最小二乘法及其应用 1. 引言 最小二乘法在19世纪初发明后,很快得到欧洲一些国家的天文学家和测地学家的广泛关注。据不完全统计,自1805年至1864年的60年间,有关最小二乘法的研究论文达256篇,一些百科全书包括1837年出版的大不列颠百科全书第7版,亦收入有关方法的介绍。同时,误差的分布是“正态”的,也立刻得到天文学家的关注及大量经验的支持。如贝塞尔( F. W. Bessel, 1784—1846)对几百颗星球作了三组观测,并比较了按照正态规律在给定范围内的理论误差值和实际值,对比表明它们非常接近一致。拉普拉斯在1810年也给出了正态规律的一个新的理论推导并写入其《分析概论》中。正态分布作为一种统计模型,在19世纪极为流行,一些学者甚至把19世纪的数理统计学称为正态分布的统治时代。在其影响下,最小二乘法也脱出测量数据意义之外而发展成为一个包罗极大,应用及其广泛的统计模型。到20世纪正态小样本理论充分发展后,高斯研究成果的影响更加显著。最小二乘法不仅是19世纪最重要的统计方法,而且还可以称为数理统计学之灵魂。相关回归分析、方差分析和线性模型理论等数理统计学的几大分支都以最小二乘法为理论基础。正如美国统计学家斯蒂格勒( S. M. Stigler)所说,“最小二乘法之于数理统计学犹如微积分之于数学”。最小二乘法是参数回归的最基本得方法所以研究最小二乘法原理及其应用对于统计的学习有很重要的意义。 2. 最小二乘法 所谓最小二乘法就是:选择参数10,b b ,使得全部观测的残差平方和最小. 用数学公式表示为: 21022)()(m in i i i i i x b b Y Y Y e --=-=∑∑∑∧ 为了说明这个方法,先解释一下最小二乘原理,以一元线性回归方程为例. i i i x B B Y μ++=10 (一元线性回归方程)
最小二乘法的基本原理和多项式拟合 一 最小二乘法的基本原理 从整体上考虑近似函数)(x p 同所给数据点),(i i y x (i=0,1,…,m)误差 i i i y x p r -=)((i=0,1,…,m) 的大小,常用的方法有以下三种:一是误差 i i i y x p r -=)((i=0,1,…,m)绝对值的最大值i m i r ≤≤0max ,即误差 向量 T m r r r r ),,(10 =的∞—范数;二是误差绝对值的和∑=m i i r 0 ,即误差向量r 的1— 范数;三是误差平方和∑=m i i r 02 的算术平方根,即误差向量r 的2—范数;前两种方法简单、自然,但不便于微分运算 ,后一种方法相当于考虑 2—范数的平方,因此在曲线拟合中常采用误差平方和∑=m i i r 02 来 度量误差i r (i=0,1,…,m)的整 体大小。 数据拟合的具体作法是:对给定数据 ),(i i y x (i=0,1,…,m),在取定的函数类Φ中,求Φ∈)(x p ,使误差i i i y x p r -=)((i=0,1,…,m)的平方和最小,即 ∑=m i i r 2 = 从几何意义上讲,就是寻求与给定点),(i i y x (i=0,1,…,m)的距离平方和为最 小的曲线 )(x p y =(图6-1)。函数)(x p 称为拟合函数或最小二乘解,求拟合函数)(x p 的方法称为曲线拟合的最小二乘法。 在曲线拟合中,函数类Φ可有不同的选取方法 . 6—1 二 多项式拟合 假设给定数据点),(i i y x (i=0,1,…,m),Φ为所有次数不超过)(m n n ≤的多项式构成的函数类,现求一 Φ ∈=∑=n k k k n x a x p 0 )(,使得 [] min )(0 02 02 =??? ??-=-=∑∑∑===m i m i n k i k i k i i n y x a y x p I (1) [ ] ∑ = = - m i i i y x p 0 2 min ) (
