2 自平衡独轮车动力学模型的建立
2.1 自平衡的原理
动态平衡原理即为自平衡独轮车的工作原理。通过运动补偿算法,运用加速度传感器和陀螺仪对车体姿态测试,同时借助精密的伺服控制系统高敏地对电机进行驱动,并作适度的调节,从而使整个车体的平衡性以及稳定性得到确保。由图 2.1能够得出,自平衡独轮车的车体摆动和它的转动是存在一定分离性的,驾驶人员的两腿将车身的两端夹紧,进而和车体产生了一个整体。一旦其身体倾向后方,那么驱动车轮就会朝后转,从而防止车体倒向后方;反之,若是朝前,那么车轮就会朝钱转;若其身体处于竖直状态,那么则独轮车也就表现为动态平衡。独轮车控制系统的重中之重就是平衡控制。就自平衡独轮车加以建模并做深度分析,便能够对系统的特性产生更多的了解,这对于相应控制算法的设计规划甚为有益。
图2.1
2.2动力学建模
2.2.1 物理模型化简
自平衡独轮车不是平面机构,需要采用空间坐标的方式对其进行分析,坐标定义可详见图2.2,能够看出其自由度共有6个,其中平移、旋转各为3个。俯仰角Ψ、横滚角γ、偏航角Φ均为其旋转姿态角。因为独轮车的左右方向以驾驶者自身的调节为主,只能够控制前方和后方,故而把模型简单化至x o z平面,仅对这两个方向上的平衡控制进行探讨。
图2.2
运动学是力学的一个分支,主要是站在几何的视角上来对物体位置伴随时间的波动规律进行阐述及探究的,刚体的运动学以对其自身的运动特性的研究为主,譬如转动经过、位移、角速度及其加速度等。由于有部分难以测得的因素存在于独轮车的机械零件以及运动经过当中,因而必须对其做简化建模,因此作如下假设:
1驾驶者和独轮车运动相同,可将二者看成一个整体,假定是刚体;
2行走轮为质心在圆心的空心圆环;
3在独轮车行驶期间,车轮和地面从始至终都处于彼此接触的状态,且一直是纯滚动;
4忽略其他摩擦和外界干扰。
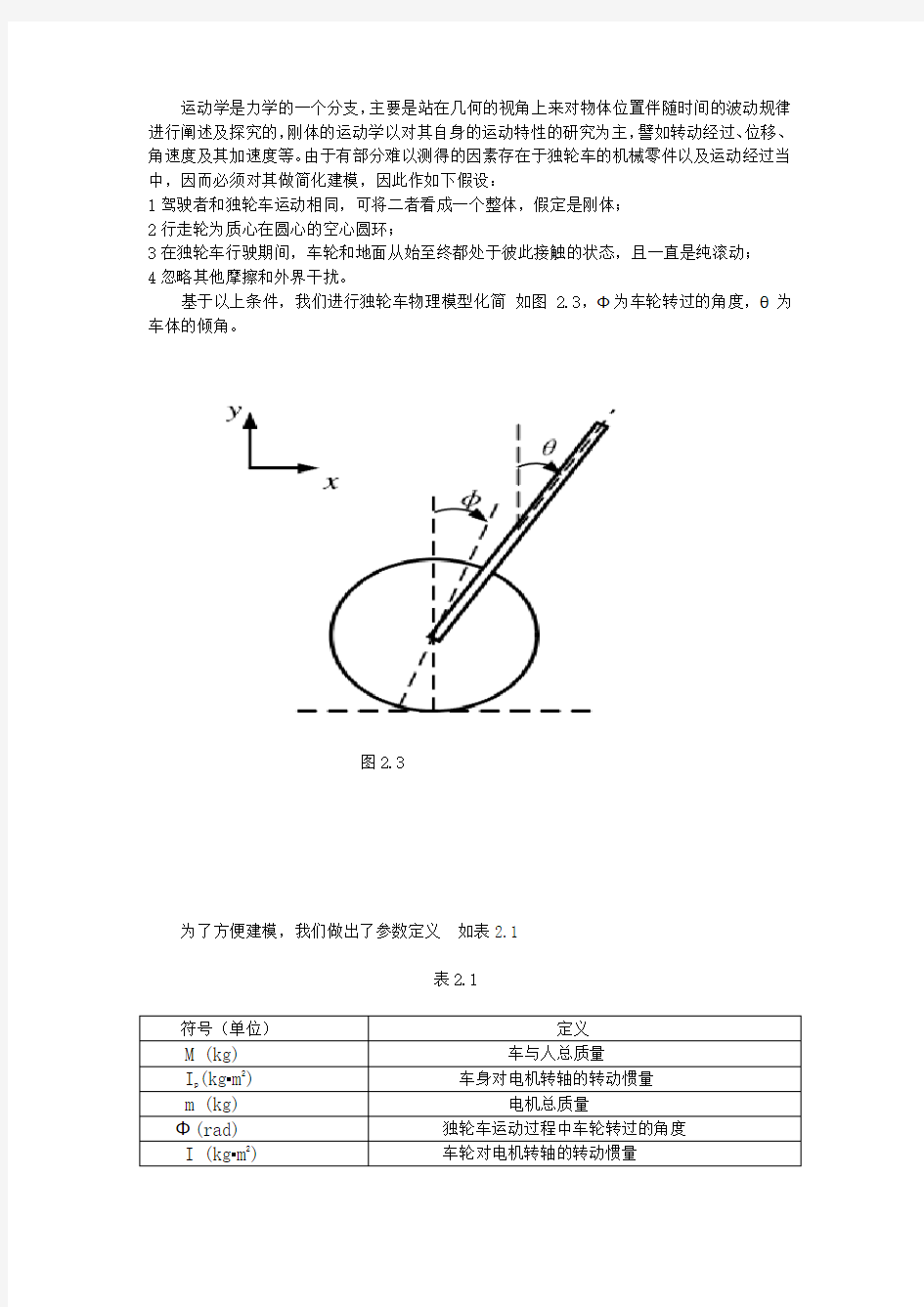
基于以上条件,我们进行独轮车物理模型化简如图 2.3,Φ为车轮转过的角度,θ为车体的倾角。
图2.3
为了方便建模,我们做出了参数定义如表2.1
表2.1
测出电机和轮胎质量 m 、 车身和骑行者质量 M 、车身等效质心至电机转轴的间距 L 、车轮半径r 分别为10kg 、80kg 、0.8m 、0.2m 。
按照运算转动惯量的公式,即可把车轮、车身二者分别对电机转轴的转动惯量I 、p I 算出,即
2
22.05.0m kg mr I ?==
( 2.1 )
22
683)2(m kg L M I p ?== ( 2.2 )
2.2.2 动力学建模
本文采用牛顿力学分析方法,主要对自平衡独轮车车轮的受力情况进行研究,将动力学
方程全面得出。该研究法见图 2.4能够体现出来 。
图 2.4
经过分析,得到车轮的受力表示图,由图知道车轮受力情况可分为两种,一种是水平方
向,另一种是竖直方向,同时车轮本身存在转矩,分析后可建立下列方程:
水平方向:
F f x m -= ( 2.3 ) 竖直方向: 0=--=mg N P y m ( 2.4 ) 车轮转矩方程 : rf T I -=φ (2.5)
车轮位移加速度和转动角加速度存在如下关系 :
r
x φ =
(2.6)
将式(2.6)代入式(2.5),可得 :
r rf T Ix )(-= (2.7)
我们按照对车轮受力状况的解析途径,来分解剖析车身的受力状况,可见图 2.5。
图 2.5
解析车身受力分析图,我们知道车身受力情况分两种,即水平、竖直两个方向,同时车
身本身具有转矩,所以可以列写以下方程:
水平方向 :
F x
M p = (2.8)
竖直方向 : Mg P y
M p -= (2.9) 车身转矩方程 :
T FL PL I p --=θθθ
cos sin (2.10) 由图可知 :
θs i n L x x p += (2.11)
θcos L y y p +=
(2.12)
则: θθθθsin cos 2 L L x
x p -+= (2.13)
θθθθcos sin 2 L L y
y p -+= (2.14)
由式 (2.3)和式(2.5)得:
F r
r x m -=..
x
I -T (2.15) 由式(2.8)和 (2.11) 可得:
F L L x M =-+)s i n c o s (2
θθθθ (2.16)
将式(2.16) 代到式(2.15) 可得:
)sin cos (x
I -T 2..
θθθθ
L L x M r
r x m -+-= (2.17) 将(2.17)化简为:
0)(sin cos 2
2=-+++-r
T x r I m M ML ML θθθθ (2.18) 将式( 2.9)式( 2.14)式( 2.16)代入( 2.10) 得 :
T L L x
ML g L L y ML I p --+-+--=)sin cos (cos cos sin (sin 22θθθθθθθθθθθ ) (2.19)
因为
0=y
式(2.19) 化简为: 0sin cos )(2=+-++T MLg x ML ML I p θθ
(2.20) 在控制原理中,可以用下面的形式表示系统的状态方程:
??
