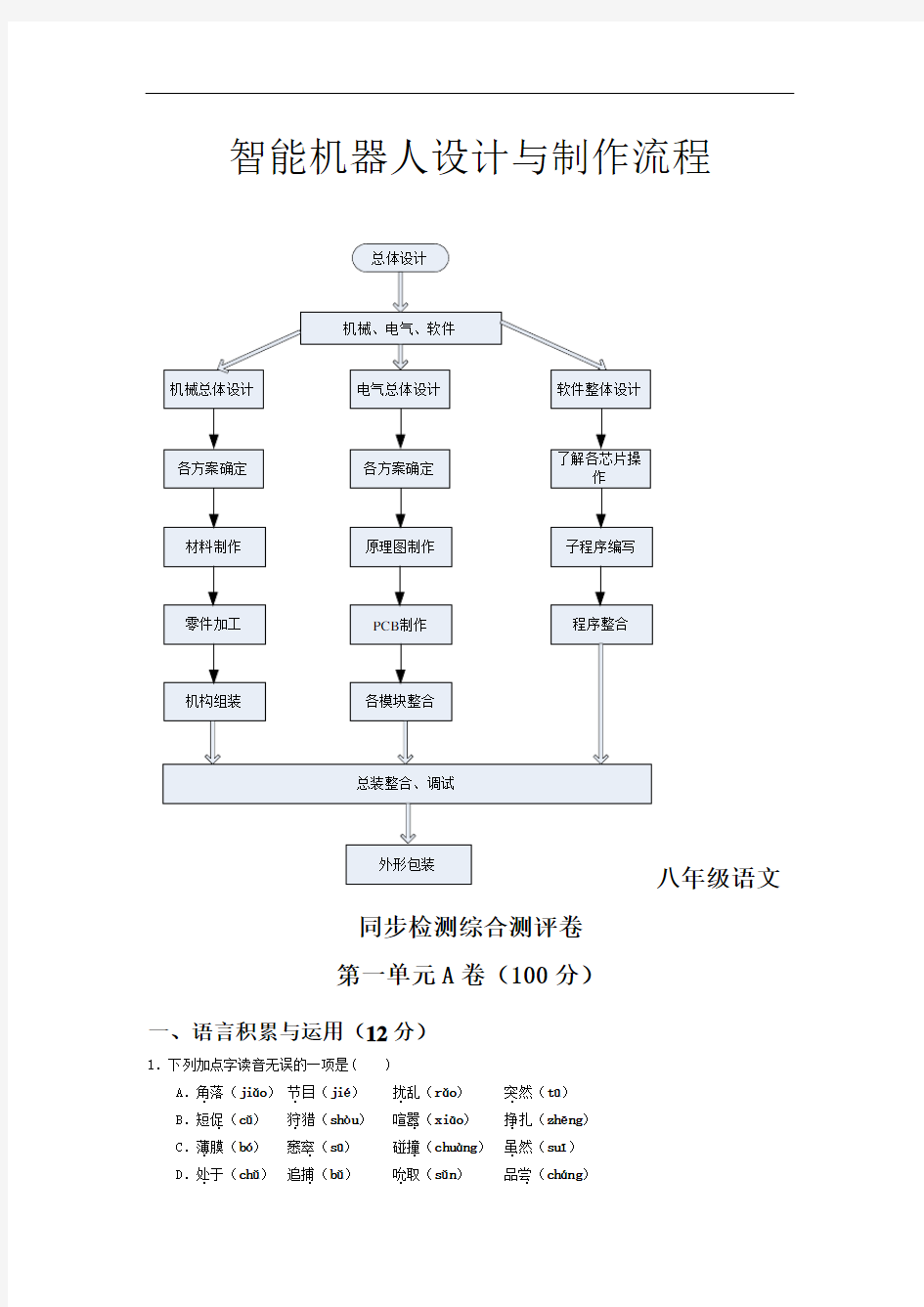

智能机器人设计与制作流程
同步检测综合测评卷
第一单元A卷(100分)
一、语言积累与运用(12分)
1.下列加点字读音无误的一项是( )
A.角.落(jiǎo)节.目(jié)扰.乱(rǎo)突.然(tū)
B.短促.(cǔ)狩.猎(shòu)喧嚣.(xiāo)挣.扎(zhēng)
C.薄.膜(bó)窸窣.(sū)碰撞.(chuàng)虽.然(suī)
D.处.于(chǔ)追捕.(bǔ)吮.取(sǔn)品尝.(cháng)
2.下列词语中无错别字的一项是( )
A.眼花嘹乱晨曦血腥闪烁
B.臭名昭著荒谬憧憬珐琅
C.响彻云宵杀戮箱箧揣摩
D.精疲力竭纳粹鞠恭铁锈
3.依次填入下面横线的词语恰当的是( )
我已歼灭及击溃一切抵抗之敌,扬中、镇江、江阴诸县的广大地区,并江阴要塞,长江。
A.占有牵制封锁
B.占领控制封锁
C.占领控制封闭
D.占有牵制封锁
6. 选出没有语病的一项()
A.全班同学和团员在课堂上都能积极发言。
B.一只狗和一只麻雀看来该是多么大的怪物啊!
C.通过这次丰富多彩的活动,使我们明白了许多做人的道理。
D.我国的人口占世界的五分之一是世界上最多的国家。
二、默写(6分)
7.描写洞庭湖的名句是,。
8《长歌行》一诗中借流水喻时光飞逝的诗句是:
, 。
9.《野望》一诗中表现诗人孤独抑郁心情的诗句是:
,。
三、语言运用(12分)
10. 仿照下面前后句子的写法,在中间写出一句话。(2分)
在与同学的交往中,我日渐感悟出:给别人一缕阳光,你也会感受到阳光的温暖与色彩;给别人,你也会;给别人一点快乐,你也会感觉到快乐的美好与充实。
11.按照例句的形式写下面的句子(不要改变句子愿意)(2分)
例:山间炊烟袅袅,如丝如缕。
江山飘着一片片白帆,像一幅画,又像一首诗。
12.
在2008年奥运会总共700余万张的可售门票中,北京奥组委专门为青少年奥林匹克教育计划预留了百分之十四的门票,将定向销售给全国中小学生以及青少年运动员。这部分门票价格极低,预赛票价仅有5元,决赛票价也只有10元。此举最大限度地为中国青少年观看奥运会提供了机会。
13.名著试练(4分)
《骆驼祥子》中祥子几次想买车?次。他一生的经历可用四个字来概括,是哪四个字?
。
《朝花夕拾》共收拾10篇回忆性散文,我们已经学过的课文有《从百草园到三味书屋》和《》,请写出另外一篇《》。
五、阅读与理解(30分)
(一)俄外长表示---------反对武力解决伊武器核查问题(12分)
(新华社莫斯科1月14日电)(1)俄罗斯外长普里马科夫14日在与美国国务卿奥尔布赖特进行电话交谈时表示,俄罗斯反对动用武力解决与伊拉克武器核查有关的问题。
