二:霍尔传感器 由于霍尔元件产生的电势差很小,故通常将霍尔元件与放大器电路、温度补偿电路及稳压电源电路等集成在一个芯片上,称之为霍尔传感器。 霍尔传感器也称为霍尔集成电路,其外形较小,如下图所示,是其中一种型号的 外形图 三:霍尔传感器的分类 霍尔传感器分为线性型霍尔传感器和开关型霍尔传感器两种: 1.线性型霍尔传感器由霍尔元件、线性放大器和射极跟随器组 成,它输出模拟量。 2.开关型霍尔传感器由稳压器、霍尔元件、差分放大器,斯密特触发器和输出级组成,它输出数字量。
配合差分放大器使用霍尔元件产生的电势差很小,一般在毫伏量级,所以在使用时要进行一定的放大处理(如下图) 配合触发器用在上述电路的基础上,再添加一个施密特触发器用作阈值检测,则可以使霍尔器件输出数字信号,结构图如下: 集成场效应管在上述电路的基础上添加一个场效应管,可以
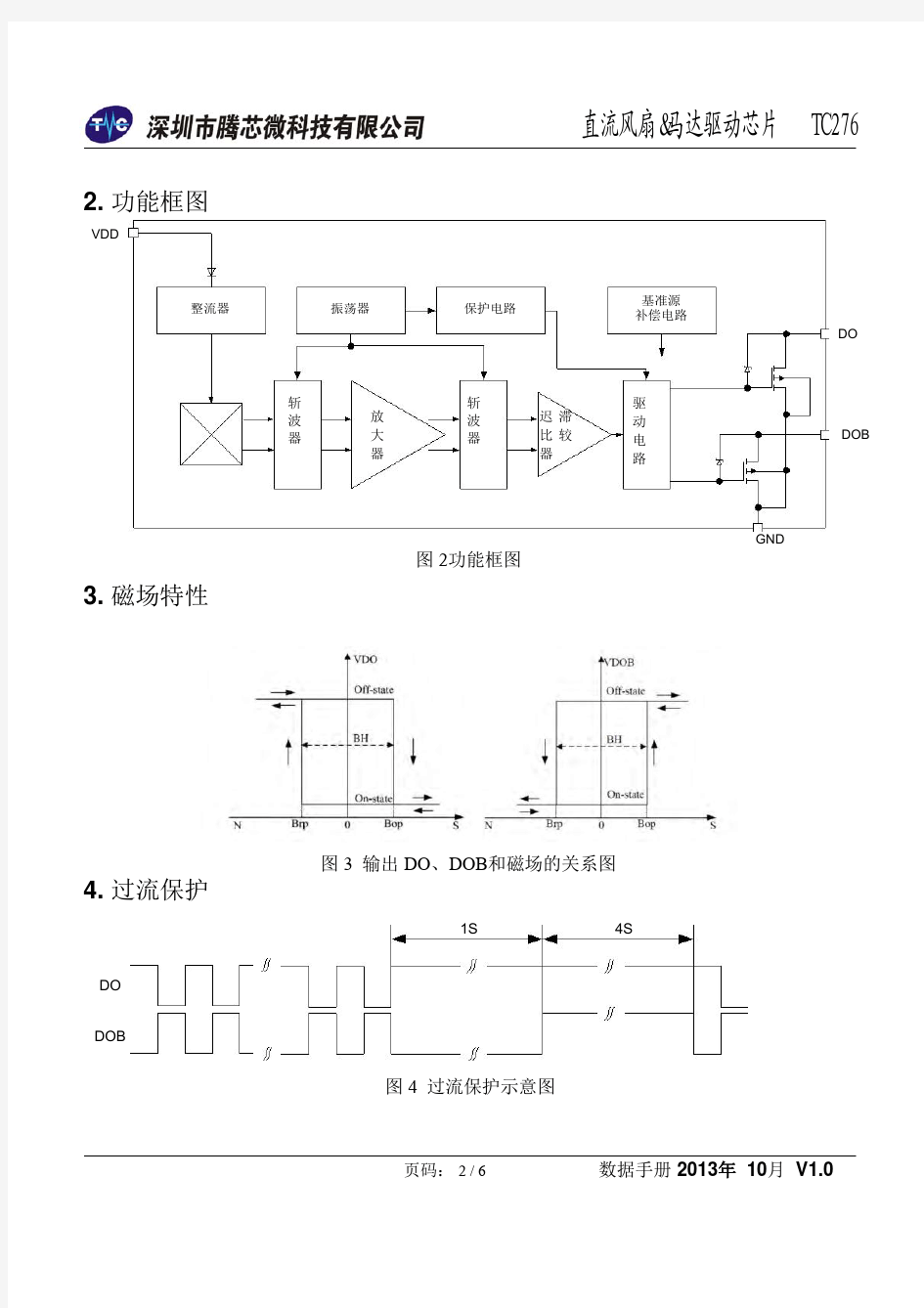
增强霍尔开关的驱动能力(可以直接驱动LED、继电器等) 四:霍尔传感器的特性 1.线性型霍尔传感器的特性 2.开关型霍尔传感器的特性 如图4所示,其中BOP为工 作点“开”的磁感应强度,BRP 为释放点“关”的磁感应强度当 外加的磁感应强度。超过动作点 Bop时,传感器输出低电平,当磁感应强度降到动作点Bop以下时,传感器输出电平不变,一直要降到释放点BRP时,传感器才由低电平跃变为高电平。Bop 与BRP之间的滞后使开关动作更为可靠。
A3144是开关霍尔传感器 五:开关型霍尔传感器 开关型霍尔传感器主要用于测转数、转速、风速、流速、接近开关、关门告知器、报警器、自动控制电路等。 1.测转速或转数 如图所示,在非磁性材料的圆盘边上粘一块磁钢,霍尔传感器放在靠近圆盘边缘处,圆盘旋转一周,霍尔传感器就输出一个脉冲,从而可测出转数(计数器),若接入频率计,便可测出转速。
成绩评定: 传感器技术 课程设计 题目霍尔传感器小车测速
摘要 对车速测量,利用霍尔传感器工作频带宽、响应速度快、测量精度高的特性结合单片机控制电路,设计出了一种新型的测速系统,实现了对脉冲信号的精确、快速测量,硬件成本低,算法简单,稳定性好。霍尔传感器测量电路设计、显示电路设计。测量速度的霍尔传感器和车轴同轴连接,车轴没转一周,产生一定量的脉冲个数,有霍尔器件电路部分输出幅度为12 V 的脉冲。经光电隔离器后成为输出幅度为5 V 转数计数器的计数脉冲。控制定时器计数时间,即可实现对车速的测量。在显示电路设计中,实现LED上直观地显示车轮的转数值。与软件配合,实现了显示、报警功能 关键词:单片机AT89C51 传感器 LED 仿真
目录 一、设计目的------------------------- 1 二、设计任务与要求--------------------- 1 2.1设计任务------------------------- 1 2.2设计要求------------------------- 1 三、设计步骤及原理分析 ----------------- 1 3.1设计方法------------------------- 1 3.2设计步骤------------------------- 3 3.3设计原理分析--------------------- 10 四、课程设计小结与体会 ---------------- 11 五、参考文献------------------------- 11
一、设计目的 通过《传感器及检测技术》课程设计,使学生掌握传感器及检测系统设计的方法和设计原则及相应的硬件调试的方法。进一步理解传感器及检测系统的设计和应用。 用霍尔元件设计测量车速的电子系统,通过对霍尔元件工作原理的掌握实现对车速测量的应用,设计出具体的电子系统电路,并且能够完成精确的车速测量。 二、设计内容及要求 2.1设计任务 霍尔传感器一般由霍尔元件和磁钢组成,当霍尔元件和磁钢相对运动时,就会产生脉冲信号,根据磁钢和脉冲数量就可以计算转速,进而求出车速。 现要求设计一个测量系统,在小车的适当位置安装霍尔元件及磁钢,使之具有以下功能: 功能:1)LED数码管显示小车的行驶距离(单位:cm)。 2)具有小车前进和后退检测功能,并用指示灯显示。 3)记录小车的行驶时间,并实时计算小车的行驶速度。 4)距离测量误差<2cm。 5)其它。 2.2设计要求 设计要求首先选定传感器,霍尔传感器具有灵敏、可靠、体积小巧、无触点、无磨损、使用寿命长、功耗低等优点,综合了电机转速测量系统的要求。其次设计一个单片机小系统,掌握单片机接口电路的设计技巧,学会利用单片机的定时器和中断系统对脉冲信号进行测量或计数。再次实时测量显示并有报警功能,实时测量根据脉冲计数来实现转速测量的方法。要求霍尔传感器转速为0~5000r/min。 三、设计步骤及原理分析 3.1 设计方法 3.1.1 霍尔效应 所谓霍尔效应,是指磁场作用于载流金属导体、半导体中的载流子时,产生
基于霍尔式传感器的电子秤-课程设计
————————————————————————————————作者:————————————————————————————————日期:
课程设计报告 设计题目基于霍尔式传感器的电子秤 指导老师 摘要 科学技术的发展对称重技术提出了更高的要求,尤其是微处理技术和传感技术的巨大进步,大大加速了这个进程。目前,电子秤在商业销售中的使用已相当普遍,但在市场上仍广泛使用的电子秤有很大局限性。这些电子秤体积大、成本高,又不便随身携带,而目前市场上流行的便携秤又大都采用杆式秤或以弹簧压缩、拉伸变形来实现计量的弹簧秤等,其计量误差大,又容易损坏。杆式秤和弹簧秤等计量器械将逐渐被淘汰。因此,一种能够在未来更方便、更准确的普及型电子秤的发展受到人们的重视,设计一种重量轻、计量准确、读数直观的民用电子秤迫在眉睫。 本设计过程充分利用传感器的有关知识,利用霍尔传感器设计的简单电子秤很大程度上满足了此应用需求,并从简单电子秤的基本构造进一步了解大型电子秤的构造原理。 关键词:CSY传感器实验仪;电子秤;霍尔式传感器;差动放大器
目录 第一章绪论 (1) 1.1 电子秤概述 (1) 1.1.1 电子秤的发展 (1) 1.2 电子秤的组成 (2) 1.2.1 电子秤的基本结构 (2) 1.2.2 电子秤的基本工作原理 (2) 第二章电子秤设计的目的意义及设计任务与要求 (4) 2.1 电子秤设计目的 (4) 2.2 此课程在教学计划中的地位和作用 (4) 2.3 电子秤设计任务与要求 (4) 2.3.1 设计任务 (4) 2.3.2 设计要求 (4) 第三章电子秤总体设计方案 (5) 3.1 电子秤设计思想 (5) 3.2各电路单元或部件选择 (6) 3.2.1 直流稳压电源的选择 (6) 3.2.2 电桥平衡网络的选择 (6) 3.2.3 称重传感器的选择 (6) 3.2.4 差动放大器的选择 (9) 3.2.5 F/V表的选择 (9) 3.3 最终方案的确定 (10) 第四章硬件设计 (11) 4.1 硬件设计概要 (11) 4.1.1 硬件电路设计原理说明及电路图 (11)
怎么选择合适自己的霍尔电流传感器 目前,霍尼韦尔电流传感器主要采用了霍尔效应和磁阻效应两种工作原理,是分别利用两种原理对电流产生的磁场大小进行检测,并通过电磁互感的关系得到电流的大小。在工作模式上,霍尼韦尔电流传感器主要有两种方式,其分别是:直接检测式和磁平衡式。 由于霍尼韦尔霍尔电流传感器有诸多优点,目前广泛应用于变频调速装置、逆变装置、UPS 电源、逆变焊机、电解电镀、电动汽车、数控机床、微机监测系统、电网监控系统和需要隔离检测电流电压的各个领域中。泰德兰电子科技代理霍尼韦尔的霍尔电流传感器主要优点如下: 1、测量范围广:它可以测量任意波形的电流和电压,如直流、交流、脉冲、三角波形等,甚至对瞬态峰值电流、电压信号也能忠实地进行反映。 2、响应速度快:快者响应时间只为1us。 3、测量精度高:其测量精度优于1%,该精度适合于对任何波形的测量。 4、线性度好:优于0.2%。 5、动态性能好:响应时间快,可小于1us;普通互感器的响应时间为10~20ms。 6、工作频带宽:在0~1MHz 频率范围内的信号均可以测量。 7、可靠性高,平均无故障工作时间长:平均无故障时间>5 10 小时。 8、过载能力强、测量范围大:0~几十安培~上千安培。 9、体积小、重量轻、易于安装。 那么,作为硬件工程师,我们该如何选择一款合适的霍尔电流传感器呢? 下面我们根据霍尔电流传感器的参数来介绍一下如何选择。
1,先选择工作温度范围 霍尔电流传感器一般有3种工作稳定范围,分别是-40°C ~ 85°C,-40°C ~ 125°C 和-40°C ~ 150°C。工程师根据应用是消费类或者工业类和汽车类的温度范围来选择合适的型号。例如Allegro的霍尔电流传感器ACS712ELCTR-30A-T,712后面的E就是表示-40°C ~ 85°C温度范围,ACS733KLATR-40AB-T中733后面的K表示-40°C ~ 125°C温度范围,ACS724LLCTR-30AB-T中724后的L表示-40°C ~ 150°C的温度范围。 2,确定选择霍尔电流传感器的隔离电压 在霍尔电流传感器的选型表中,有相应的隔离电压,Allegro系列霍尔电流传感器中,隔离电压从100V到4800V不等,另外,在产品规格书中,有对应的工作电压范围,以ACS724LLCTR为例,其隔离电压为2400V,其长期工作电压为297V 3,选择霍尔电流传感器的供电电压 在霍尔电流传感器的选型表中,Vcc电压一般有3.3V和5V两种规格,工程师可以根据自己电路的实际情况选择相应电压的器件 4,选择霍尔电流传感器的峰值电流 在霍尔电流传感器的选型表中,给出了峰值电流范围,有些产品只能够检测单方向电流,型号中用U来表示,有些可以测量双方向电流,型号中用B 来表示,Allegro的霍尔电流传感器,最小测量的电流范围为±2.5A,直接焊接的板上型产品中,最大电流可以测试200A,如需测量200A-1000A产品,可以选用芯片外加磁环方式。 5,选择适合自己使用的带宽 霍尔电流传感器目前可以选择的带宽范围从8kHz到1MHz不等,客户可以根据自己电路的要求选择合适的带宽,其中有4个系列达到了业界目前最高的1M带宽,广泛应用于例如5G和车载充电等高频产品中。 以上几点确定后就可以基本确定了选型型号,如果有更多的拓展要求,可以再根据器件的描述和特点进一步选型。