???+=+=)()()()()()(t t t t t t DU CX Y BU AX X
(2.21)
式子里, )(t X 、)(t X 、A 、B 、U 、)(t Y 分别是系统状态变量、此变量的一阶导数、系统的
状态矩阵、输入变量矩阵、输入向量、输出变量,而C 、D 均为输出矩阵。
按照式子(2.21),可得出独轮车状态方程,即:
?????????????+????????????=?
???
?
?
??????+????????????=?????
???????DT
x x C x
x BT x x A x x T
θθθθθθθθ (2.22) 式子里
x 及x 是车轮的水平位移及速度, θ及θ 是车身的俯仰角度及角速度; Y (t) 、
X (t)分别是输出变量、系统的状态变量,且前者恰好是后者,输入向量U=T
式子 (2.18)及(2.20)综合成式(2.22)的形式 得:
[]????????????????
?????????=?
???
?
?
??????????????????+???????????
?=????????????θθθθθθθθθθθ x x x
x T g g f f x x
x
T
1111)()(00)()(2121 (2.23) 其中:
)sin sin (122
1θθθ
aMLg cML a bc f --=
)(12
1a r c
a bc g +-=
)sin sin (1222θθθ aML bML a bc f --=
g 2=
2a -bc 1- ( r
a
+ b) θcos ML a =
2
r I
m M b +
+= 2ML I c p +=
从式子(2.21)能够获悉,自平衡独轮车系统具有高阶次和非线性的特点。借助 Mat lab
软件里面的 Simulink 工具箱来仿真式子(2.23)所表示的独轮车动力学模型,从而对模型的无误性进行检验及证实。在此工具箱里面,把仿真框图画出,可见图 2.6 ,同时在仿真模型里面代入详细的参数值。其中,约束倾斜角度θ的角度,使其不超过(?π/2,π/2),故而,若θ超出此范围则表明独轮车完全倒地,角度值是固定的。
图 2.6 独轮车仿真示意图
在没有对外部控制实施加设期间,即也系统输入T = 0的时候,令车体之前倾角在0.1rad 时,该独轮车的运行时间v和倾斜角度θ的波动曲线见图2.7能够体现出来。由零输入响应的模拟波形可以清楚的知道够,在没有对电动独轮车外部控制实施加设时,如果车体具有少量的倾斜,那么车体终究会倒地,在其倒下的同时独轮车的运行方向与倾倒方向恰恰相反。
图2.7系统零输入响应图
如果系统的起初状态为0,则其输入 T 在 0.5s 的时候从 0 逐渐变成了 2,那么即在0.5s,而独轮车电机的转矩输出是2N ? m,可将其v与θ的波动曲线得出,详见图 2.8。从零状态响应的仿真波形能够获悉,此电机对转矩输出的时候,其倾倒的方向与它自身的行进方向相反。
图 2.8系统零状态响应图
从以上的仿真结果不难发现,这和现实的车体运行状况大致无异,可以说建模的无误性得到了检验及证实。
3.2 平衡算法
借助设立及分析自平衡独轮车动力学模型,可以获知独轮车系统具有非线性、非稳定性、高阶次的特点。此类独轮车是基于自平衡独轮机器人发展而来的,故而其平衡控制算法极多。譬如,线性控制算法、智能控制算法当中分别有多种控制。以下就这两种算法里面的PID 控制、模糊控制展开详细的探讨及分析,并对其在自平衡独轮车系统当中所展现出来的控制成效进行对比。
3.2.1 PID算法
此算法极具代表性,它是工业控制领域当中有效性最高的一种控制手段,优势是复杂度低、易于整定参数、鲁棒性佳等,运用于多个领域之中。借助对给定值和现实输出值的偏差
的比例(Proportion )、微分(Differential )、积分(Integral )进行线性组合来达成对被控对象的有效控制,这样的经过即为所谓的 PID 控制。
图 3.3是模拟 PID 的原理框图,其中,r(t)、y(t)分别是系统的给定量、输出量,e (t)是此二者相减之后得出的偏差,也就是
)()()
(t y t r t e -= ( 3.11 )
图3.3
模拟 PID 的输入、输出量分别是 e(t)、u(t),且后者对被控对象产生影响,从而得到模拟 PID 的控制算法:
dt
r de T dt t e T t e K t u d
i
p )
()(1
)([)(t
++
=?
( 3.12) 1、比例部分
比例部分的数学式表示是:)(t e K p ?
在模拟PID 控制器里,比例环节主要用以对偏差瞬间做出反应。若有偏差出现,那么马上就会有控制作用出现在控制器中,使得控制量朝着降低偏差的方向波动。比例系数K p 决定了控制作用的大小,前者愈大则后者愈强,同时过渡过程愈快,控制过程的静态偏差也愈小;反之,出现振荡的几率就会比较高,从而使系统处于非稳状态。因而,必须挑出适宜的 K p ,唯有如此,才会收获较小的静差及过渡时间的效果,并且非常平稳。 2、 积分部分
积分部分的数学式表示是: ?t
i
p t e T K 0)( 由上式能够看出,但凡有偏差
e(t)出现,那么它的控制作用就持续上涨;唯有在e(t)=0
的时候,它的积分才可以是一个常数,而控制作用才会是一个不会上涨的常数。因而,积分部分能够把系统的偏差清除掉。
尽管积分部分的调节效用能够把静态误差除去,然而也会造成系统响应速度的减缓以及超调量的上涨。积分常数Ti 愈大,则积分的累积作用就愈加微弱,这个时候系统在过渡之时无振荡出现;然而若将Ti 提高,那么清除该误差的经过就会变长,但是却能够使超调量有所下降,同时系统的平稳性也会上涨。反之,若Ti 偏小,那么相应的振荡就会出现,然而除去偏差所用的时间也会愈少。因而,在对Ti 加以明确的时候,应以现实的控制要求为前提。
3、 微分部分
微分部分的数学式表示是:t
d
p d t de T K )
(? 现实的控制系统不但应把静态误差除掉,而且同时也应把调节时间减短。在偏差发生或改变的一刹那,既要马上对偏差量进行响应(比例环节的价值),又应按照其改变走向提早把适宜的纠正提出。为使这一点得以达成,可基于PI 控制器把微分部分添进来,从而变为PID 控制器。
微分部分主要是对偏差的改变进行阻抑。它的控制是按照偏差的波动走势(改变速度)而开展的。偏差波动愈快,则微分控制器的输出愈高,还可以在偏差值上涨前做更正。引进此部分,对于振荡的对抗、超调量的降低以及系统平稳性的保持都十分有益,尤其是对髙阶系统更为有益,它使得系统的跟踪速度得以提高。然而微分作用对于输入信号的噪声颇为灵敏,因而通常不会将其用在噪声过大的系统里面,或是在其产生效用前先完成对输入信号的滤波。
此部分的作用取决于微分时间常数Td 。Td 愈大,那么其对偏差e (t )波动的阻抑作用就会愈加突出;反之就会愈加微弱。可见,此部分在系统稳定性的维持方面颇为关键。对其做出最合理的选取,即可收获最佳的微分作用。
3.2.2 PID 控制设计
结合以上阐述,以PID 控制算法来对其系统进行掌控。对独轮车的角度以及角速度信息以姿态检验模块征集,然后根据PID 控制法实施预算,把得到的转矩控制量对独轮车的电动机转动实施驱动,此类过程就成为了一个环闭的PID 控制,我们可以通过图3.4进行观察。
图 3.4
因为会有噪音干扰到姿态检测的过程,但是PID 控制算法内会有一计分部分,会将噪音干扰积累起来,这个设置不但不能将声音干扰消除,还会造成系统的不稳定,所以应该将该设置除去,在使用过程中只使用比例和微分,即PD 控制算法是根据独轮车建模的结果以及PID 控制理论为核心的,并以T (转矩控制量输出)、姿态检测时获得的角度θ和角速度.
θ进行计算,可以获得以下公式:
θθ d p K K T
+= ( 3.13 )
仿真实验
自平衡独轮车PD控制算法能够以Simulink(Mat lab软件内系统)实施模拟研究,我们以图 3.5实施观察模拟框图,从而对其效果进行验证,独轮车的模拟建模框线图即Subsystem,我们可以通过第二章中的图2.6进行观察。
图3.5
独轮车角度在0.1rad的时候,车体逐渐根据静止状态开启的时候,它的倾斜角度
.θ倾
斜角速度
.