曲线拟合(curve-fitting ):工程实践中,用测量到的一些离散的数据},...2,1,0),,{(m i y x i i =求一个近似的函数)(x ?来拟合这组数据,要求所得的拟合曲线能最好的反映数据的基本趋势(即使)(x ?最好地逼近()x f ,而不必满足插值原则。因此没必要取)(i x ?=i y ,只要使i i i y x -=)(?δ尽可能地小)。 原理: 给定数据点},...2,1,0),,{(m i y x i i =。求近似曲线)(x ?。并且使得近似曲线与()x f 的偏差最小。近似曲线在该点处的偏差i i i y x -=)(?δ,i=1,2,...,m 。 常见的曲线拟合方法: 1.使偏差绝对值之和最小 2.使偏差绝对值最大的最小 3.使偏差平方和最小 最小二乘法: 按偏差平方和最小的原则选取拟合曲线,并且采取二项式方程为拟合曲线的方法,称为最小二乘法。 推导过程: 1. 设拟合多项式为: 2. 各点到这条曲线的距离之和,即偏差平方和如下: 3. 问题转化为求待定系数0a ...k a 对等式右边求i a 偏导数,因而我们得到 了: ....... 4、 把这些等式化简并表示成矩阵的形式,就可以得到下面的矩阵: 5. 将这个范德蒙得矩阵化简后可得到:
6. 也就是说X*A=Y,那么A = (X'*X)-1*X'*Y,便得到了系数矩阵A,同时,我们也就得到了拟合曲线。 MATLAB实现: MATLAB提供了polyfit()函数命令进行最小二乘曲线拟合。 调用格式:p=polyfit(x,y,n) [p,s]= polyfit(x,y,n) [p,s,mu]=polyfit(x,y,n) x,y为数据点,n为多项式阶数,返回p为幂次从高到低的多项式系数向量p。x必须是单调的。矩阵s包括R(对x进行QR分解的三角元素)、df(自由度)、normr(残差)用于生成预测值的误差估计。 [p,s,mu]=polyfit(x,y,n)在拟合过程中,首先对x进行数据标准化处理,以在拟合中消除量纲等影响,mu包含标准化处理过程中使用的x的均值和标准差。 polyval( )为多项式曲线求值函数,调用格式: y=polyval(p,x) [y,DELTA]=polyval(p,x,s) y=polyval(p,x)为返回对应自变量x在给定系数P的多项式的值。 [y,DELTA]=polyval(p,x,s) 使用polyfit函数的选项输出s得出误差估计Y DELTA。它假设polyfit函数数据输入的误差是独立正态的,并且方差为常数。则Y DELTA将至少包含50%的预测值。 如下给定数据的拟合曲线: x=[0.5,1.0,1.5,2.0,2.5,3.0], y=[1.75,2.45,3.81,4.80,7.00,8.60]。 解:MATLAB程序如下: x=[0.5,1.0,1.5,2.0,2.5,3.0]; y=[1.75,2.45,3.81,4.80,7.00,8.60]; p=polyfit(x,y,2) x1=0.5:0.05:3.0; y1=polyval(p,x1); plot(x,y,'*r',x1,y1,'-b') 运行结果如图1 计算结果为: p =0.5614 0.8287 1.1560 即所得多项式为y=0.5614x^2+0.08287x+1.15560 图1 最小二乘法曲线拟合示例 对比检验拟合的有效性: 例:在[0,π]区间上对正弦函数进行拟合,然后在[0,2π]区间画出图形,比较拟合区间和非拟合区间的图形,考察拟合的有效性。 在MATLAB中输入如下代码: clear x=0:0.1:pi; y=sin(x); [p,mu]=polyfit(x,y,9)
用最小二乘法进行多项式拟合(m a t l a b 实现) 西安交通大学 徐彬华 算法分析: ,1,2,3,..,m),一共m+1 个数据点,取多项式P(x),使 函数P(x)称为拟合函数或最小二乘解,令似的 使得 其中,a0,a1,a2,…,an 为待求未知数,n 为多项式的最高次幂,由此,该问题化为求 的极值问题。由多元函数求极值的必要条件: j=0,1,…,n 得到: 总共有7个数据点,令m=6 第一步:画出已知数据的的散点图,确定拟合参数n; x=::;y=[,,,,,,]; plot(x,y,'*') xlabel 'x 轴' ylabel 'y 轴' title '散点图' hold on
因此将拟合参数n设为3. 第二步:计算矩阵 A= 注意到该矩阵为(n+1)*(n+1)矩阵, 多项式的幂跟行、列坐标(i,j)的关系为i+j-2,由此可建立循环来求矩阵的各个元素,程序如下: m=6;n=3; A=zeros(n+1); for j=1:n+1 for i=1:n+1 for k=1:m+1 A(j,i)=A(j,i)+x(k)^(j+i-2) end end end; 再来求矩阵 B= B=[0 0 0 0]; for j=1:n+1 for i=1:m+1 B(j)=B(j)+y(i)*x(i)^(j-1) end end 第三步:写出正规方程,求出a0,,a1…,an.