MH188Specifications Ultra High Sensitivity Hall Effect Latch MH188 Hall-effect sensor is a temperature stable, stress-resistant sensor. Superior high-temperature performance is made possible through a dynamic offset cancellation that utilizes chopper-stabilization. This method reduces the offset voltage normally caused by device over molding, temperature dependencies, and thermal stress. MH188 includes the following on a single silicon chip: voltage regulator, Hall voltage generator, small-signal amplifier, chopper stabilization, Schmitt trigger, Advanced DMOS wafer fabrication processing is used to take advantage of low-voltage requirements, component matching, very low input-offset errors, and small component geometries. This device requires the presence of both south and north polarity magnetic fields for operation. In the presence of a south polarity field of sufficient strength, the device output sensor on, and only switches off when a north polarity field of sufficient strength is present. MH188 is rated for operation between the ambient temperatures –40℃and 85℃for the E temperature range, and –40℃to 125℃for the K temperature range. The two package styles available provide magnetically optimized solutions for most applications. Package SO is an SOT-23, a miniature low-profile surface-mount package, while package UA is a three-lead ultra mini SIP for through-hole mounting. Packages is Halogen Free standard and which have been verified by third party lab. Features and Benefits ●DMOS Hall IC Technology. ●Reverse bias protection on power supply pin. ●Chopper stabilized amplifier stage. ●Optimized for BLDC motor applications. ●Reliable and low shifting on high Temp condition. ●Good ESD Protection. ●100% tested at 125 ℃ for K. ●Custom sensitivity / Temp erature selection are available. Applications ●High temperature Fan motor ● 3 phase BLDC motor application ●Speed sensing ●Position sensing ●Current sensing ●Revolution counting ●Solid-State Switch ●Linear Position Detection ●Angular Position Detection ●Proximity Detection ●High ESD Capability
. 传感器原理及应用期末课程设计题目基于霍尔传感器的转速测量电路设计 姓名小波学号8888888888 院(系)电子电气工程学院 班级清华大学——电子信息 指导教师牛人职称博士后 二O一一年七月十二日
摘要:转速是发动机重要的工作参数之一,也是其它参数计算的重要依据。针对工业上常见的发动机设计了以单片机STC89C51为控制核心的转速测量系统。系统利用霍尔传感器作为转速检测元件,并利用设计的调理电路对霍尔转速传感器输出的信号进行滤波和整形,将得到的标准方波信号送给单片机进行处理。实际测试表明,该系统能满足发动机转速测量要求。 关键词:转速测量,霍尔传感器,信号处理,数据处理