θ变化情况。我们可以通过图3.6来观察到,独轮车在控制系统的作用下恢复至平
衡竖直状态需要2s。
图 3.6 初始倾角启动仿真曲线图
独轮车由静止状态启动,会给车增加一个2s 的力矩干扰(大小约为20m N )。我们能够以图3.7进行观察,车体由于力矩干扰以及模糊控制器的影响逐渐与下平衡状态进行分离。当2s 的时间区间过去后,力矩干扰消失,独轮车仅因为控制器的影响,车体逐渐变成平衡竖直状态需要4s 。
图 3.7 力矩扰动仿真曲线图
3.2.3 模糊控制算法
1965年,L.A.Zadeh教授(美国加利福尼亚大学控制论专家)在《Fuzzy Set》当中全面供应了该模糊数学,从而很多相关学者根据它实施了全面的分析,不断地丰富其理论,改进其方法,同时还在社会、自然科学的所有领域当中对其加以大范围地运用,特别是在知识工程开发及第五代计算机的研发中起着非常关键的作用。1973年,控制领域第一次运用了模糊逻辑。1974年,英国的E.H.Mamdani在控制蒸汽机及锅炉的时候对其进行了运用。在这之后的多年间,其持续发展,同时其运用范围变得愈加广阔。因为模糊逻辑自身就拥有一种体系理论方法,也就是专业工作者对语音信息加以建构同时对其进行转化,使其变成控制手段,所以可以使诸多复杂度高并且难以完成对高精度数学模型的设立的系统的控制方面的问题得以化解,因而,在控制、推理两大系统当中不明确、不精确的一种有效手段。就广义而言,模糊控制是以模糊推理为基础,对人的思维途径进行仿照,是用于无法完成上述模型的设立的对象的一种控制措施。其源于控制理论及模糊数学,而且还是仅可控制的关键所在。以下就其特点展开阐述:
1)控制系统的设计仅需对现场操作工作者的知识经验和相关数据加以供应即可,而无需将被控对象的精准数学模型给出。
2)其鲁棒性佳,对于一般无法处理的时变、非线性等问题,它都可以化解。
3)无需数学变量,而是以语言变量将其取而代之,容易将专业精英的“知识”得出。
4)其对“不精确推理”进行了运用。整个推理经过都是对人的思维经过的仿照。因有人的经验参与其中,故而可以使复杂度较高或是失常的系统恢复到正常的工作状态。
以往的模糊控制器根据模糊集合理论作为基础全面转化了操作人员的语言规则,使它全面成为了自行控制方案(很多情况为模糊规则表查询),它的设计针对目标精确数学模型并没有任何的要求,控制算法的设计以及更正都是借助其语言知识模型来完成的。
从上世纪九十年代起,有关于模糊控制系统的研究收获了突出性成果,譬如软计算技术、
模糊状态方程和稳定性分析等,这使得相应的理论体系得到了极大的补充。在诸多的现实控制系统当中,都运用了模糊控制,并且是大范围的,譬如合金钢冶炼控制系统、铸铁退火炉温度控制系统等。除此以外,机器人控制、热交换过程控制、污水处理、患者血压调节等系统里面对其也有所运用。它在日用家电产品当中的运用已非常多见,譬如借助其来完成对水温的自由控制。
模糊控制涵盖于智能控制之中,它对于被控对象的控制是借助对人的决策的借鉴而达成的,而且并未对该对象的精确系统模型有需求,故而可以有效地控制大多数控制过程。譬如在对锅炉温度加以控制期间,以温度计测出温度是300 摄氏度,相关工作者基于此精确度,在自己的头脑中形成“温度偏低”的思想,接着把此概念对比于自身所积累的相应经验,即可做出“温度过低应添燃料到锅炉里”的判断,然后其再精准地阐释“加热锅炉”这一个模糊概念,譬如把100斤煤添进锅炉里,从而即可使整个控制环节顺利达成。
模糊控制器结构可详见图3.8:
图 3.8
1)模糊化
其具体指的是转变精确的输入信息,并使其变成模糊信息的经过,通常参考输入与系统输出的偏差及偏差的导数即为所谓的输入信息,接着对此类信息其作尺度变换,把其映射到向量化论域里,再模糊化处理论域里面的输入量,使其变成模糊量(以模糊集合代表)。2)知识库
它主要是根据模糊控制规则库、数据库组合而成,分别有不同变量的隶属度函数和模糊空间的分级数等等,规则库当中包含很多其规定,专业的掌控知识与经验都都包含在内。3)模糊推理
它是模糊控制器的重要部分,有着仿照人类的大脑的出自模糊思维的推导途径,相应的步骤是借助知识库完成的。
4)解模糊
其主要是转换生成于模糊推理的模糊控制量,使其变为可以运用于系统内的精确量,先模糊处理前者,使其变成论域里面的清晰量,最后在完成对清晰量的尺度变换,使其成为现实的控制量。
3.2.4 模糊控制器的设计
由于非线性、高阶次等都是自平衡独轮车模型所表现出来的特点,以往的控制器的控制效果无法达到最佳,故而要对一款非线性控制器加以设计。基于前文的分析,对独轮车的模糊控制器进行设计及研究,从而使俯仰角度保持为零。按照俯仰角度以及俯仰角速度,同时结合设计的控制规则,把适宜的电机控制量获取,可以较好地契合于系统的非线性。
1)模糊控制器的结构选择
此次所设计的是一个二维模糊控制器,其原理可详见图 3.9,其中,e 、 ec 代表完成滤波之后俯仰角度及起角速度,u 是输出至电机的转矩控制量。
图 3.9
2)模糊控制参数的确定
在分析了模糊控制的大致原理之后可以看出,控制系统在对独轮车实施模糊掌控之前,应该以姿态传感器来对其信息实施征集,在落实程序的量化处置之后,将它变成模糊控制算法的输入量,然后再实施模糊处理,从而使其转至模糊集论域。在结束规则库的模糊推理之后,便可将模糊输出量获悉,再模糊集论域之中的输出量实施转换,使其转至基本论域之中,把现实输出量运算出来,从而达成对独轮车电机转动的控制。
根据对独轮车平衡的掌控需求,所设计出来的倾斜角度为20 度,故E 的基本论域是[-20,20]。
独轮车在工作期间的角速度约为-100到100 度/秒,故 EC 的基本论域是[-100,100]。
电机的转矩控制量是 0至50,故 U 的基本论域是[-50,50],其中的负值表面电机·1是反向转动的。
令 E、EC 、U 的量化论域均为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}。3)模糊化
以下是本文所设计的误差 E,误差变化率 EC、控制量 U 的模糊集定义:
E={NB,NM,NS,ZO,PS,PM,PB};EC={NB,NM,NS,ZO,PS,PM,PB};
U={NB,NM,NS,ZO,PS,PM,PB}。
其中,NS=负小,NM=负中,NB=负大,ZO=零,PB=正大,PM=正中,PS=正小。
4)模糊控制量隶属度函数的建立
借助 Matlab 软件的 Fuzyy 工具箱完成对电动独轮车的模糊控制器的设立,可见图 3.10。
图 3.10 电动独轮车模糊控制器
对倾角及其变化率、转矩控制量的隶属度函数进行设立,分别可见图3.11、3.12 、3.13 。
图 3.11 倾角隶属度函数
图 3.12倾角变化率隶属度函数
图 3.13转矩控制量的隶属度函数
5)模糊控制规则的建立
电动独轮车共计有49条控制规则,可以通过表3.1进行数据观察,在Fuzzy工具箱内将规则一条条输入进去,可以通过图3.14进行观察。举个例子,If E is PB and EC is ZO,then U is PB为一条规则。这句话代表的意思是若独轮车倾斜角度为正大,并且它的倾斜角速度=0,那么代表的是车子太多的向前倾斜,可是倾斜角度没有变化可能,所以对于控制器输出的要求是正大,可以让车体最快速度下回归平衡。
表3.1 模糊规则表
图3.14 Fuzzy 工具箱中输入模糊规则
根据模糊控制规得到系统输入量E和EC以及输出量U之间的特性曲面如图3.15
图3.15
6)模糊推理和解模糊
该控制器运用的推理方法是最大-最小推理方法。解模糊方法为重心法。结合以上阐述,Fuzzy工具箱组建的模糊控制器能够在电脑上实施仿真研究。
仿真实验
以上模糊控制器,以Simulink作出的独轮车模糊控制算法实施模拟,我们能够以图3.16来对其模糊控制算法框图进行模拟,对其控制效果实施观察。图中,Subsystem即电动独轮车的模拟图形,我们可以通过图2.6进行内部结构观察。
IPS电动独轮车常见问题 1.如何控制IPS电动独轮车? IPS电动独轮车是利用内置的高精密陀螺仪进行前后平衡稳定的,它的左右平衡与我们骑自行车的原理一样要靠一定的速度和您的身体来控制。当您身体前倾,IPS电动独轮车会感知到您的动作进行加速;当您身体后仰,IPS电动独轮车也会控制电机减速以维持您与车体的平衡。 2.初学者能够正常骑行大概需要多长时间? 大部分人可以在1~3天之内学会,每天大概花费2小时左右。刚学习时,因为重心偏离,会有小腿被磕痛的情况,使用护腿可极大改善。另外小部分人可能因为平衡感较差而学习较为缓慢,这是正常情况,请多多练习。购 买时建议搭配辅助轮,可以方便自己以及他人体验。 第1页