(2)据国际文传电讯社援引俄外交部发言人涅斯捷鲁什金的话报道,双方在交谈中强调了伊拉克同负责武器核查工作的联合国销毁伊拉克生物、化学和核武器特别委员会合作的重要性。
(3)普里马科夫同时重申,由此产生的问题用武力解决是不能接受的。
人工智能课程教学大纲 【课程编码】JSZX0300 【适用专业】计算机科学与技术 【课时】 72(理论)+28(实验) 【学分】 3 【课程性质、目标和要求】 人工智能是计算机科学的重要分支,是计算机科学与技术专业本科生的专业限选课之一。本课程介绍如何用计算机来模拟人类智能,即如何用计算机实现诸如问题求解、规划推理、模式识别、知识工程、自然语言处理、机器学习等只有人类才具备的"智能",使得计算机更好得为人类服务. 作为本科生一个学期的课程,重点掌握人工智能的基础知识和基本技能,以及人工智能的一般应用.完成如下教学目标: (1)了解人工智能的概念和人工智能的发展,了解国际人工智能的主要流派和路线,了解国内人工智能研究的基本情况,熟悉人工智能的研究领域. (2)较详细地论述知识表示的各种主要方法。重点掌握状态空间法、问题归约法和谓词逻辑法,熟悉语义网络法,了解知识表示的其他方法,如框架法、剧本法、过程法等。 (3)掌握盲目搜索和启发式搜索的基本原理和算法,特别是宽度优先搜索、深度优先搜索、等代价搜索、启发式搜索、有序搜索、A*算法等.了解博弈树搜索、遗传算法和模拟退火算法的基本方法. (4) 掌握消解原理、规则演绎系统和产生式系统的技术、了解不确定性推理、非单调推理的概念. (5)概括性地介绍人工智能的主要应用领域,如专家系统、机器学习、规划系统、自然语言理解和智能控制等. (6)简介人工智能程序设计的语言和工具. (7) 掌握Visual Prolog编程环境,会使用Prolog语言编写简单的智能程序。 要求学生已修过《数据结构》、《离散数据》和《编译原理》。 【教学时间安排】 本课程计 3 学分,理论课时72 ,实验课时28。学时分配如下表所示:
一种智能机器人系统设计和实现 我们从广泛意义上理解所谓的智能机器人,它给人的最深刻的印象是一个独特的进行自我控制的"活物".其实,这个自控"活物"的主要器官并没有像真正的人那样微妙而复杂。智能机器人具备形形色色的内部信息传感器和外部信息传感器,如视觉、听觉、触觉、嗅觉。除具有感受器外,它还有效应器,作为作用于周围环境的手段。这就是筋肉,或称自整步电动机,它们使手、脚、长鼻子、触角等动起来。我们称这种机器人为自控机器人,以便使它同前面谈到的机器人区分开来。它是控制论产生的结果,控制论主张这样的事实:生命和非生命有目的的行为在很多方面是一致的。