Abstract: The rotate speed is one of the important parameters for the engine, and it is also the important factor that calculates other parameters. The rotate speed measurement system for the common engine is designed with the single chip STC89C51. The signal of the rotate speed is sampled by the Hall sensor, and it is transformed into square wave which will be sent to single chip computer. The result of the experiment shows that the measurement system is able to satisfy the requirement of the engine rotate speed measurement. Key words:rotate speed measurement, Hall sensor, signal processing, data processing
A4954 双路全桥式DMOS PWM 电动机驱动器 特点 ?低R DS(on)输出 ?过电流保护(OCP) 电动机短路保护 o o电动机引脚接地短路保护 o电动机引脚电池短路保护 ?低功耗待机模式 ?可调PWM 电流限制 ?同步整流 ?部欠压锁定(UVLO) ?交叉电流保护 描述 通过脉宽调制(PWM) 控制两个直流电动机,A4954 能够承受峰值输出电流达±2 安培,并使电压达到40 伏特。 输入端通过应用外部PWM 控制信号以控制直流电动机的速度与方向。部同步整流控制电路用来降低脉宽调制(PWM) 操作时的功率消耗。 部电路保护包括过电流保护、电动机接地或电源短路、因滞后引起的过热关机、V BB欠压监视以及交叉电流保护。 A4954 采用带有外置散热板的16 引脚TSSOP 小型封装(后缀LP)。该封装为无铅封装,且引脚框采用100% 雾锡电镀。 ?功能方框图
A4950 全桥式DMOS PWM 电动机驱动器特点 ?低R DS(开)输出 ?过电流保护(OCP) o电动机短路保护 o电动机引脚接地短路保护 o电动机引脚电池短路保护 ?低功耗待机模式 ?可调PWM 电流限制 ?同步整流 ?部欠压锁定(UVLO) ?交叉电流保护
描述 通过脉宽调制(PWM) 控制直流电动机,A4950 能够提供±3.5 安培的峰值输出电流,工作电压为40 伏特。 该产品可提供输入端子,通过外部施加的PWM 控制信号控制直流电动机的速度与方向。采用部同步整流控制电路降低脉宽调制(PWM) 操作时的功率消耗。 部电路保护包括过电流保护、电动机引脚接地短路或电源短路、带时延的过热关机、V BB欠压监视以及交叉电流保护。 A4950 采用带有外露散热板的8 引脚SOICN 小型封装(后缀LJ)。该封装为无铅封装,且引脚框采用100% 雾锡电镀。 ? 功能方框图 A4938 三相无刷直流电动机预驱动器 功能及优点 ?驱动6 N-通道MOSFET ?同步整流,减少功率耗散
霍尔芯片的发展 第一阶段是从霍尔效应的发现到20世纪40年代前期。1910年有人用金属铋制成霍尔元件,但是由于金属材料中的电子浓度很大,而霍尔效应十分微弱,所以几乎没有多大用处。 第二阶段是从20世纪40年代中期,随着半导体材料、制造工艺和技术的应用,出现了各种半导体分立霍尔元件,特别是锗的采用推动了霍尔元件的发展,相继出现了采用霍尔元件制造的各种磁场传感器,应用十分广泛。但是由于温漂的存在,所以精确度受到了一定的限制,并且还需要外加信号调理电路,所以使用较复杂且成本比较高。 第三阶段是自20世纪60年代开始,随着集成电路技术的发展,出现了将霍尔半导体元件和相关的信号调节电路集成在一起的霍尔传感器。由于将霍尔元件和信号调理电路和温度补偿电路集成在一起,因此具有很好的线性度,精确度很高。 第四阶段是20世纪80年代,随着大规模超大规模集成电路和微机械加工技术的进展,霍尔元件从平面向三维方向发展,出现了三端口或四端口固态霍尔传感器,实现了产品的系列化、加工的批量化、体积的微型化。 未来的发展趋势是量子霍尔传感器和等离子霍尔传感器。 一、分立霍尔元件 1、1双极平行元件 采用标准双极(bipolar)工艺制成的霍尔元件,由于电流在外延层内平行于芯片表面流动,因此又称为平行霍尔元件。 1、2垂直元件 采用双极工艺还可以制成垂直霍尔(VH)元件,该霍尔元件的灵敏度较低。为了提高灵敏度而减少电流路径,又研制了扩散型(DVH)和沟道型(TVH)两种垂直霍尔元件 1、2、1 MOS垂直元件 薄MOS沟道作为霍尔元件的激励区,可获得1 000V/AT的灵敏度。 1、2、2 CMOS垂直元件 采用CMOS工艺制成的体型(bulk)垂直霍尔元件,电流从芯片表面流入芯片内部,灵敏度可达450V/AT。 1、2、3 JFET垂直元件 在上述TVH元件的基础上,增加离子反应刻蚀(RIE)工艺,制成了结型场效应管垂直霍尔元件。这种霍尔元件灵敏度可达1 243V/AT。 二、集成霍尔传感器 2、1三维VH磁场传感器 VH传感器是最常见的磁场传感器,它的特点是将电极形成在芯片表面,对平行于芯片表面的磁场敏感,从不同的方向测量该磁场就形成了不同坐标的传感器。 2、2单片硅指南针 采用TLC(tran linear circuit)工艺制成的模拟集成霍尔指南针,它由2个VH元件和信号转换处理电路组成。 2、3全集成三维角度-位置传感器 霍尔传感器芯片平行放在椭圆型永磁铁下面,旋转轴固定在磁铁的中心。当转轴旋转时霍尔传感器将产生正比于转轴角位移的正弦和余弦两个信号,经简单的信号处理即可直接获得得位置信号。