3.IPS电动独轮车的最大续航里程? 不同型号的IPS电动独轮车续航里程是不一样的。F400最大续航里程40Km,I200最大续航里程25Km。根据用户重量不同,路况不同,驾驶风格不同,距离会有所不同。 4.IPS电动独轮车的最高时速是多少? 同所有的自平衡车一样,IPS电动独轮车的自平衡能力有限,为了保证您的行驶安全,IPS电动独轮车通过软件限速,控制最高时速在16~18Km/h。 5.下雨天能否使用? 一般小雨天是可以短时间使用,禁止在大雨中或者积水比较多的路面行驶,也禁止在雨中长时间骑行。雨天路 滑,为了您的安全考虑,建议下雨天不要使用。 第2页
6.充电时间是多少?电池寿命? IPS电动独轮车的电池容量较高,所以充电时间较长,F400单次完全充满时间为4小时,电池容量较低的型号,充电时间较短。电池的寿命为完全充放电1500次左右。为了较好保养您的电池,请充满电后及时关闭电源,请尽量不要通宵充电。 7.快速骑行中IPS电动独轮车的“翘头”现象该如何解决? 工程师在IPS电动独轮车软件控制中加了限速程序,以保证使用者的安全。如果车子的行驶速度在12Km/h左右,他的限速控制软件就会启动,给驾驶者一个微微向后的力量,提醒驾驶者注意行驶速度,所以会让驾驶者感觉有“翘头”的现象。这种“翘头”现象是正常的,您可以通过调整身体重心,将身体重心略微后移即可。此时请不要 强制加速,以免摔倒。 第3页
模型组合讲解——先加速后减速模型 【模型概述】 物体先加速后减速的问题是运动学中典型的综合问题,也是近几年的高考热点,同学在求解这类问题时一定要注意前一过程的末速度是下一过程的初速度,如能画出速度图象就更明确过程了。 【模型讲解】 例. (2004年全国高考)一小圆盘静止在桌面上,位于一方桌的水平桌面的中央。桌布的一边与桌的AB 边重合,如图1所示。已知盘与桌布间的动摩擦因数为1μ,盘与桌面间的动摩擦因数为2μ。现突然以恒定加速度a 将桌布抽离桌面,加速度方向是水平的且垂直于AB 边。若圆盘最近未从桌面掉下,则加速度a 满足的条件是什么?(以g 表示重力加速度) 图1 解析:根据题意可作出物块的速度图象如图2所示。设圆盘的质量为m ,桌边长为L ,在桌布从圆盘下抽出的过程中,盘的加速度为1a ,有11ma mg =μ 图2 桌布抽出后,盘在桌面上做匀减速运动,以2a 表示加速度的大小,有22ma mg =μ 设盘刚离开桌布时的速度为1v ,移动的距离为1x ,离开桌布后在桌面上再运动距离2x 后便停下,由匀变速直线运动的规律可得: 11212x a v = ① 22212x a v = ② 盘没有从桌面上掉下的条件是:2 21L x x ≤+ ③ 设桌布从盘下抽出所经历时间为t ,在这段时间内桌布移动的距离为x ,有:
21122121t a x at x ==,,而2 1L x x =-,求得: 1a a L t -=,及1 111a a L a t a v -== 联立解得2121)2(μμμμg a +≥ 【模型特征】 “先加速后减速”模型的v-t 图象中速度为临界点,斜率为加速度、面积为位移。 处理“物体先加速后减速”问题的方法很多,我们可以根据已知条件采用三大定理处理,也可以根据图象快捷处理,借助图象法为我们更加清晰准确的采用全过程法提供了保证。 【热点图象】 直线运动的s-t 图;直线运动的v-t 图;平抛运动的y-x 图;机车启动的P-t 图;简谐运动的x-t 图;简谐波的y-x 图;受迫振动的共振曲线;电场线;磁感线;闭合电路的U-I 图;闭合电路的P 出-R 图;部分电路的U-I 图;分子力随距离变化的F 分-r 图;分子势能随距离变化的E P -r 图;电磁感应中的Φ-t 图;电磁感应中的I-t 图;光电效应中的E km -γ图。 识图要点: ①运用图象首先要搞清楚纵横轴所代表的物理量,明确要描述的是哪两个物理量之间的关系。如s-t 图象与v-t 图象在纵轴上的区别;简谐运动图象与简谐波的图象在横轴上的差异等。 ②图线并不表示物体实际运动的轨迹。如匀速直线运动的s-t 图象是一条斜向上的直线,但实际运动的轨迹可以是任意方向的。 ③了解图象的物理意义。从图象的形状看出物理过程,在很多情况下,写出物理量的解析式与图象对照,更有助于理解图象物理意义。 ④要特别关注图象中的“点”、“线”、“面”、“斜率”、“截距”等及其对应物理意义。“点”代表状态,描述物体在该状态下所具有的特征;“线”代表过程,描述物体在一段过程中随着横轴所代表的物理量的变化,纵轴代表物理量的变化情况;“面”指的是图线与横轴所围成的面积,表示纵轴所代表的物理量对横轴所代表的物理量的积累;“斜率”指的是x y x ??→?0lim ,当横轴为时间轴时,斜率表示纵轴所示物理量对时间的变化率;“截距”指的是图线与纵轴的交点,当横轴为时间轴时截距描述初态特征。 【模型演练】 (昆明市高中三年级统一检测)一个质量为m=0.2kg 的物体静止在水平面上,用一水平恒力F 作用在物体上10s ,然后撤去水平力F ,再经20s 物体静止,该物体的速度图象如图3所示,则下面说法中正确的是( ) A. 物体通过的总位移为150m B. 物体的最大动能为20J
独轮车的骑行感受和体验心得 第一次见到电动独轮车,是在公交车上,当时在十字路口已经堵了十分钟,心里烦烦的,看着窗外一个人踩着只有一个小轮的车穿过车流迅速就不见了,感觉非常神奇,但却不知道这种交通工具叫什么名字。之后我的室友买了一个飞沃的电动独轮车,我才知道这种神奇的交通工具其实是叫自平衡电动独轮车,又叫思维车火星车,是刚刚兴起的一种代步交通工具。 我是在校大学生,平时上课要穿过偌大的校园,有同学买了自行车代步,但是停放很成问题,搬来搬去的也非常不方便。室友的电动独轮车却很方便,速度不慢,重要的是不用寻找停车的地方,直接提去教室,也不用害怕被人偷走,比自行车要省心很多。于是我先拿来他的飞沃独轮车试着玩了下,说实话上车不大容易,看着他玩的那么溜,还以为学起来很简单呢。室友说他刚学的时候也是这样,但是学两三天就可以上手了,要坚持学习,跟学自行车的原理是一样的。 于是我们先到操场上,陪我练习学车,练习独轮车要在空旷平坦的场地,这样一来易于新手掌握,二来安全性比较高,没有心理负担。飞沃独轮车还配套送了辅助轮和辅助带,方便新手上手练习,但是室友认为这样只会造成对辅助轮的依赖,对学车没有好处,所以一开始就没有让我用。一开始车子老是不受控制,踩在脚上会前后左右偏向,我重复试了很多次都是这样,都有点打退堂鼓了,室友就演示给我看,首先不要急着上车,先学会控车和溜车,学会控制好车,不要让车左右偏离不受控制。然后试着另一只脚踏上踏板,室友扶着我慢慢寻找平衡,熟悉感觉,逐渐放开手自己往前走,从一开始的只能走一两米到可以自己转弯,再到可以顺利地骑行,利用课余时间练习,一共花了两天的时间。 学会了车,下面说一下我的骑行感受和体验心得,飞沃独轮车这款T2的132骑行起来比较稳,爬坡力度也不错,大部分的坡度不成问题,充一次电一个小时,可以用很久,续航20公里,没有虚标问题,像众多独轮车一样,长时间骑行小腿会疼,所以一定要贴防撞条,慢慢习惯就好。飞沃还有另一种210的型号,续航35公里,更加适合长途代步的用户需要。如果对于学生党的话,T2的机型已经算性价比很高的了,飞沃还有其他四款机型,有蓝牙的也有双轮的,改天去工厂拿台玩下,再反馈给大家吧。 现在我每天都用电动独轮车代步,出行全靠它,真的非常方便又省时,前几天下雨被淋了也没有坏,樱花轮胎,防滑性很好,质量的确经得起考量的。 目前绿色出行越来越受到人们的关注,电动独轮车这么环保的产品相信也会发展的越来越好。
