/f控制就是为了得到理想的转矩-速度特性,基于在改变电源频率进 行调速的同时,又要保证电动机的磁通不变的思想而提出的,通用型变频器基本上都采用这种控制方式。V/f控制变频器结构非常简单,但就是这种变频器采用开环控制方式,不能达到较高的控制性能,而且,在低频时,必须进行转矩补偿,以改变低频转矩特性。 (2) 转差频率控制 转差频率控制就是一种直接控制转矩的控制方式,它就是在V/f控制的基础上,按照知道异 步电动机的实际转速对应的电源频率,并根据希望得到的转矩来调节变频器的输出频率,就可以使电动机具有对应的输出转矩。这种控制方式,在控制系统中需要安装速度传感器,有时还加有电流反馈,对频率与电流进行控制,因此,这就是一种闭环控制方式,可以使变频器具有良好的稳定性,并对急速的加减速与负载变动有良好的响应特性。 (3) 矢量控制 矢量控制就是通过矢量坐标电路控制电动机定子电流的大小与相位,以达到对电动机在d、q、0坐标轴系中的励磁电流与转矩电流分别进行控制,进而达到控制电动机转矩的目的。通过控制各矢量的作用顺序与时间以及零矢量的作用时间,又可以形成各种PWM波,达到各种不同的控制目的。例如形成开关次数最少的
变频器控制方式选型 概述:本文介绍了通用变频器的控制方式,以及在实际应用中如何选择合理的型号。 关键词:控制方式选型 1引言 变频技术是应交流电机无级调速的需要而诞生的。20世纪60年代以后,电力电子器件经历了SCR(晶闸管)、GTO(门极可关断晶闸管)、BJT(双极型功率晶体管)、MOSFET(金属氧化物场效应管)、SIT(静电感应晶体管)、SITH(静电感应晶闸管)、MGT(MOS控制晶体管)、MCT(MOS控制晶闸管)、IGBT(绝缘栅双极型晶体管)、HVIGBT(耐高压绝缘栅双极型晶闸管)的发展过程,器件的更新促进了电力电子变换技术的不断发展。20世纪70年代开始,脉宽调制变压变频(PWM-VVVF)调速研究引起了人们的高度重视。20世纪80年代,作为变频技术核心的PWM模式优化问题吸引着人们的浓厚兴趣,并得出诸多优化模式,其中以鞍形波PWM模式效果最佳。20世纪80年代后半期开始,美、日、德、英等发达国家的VVVF变频器已投入市场并获得了广泛应用。 2变频器控制方式 低压通用变频输出电压为380~690V,输出功率为0.75~560kW,工作频率为0~500Hz,它的主电路都采用交直交电路。其控制方式经历了以下四代。 2.1U/f=C的正弦脉宽调制(SPWM)控制方式 其特点是控制电路结构简单、成本较低,机械特性硬度也较好,能够满足一般传动的平滑调速要求,已在产业的各个领域得到广泛应用。但是,这种控制方式在低频时,由于输出电压较低,转矩受定子电阻压降的影响比较显著,使输出最大转矩减小。另外,其机械特性终究没有直流电动机硬,动态转矩能力和静态调速性能都还不尽如人意,且系统性能不高、控制曲线会随负载的变化而变化,转矩响应慢、电机转矩利用率不高,低速时因定子电阻和逆变器死区效应的存在而性能下降,稳定性变差等。因此人们又研究出矢量控制变频调速。 2.2电压空间矢量(SVPWM)控制方式 它是以三相波形整体生成效果为前提,以逼近电机气隙的理想圆形旋转磁场轨迹为目的,一次生成三相调制波形,以内切多边形逼近圆的方式进行控制的。经实践使用后又有所改进,即引入频率补偿,能消除速度控制的误差;通过反馈估算磁链幅值,消除低速时定子电阻的影响;将输出电压、电流闭环,以提高动态的精度和稳定度。但控制电路环节较多,且没有引入转矩的调节,所以系统性能没有得到根本改善。 2.3矢量控制(VC)方式 矢量控制变频调速的做法是将异步电动机在三相坐标系下的定子电流Ia、Ib、Ic、通过三相-二相变换,等效成两相静止坐标系下的交流电流 Ia1Ib1,再通过按转子磁场定向旋转变换,等效成同步旋转坐标系下的直流电流Im1、It1(Im1相当于直流电动机的励磁电流;It1相当于与转矩成正比的电枢电流),然后模仿直流电动机的控制方法,求得直流电动机的控制量,经过相应的坐标反变换,实现对异步电动机的控制。其实质是将交流电动机等效为直流电动机,分别对速度,磁场两个分量进行独立控制。通过控制转子磁