浅谈霍尔电流传感器ACS785/ACS712系列电流检测方式 浅谈电流检测方式 一、检测电阻+运放 优势:成本低、精度较高、体积小 劣势:温漂较大,精密电阻的选择较难,无隔离效果。 分析: 这两种拓扑结构,都存在一定的风险性,低端检测电路易对地线造成干扰;高端检测,电阻与运放的选择要求高。检测电阻,成本低廉的一般精度较低,温漂大,而如果要选用精度高的,温漂小的,则需要用到合金电阻,成本将大大提高。运放成本低的,钳位电压低,而特殊工艺的,则成本上升很多。 二、电流互感器CT/电压互感器PT 在变压器理论中,一、二次电压比等于匝数比,电流比为匝数比的倒数。而CT 和PT 就是特殊的变压器。基本构造上,CT 的一次侧匝数少,二次侧匝数多,如果二次开路,则二次侧电压很高,会击穿绕阻和回路的绝缘,伤及设备和人身。PT 相反,一次侧匝数多,二次侧匝数少,如果二次短路,则二次侧电流很大,使回路发热,烧毁绕阻及负载回路电气。 CT,电流互感器,英文拼写Current Transformer,是将一次侧的大电流,按比例变为适合通过仪表或继电器使用的,额定电流为5A 或1A 的变换设备。它的工作原理和变压器相似。也称作TA 或LH(旧符号). 工作特点和要求: 1、一次绕组与高压回路串联,只取决于所在高压回路电流,而与二次负荷大小无关。 2、二次回路不允许开路,否则会产生危险的高电压,危及人身及设备安全。 3、CT 二次回路必须有一点直接接地,防止一、二次绕组绝缘击穿后产生对地高电压,但仅一点接地。 4、变换的准确性。 PT,电压互感器,英文拼写Phase voltage Transformers,是将一次侧的高电压按比例变为适合仪表或继电器使用的额定电压为100V 的变换设备。电磁式电压互感器的工作原理和变压器相同。也称作TV 或YH(旧符号)。 工作特点和要求: 1、一次绕组与高压电路并联。 2、二次绕组不允许短路(短路电流烧毁PT),装有熔断器。 3、二次绕组有一点直接接地。 4、变换的准确性
吉林建筑工程学院 电气与电子信息工程学院 传感器及检测技术课程设计报告 设计题目: 霍尔元件小车测速系统设计 专业班级: 电子信息科学与技术081班 学生姓名: 赵越 学 号: 10308105 指导教师: 王 超 吴鹤君 设计时间: 2011.12.12-2011.12.23 目 录 教师评语: 成绩 评阅教师 日期
1 绪论 (1) 1.1设计任务 (1) 1.2方案分析论证 (1) 2 基于霍尔传感器的电机转速测量系统硬件设计 (2) 2.1电机转速测量系统的硬件电路设计 (2) 2.2霍尔传感器测量电路设计 (4) 2.3单片机AT89C51 (8) 2.4显示电路设计 (11) 2.5系统软件设计 (14) 3 系统仿真和调试 (16) 3.1Proteus软件 (16) 3.2硬件调试 (17) 3.3软件调试 (19) 3.4软硬件联调 (19) 4 结论 (21) 参考文献 (22) 附录硬件实物图 (23)
1 绪论 1.1 设计任务 1.1.1课程设计目的: 通过《传感器及检测技术》课程设计,掌握传感器及检测系统设计的方法和设计原则及相应的硬件调试的方法。进一步理解传感器及检测系统的设计和应用。 1.1.2课程设计题目: 霍尔元件小车测速系统设计 1.1.3 课程设计内容: 1、霍尔元件测速系统设计 霍尔传感器一般由霍尔元件和磁钢组成,当霍尔元件和磁钢相对运动时,就会产生脉冲信号,根据磁钢和脉冲数量就可以计算转速,进而求出车速。 现要求设计一个测量系统,在小车的适当位置安装霍尔元件及磁钢,使之具有以下功能: 1)LED数码管显示小车的行驶距离(单位:cm)。 2)具有小车前进和后退检测功能,并用指示灯显示。 3)记录小车的行驶时间,并实时计算小车的行驶速度。 4)距离测量误差<2cm。 5)其它。 1.2 方案分析论证 1.2.1 霍尔测速模块论证与选择 方案一:采用型号为A3144的霍尔片作为霍尔测速模块的核心,该霍尔片体积小,安装灵活,价格合理,可用于测速,可与普通的磁钢片配合工作。 方案二:采用型号为CHV-20L的霍尔元器件作为霍尔测速模块的核心,该霍尔器件额定电流为100mA,输出电压为5V,电源为12~15V。体积较大,价格昂贵。 因此选择方案一。 1.2.2 单片机模块论证与选择 方案一:采用型号为AT89C51的单片机作为主控制器,使用霍尔传感器进行测量的直流电机转速测量系统。AT89C51是带4K字节闪烁可编程擦除只读存储器的低电压、高性能CMOS8位微处理器。它将多功能8位CPU和闪烁存储器组合在单个芯片中,为许多控制提供了灵活性高且价格低廉的方案[3]。