电动平衡车品牌排行 电动平衡车因其小巧方便、环保著称,电动平衡车也迅速成为大家的新宠,而目前电动平衡车品牌众多,而品牌与品牌之间也各有千秋,许多年轻人想拥有一款电动独轮车,但却不知道电动独轮车什么牌子好,很多人关注的主要在于电动平衡车的质量、价格以及安全性等方面。今天笔者为大家分享一些电动平衡车什么牌子好。 一、AIRWHEEL(常州爱尔威科技有限公司) 创立于美国,作为世界范围内的便携式自平衡电动车行业的领导品牌,常州爱尔威科技有限公司,市场占有率60%,产品热销海内外,电动平衡车领袖品牌。 二、SOLOWHEEL(英凡蒂(北京)科贸有限公司) 创立于美国,全球可穿戴代步装备行业开创者,自平衡电动独轮车先行者,英凡蒂(北京)科贸有限公司,市场占有率一般,因其价格昂贵原因,没能普遍的被大众接受。 三、Segway赛格威(纳恩博(天津)科技有限公司) 始于美国,全球创新短交通行业的领导者,国内自平衡车的提供商之一,纳恩博(天津)科技有限公司,因为其价格昂贵,所以占有率相当小,质量还是不错的。 四、奥捷骑(浙江同硕科技有限公司) 中国最早的智能平衡车供应商之一,智能机器人交通工具领航者,平衡车领先品牌,浙江同硕科技有限公司,因为其产品用户体验度、价格等原因,导致其市场占有率一般。 五、易步Robstep(东莞易步机器人有限公司) 专注于智能机器人研发/制造/销售及技术服务于一体的高科技企业,知名品牌,东莞易步机器人有限公司,市场占有率也是一般。 六、新世纪i-robot(上海新世纪机器人有限公司) 致力于新能源机器人的研发/生产/销售,拥有自主知识产权的新型科技企业,上海新世纪机器人有限公司,市场占有率一般般。 七、乐行Inmotion(深圳乐行天下科技有限公司) 致力于体感车研发/生产/销售的一体化科技企业,行业最具成长性企业之一,深圳乐行天下科技有限公司,市场占有率还可以,但是不能和爱尔威相比。 八、IPS(上海不倒翁投资有限公司) 国内较早致力于自平衡电动车研发/生产/销售的企业,电动独轮车行业领先品牌,上海不倒翁投资有限公司,市场占有率不多。
模型组合讲解——先加速后减速模型 汪华 【模型概述】 物体先加速后减速的问题是运动学中典型的综合问题,也是近几年的高考热点,同学在求解这类问题时一定要注意前一过程的末速度是下一过程的初速度,如能画出速度图象就更明确过程了。 【模型讲解】 例. (2004年全国高考)一小圆盘静止在桌面上,位于一方桌的水平桌面的中央。桌布的一边与桌的AB 边重合,如图1所示。已知盘与桌布间的动摩擦因数为1μ,盘与桌面间的动摩擦因数为2μ。现突然以恒定加速度a 将桌布抽离桌面,加速度方向是水平的且垂直于AB 边。若圆盘最后未从桌面掉下,则加速度a 满足的条件是什么?(以g 表示重力加速度) 图1 解析:根据题意可作出物块的速度图象如图2所示。设圆盘的质量为m ,桌边长为L ,在桌布从圆盘下抽出的过程中,盘的加速度为1a ,有11ma mg =μ 图2 桌布抽出后,盘在桌面上做匀减速运动,以2a 表示加速度的大小,有22ma mg =μ 设盘刚离开桌布时的速度为1v ,移动的距离为1x ,离开桌布后在桌面上再运动距离2x 后便停下,由匀变速直线运动的规律可得: 11212x a v = ① 22212x a v = ② 盘没有从桌面上掉下的条件是:221L x x ≤ + ③ 设桌布从盘下抽出所经历时间为t ,在这段时间内桌布移动的距离为x ,有:
21122121t a x at x ==,,而2 1L x x =-,求得: 1a a L t -=,及1 111a a L a t a v -== 联立解得2121)2(μμμμg a +≥ 【模型特征】 “先加速后减速”模型的v-t 图象中速度为临界点,斜率为加速度、面积为位移。 处理“物体先加速后减速”问题的方法很多,我们可以根据已知条件采用三大定理处理,也可以根据图象快捷处理,借助图象法为我们更加清晰准确的采用全过程法提供了保证。 【热点图象】 直线运动的s-t 图;直线运动的v-t 图;平抛运动的y-x 图;机车启动的P-t 图;简谐运动的x-t 图;简谐波的y-x 图;受迫振动的共振曲线;电场线;磁感线;闭合电路的U-I 图;闭合电路的P 出-R 图;部分电路的U-I 图;分子力随距离变化的F 分-r 图;分子势能随距离变化的E P -r 图;电磁感应中的Φ-t 图;电磁感应中的I-t 图;光电效应中的E km -γ图。 识图要点: ①运用图象首先要搞清楚纵横轴所代表的物理量,明确要描述的是哪两个物理量之间的关系。如s-t 图象与v-t 图象在纵轴上的区别;简谐运动图象与简谐波的图象在横轴上的差异等。 ②图线并不表示物体实际运动的轨迹。如匀速直线运动的s-t 图象是一条斜向上的直线,但实际运动的轨迹可以是任意方向的。 ③了解图象的物理意义。从图象的形状看出物理过程,在很多情况下,写出物理量的解析式与图象对照,更有助于理解图象物理意义。 ④要特别关注图象中的“点”、“线”、“面”、“斜率”、“截距”等及其对应物理意义。“点”代表状态,描述物体在该状态下所具有的特征;“线”代表过程,描述物体在一段过程中随着横轴所代表的物理量的变化,纵轴代表物理量的变化情况;“面”指的是图线与横轴所围成的面积,表示纵轴所代表的物理量对横轴所代表的物理量的积累;“斜率”指的是x y x ??→?0lim ,当横轴为时间轴时,斜率表示纵轴所示物理量对时间的变化率;“截距”指的是图线与纵轴的交点,当横轴为时间轴时截距描述初态特征。 【模型演练】 (昆明市高中三年级统一检测)一个质量为m=0.2kg 的物体静止在水平面上,用一水平恒力F 作用在物体上10s ,然后撤去水平力F ,再经20s 物体静止,该物体的速度图象如图3所示,则下面说法中正确的是( ) A. 物体通过的总位移为150m B. 物体的最大动能为20J
大班体育游戏教案好玩的独轮车(双手持物保持平衡) 活动目标: 1、利用各种小型器械玩独轮车,提高双手持物保持平衡的能力。 2、通过自由尝试、迁移同伴的经验探索更多的玩法,借助节奏快慢的音乐控制自己开车的速度,并根据标记(箭头、点子)掌握运动路线及拜访物品。 3、体验与同伴、教师合作的乐趣,努力遵守集体练习时“一个接着一个”的规则。 活动准备: 独轮车8辆、瓶子16个、拱门4个、平衡木4根; 音乐磁带或CD《单簧管波尔卡》、《瑶族舞曲》、录音机; 低上贴好数字1、2、3、4、及标记箭头、点子; 幼儿在活动前编好自己的号码1、2、3、4。 活动过程: 一、幼儿两两合作(一人拉车、一人推车)带着车子进场,跟着音乐的快慢变化车速。音乐停,幼儿根据教师的手势交换推车与拉车的角色。 二、进游乐场自选平衡木、雪碧瓶子、拱门进行游戏。 三、幼儿在场地一边集合,说说自己的玩法。 四、幼儿迁移同伴的玩法,再次尝试练习。 五、集体游戏:累加障碍:拱门,单组一次循环。 六、教师与客人合作。
爱心手语 活动目标: 1、初步学习用手语关爱聋哑人,体验爱与被爱的情感交流。 2、知道通过手的不同动作可以表达多种情感,感知他们他们的非言语交往和表达方式。 活动准备:电脑一台、课件 活动过程: 一、看手语图片,引入活动T:小朋友,今天老师要和你们一起学习一样新的本领,看,图片上的阿姨在干什么?对了,这个阿姨是在做手势,你知道这手势是做给谁看的?小结:聋哑人和我们一样也需要交流,他们听不到、也说不出来,只好用手势做手语和别人交流。 二、初步认识手语你们会做手语吗?老师做几个让你们猜一猜。(教师示范:你、我、他、哭)今天老师还帮你们请来了一位小熊教授,请他来教你们做手语。播放小熊FLASH学习:你好、早上好、我爱你、等等三、讲述故事,有帮助聋哑人的想法教师配乐讲述:出现小女孩的图片(有一个天生失语的小女孩,爸爸在她很小的时候就去世了,她和妈妈相依为命。妈妈每天很早出去工作,很晚才回来。每到日落时分,小女孩就站在家门口,充满期待地望着门前的那条路,等妈妈回家。妈妈回来的时候是她一天中最快乐的时候,因为妈妈每天都要给她带一块年糕回家。在她们贫穷的家里,一块小小的年糕就是无上的美味了啊!有一天,下着很大的雨,已经过了晚饭的时间了,妈妈却还没有回来。小女孩站在家门口望啊望啊,总也等不到妈妈的身影。天,越来越黑,雨,越下越大,小女孩决定顺着妈妈每天回来的路自己去找妈妈。她走啊走啊,走了很远,终于在路边看见了倒在地上的妈妈。她使劲摇着妈妈的身体,妈妈却没有回答她。她以为妈妈太累睡着了,就把妈妈的头枕在自己的腿上,想让妈妈睡得舒服一点。但是这时她发现,妈妈的眼睛没有闭上!小女孩突然明白:妈妈可能已经死了!她感到恐惧,拉过妈妈的手使劲摇晃,却发现妈妈的手里还紧紧地撰着一块年糕......她拼命地哭着,却发不出一点声音......)T:如果你遇到这个小女孩,想不想帮助她?你想怎么帮助她?可她是个聋哑人,听不到你们说的话,对了,我们可以