B=B'; a=inv(A)*B; 第四步:画出拟合曲线 x=[::]; z=a(1)+a(2)*x+a(3)*x.^2+a(4)*x.^3; plot(x,z) legend('离散点','y=a(1)+a(2)*x+a(3)*x.^2+a(4)*x.^3') title('拟合图') 总程序附下: x=::;y=[,,,,,,]; plot(x,y,'*') xlabel 'x轴' ylabel 'y轴' title '散点图' hold on m=6;n=3; A=zeros(n+1); for j=1:n+1 for i=1:n+1 for k=1:m+1 A(j,i)=A(j,i)+x(k)^(j+i-2) end end end; B=[0 0 0 0]; for j=1:n+1 for i=1:m+1 B(j)=B(j)+y(i)*x(i)^(j-1) end end B=B'; a=inv(A)*B; x=[::]; z=a(1)+a(2)*x+a(3)*x.^2+a(4)*x.^3; plot(x,z) legend('离散点','y=a(1)+a(2)*x+a(3)*x.^2+a(4)*x.^3') title('拟合图')
第四章最小二乘法与组合测量 §1概述 最小二乘法是用于数据处理和误差估计中的一个很得力的数学工具。对于从事精密科学实验的人们来说,应用最小乘法来解决一些实际问题,仍是目前必不可少的手段。例如,取重复测量数据的算术平均值作为测量的结果,就是依据了使残差的平方和为最小的原则,又如,在本章将要用最小二乘法来解决一类组合测量的问题。另外,常遇到用实验方法来拟合经验公式,这是后面一章回归分析方法的内容,它也是以最小二乘法原理为基础。 最小二乘法的发展已经经历了200多年的历史,它最先起源于天文和大地测量的需要,其后在许多科学领域里获得了广泛应用,特别是近代矩阵理论与电子计算机相结合,使最小二乘法不断地发展而久盛不衰。 本章只介绍经典的最小二乘法及其在组合测量中的一些简单的应用,一些深入的内容可参阅专门的书籍和文献。 §2最小二乘法原理 最小二乘法的产生是为了解决从一组测量值中寻求最可信赖值的问题。对某量x 测量一组数据n x x x ,,,21 ,假设数据中不存在系统误差和粗大误差,相互独立,服从正态分布,它们的标准偏差依次为:n σσσ ,,21记最可信赖值为x ,相应的残差x x v i i -=。测值落入),(dx x x i i +的概率。 根据概率乘法定理,测量n x x x ,,,21 同时出现的概率为 显然,最可信赖值应使出现的概率P 为最大,即使上式中页指数中的因子达最小,即
权因子:2 2o i i w σσ=即权因子i w ∝21i σ,则 再用微分法,得最可信赖值x 1 1 n i i i n i i w x x w === ∑∑即加权算术平均值 这里为了与概率符号区别,以i ω表示权因子。 特别是等权测量条件下,有: 以上最可信赖值是在残差平方和或加权残差平方和为最小的意义下求得的,称之为最小二乘法原理。它是以最小二乘方而得名。 为从一组测量数据中求得最佳结果,还可使用其它原理。 例如 (1)最小绝对残差和法:Min v i =∑ (2)最小最大残差法:Min v i =max (3)最小广义权差法:Min v v i i =-m in m ax 以上方法随着电子计算机的应用才逐渐引起注意,但最小二乘法便于解析,至今仍用得最广泛。 §3.线性参数最小二乘法 先举一个实际遇到的测量问题,为精密测定三个电容值:321,,x x x 采用的测量方案是,分别等权、独立测得323121,,,x x x x x x ++,列出待解的数学模型。 1x =0.3 2x =-0.4 1x +3x =0.5
最小二乘法数据拟合 设给定数据),(i i f x ,),,2,1(m i = 在集合},,,{Span 10n ??? =Φ中找一个函数 )()(* 0** x a x S k n k k ?∑==,)(m n < (1) 其误差是 i i i f x S -=)(*δ,),,2,1(m i = (2) 使)(* x S 满足 2 1 )(2 *1 1 2 ])()[(min ])()[(i i m i i x S i i m i i m i i f x S x f x S x -=-=∑∑∑=Φ ∈==ωωδ (3) 0)(≥x ω是],[b a 上给定的权函数。上述求逼近函数)(*x S 的方法就称为曲线拟合的最小二 乘法。满足关系式(3)的函数)(* x S 称为上述最小二乘问题的最小二乘解。 并且有结论: 1)对于给定的函数表),(i i f x ,),,2,1(m i =,在函数类},,,{Span 10n ??? =Φ中存在唯一的函数)()(*0** x a x S k n k k ?∑== ,使得关系式(3)成立。 2)最小二乘解的系数* *1*0,,,n a a a 可以通过解法方程 ),(),(0 ???f a k n k j k =∑=,),,2,1,0(n j = (4) 作为曲线拟合的一种常用的情况,如果讨论的是代数多项式拟合,即取 },,,,1{},,,{210n n x x x =??? 那么相应的法方程(4)就是 ??????????????=???????????????????????? ??∑∑∑∑∑∑∑∑∑∑∑∑++i n i i i i i i i n n i i n i i n i i n i i i i i i n i i i i i f x f x f a a a x x x x x x x x ωωωωωωωωωωωω 102112 (5)