1、开环(直放式)霍尔电流传感器 当原边电流I P流过一根长导线时,在导线周围将产生一磁场,这一磁场的大小与流过导线的电流成正比,产生的磁场聚集在磁环内,通过磁环气隙中霍尔元件(如HG-302C)进行测量并放大输出,其输出电压V S精确的反映原边电流I P。一般的额定输出标定为4V。开环霍尔电流传感器的优点是结构简单,可靠性好,过载能力强,体积较小,开环式霍尔电流传感器一般线性度角差,且原边信号在上升和下降过程中副边输出会有不同。开环式霍尔电流传感器精度通常劣于1%。?一般开环电流传感器采用的霍尔是 HG-106A,HG-106C,HG-166A,HG-302A,HG-302C,HG-362A,SS495A,SS495A1。 2、闭环(磁平衡式)霍尔电流传感器 磁平衡式电流传感器也称补偿式传感器,即原边电流Ip在聚磁环处所产生的磁场通过一个次级线圈电流所产生的磁场进行补偿,其补偿电流Is精确的反映原边电流Ip,从而使霍尔器件(如HW-300B,HW-302B)处于检测零磁通的工作状态。 当主回路有一电流通过时,在导线上产生的磁场被磁环聚集并感应到霍尔器件上,所产生的信号输出用于驱动功率管并使其导通,从而获得一个补偿电流Is。这一电流再通过多匝绕组产生磁场,该磁场与被测电流产生的磁场正好相反,因而补偿了原来的磁场,使霍尔器件的输出逐渐减小。当与Ip与匝数相乘所产生的磁场相等时,Is不再增加,这时的霍尔器件起到指示零磁通的作用,此时可以通过Is来测试Ip。当Ip变化时,平衡受到破坏,霍尔器件有信号输出,即重复上述过程重新达到平衡。被测电流的任何变化都会破坏这一平衡。一旦磁场失去平衡,霍尔器件(HW-300B,HW-302B)就有信号输出。经功率放大后,立即就有相应的电流流过次级绕组以对失衡的磁场进行补偿。从磁场失衡到再次平衡,所需的时间理论上不
直流无刷电机 驱动IC 版本号:V1.0 日期:2013年5月28日
一.特色: 三.封装形态 二.简介: ● 军工品质,工作稳定 ● 用于有霍尔/无霍尔无刷电机驱动 ● 正/反转控制,软切换功能 ● 转速线性调节 ● 过流保护 ● 短路保护 ● 欠压保护 ● DSP 核H_PWM 驱动低噪音 ● JYKJ 特有技术,保证了在任何工况下电机都能正常运转 ● 有霍尔与无霍尔应用自动识别功能 ● 外围电路简单,使用方便 JY01A 是一款多功能的无刷电机驱动IC ,可用于有霍尔、无霍尔无刷电机驱动。具备调速,正反转,过流保护,短路保护,欠压保护等功能,军工级品质,工作稳定,防干扰能力强等特点。
四.电气特性: (一)绝对最大额定值 V DD………………………………………………………………………………相对于GND+5.5V 所有输入电压…………………………………………………………GND-0.5V—VDD+0.5V 所有吸入输出电流………………………………………………………… IOL/8mA,IOH/5mA 工作温度…………………………………………………………………………………-40℃~85℃储存温度…………………………………………………………………………………-50℃~125℃ (二)直流特性 符号符号描述最小值典型值最大值单位条件 V DD电源 4.55 5.5V正常工作环境下 V IL 输入IO低电平00.3V TTL电平 V IH 输入IO高电平35 5.5V TTL电平 IOL低电平吸入电流58mA TTL电平 IOH高电平输出电流35mA TTL电平 Vjd模拟输入电平05V模拟输入电平范围 Ijd模拟输入电流100nA模拟输入电流值
课程设计报告书
2.概述 2.1系统组成框图 系统由传感器、信号预处理电路、处理器、显示器和系统软件等部分组成。传感器部分采用霍尔传感器,负责将电机的转速转化为脉冲信号。信号预处理电路包含待测信号放大、波形变换、波形整形电路等部分,其中放大器实现对待测信号的放大,降低对待测信号的幅度要求,实现对小信号的测量;波形变换和波形整形电路实现把正负交变的信号波形变换成可被单片机接受的TTL/CMOS兼容信号。处理器采用AT89C51单片机,显示器采用8位LED数码管动态显示。本课题采用的是以8051系列的A T89C51单片机为核心开发的霍尔传感器测转速的系统。系统硬件原理框图如图1所示: 图1 系统框图 2.2系统工作原理 转速是工程上一个常用的参数,旋转体的转速常以每分钟的转数来表示。其单位为 r/min。由霍尔元件及外围器件组成的测速电路将电动机转速转换成脉冲信号,送至单片机AT89C51的计数器 T0进行计数,用T1定时测出电动机的实际转速。此系统使用单片机进行测速,采用脉冲计数法,使用霍尔传感器获得脉冲信号。其机械结构也可以做得较为简单,只要在转轴的圆盘上粘上两粒磁钢,让霍尔传感器靠近磁钢,机轴每转一周,产生两个脉冲,机轴旋转时,就会产生连续的脉冲信号输出。由霍尔器件电路部分输出,成为转速计数器的计数脉冲。控制计数时间,即可实现计数器的计数值对应机轴的转速值。单片机CPU将该数据处理后,通过LED显示出来。