一、安全须知 所带来的人身伤害。为了确保您的行车安全,请完整且仔细地阅读本说明书 中的全部说明和注意事项。 注意:尽管本说明书能够帮助您更好地了解和使用IPS,但是我们不能 确保所有的紧急事故类型都包括在内。因此,我们提醒您小心驾驶,确保您 的行车安全。 1.使用范围 IPS自平衡电动独轮车是户外运动产品,并非交通工具。IPS用户只能在空旷平坦的区域骑行,严禁在非机动车 道上骑行!严禁在机动车道上骑行! 第1页
IPS用户在非机动车道和任何机动车道上骑行,一旦发生交通事故,有可能对您造成人身伤害! 2.骑行必须佩戴护具 任何时候,请佩戴头盔,护膝,护肘等各种安全护具。不佩戴安全护具,有可能对您造成人身伤害! 3.未成年人需在监护人陪同下使用IPS自平衡电动独轮车,避免造成事故。 4.请使用原装充电器充电 请使用产品原装的充电器进行充电。不可使用IPS其他型号的充电器,更不可使用其他厂家的充电器进行充电。 因未使用原装充电器而造成的任何后果,上海不倒翁投资有限公司将不承担任何责任。 第2页
二、IPS产品结构 1)IPS自平衡电动独轮车外壳 2)电源开关 3)指示灯 4)充电器插口 5)脚踏板 出厂包装含:IPS自平衡电动独轮车一台、充电器一部、手带一条、使用说明书等。 三、指示灯含义 绿色常亮和绿色闪烁: 第3页
1)绿灯常亮:表明当前电量大于67%,您可以放心使用。 2)绿灯闪烁:当闪烁频率较低(约1秒1次),表明当前电量低于67%并且高于33%; 当闪烁频率较高(约1秒5次),表明当前电量低于33%,应该注意充电; 红色: 表明电池量低,需充电。 红色灯闪烁: 1)表明IPS处于危险状态,需立即停车并关闭电源。 2)充满电后打开电源,如果故障没有消除的话,请送至指定维修地点进行检测维修。 第4页
专题7.2、动力学之三大基本模型 题型一、过程分析之板块模型 由滑块和木板组成的相互作用的系统一般称之为“木板—滑块模型”,简称'板块模型'。 此类问题涉及的相关知识点包括:静摩擦力、滑动摩擦力、运动学规律、牛顿运动定律、动能定理、能量转化与守恒等多方面的知识。此类问题涉及的处理手段包括:受力分析、运动分析、临界条件判断、图像法处理、多过程研究等多种方法。因此对大家的综合分析能力要求极高,也是高考的热点之一。 “滑块——木板”模型 【解题方略】 两种类型如下: 木板 条件是物块恰好滑到木板左端时二者速度相等,则位 移关系为 物块 条件是物块恰好滑到木板右端时二者速度相等,则位 移关系为 例1、如图所示,质量为M=8kg的小车放在光滑的水平面上,在小车左端加一水平推力F=8N,当小车向右运动的速度达到v0=1.5m/s时,在小车前端轻轻放上一个大小不计、质量为m=2kg的小物块,物块与小车间的动摩擦因数μ=0.2。已知运动过程中,小物块没有从小车上掉下来,取g=10m/s2。求: (1)经过多长时间两者达到相同的速度; (2)小车至少多长,才能保证小物块不从小车上掉下来; (3)当小车与物块达到共速后在小车合物块之间是否存在摩擦力? (4)从小物块放上小车开始,经过t=1.5s小物块通过的位移大小为多少; (5)二者共速后如果将推力F 增大到28N ,则二者的加速度大小分别为; 【答案】(1)1s.(2)0.75m. (3)有,1.6N .(4)2.1m (5)2m/s2. 8m/s2 【解析】
对木块受力分析得:)1...(1ma mg =μ 对小车受力分析得:)2...(2Ma mg F =-μ 解得: ... /5.0.../22 221s m a s m a == 分别对两车进行运动分析:假设经过时间t 两车达到共速,且达到共速时物块恰好到达木板的左端; 对物块: ) 4...(2 1) 3...(2 1111t a x t a v == 对小车: ) 4...(2 1 ) 5...(2202202t a t v x t a v v +=+= 根据题意: ) 6...()5...(2121l x x v v v =-==共 联立1、2、3、4、5、6式得:t=1s , l=0.75,v 共=2m/s (3)当物块与小车共速后对整体受力分析: 2 /8.0)7...()(s m a a m M F =+= 此时小车与物块之间的摩擦力转化为静摩擦力,隔离物块对物块受力分析得:N ma f 6.18.02=?==。 所以当二者共速后在小车物块之间存在静摩擦力大小为:1.6N . (4)二者共速后将以0.8m/s 2的加速度继续前进,所以在1.5s 内物块经历了两段运动(0-1s 与1-1.5s ),对物块进行运动分析得: )8...(/11x x x += 代入参数得:m x 1122 1 21=??= , m x 1.15.08.02 1 5.022/1=??+?= m x 1.2= (5)当外力F 增加到28N 时,需要先判断,物块与小车之间是否发生相对运动是处理该问的关键; 设:当外力F 增大到F0时。小车与物块之间刚好发生相对运动,此时AB 之间的静摩擦力达到最大值;结合叠加体临界问题的求解方法(见专题06)可得:
瑞巴途智能电动平衡车的6大优势 1.自动平衡?代步首选 瑞巴途智能电动平衡独轮车是新一代的节能、环保、便携式代步工具,采用电能驱动,无污染,绿色环保;采用倒力摆自平衡系统,和动态平衡理念设计,自平衡设计让骑行者更安全,可控的速度,成为了短途代步出行的最理想工具。 2.千变万化?炫酷时尚 瑞巴途智能电动平衡独轮车有着精致新颖、时尚靓丽的流线型外观与鲜艳多姿的色彩,通过摆动身驱来控制车辆的转弯与速度,让人们在玩乐的同时,既能学会对车辆熟练驾控的同时起到健身功能,又能满足人们的虚荣与攀比心理。 3.科学设计?益智运动 瑞巴途智能电动平衡独轮车将人体工程学与运动学完美结合,将健身合理化融入其中,汇聚多种功能,集休闲、娱乐、运动、健身、益智为一体。锻炼人们的运动协调能力,迅速提高骑行者的应变能力,促进身体和大脑发育。 4.质量保证?安全无忧 瑞巴途智能电动平衡独轮车,内置重力感应陀螺仪,根据骑行者重量自动平衡,智能行驶速度保护功能,为您提供更安全的行驶保护。产品已通过国家权威机构质量和安全检测,并已申请相关专利,具有可靠的运动安全性。 5.时尚轻颖?携带方便 瑞巴途智能电动平衡独轮车体形小巧、携带方便,可随身携带到家中或办公室,也可以直接放进汽车后备箱,作为一种新型环保的代步及运动休闲工具,骑行者在秀出自己个性的同时,可有效地缓解资源消耗和空气污染。 6.简单易学?玩法精彩 瑞巴途智能电动平衡独轮车操作简单,一玩就会只需按照说明书的指导,不超过10分钟即能学会,40分钟内可以熟练掌控。玩法千变万化,可单独玩,可和朋友们一起玩,还可进行比赛和表演,乐趣无穷,是朋友间娱乐必不可少的知心伙伴。
电动独轮车运动原理皆在此 当你收到心爱的爱车时,是不是对它了解不够深刻,所以你的爱车总是与你闹脾气,不让你好好地控制它,还老是让你觉得,丈二和尚,摸不着头脑。其实不管是酷车e族的电动独轮车还是别的品牌的独轮车都与普通独轮车一样,但也有所不同,电动独轮车系统更复杂,更先进。我们知道车要走,当然就是轮子转动实现的。而控制车轮就是一项技术活了。车轮通过电机经由齿轮箱驱动,因此通过控制电机转速可以实现对车轮的运动控制。电机运动控制是通过控制电机线圈上的电流实现的。控制电机电流,就控制了电机的输出力量。~\(≧▽≦)/~啦啦啦啦啦,让我们一起来了解一下电动独轮车的运动原理吧。 一、电动独轮车简介 电动独轮车是一种依靠电力驱动、内置陀螺仪与驱动电路控制平衡、采用身体重心控制速度、具有自我平衡能力的一种新型代步工具。就拿酷车e族的电动独轮车来举个例子。 酷车e族这一款电动独轮车品牌的投影面积其实不比人类大多少并且机动性很高,因此它的电动独轮车可以到达人步行能到达的大部分路面,包括小路、人行道、楼道、室内和电梯内。这就让它成为介于汽车和步行之间的一个非常好的代步工具。一切步行太远,开车太近的地方,它的电动独轮车都能让您轻松到达。 二、电动独轮车物理原理 而它的电动独轮车内置陀螺仪传感器,利用该传感器,车载驱动电路上的CPU会以每秒200次的速度计算车身的前后平衡,如果身体重心向前倾斜,前方数值大于后方,此时CPU就会发出指令给驱动电路上的传感器,调整电机转动方向与速度,让电机向后方转动,车辆向前,反之,车辆向后,身体向前倾斜的越厉害,速度就越快;而向左和向右倾斜身体是转弯 三、产品特点