4.5 广义最小二乘法(GLS ) GLS----Generalized Least Squares 1. 基本原理 广义最小二乘法的基本思想在于引入一个所谓成形滤波器(白化滤波器),把相关噪声)(k ξ转化成白噪声)(k ε。 由方程(4-4)、(4-5),系统的差分方程可以表示为 )()()()()(11k k u z b k y z a ξ+=-- (4-114) 式中 n n z a z a z a z a ----++++=ΛΛ221111)( n n z b z b z b b z b ----++++=ΛΛ221101)( 如果知道有色噪声序列)(k ξ的相关性,则可以把)(k ξ看成白噪声通过线性系统后所得的结果。这种线性系统通常称为成形滤波器,其差分方程为 )()()()(11 _ k z d k z c εξ-- -= (4-115) 式中)(k ε是均值为零的白噪声序列,)()(1 1 _ -- -z d 、z c 是1 -z 的多项式。 令 _11 1212_ 1()()1() m m c z f z f z f z f z d z ------= =+++L L (4-116) 有 )() (1 )()()()(11k z f k k k z f εξεξ--==或 (4-117) 即 1212(1)()()m m f z f z f z k k ξε---++++=L L (4-118) 或 )()()2()1()(21k m k f k f k f k m εξξξξ+-------=ΛΛ () 1,,n k n N =++L L (4-119) 这一噪声模型(自回归模型)的阶m ,一般事先是不知道的,实际经验表明,若指定m
广义递推最小二乘辨识 一、实验目的 1 通过实验掌握广义最小二乘辨识算法; 2 运用MATLAB编程,掌握算法实现方法。 二、实验原理 广义最小二乘法的基本思想是基于对数据先进行一次滤波预处理,然后利用普通最小二乘法对滤波后的数据进行辨识。如果滤波模型选择得合适,对数据进行了较好的白色化处理,那么直接利用普通最小二乘法就能获得无偏一致估计。 广义最小二乘法所用的滤波模型实际上就是一种动态模型,在整个迭代过程中不断靠偏差信息来调整这个滤波模型,使它逐渐逼近于一个较好的滤波模型,以便对数据进行较好的白色化处理,使模型参数估计称为无偏一致估计。理论上说,广义最小二乘法所用的动态模型经过几次迭代调整后,便可对数据进行较好的白化处理,但是,当过程的输出噪信比比较大或模型参数比较多时,这种数据白色化处理的可靠性就会下降。此时,准则函数可能出现多个局部收敛点,因而辨识结果可能使准则函数收敛于局部极小点上而不是全局极小点上。这样,最终的辨识结果往往也会是有偏的。 其收敛速度比较慢,需要经过多次迭代计算,才能得到较准确的参数估计值。一般情况下,经过多次迭代后,估计值便会收敛到稳态值。但在某些情况下(如噪声比较低时)存在局部极小值,估计值不一定收敛到准则函数的全局极小值上。为了防止参数估计值收敛到局部极小值,最好选定初值接近最优解,一般可以用最小二乘法的批处理估计值作为初值。如果系统是时变的,或为了克服数据饱和现象,可以在两次RLS算法中分别引进遗忘因子。 三、实验内容 <1> 数据获取:实验数据按照表9-1,为二阶线性离散系统的输入输出数据 <2> 数据处理:为了提高辨识精度,实验者必须对原始数据进行剔除坏数据、零均值化、工频滤波等处理。实验进行了白化滤波处理。 <3> 辨识算法:利用处理过的数据(取适当的数据长度),选择某种辨识方法(如RLS递推最小二乘法、RELS、RIV或RML等参数估计算法及F-检验或AIC定
第6章曲线拟合的最小二乘法 6.1 拟合曲线 通过观察或测量得到一组离散数据序列,当所得数据比较准确时,可构造插值函数逼近客观存在的函数,构造的原则是要求插值函数通过这些数据点,即。此时,序列与 是相等的。 如果数据序列,含有不可避免的误差(或称“噪音”),如图6.1 所示;如果数据序列无法同时满足某特定函数,如图6.2所示,那么,只能要求所做逼近函数最优地靠近样点,即向量与的误差或距离最小。按与之间误差最小原则作为“最优”标准构造的逼近函数,称为拟合函数。 图6.1 含有“噪声”的数据 图6.2 一条直线公路与多个景点 插值和拟合是构造逼近函数的两种方法。插值的目标是要插值函数尽量靠近离散点;拟合的目标是要离散点尽量靠近拟合函数。 向量与之间的误差或距离有各种不同的定义方法。例如: 用各点误差绝对值的和表示: 用各点误差按模的最大值表示: 用各点误差的平方和表示: 或(6.1)