正像一个智能机器人制造者所说的,机器人是一种系统的功能描述,这种系统过去只能从生命细胞生长的结果中得到,现在它们已经成了我们自己能够制造的东西了 嵌入式是一种专用的计算机系统,作为装置或设备的一部分。通常,嵌入式系统是一个控制程序存储在ROM中的嵌入式处理器控制板。事实上,所有带有数字接口的设备,如手表、微波炉、录像机、汽车等,都使用嵌入式系统,有些嵌入式系统还包含操作系统,但大多数嵌入式系统都是是由单个程序实现整个控制逻辑。嵌入式技术近年来得到了飞速的发展,但是嵌入式产业涉及的领域非常广泛,彼此之间的特点也相当明显。例如很多行业:手机、PDA、车载导航、工控、军工、多媒体终端、网关、数字电视…… 1 智能机器人系统机械平台的搭建 智能机器人需要有一个无轨道型的移动机构,以适应诸如平地、台阶、墙壁、楼梯、坡道等不同的地理环境。它们的功能可以借助轮子、履带、支脚、吸盘、气垫等移动机构来完成。在运动过程中要对移动机构进行实时控制,这种控制不仅要包括有位置控制,而且还要有力度控制、位置与力度混合控制、伸缩率控制等。智能机器人的思考要素是三个要素中的关键,也是人们要赋予机器人必备的要素。思考要素包括有判断、逻辑分析、理解等方面的智力活动。这些智力活动实质上是一个信息处理过程,而计算机则是完成这个处理过程的主要手段。 机器人前部为一四杆机构,使前轮能够在一定范围内调节其高度,主要功能是在机器人前部遇障碍时,前向连杆机构随车轮上抬,而遇到下凹障碍时前车轮先下降着地,以减小震动,提高整机平稳性。在主体的左右两侧,分别配置了平行四边形侧向被动适应机构,该平行四边形机构与主体之间通过铰链与其相连接,是小车行进的主要动力来源。利用两侧平行四边形可任意角度变形的特点,实现自适应各种障碍路面的效果。改变平行四边形机构的角度,可使左右两侧车轮充分与地面接触,使机器人的6个轮子受力尽量均匀,加强机器人对不同路面的适应能力,更加平稳地越过障碍,并且更好地保证整车的平衡性。主体机构主要起到支撑与连接机器人各个部分的作用,同时,整个机器人
人工智能与机器人
1 1.机器人定义的三个共有属性是:有类人的功能、根据人的编程能自动的工作、人造的机器或机械电子装置。 2.简述机器人的发展史? 1954年美国人(George C. Devol)乔治·德沃尔制造出世界上第一台可编程的机器人,并在1956年获得美国专利。 1959年德沃尔与美国发明家约瑟夫·英格伯格联手制造出第一台工业机器人。 1960年,Conder公司购买专利并制造了样机。 1961年,Unimation公司(通用机械公司)成立,生产和销售了第一台工业机器“Unimate”,即万能自动之意。 