模型组合讲解一一先加速后减速模型 汪华 【模型概述】 物体先加速后减速的问题是运动学中典型的综合问题,也是近几年的高考热点,同学在 求解这类问题时一定要注意前一过程的末速度是下一过程的初速度,如能画出速度图象就更 明确过程了。 【模型讲解】 例.(2004年全国高考)一小圆盘静止在桌面上,位于一方桌的水平桌面的中央。桌布的一边与桌的AB边重合,如图1所示。已知盘与桌布间的动摩擦因数为1,盘与桌面间 的动摩擦因数为2。现突然以恒定加速度a将桌布抽离桌面,加速度方向是水平的且垂直 于AB边。若圆盘最近未从桌面掉下,则加速度a满足的条件是什么?(以g表示重力加速 度) 解析:根据题意可作出物块的速度图象如图2所示。设圆盘的质量为m,桌边长为L, 2mg ma2设盘刚离开桌布时的速度为v i,移动的距离为便停下, 由匀变速直线运动的规律可得: X i,离开桌布后在桌面上再运动距离X2后 2 小 v i2a i x i 2 V i 2a2X2 盘没有从桌面上掉下的条件是: X i L X2 2 桌布抽出后,盘在桌面上做匀减速运动,以a2表示加速度的大小,有 设桌布从盘下抽出所经历时间为t,在这段时间内桌布移动的距离为X,有:
联立解得( 1 2 2 ) ig 2 【模型特征】 “先加速后减速”模型的 v-t 图象中速度为临界点,斜率为加速度、面积为位移。 处理“物体先加速后减速”问题的方法很多,我们可以根据已知条件采用三大定理处理, 也可以根据图象快捷处理,借助图象法为我们更加清晰准确的采用全过程法提供了保证。 【热点图象】 直线运动的s-t 图;直线运动的 v-t 图;平抛运动的y-x 图;机车启动的 P-t 图;简谐运 动的x-t 图;简谐波的y-x 图;受迫振动的共振曲线;电场线;磁感线;闭合电路的 U-I 图; 闭合电路的P 出-R 图;部分电路的 U-I 图;分子力随距离变化的 F 分-r 图;分子势能随距离 变化的E p -r 图;电磁感应中的①-t 图;电磁感应中的l-t 图;光电效应中的 E km -丫图。 识图要点: ① 运用图象首先要搞清楚纵横轴所代表的物理量,明确要描述的是哪两个物理量之间的 关系。如s-t 图象与 v-t 图象在纵轴上的区别;简谐运动图象与简谐波的图象在横轴上的差 ② 图线并不表示物体实际运动的轨迹。如匀速直线运动的 s-t 图象是一条斜向上的直线, 但实际运动的轨迹可以是任意方向的。 ③ 了解图象的物理意义。从图象的形状看出物理过程,在很多情况下,写出物理量的解 析式与图象对照,更有助于理解图象物理意义。 ④ 要特别关注图象中的 “点”、“线”、“面”、“斜率”、“截距”等及其对应物理意义。“点” 代表状态,描述物体在该状态下所具有的特征; “线”代表过程,描述物体在一段过程中随 着横轴所代表的物理量的变化,纵轴代表物理量的变化情况; “面”指的是图线与横轴所围 成的面积,表示纵轴所代表的物理量对横轴所代表的物理量的积累; “斜率”指的是lim y , x 0 x 当横轴为时间轴时,斜率表示纵轴所示物理量对时间的变化率; “截距”指的是图线与纵轴 的交点,当横轴为时间轴时截距描述初态特征。 【模型演练】 (昆明市高中三年级统一检测)一个质量为 m=0.2kg 的物体静止在水平面上,用一水平 恒力F 作用在物体上10s ,然后撤去水平力 F ,再经20s 物体静止,该物体的速度图象如图 3所示,则下面说法中正确的是( ) A. 物体通过的总位移为 150m B. 物体的最大动能为 20J 1 at 2, x i 2 -a i t 2,而 x x i 2 2,求得: 及v 1 a -t a j — \ a a 1
模型组合讲解——回旋加速模型 [模型概述] 带电粒子在电磁场中的运动是每年高考中的热点问题,考查内容或电场对带电粒子的加速(减速),或磁场对带电粒子的偏转(回旋),或两者结合考查学生的综合能力。 [模型讲解] 1.回旋加速器解读 例1.(2005天津高考)正电子发射计算机断层(PET )是分子水平上的人体功能显像的国际领先技术,它为临床诊断和治疗提供全新的手段。 (1)PET 在心脏疾病诊疗中,需要使用放射正电子的同位素氮13示踪剂,氮13是由小型回旋加速器输出的高速质子轰击氧16获得的,反应中同时还产生另一个粒子,试写出该核反应方程。 (2)PET 所用回旋加速器示意如图1,其中置于高真空中的金属D 形盒的半径为R ,两盒间距为d ,在左侧D 形盒圆心处放有粒子源S ,匀强磁场的磁感应强度为B ,方向如图所示。质子质量为m ,电荷量为q 。设质子从粒子源S 进入加速电场时的初速度不计,质子在加速器中运动的总时间为t (其中已略去了质子在加速电场中的运动时间),质子在电场中的加速次数于回旋半周的次数相同,加速质子时的电压大小可视为不变。求此加速器所需的高频电源频率f 和加速电压U 。 图1 (3)试推证当d R >>时,质子在电场中加速的总时间相对于在D 形盒中回旋的时间可忽略不计(质子在电场中运动时,不考虑磁场的影响)。 解析: (1)核反应方程为:He N H O 4 213711168+→+ ① (2)设质子加速后最大速度为v ,由牛顿第二定律得: R v m qvB 2 = ② 质子的回旋周期为:qB m v R T ππ22== ③ 高频电源的频率为:m qB T f π21== ④ 质子加速后的最大动能为:2 2 1mv E k = ⑤ 设质子在电场中加速的次数为n ,则: nqU E k = ⑥ 又2 T n t = ⑦ 可解得:t BR U 22 π= ⑧
专题强化四动力学中三种典型物理模型 专题解读 1.本专题是动力学方法在三类典型模型问题中的应用,其中等时圆模型常在选择题中考查,而滑块—木板模型和传送带模型常以计算题压轴题的形式命题. 2.通过本专题的学习,可以培养同学们的审题能力、建模能力、分析推理能力和规范表达等物理学科素养,针对性的专题强化,通过题型特点和解题方法的分析,能帮助同学们迅速提高解题能力. 3.用到的相关知识有:匀变速直线运动规律、牛顿运动定律、相对运动的有关知识. 1.两种模型(如图1) 图1 2.等时性的证明 设某一条光滑弦与水平方向的夹角为α,圆的直径为d,如图1所示.根据物体沿光滑弦做初速度为零的匀加速直线运动,加速度为a=g sin α,位移为x=d sin α,所以运动时间为t0 =2x a= 2d sin α g sin α= 2d g. 即沿同一起点或终点的各条光滑弦运动具有等时性,运动时间与弦的倾角、长短无关. 例1(2019·安徽芜湖市期末)如图2所示,PQ为圆的竖直直径,AQ、BQ、CQ为三个光滑斜面轨道,分别与圆相交于A、B、C三点.现让三个小球(可以看作质点)分别沿着AQ、BQ、CQ轨道自端点由静止滑到Q点,运动的平均速度分别为v1、v2和v3.则有:() 图2 A.v2>v1>v3 B.v1>v2>v3 C.v3>v1>v2