其中称为均方误差,由于计算均方误差的最小值的方法容易实现而被广泛采用。按 均方误差达到极小构造拟合曲线的方法称为最小二乘法。本章主要讲述用最小二乘法构造拟合曲线的方法。 在运筹学、统计学、逼近论和控制论中,最小二乘法都是很重要的求解方法。例如,它是统计学中估计回归参数的最基本方法。 关于最小二乘法的发明权,在数学史的研究中尚未定论。有材料表明高斯和勒让德分别独立地提出这种方法。勒让德是在1805年第一次公开发表关于最小二乘法的论文,这时高斯指出,他早在1795年之前就使用了这种方法。但数学史研究者只找到了高斯约在1803年之前使用了这种方法的证据。 在实际问题中,怎样由测量的数据设计和确定“最贴近”的拟合曲线?关键在选择适当的拟合曲线类型,有时根据专业知识和工作经验即可确定拟合曲线类型;在对拟合曲线一无所知的情况下,不妨先绘制数据的粗略图形,或许从中观测出拟合曲线的类型;更一般地,对数据进行多种曲线类型的拟合,并计算均方误差,用数学实验的方法找出在最小二乘法意义下的误差最小的拟合函数。 例如,某风景区要在已有的景点之间修一条规格较高的主干路,景点与主干路之间由各具特色的支路联接。设景点的坐标为点列;设主干路为一条直线 ,即拟合函数是一条直线。通过计算均方误差最小值而确定直线方程(见图6.2)。 6.2线性拟合和二次拟合函数 线性拟合 给定一组数据,做拟合直线,均方误差为 (6.2) 是二元函数,的极小值要满足 整理得到拟合曲线满足的方程:
最小二乘法参数辨识 201403027 摘要:系统辨识在工程中的应用非常广泛,系统辨识的方法有很多种,最小 二乘法是一种应用极其广泛的系统辨识方法.阐述了动态系统模型的建立及其最小二乘法在系统辨识中的应用,并通过实例分析说明了最小二乘法应用于系统辨识中的重要意义. 关键词:最小二乘法;系统辨识;动态系统 Abstract: System identification in engineering is widely used, system identification methods there are many ways, least squares method is a very wide range of application of system identification method and the least squares method elaborated establish a dynamic system models in System Identification applications and examples analyzed by the least squares method is applied to illustrate the importance of system identification. Keywords: Least Squares; system identification; dynamic system
引言 随着科学技术的不断发展,人们认识自然、利用自然的能力越来越强,对于未知对象的探索也越来越深入.我们所研究的对象,可以依据对其了解的程度分为三种类型:白箱、灰箱和黑箱.如果我们对于研究对象的内部结构、内部机制了解很深入的话,这样的研究对象通常称之为“白箱”;而有的研究对象,我们对于其内部结构、机制只了解一部分,对于其内部运行规律并不十分清楚,这样的研究对象通常称之为“灰箱”;如果我们对于研究对象的内部结构、内部机制及运行规律均一无所知的话,则把这样的研究对象称之为“黑箱”.研究灰箱和黑箱时,将研究的对象看作是一个系统,通过建立该系统的模型,对模型参数进行辨识来确定该系统的运行规律.对于动态系统辨识的方法有很多,但其中应用最广泛,辨识 效果良好的就是最小二乘辨识方法,研究最小二乘法在系统辨识中的应用具有现实的、广泛的意义. 1.1 系统辨识简介 系统辨识是根据系统的输入输出时间函数来确定描述系统行为的数学模型。现代控制理论中的一个分支。通过辨识建立数学模型的目的是估计表征系统行为的重要参数,建立一个能模仿真实系统行为的模型,用当前可测量的系统的输入和输出预测系统输出的未来演变,以及设计控制器。对系统进行分析的主要问题是根据输入时间函数和系统的特性来确定输出信号。对系统进行控制的主要问题是根据系统的特性设计控制输入,使输出满足预先规定的要求。而系统辨识所研究的问题恰好是这些问题的逆问题。通常,预先给定一个模型类μ={M}(即给定一类已知结构的模型),一类输入信号u和等价准则J=L(y,yM)(一般情况下,J是误差函数,是过程输出y和模型输出yM的一个泛函);然后选择使误差函数J达到最小的模型,作为辨识所要求的结果。系统辨识包括两个方面:结构辨识和参数估计。在实际的辨识过程中,随着使用的方法不同,结构辨识和参数估计这两个方面并不是截然分开的,而是可以交织在一起进行的。 1.2系统辨识的目的 在提出和解决一个辨识问题时,明确最终使用模型的目的是至关重要的。它对模型类(模型结构)、输入信号和等价准则的选择都有很大的影响。通过辨识建立数学模型通常有四个目的。 ①估计具有特定物理意义的参数有些表征系统行为的重要参数是难以直接测量的,例如在生理、生态、环境、经济等系统中就常有这种情况。这就需要通过能观测到的输入输出数据,用辨识的方法去估计那些参数。 ②仿真仿真的核心是要建立一个能模仿真实系统行为的模型。用于系统分析的仿真模型要求能真实反映系统的特性。用于系统设计的仿真,则强调设计参数能正确地符合它本身的物理意义。 ③预测这是辨识的一个重要应用方面,其目的是用迄今为止系统的可测量的输入和输出去预测系统输出的未来的演变。例如最常见的气象预报,洪水预报,其他如太阳黑子预报,市场价格的预测,河流污染物含量的预测等。预测模型辨识的等价准则主要是使预测误差平方和最小。只要预测误差小就是好的预测
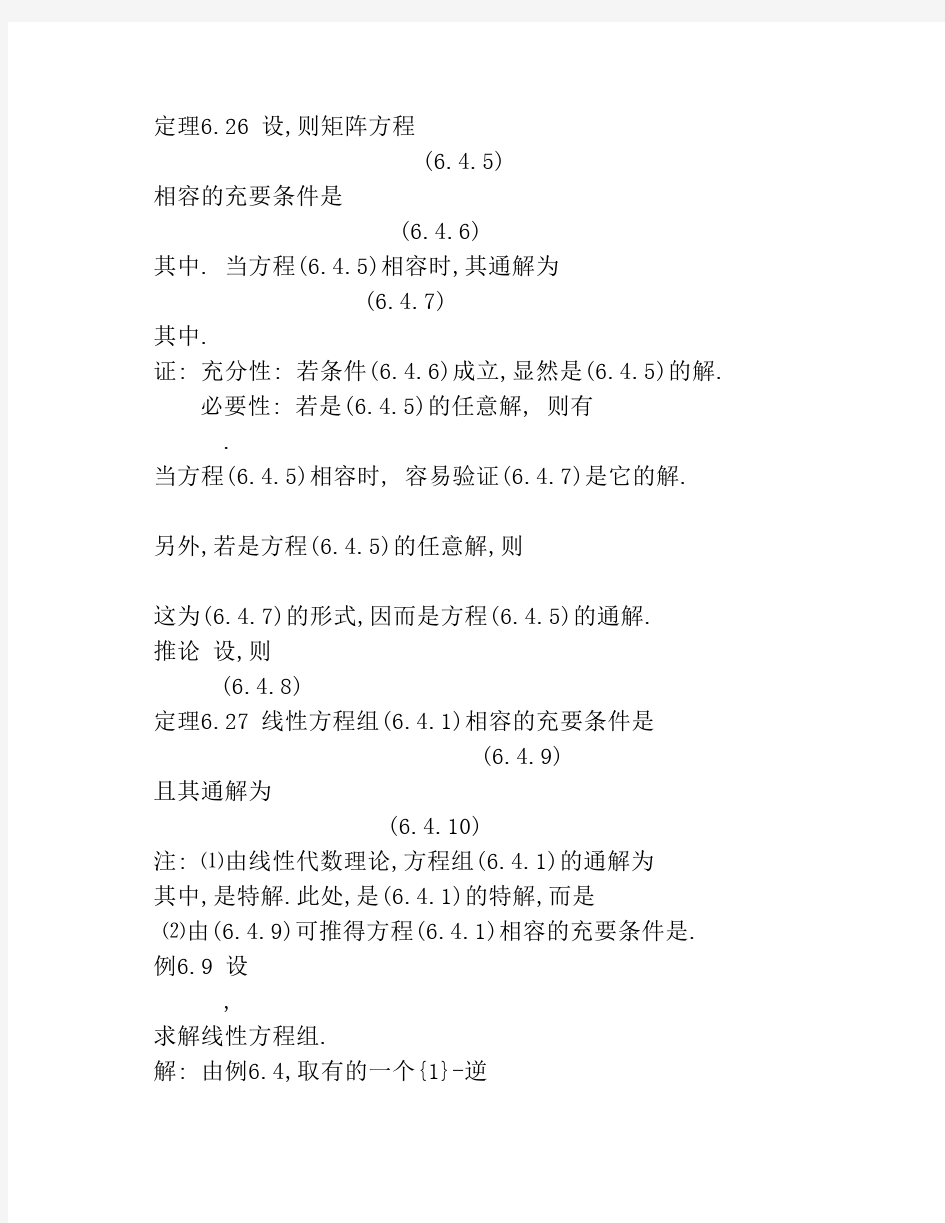