2.2.1霍尔传感器 霍尔传感器是对磁敏感的传感元件,由磁钢、霍耳元件等组成。测量系统的转速传感器选用SiKO 的 NJK-8002D 的霍尔传感器,其响应频率为100KHz ,额定电压为5-30(V )、检测距离为10(mm )。其在大电流磁场或磁钢磁场的作用下,能测量高频、工频、直流等各种波形电流。该传感器具有测量精度高、电压范围宽、功耗小、输出功率大等优点,广泛应用在高速计数、测频率、测转速等领域。输出电压4~25V ,直流电源要有足够的滤波电容,测量极性为N 极。安装时将一非磁性圆盘固定在电动机的转轴上,将磁钢粘贴在圆盘边缘,磁钢采用永久磁铁,其磁力较强,霍尔元件固定在距圆盘1-10mm 处。当磁钢与霍尔元件相对位置发生变化时,通过霍尔元件感磁面的磁场强度就会发生变化。圆盘转动,磁钢靠近霍尔元件,穿过霍尔元件的磁场较强,霍尔元件输出低电平;当磁场减弱时,输出高电平,从而使得在圆盘转动过程中,霍尔元件输出连续脉冲信号。这种传感器不怕灰尘、油污,在工业现场应用广泛。 2.2.2转速测量原理 霍尔器件是由半导体材料制成的一种薄片,器件的长、宽、高分别为 l 、b 、d 。若在垂直于薄片平面(沿厚度 d )方向施加外磁场B ,在沿l 方向的两个端面加一外电场,则有一定的电流流过。由于电子在磁场中运动,所以将受到一个洛仑磁力,其大小为:qVB f = 式中:f —洛仑磁力, q —载流子电荷, V —载流子运动速度, B —磁感应强度。 这样使电子的运动轨迹发生偏移,在霍尔元器件薄片的两个侧面分别产生电子积聚或电荷过剩,形成霍尔电场,霍尔元器件两个侧面间的电位差H U 称为霍尔电压。 霍尔电压大小为: H U H R =d B I /??(mV) 式中:H R —霍尔常数, d —元件厚度,B —磁感应强度, I —控制电流 设 H K H R =d /, 则H U =H K d B I /??(mV) H K 为霍尔器件的灵敏系数(mV/mA/T),它表示该霍尔元件在单位磁感应强度和 单位控制电流下输出霍尔电动势的大小。应注意,当电磁感应强度B 反向时,霍尔电动势也反向。图2为霍耳元件的原理结构图。
第八章霍尔传感器 课题:霍尔传感器的原理及应用课时安排:2 课次编号:12 教材分析 难点:开关型霍尔集成电路的特性 重点:霍尔传感器的应用 教学目的和要求1、了解霍尔传感器的工作原理; 2、了解霍尔集成电路的分类; 3、掌握线性型和开关型霍尔集成电路的特性; 4、掌握霍尔传感器的应用。 采用教学方法和实施步骤:讲授、课堂互动、分析教具:各种霍尔元 件、霍尔传感器 各教学环节和内容 演示1: 将小型蜂鸣器的负极接到霍尔接近开关的OC门输出 端,正极接V cc端。在没有磁铁靠近时,OC门截止,蜂鸣 器不响。 当磁铁靠近到一定距离(例如3mm)时,OC门导通, 蜂鸣器响。将磁铁逐渐远离霍尔接近开关到一定距离(例 如5mm)时,OC门再次截止,蜂鸣器停响。 演示2: 将一根导线穿过10A霍尔电流传感器的铁芯,通入0.1~1A电流,观察霍尔IC的输出电压的变化,基本与输入电流成正比。 从以上演示,引入第一节霍尔效应、霍尔元件的工作原理。 第一节霍尔元件的工作原理及特性 一、工作原理 金属或半导体薄片置于磁感应强度为B的磁场中,磁场方向垂直于薄片,当有电流I流过薄片时,在垂直于电流和磁场的方向上将产生电动势E H,这种现象称为霍尔效应(Hall Effect),该电动势称为霍尔电动势(Hall EMF),上述半导体薄片称为霍尔元件(Hall Element)。用霍尔元件做成的传感器称为霍尔传感器(Hall Transducer)。
图8-1霍尔元件示意图 a)霍尔效应原理图b)薄膜型霍尔元件结构示意图c)图形符号d)外形霍尔属于四端元件: 其中一对(即a、b端)称为激励电流端,另外一对(即c、d端)称为霍尔电动势输出端,c、d端一般应处于侧面的中点。 由实验可知,流入激励电流端的电流I越大、作用在薄片上的磁场强度B越强,霍尔电动势也就越高。霍尔电动势E H可用下式表示 E H=K H IB(8-1)式中K H——霍尔元件的灵敏度。 若磁感应强度B不垂直于霍尔元件,而是与其法线成某一角度θ时,实际上作用于霍尔元件上的有效磁感应强度是其法线方向(与薄片垂直的方向)的分量,即B cosθ,这时的霍尔电动势为 E H=K H IB cosθ(8-2) 从式(8-2)可知,霍尔电动势与输入电流I、磁感应强度B成正比,且当B的方向改变时,霍尔电动势的方向也随之改变。如果所施加的磁场为交变磁场,则霍尔电动势为同频率的交变电动势。 目前常用的霍尔元件材料是N型硅,霍尔元件的壳体可用塑料、环氧树脂等制造。 二、主要特性参数 (1)输入电阻R i恒流源作为激励源的原因:霍尔元件两激励电流端的直流电阻称为输入电阻。它的数值从几十欧到几百欧,视不同型号的元件而定。温度升高,输入电阻变小,从而使输入电流I ab变大,最终引起霍尔电动势变大。使用恒流源可以稳定霍尔原件的激励电流。 (2)最大激励电流I m激励电流增大,霍尔元件的功耗增大,元件的温度升高,从而引起霍尔电动势的温漂增大,因此每种型号的元件均规定了相应的最大激励电流,它的数值从几毫安至十几毫安。 提问:霍尔原件的最大激励电流I m为宜。 A.0mA B.±0.1 mA C.±10mA D.100mA (4)最大磁感应强度B m磁感应强度超过B m时,霍尔电动势的非线性误差将明显增大,B m的数值一般小于零点几特斯拉。 提问:为保证测量精度,图8-3中的线性霍尔IC的磁感应强度不宜超过为宜。 A.0T B.±0.10T C.±0.15T D.±100Gs
目录 一、课程设计目的与要求 (2) 二、元件介绍 (3) 三、课程设计原理 (6) 3.1霍尔效应 (6) 3.2测磁场的原理,载流长直螺线管内的磁感应强度 (8) 四、课程设计内容 (10) 4.1电路补偿调节 (10) 4.2失调电压调零 (10) 4.3按图4-3接好信号处理电路 (10) 4.4按图4-4接好总测量电路 (11) 4.5数据记录与处理 (12) 4.6数据拟合 (14) 五、成品展示 (16) 六、分析与讨论 (17) 实验所需仪器 (19) 个人总结 (20) 致谢 (21) 参考文献 (22) 参考网址 (22)