变频器原理及应用试卷 一.选择题 1.下列选项中,按控制方式分类不属于变频器的是(D )。A.U/f B.SF C.VC D.通用变频器 2.下列选项中,不属于按用途分类的是(C )。 A.通用变频器B.专用变频器C.VC 3.IPM是指( B )。 A.晶闸管B.智能功率模块C.双极型晶体管D.门极关断晶闸管 4.下列选项中,不是晶闸管过电压产生的主要原因的是(A )。 A.电网电压波动太大B.关断过电压 C.操作过电压D.浪涌电压 5.下列选项中不是常用的电力晶体管的是(D )。A.单管B.达林顿管C.GRT模块D.IPM 6.下列选项中,不是P-MOSFET的一般特性的是(D )。A.转移特性B.输出特性C.开关特性D.欧姆定律
7.集成门极换流晶闸管的英文缩写是(B )。A.IGBT B.IGCT C.GTR D.GTO 8.电阻性负载的三相桥式整流电路负载电阻 L R上的平均电 压 O U为(A )。 A.2.34 2 U B.2U C.2.341U D.1U 9.三相桥式可控整流电路所带负载为电感性时,输出电压 平均值 d U为为(A ) A.2.34 2cos U B.2U C.2.341U D.1U 10.逆变电路中续流二极管VD的作用是(A )。 A.续流B.逆变C.整流D.以上都不是11.逆变电路的种类有电压型和(A )。 A.电流型B.电阻型C.电抗型D.以上都不是 12.异步电动机按转子的结构不同分为笼型和(A )。A.绕线转子型B.单相C.三相D.以上都不是 13.异步电动机按使用的电源相数不同分为单相、两相和(C )。 A.绕线转子型B.单相C.三相D.以上都
变频器常用的几种控制方 式 Prepared on 22 November 2020
变频器常用的几种控制方式 变频调速技术是现代电力传动技术的重要发展方向,而作为变频调速系统的核心—变频器的性能也越来越成为调速性能优劣的决定因素,除了变频器本身制造工艺的“先天”条件外,对变频器采用什么样的控制方式也是非常重要的。本文从工业实际出发,综述了近年来各种变频器控制方式的特点,并展望了今后的发展方向。 1、变频器简介 变频器的基本结构 变频器是把工频电源(50Hz或60Hz)变换成各种频率的交流电源,以实现电机的变速运行的设备,其中控制电路完成对主电路的控制,整流电路将交流电变换成直流电,直流中间电路对整流电路的输出进行平滑滤波,逆变电路将直流电再逆变成交流电。对于如矢量控制变频器这种需要大量运算的变频器来说,有时还需要一个进行转矩计算的CPU 以及一些相应的电路。 变频器的分类 变频器的分类方法有多种,按照主电路工作方式分类,可以分为电压型变频器和电流型变频器;按照开关方式分类,可以分为PAM控制变频器、PWM控制变频器和高载频PWM 控制变频器;按照工作原理分类,可以分为V/f控制变频器、转差频率控制变频器和矢量控制变频器等;按照用途分类,可以分为通用变频器、高性能专用变频器、高频变频器、单相变频器和三相变频器等。 2、变频器中常用的控制方式 非智能控制方式 在交流变频器中使用的非智能控制方式有V/f协调控制、转差频率控制、矢量控制、直接转矩控制等。
(1) V/f控制 V/f控制是为了得到理想的转矩-速度特性,基于在改变电源频率进行调速的同时,又要保证电动机的磁通不变的思想而提出的,通用型变频器基本上都采用这种控制方式。 V/f控制变频器结构非常简单,但是这种变频器采用开环控制方式,不能达到较高的控制性能,而且,在低频时,必须进行转矩补偿,以改变低频转矩特性。 (2) 转差频率控制 转差频率控制是一种直接控制转矩的控制方式,它是在V/f控制的基础上,按照知道异步电动机的实际转速对应的电源频率,并根据希望得到的转矩来调节变频器的输出频率,就可以使电动机具有对应的输出转矩。这种控制方式,在控制系统中需要安装速度传感器,有时还加有电流反馈,对频率和电流进行控制,因此,这是一种闭环控制方式,可以使变频器具有良好的稳定性,并对急速的加减速和负载变动有良好的响应特性。 (3) 矢量控制 矢量控制是通过矢量坐标电路控制电动机定子电流的大小和相位,以达到对电动机在d、q、0坐标轴系中的励磁电流和转矩电流分别进行控制,进而达到控制电动机转矩的目的。通过控制各矢量的作用顺序和时间以及零矢量的作用时间,又可以形成各种PWM波,达到各种不同的控制目的。例如形成开关次数最少的PWM波以减少开关损耗。目前在变频器中实际应用的矢量控制方式主要有基于转差频率控制的矢量控制方式和无速度传感器的矢量控制方式两种。 基于转差频率的矢量控制方式与转差频率控制方式两者的定常特性一致,但是基于转差频率的矢量控制还要经过坐标变换对电动机定子电流的相位进行控制,使之满足一定的条件,以消除转矩电流过渡过程中的波动。因此,基于转差频率的矢量控制方式比转差
课后辅导题一 一、选择题 1、正弦波脉冲宽度调制英文缩写是( C )。 A:PWM B:PAM C:SPWM D:SPAM 2、三相异步电动机的转速除了与电源频率、转差率有关,还与( B )有关系。 A:磁极数B:磁极对数C:磁感应强度D:磁场强度 3、目前,在中小型变频器中普遍采用的电力电子器件是( B )。 A:SCR B:GTO C:MOSFET D:IGBT 4、IGBT属于( B )控制型元件。 A:电流B:电压C:电阻D:频率 5、变频器种类很多,其中按滤波方式可分为电压型和( A )型。 A:电流B:电阻C:电感D:电容 6、电力晶体管GTR属于( A )控制型元件。 A:电流B:电压C:电阻D:频率二简单综合题 1、按照转子结构的不同,三相异步电动机分为哪两大类?从运行可靠性上看,上述哪一类电动机具有优越性? 2、三相异步电动机的转速n与哪些因素有关? 答:三相异步电动机的转速n与电源频率?1、磁极对数P、转差率s有关。 3、三相异步电动机有哪些调速方式?并比较其优缺点。 答:三相异步电动机有变极调速、变转差率调速和变频调速三种调速方式。 变极调速是有级调速,调速的级数很少,只适用于特制的笼型异步电动机,这种电动机结构复杂,成本高。变转差率调速时,随着s的增大,电动机的机械特性会变软,效率会降
低。变频调速具有调速范围宽,调速平滑性好,调速前后不 改变机械特性硬度,调速的动态特性好等特点。 4、在三相异步电动机的机械特性曲线上,标出与下列转速对应的转矩:、、。 5、变频调速时,改变电源频率?1的同时须控制电源电压U1,试说明其原因。 答:在变频调速时,若?1下降,U1不变,则Φm上升。因为 Φm已设计在接近饱和处,Φm上升即进入磁化曲线的饱和区, 引起工作电流大幅度增加,使电动机过热损坏;若?1上升, U1不变,则Φm下降,将使工作电流下降。由于电流的下降, 电动机的输出转矩不足。为了保持电动机的Φm不变,即电 动机的转矩不变,在?1变化的同时,U1必须同时变化,使 U1与?1的比值保持恒定,即U1/?1 =常数。 6、描绘三相异步电动机基频以下变频调速的机械特性曲线,并说明其特点。 7、说明三相异步电动机低频起动的优越性。 答:电动机以很低的频率起动,随着频率的上升,转速上升, 直至达到电动机的工作频率后,电动机稳速运行。在此过程 中,转速差△n被限制在一定的范围,起动电流也将被限制 在一定的范围内,而且动态转矩△T很小,起动过程很平稳。 8、说明三相异步电动机直流制动的原理,并描绘制动前后的机械特性曲线。 9、变频调速时,由于?1降低使电动机处于回馈制动状态,试说明其制动的原理,并描绘制 动前后的机械特性曲线。 10、在定性分析变频电路时,大功率开关器件的工作状态有哪两种?并画出其伏安特性曲线。 11、画出GTO的伏安特性曲线,并说明其工作原理。 12、画出IGBT的输出特性曲线及转移特性曲线,并说明其工作原理。 13、说明什么是脉冲宽度调制技术? 14、PWM逆变电路的单极性控制和双极性控制有什么区别? 15、以三相桥式SPWM逆变电路为例,说明脉宽调制逆变电路调压调频的原理。