最小二乘法主要用来求解两个具有线性相关关系的变量的回归方程,该方法适用于求解与线性回归方程相关的问题,如求解回归直线方程,并应用其分析预报变量的取值等.破解此类问题的关键点如下: ①析数据,分析相关数据,求得相关系数r,或利用散点图判断两变量之间是否存在线性相关关系,若呈非线性相关关系,则需要通过变量的变换转化构造线性相关关系. ②建模型.根据题意确定两个变量,结合数据分析的结果建立回归模型. ③求参数.利用回归直线y=bx+a的斜率和截距的最小二乘估计公式,求出b,a,的值.从而确定线性回归方程. ④求估值.将已知的解释变量的值代入线性回归方程y=bx+a中,即可求得y的预测值. 注意:回归直线方程的求解与应用中要注意两个方面:一是求解回归直线方程时,利用样本点的中心(x,y)必在回归直线上求解相关参数的值;二是回归直线方程的应用,利用回归直线方程求出的数值应是一个估计值,不是真实值. 经典例题: 下图是某地区2000年至2016年环境基础设施投资额(单位:亿元)的折线图.
为了预测该地区2018年的环境基础设施投资额,建立了与时间变量的两个线性回归模型.根据2000年至2016年的数据(时间变量的值依次为1,2.,……,17)建立模型①:y=+;根据2010年至2016年的数据(时间变量的值依次为)建立模型②:y=99+. (1)分别利用这两个模型,求该地区2018年的环境基础设施投资额的预测值; (2)你认为用哪个模型得到的预测值更可靠并说明理由. 思路分析:(1)两个回归直线方程中无参数,所以分别求自变量为2018时所对应的函数值,就得结果,(2)根据折线图知2000到2009,与2010到2016是两个有明显区别的直线,且2010到2016的增幅明显高于2000到2009,也高于模型1的增幅,因此所以用模型2更能较好得到2018的预测. 解析:(1)利用模型①,该地区2018年的环境基础设施投资额的预测值为 =–+×19=(亿元). 利用模型②,该地区2018年的环境基础设施投资额的预测值为 =99+×9=(亿元). (2)利用模型②得到的预测值更可靠.理由如下: (i)从折线图可以看出,2000年至2016年的数据对应的点没有随机散布在直线y=–+上下,这说明利用2000年至2016年的数据建立的线性模型①不能很好地描述环境基础设施投资额的变化趋势.2010年相对2009年的环境基础设施投资额有明显增加,2010年至2016年的数据对应的点位于一条直线的附近,这说明从2010年开始环境基础设施投资额的变化规律呈线性增长趋势,利
最小二乘拟合 在物理实验中经常要观测两个有函数关系的物理量。根据两个量的许多组观测数据来确定它们的函数曲线,这就是实验数据处理中的曲线拟合问题。这类问题通常有两种情况:一种是两个观测量x 与y 之间的函数形式已知,但一些参数未知,需要确定未知参数的最佳估计值;另一种是x 与y 之间的函数形式还不知道,需要找出它们之间的经验公式。后一种情况常假设x 与y 之间的关系是一个待定的多项式,多项式系数就是待定的未知参数,从而可采用类似于前一种情况的处理方法。 一、最小二乘法原理 在两个观测量中,往往总有一个量精度比另一个高得多,为简单起见把精度较高的观测量看作没有误差,并把这个观测量选作x ,而把所有的误差只认为是y 的误差。设x 和y 的函数关系由理论公式 y =f (x ;c 1,c 2,……c m ) (0-0-1) 给出,其中c 1,c 2,……c m 是m 个要通过实验确定的参数。对于每组观测数据(x i ,y i )i =1,2,……,N 。都对应于xy 平面上一个点。若不存在测量误差,则这些数据点都准确 落在理论曲线上。只要选取m 组测量值代入式(0-0-1),便得到方程组 y i =f (x ;c 1,c 2,……c m ) (0-0-2) 式中i =1,2,……,m.求m 个方程的联立解即得m 个参数的数值。显然N
%最小二乘法线性拟合y=ax+b x=[0:0.2:4.0]; y=[0.02 0.375 0.73 1.06 1.335 1.595 1.84 2.045 2.23 2.38 2.485 2.565 2.625 2.67 2.705 2.73 2.76 2.78 2.79 2.81 2.82]; p=polyfit(x,y,1); z=polyval(p,x); plot(x,y,'+'); title(‘V-X曲线’) grid on xlabel(‘X/mm’) ylabel(‘V/v’) hold on x=[0:0.2:-4.0]; y=[0.01 -0.385 -0.8 -1.22 -1.64 -2.055 -2.455 -2.825 -3.165 -3.64 -3.74 -3.915 -4.06 -4.155 -4.235 -4.295 -4.345 -4.385 -4.415 -4.445 -4.47]; p=polyfit(x,y,1); z=polyval(p,x); plot(x,y,'+'); x=[0:0.2:4.0]; y=[0.02 0.375 0.73 1.06 1.335 1.595 1.84 2.045 2.23 2.38 2.485 2.565 2.625 2.67 2.705 2.73 2.76 2.78 2.79 2.81 