D.v1>v3>v2 答案 A 解析设任一斜面的倾角为θ,圆槽直径为d.根据牛顿第二定律得到:a=g sin θ,斜面的长 度为x=d sin θ,则由x=1 2at 2得t=2x a=2d sin θ g sin θ =2d g ,可见,物体下滑时间与斜面的 倾角无关,则有t1=t2=t3,根据v=x t ,因x2>x1>x3,可知v2>v1>v3,故选A. 变式1如图3所示,竖直半圆环中有多条起始于A点的光滑轨道,其中AB通过环心O 并保持竖直.一质点分别自A点沿各条轨道下滑,初速度均为零.那么,质点沿各轨道下滑的时间相比较() 图3 A.无论沿图中哪条轨道下滑,所用的时间均相同 B.质点沿着与AB夹角越大的轨道下滑,时间越短 C.质点沿着轨道AB下滑,时间最短 D.轨道与AB夹角越小(AB除外),质点沿其下滑的时间越短 答案 A 1.水平传送带模型 项目图示滑块可能的运动情况 情景1 ①可能一直加速 ②可能先加速后匀速 情景2 ①v0>v,可能一直减速,也可能先减速再匀速 ②v0=v,一直匀速 ③v0 2 自平衡独轮车动力学模型的建立 2.1 自平衡的原理 动态平衡原理即为自平衡独轮车的工作原理。通过运动补偿算法,运用加速度传感器和陀螺仪对车体姿态测试,同时借助精密的伺服控制系统高敏地对电机进行驱动,并作适度的调节,从而使整个车体的平衡性以及稳定性得到确保。由图 2.1能够得出,自平衡独轮车的车体摆动和它的转动是存在一定分离性的,驾驶人员的两腿将车身的两端夹紧,进而和车体产生了一个整体。一旦其身体倾向后方,那么驱动车轮就会朝后转,从而防止车体倒向后方;反之,若是朝前,那么车轮就会朝钱转;若其身体处于竖直状态,那么则独轮车也就表现为动态平衡。独轮车控制系统的重中之重就是平衡控制。就自平衡独轮车加以建模并做深度分析,便能够对系统的特性产生更多的了解,这对于相应控制算法的设计规划甚为有益。 图2.1 2.2动力学建模 2.2.1 物理模型化简 自平衡独轮车不是平面机构,需要采用空间坐标的方式对其进行分析,坐标定义可详见图2.2,能够看出其自由度共有6个,其中平移、旋转各为3个。俯仰角Ψ、横滚角γ、偏航角Φ均为其旋转姿态角。因为独轮车的左右方向以驾驶者自身的调节为主,只能够控制前方和后方,故而把模型简单化至x o z平面,仅对这两个方向上的平衡控制进行探讨。 图2.2 运动学是力学的一个分支,主要是站在几何的视角上来对物体位置伴随时间的波动规律进行阐述及探究的,刚体的运动学以对其自身的运动特性的研究为主,譬如转动经过、位移、角速度及其加速度等。由于有部分难以测得的因素存在于独轮车的机械零件以及运动经过当中,因而必须对其做简化建模,因此作如下假设: 1驾驶者和独轮车运动相同,可将二者看成一个整体,假定是刚体; 2行走轮为质心在圆心的空心圆环; 3在独轮车行驶期间,车轮和地面从始至终都处于彼此接触的状态,且一直是纯滚动; 4忽略其他摩擦和外界干扰。 基于以上条件,我们进行独轮车物理模型化简如图 2.3,Φ为车轮转过的角度,θ为车体的倾角。 图2.3 为了方便建模,我们做出了参数定义如表2.1 表2.1 在环境模拟试验中,常常会遇到这样一个问题:产品在可控的试验箱环境中测试若干小时相当于产品在实际使用条件下使用多长时间?这是一个亟待解决的问题,因为它的意义不仅仅在于极大地降低了成本,造成不必要的浪费,也让测试变得更具目的性和针对性,有利于测试人员对全局的掌控,合理进行资源配置。 在众多的环境模拟试验中,温度、湿度最为常见,同时也是使用频率最高的模拟环境因子。实际环境中温度、湿度也是不可忽略的影响产品使用寿命的因素。所以,迄今将温度、湿度纳入考量范围所推导出的加速模型在所有的老化测试加速模型中占有较大的比重。由于侧重点的不同,推导出的加速模型也不一样。下面,本文将解读三个极具代表性的加速模型。 模型一.只考虑热加速因子的阿伦纽斯模型(Arrhenius Mode) 某一环境下,温度成为影响产品老化及使用寿命的绝对主要因素时,采用单纯考虑热加速因子效应而推导出的阿伦纽斯模型来描述测试,其预估到的结果会更接近真实值,模拟试验的效果会更好。此时,阿伦纽斯模型的表达式为: AF=exp{(E a /k)·[(1/T u )-(1/T t )]} 式中: AF是加速因子; E a 是析出故障的耗费能量,又称激活能。不同产品的激活能是不一样的。一 般来说,激活能的值在0.3ev~1.2ev之间; K是玻尔兹曼常数,其值为8.617385×10-5; T u 是使用条件下(非加速状态下)的温度值。此处的温度值是绝对温度值,以K(开尔文)作单位; T t 是测试条件下(加速状态下)的温度值。此处的温度值是绝对温度值,以K(开尔文)作单位。 案例:某一客户需要对产品做105℃的高温测试。据以往的测试经验,此种 产品的激活能E a 取0.68最佳。对产品的使用寿命要求是10年,现可供测试的样品有5个。若同时对5个样品进行测试,需测试多长时间才能满足客户要求? 已知的信息有T t 、E a ,使用的温度取25℃,则先算出加速因子AF: AF=exp{[0.68/(8.617385×10-5)]·【[1/(273+25)]- [1/(273+105)]】} 敬请登录网站在线投稿2017年第3期 75 载人自平衡电动独轮车的控制系统设计 叶秀敏,魏巍 (杭州电子科技大学电子信息学院,杭州310018) 摘要:针对电动独轮车的载人自平衡功能,建立电动独轮车控制系统,设计控制系统的硬件和软件。硬件部分主要由以STM32单片机为核心的控制系统、M PU6050姿态感知系统、电机驱动系统和直流无刷电机等模块组成。软件部分是在KEIL软件平台下采用C语言编写程序,主要实现对采集到的姿态数据进行卡尔曼滤波处理、PID控制算法以及电机驱动等功能。研究结果表明,电动独轮车具有较好的载人自平衡效果。 关键词:电动独轮车;自平衡;卡尔曼滤波;PID控制算法 中图分类号:T P13文献标识码:A ControlSystemofManRidingSelf‐balancingElectricUnicycle YeXiumin,WeiWei (College of Electronic Information,Hangzhou Dianzi University,Hangzhou310018,China) Abstract:Aiming at the riding and self‐balancing function of electric unicycle,the electric unicycle control system is established,and the hardware and software of the control system are designed.The hardware parts include the control system using the STM32MCU,the M PU6050attitude perception system,the motor drive system and the brushless DC motor.The software is programed on the KEIL soft‐ware platform,which using C language.The collected attitude data is applied with Kalman filter,the PID control algorithm and motor drive are achieved by the program.The research results show that the electric unicycle has better self‐balancing effect. Keywords:electric unicycle;self‐balancing;Kalman filter;PID control algorithm 引言 由于近年来汽油价格的显著提高和化石燃料造成的全球变暖问题,许多节能环保的轻量级交通工具应运而生。例如,电动自行车和电动汽车已经被广泛用于人们的短途运输中。作为一种新型的智能代步工具,载人自平衡电动独轮车也逐渐出现在人们的生活中,这是一种仅靠直流电机驱动的、结构紧凑的、由软件控制的机电一体化产品[1‐2]。载人自平衡电动独轮车可以被看作是一种特殊的轮式移动倒立摆,通过驱动车轮来实现自我平衡。通过骑行者重心前后移动实现独轮车向前和向后运动,而左右方向的平衡则通过身体来控制。 1系统结构 图1解释了骑行电动独轮车的工作原理,如果骑手向前倾斜,电动独轮车将向前运动以保持骑手的身体不倾倒。同样,如果骑手向后倾斜,电动独轮车将向后运动以保持骑手的稳定。 电动独轮车的系统框图如图2所示 ,控制模块采用 图1骑行电动独轮车示意图 STM32单片机来执行自平衡控制算法。姿态检测模块采用M PU6050六轴传感器,其整合了陀螺仪和加速度传感器。传感器检测倾角信号和角速度信号,在单片机内部经过一系列控制算法,最终输出控制信号给驱动模块,以驱动电机转动。 2硬件系统设计 2.1电压变换模块 电压变换模块包含3个子部分,分别是60V转15V 电压变换电路、15V转5V电压变换电路、5V转3.3V电压变换电路。60V转15V电压变换电路采用串联型稳压电路[3],将60V锂电池的输入电压转换成15V的输出电 万方数据自平衡独轮车动力学模型的建立
常用三种加速老化测试模型
载人自平衡电动独轮车的控制系统设计
相关主题
文本预览