一、课程设计目的与要求 1.了解霍尔传感器的工作原理 2.掌握运用霍尔传感器测量磁场的方法
二、元件介绍 CA3140 CA3140高输入阻抗运算放大器,是美国无线电公司研制开发的一种BiMOS高电压的运算放大器在一片集成芯片上,该CA3140A和CA3140 BiMOS运算放大器功能保护MOSFET的栅极(PMOS上)中的晶体管输入电路提供非常高的输入阻抗,极低输入电流和高速性能。操作电源电压从4V至36V(无论单或双电源),它结合了压电PMOS晶体管工艺和高电压双授晶体管的优点.(互补对称金属氧化物半导体)卓越性能的运放。 应用范围: .单电源放大器在汽车和便携式仪表 .采样保持放大器 .长期定时器 .光电仪表 .探测器 .有源滤波器 .比较器 .TTL接口 .所有标准运算放大器的应用 .函数发生器 .音调控制 .电源 .便携式仪器
3503霍尔元件 UGN3503LT,UGN3503U和UGN3503UA霍尔效应传感器准确地跟踪磁通量非常小的变化,密度变化通常太小以致不方便操作霍尔效应开关。 可作为运动探测器,齿传感器和接近探测器,磁驱动机械事件的镜像。作为敏感电磁铁的显示器,就可以有效地衡量一个系统的负载量可以忽略不计的性能,同时提供隔离污染和电气噪声。 每个霍尔效应集成电路包括一个霍尔传感元件,线性放大器和射极跟随器输出级。 三种封装形式提供了对磁性优化包大多数应用程序。封装后缀“LT”是一个缩影SOT-89/TO243AA表面贴装应用的晶体管封装;后缀“U”是一个微型三引脚塑料SIP,而'UA'是一个三引脚超小型SIP协议。所有器件的额定连续运行温度范围为-20 °C至+85°C。 特点: ·极为敏感 ·至23 kHz的平坦的响应Array·低噪声输出 ·4.5 V至6 V的操作 ·磁性优化装箱 图2-4 3503霍尔元件封装及引脚图
Features and Benefits ? Built-in Reverse Voltage Protection ? Built-in RFI Filter ? Power Efficient CMOS and Power MOSFET Drivers allow 400mA without overheating ? Built-in Zener Diodes Protect Outputs ? Eliminate all Fan Components ? Eliminate PC Board ? 5V and 12V Operation ? High Sensitivity for switching symmetry ? Locked Rotor Shutdown Applications ? Fan sizes up to 90mm ? Current range up to 400mA Ordering Information Part No. Temperature Suffix Package Code US79 K (-40°C to 125°C) UA (TO-92 flat) 1. Functional Diagram 2. Description The US79KUA is the most advanced Smart Fan Control Hall IC. It is designed for 5V and 12V cooling commutation. The chip contains many features to allow survival in a harsh environment. The IC was designed to eliminate all discrete components such as capacitors, resistors, transistors, diodes, PC board and associated labor, replacing US$0.25 to US$0.35 in direct cost. The K rating guarantees proper operation up to an ambient temperature of 125°C. Hall IC circuitry and power FET output provide a low power dissipation cool chip. Locked Rotor conditions are detected by the IC when there is no motion for one second and will shut off the motor drive for five seconds. Then, the IC will turn on the drive current for one second. This sequence continues indefinitely until the locked rotor condition is fixed. This feature prevents overheating.