2.82]; p=polyfit(x,y,1); x=[0:-0.2:-4.0]; y=[0.01 -0.385 -0.8 -1.22 -1.64 -2.055 -2.455 -2.825 -3.165 -3.64 -3.74 -3.915 -4.06 -4.155 -4.235 -4.295 -4.345 -4.385 -4.415 -4.445 -4.47]; p=polyfit(x,y,1); x=[0:0.2:4.0]; y=[0.02 0.375 0.73 1.06 1.335 1.595 1.84 2.045 2.23 2.38 2.485 2.565 2.625 2.67 2.705 2.73 2.76 2.78 2.79 2.81 2.82]; xmean=mean(x);ymean=mean(y); sumx2=(x-xmean)*(x-xmean)'; sumxy=(y-ymean)*(x-xmean)'; a=sumxy/sumx2;%解出直线斜率a(即传感器灵敏度) b=ymean-a*xmean;%解出直线截距b z=((a*(x(1,11))+b-(y(1,11)))/(y(1,11))); a b z figure plot(x,y,'+'); hold on
---------------------------------------------------------------最新资料推荐------------------------------------------------------ 各类最小二乘法比较 最小二乘法(LS)最小二乘是一种最基本的辨识方法,最小二乘法可以用于线性系统,也可以用于非线性系统;可用于离线估计和在线估计。 在随机情况下,利用最小二乘法时,并不要求观测数据提供其概率统计方法的信息,而其估计结果,却有相当好的统计特性。 但它具有两方面的缺陷: 一是当模型噪声是有色噪声时,最小二乘估计不是无偏、一致估计;二是随着数据的增长,将出现所谓的数据饱和现象。 针对这两个问题,出现了相应的辨识算法,如遗忘因子法、限定记忆法、偏差补偿法、增广最小二乘、广义最小二乘、辅助变量法、二步法及多级最小二乘法等。 广义最小二乘法(GLS)广义最小二乘法(GLS)广义最小二乘法的基本思想在于引入一个所谓成形滤波器(白化滤波器),把相关噪声转化成白噪声。 优: 能够克服当存在有色噪声干扰时,基本最小二乘估计的有偏性,估计效果较好,在实际中得到较好的应用。 缺: 1、计算量大,每个循环要调用两次最小二乘法及一次数据滤波, 2、求差分方程的参数估值,是一个非线性最优化问题,不一定总能 1 / 3
保证算法对最优解的收敛性。 广义最小二乘法本质上是一种逐次逼近法。 对于循环程序的收敛性还没有给出证明。 3、GLS 算法的最小二乘指标函数 J 中可能存在一个以上局部极小值,(特别在信噪比不大时,J 可能是多举的)。 GLS 方法的估计结果往往取决于所选用参数的初始估值。 参数估计初值应选得尽量接近优参数。 在没有验前信息的情况下,最小二乘估值被认为是最好的初始条件。 4、广义最小二乘法的收敛速度不是很高。 递推最小二乘法(RLS)递推最小二乘法(RLS)优点: 1、无需存储全部数据,取得一组观测数据便可估计一次参数,而且都能在一个采样周期中完成,所需计算量小,占用的存储空间小。 2、具有一定的实时处理能力辅助变量法(IV、RIV)计算较简单,估计是无偏估计,但计算精度较低辅助变量法、增广矩阵法能保证精度和收敛,算法简单,可同时得到参数和噪声模型的估计,工程应用效果很好但计算量也较大。 RIV 总收敛于参数真值。 加权最小二乘法加权最小二乘法可对不同置信度的测量值采用加权的办法分别对待,置信度加权高的,权重取得大些;置信度低的,权重取的小些。 但加权最小二乘法仅能用于事先能估计方程误差对参数估计的影
Least Squares Fit Abstract: The techniques of least squares optimization have their origins in problems of curve fitting, and of finding the best possible solution for a system of linear equations with infinitely many solutions. Curve fitting problems begin with data points (t 1, S 1), . . . , (tn' sn) and a given class of functions (for example, linear functions, polynomial functions, exponential functions), and seek to identify the function S = f(t) that "best fits" the data points. On the other hand, such problems as finding the minimum distance in geometric contexts or minimum variance in statistical contexts can often be solved by finding the