通用变频器控制异步电动机正反转 一、实训的目的: 1、掌握通用变频器控制异步电动机的主回路接线; 2、掌握通用变频器控制异步电动机变频器内的参数的设定; 3、掌握通用变频器控制异步电动机变频器面板启动方法; 4、掌握通用变频器控制异步电动机变频器外部端子控制变方式的电 动机启动方法; 5、掌握通用变频器控制异步电动机的正反转运行方法; 二、实训所需元件 本实训使用ATV31变频器和普通异步电动机,为保证安全,ATV71变频器组件不能上电。 三、实训电路及原理 本实训采用的电路图如图1所示,LI1、LI2、LI3为三相380V电源进线,Q为小型断路器,M为三相异步电动机,S1、S2为转换按钮,用于变频器的外部端子启动,其中S1为正转启动,S2为反转启动(通过设定变频器内部参数来设定),PE为保护接地。
\ 图1 实训二电路图 四、实训的内容及步骤 1、按图1所示进行外部连线(ATV31变频器的动力引出线和控制线已经引出到实验板的端子上,在连线时不需打开变频器的面板,电动机线直接引到相应的端子上,并确认相应的线号)。 2、确定接线正确无误,连接可靠后,将ATV31变频器上电。 3、在I/O 菜单组中确认以下参数; 参数 工厂设定值 本实验设定值 TCC 2C LOC TCT TRN TRN LI1 LI2 LI3 5 1 3 5 6 4 2 Q 3 3 4 4 S2 S1 L1 L2 L3 LI1 LI2 24V PE U V W W U V PE M 3~
RRS LI2 LI2 4、在CTL菜单组中确认以下参数: 参数工厂设定值本实验设定值 FR1 AI1 AIP RFC FR1 FR1 CHCF SIN SEP CD1 TER LOC 5、在FUN菜单中设定停车方式为斜坡停车(STT为RNP)。 6、将菜单显示转换为SUP菜单组,显示当前菜单FRH,按ENT、上和下键,分别设定30.5Hz和40.5Hz,按RUN键,使电动机启动。改变SET菜单中ACC和DEC(加速时间和减速时间)参数,观察电动机的转换变化情况。当电动机稳定运行后,利用闪光测速仪记录频率与电动机实际转速的数值。 7、在I/O、CTL菜单组中改变以下参数; 参数工厂设定值本实验设定值TCC 2C 2C TCT TRN TRN RRS LI2 LI2 8、在合上S1按钮,电动机正转;断开S1按钮,电动机停止运行。
变频器控制方式有哪些_变频器有几种控制方式_变频器的控制方式详解变频调速技术是现代电力传动技术的重要发展方向,而作为变频调速系统的核心变频器的性能也越来越成为调速性能优劣的决定因素,除了变频器本身制造工艺的先天条件外,对变频器采用什么样的控制方式也是非常重要的。本文从工业实际出发,综述了近年来各种变频器控制方式的特点,并展望了今后的发展方向。 变频器简介1)变频器的基本结构 变频器是把工频电源(50Hz或60Hz)变换成各种频率的交流电源,以实现电机的变速运行的设备,其中控制电路完成对主电路的控制,整流电路将交流电变换成直流电,直流中间电路对整流电路的输出进行平滑滤波,逆变电路将直流电再逆变成交流电。对于如矢量控制变频器这种需要大量运算的变频器来说,有时还需要一个进行转矩计算的CPU以及一些相应的电路。 2)变频器的分类 变频器的分类方法有多种,按照主电路工作方式分类,可以分为电压型变频器和电流型变频器;按照开关方式分类,可以分为PAM控制变频器、PWM控制变频器和高载频PWM 控制变频器;按照工作原理分类,可以分为V/f控制变频器、转差频率控制变频器和矢量控制变频器等;按照用途分类,可以分为通用变频器、高性能专用变频器、高频变频器、单相变频器和三相变频器等。 变频器控制方式选择依据对于控制方式,要根据生产机械的具体要求来进行选择。 1、二次方律负载对于离心式风机、水泵和空气压缩机一类的二次方律负载,一般采用V/F控制方式为宜。因为V/F控制方式有低励磁U/f线,在低频运行时可以更好地节能。矢量控制方式实质上是使电动机始终保持额定磁通的控制方式,不可能实现低励磁。 2.恒转矩负载 (1)对于负载率经常变动、调速范围又不很大的负载,一般以选择无反馈矢量控制为好,因为V/F控制方式的转矩提升量不易预置得恰到好处,但采用无馈矢量控制方式时,须注