solution of minimum norm for an underdetermined linear system of equations. Keyword:Least Squares、Fit、Equations Text:Suppose that in a certain experiment or study, we record a series of observed values (t 1 , Sl), (t 2 , S2), ..., (tn, Sn) of two variables s, t that we have reason to believe are related by a function s = f(t) of a certain type. For example, we might know that sand t are related by a polynomial function of degree < k, where k is prescribed in advance, but we do not know the specific values of the coefficients xo, Xl' ..., X k of p(t). We are interested in choosing the values of these coefficients so that the deviations between the observed value Si at t i and the value p(tJ of p(t) at t i , are all as small as possible. One reasonable approach to this problem is to minimize the function
曲线拟合的最小二乘法 吕英楷 1014202033 在物理实验中经常要观测两个有函数关系的物理量。根据两个量的许多组观测数据来确定它们的函数曲线,这就是实验数据处理中的曲线拟合问题。这类问题通常有两种情况:一种是两个观测量x 与y 之间的函数形式已知,但一些参数未知,需要确定未知参数的最佳估计值;另一种是x 与y 之间的函数形式还不知道,需要找出它们之间的经验公式。后一种情况常假设x 与y 之间的关系是一个待定的多项式,多项式系数就是待定的未知参数,从而可采用类似于前一种情况的处理方法。 一、曲线拟合的最小二乘法原理: 由已知的离散数据点选择与实验点误差最小的曲线 )(...)()()(1100x a x a x a x S n n ???+++= 称为曲线拟合的最小二乘法。 若记 ),()()(),(0 i k i j m i i k j x x x ??ω??∑== k i k i m i i k d x x f x f ≡=∑=)()()(),(0 ?ω? 上式可改写为),...,1,0(;),(n k d a k j n o j j k -=∑=??这个方程成为法方程,可写成距阵 形式 d Ga = 其中,),...,,(,),...,,(1010T n T n d d d d a a a a == ???? ?? ??????=),(),(),()(),(),(),(),(),(10 1110101000n n n n n n G ?????????????????? 。 它的平方误差为:.)]()([)(||||20 22i i m i i x f x S x -= ∑=ωδ
第五章 广义最小二乘法 当计量经济学模型同时存在序列相关和异方差,而且随机误差项的方差-协方差矩阵未知时我们可以考虑使用广义最小二乘法(GLS)。即下列模型: μβ+=X Y 满足这样一些条件: 0)(=μE Ω=2')(δμμCOV nn n n n ωωωωωωωωω 21222 2111211......= Ω 设D D '=ω 用1 -D 左乘μβ+=X Y 的两边,得到一个新的模型 μβ1 1 1 ---+=D X D Y D 即 * * * μβ+=X Y (1) 该模型具有同方差性和随机误差相互独立性。因为可以证明: 2 ** )(δμμ=' E I 于是可用普通最小二乘法估计(1)式,得到的参数估计结果为 **1**)(?Y X X X '-'=β =Y X X X 1 11)(---Ω'Ω' 整个过程最重要的一步就是要估计Ω,当模型存在一阶自相关时。我们取 1 1 121 21 ----= Ωn n n n ρρρρρρ 案例四:广义最小二乘法 在这里我们举例子来说明广义最小二乘法的应用。在讨论这个问题时所采用的数据如下表5.1所示: 表5.1
首先我们计算ρ,我们可以直接根据OLS估计出来的DW来计算,OLS估计出来的结果为下表5.2: 表5.2 可以根据ρ=1-DW/2,DW=0.8774,因此ρ=0.5613,在这个基础上,我们可以得出这个方差-协方差矩阵。方差协方差矩阵可以由以下一个程序来获得: !p=0.5613 matrix(17,17) fac1 for !i=1 to 17 fac1(!i,!i)=1 next for !j=1 to 17 for !i=!j+1 to 17 fac1(!i,!j)=!p^(!i-!j) fac1(!j,!i)=fac1(!i,!j) next next