1962年,美国万能自动化(Unimation)公司的第一台机器人Unimate在美国通用汽车公司(GM)投入使用标志着第一代机器人的诞生。 1963年麦卡锡则开始在机器人中加入视觉传感系统。 1965年 MIT推出了世界上第一个带有视觉传感器。 1967年, Unimation公司第一台喷涂用机器人出口到日本川崎重工业公司。 1968年,第一台智能机器人Shakey在斯坦福研究所诞生。 1972年,IBM公司开发出直角坐标机器人。 1973年,Cincinnati Milacron公司推出T3型机器人。 1978年,第一台PUMA机器人在Unimation公司诞生 1998年世界著名玩具厂商丹麦乐高(LEGO)公司推出机器人(Mind-storms)套件,让机器人制造变得跟搭积木一样, 1999年日本索尼公司推出犬型机器人爱宝(AIBO)。 2002年5月2日本田制造的名叫阿西(Asimo)四英尺高的白色机器人摇响开市铃声,摇响了机器智能时代的开始。 2006年6月,微软公司推出基于Windows的开发环境,用于构建面向各种硬件平台的软件---Microsoft Robotics Studio,试图实现机器人统一的标准或平台。
附件1 广东财经大学华商学院课程教学大纲模板 一、课程简介 人工智能是计算机与自动化学科的一门分支学科。它研究如何用机器来模仿人脑所从事的推理、证明、识别、理解、学习、规划、诊断等智能活动。人工智能是当前科学技术中正在迅速发展,新思想、新观点、新技术不断涌现的一个学科,也是一门涉及数学、计算机科学、控制论、信息论、心理学、哲学等学科的交叉和边缘学科。人工智能原理是计算机科学技术类专业的应用学科。前修课程包括:离散数学、数据结构、算法分析与设计等,后续课程:专家系统,知识工程。 二、教学目标 (1)熟练掌握图搜索策略,熟练掌握回溯策略、图搜索策略的过程以及算法(BACKTRACK 以及AI算法),掌握一些典型问题的启发式函数; (2)掌握用命题逻辑、一阶逻辑表示知识的方法,并在此基础上进行推理,熟练掌握归结方法以及归结反驳过程,熟练掌握利用归结反驳方法进行推理。 (3)掌握基于贝叶斯规则的不确定性推理,掌握条件概率、独立、条件独立及贝叶斯公式;掌握利用贝叶斯定理检测垃圾邮件的基本方法。 三、主要教学模式和教学手段 1.本课程的教学包括课堂讲授、课外作业、辅导答疑、上机实验和期末考试等教学环节。
2.课堂教学采用启发式教学方法,理例结合,多媒体并用,引导学生加深对课程内容的理解,提高学生的学习兴趣和效果。 3.理论联系实际,通过本课程的教学,力争使学生在理解和掌握大纲所要求的知识内容的基础上,能正确地运用这些知识解决有关实际问题。 四、教学内容(要求编写所有章节的主要内容) 第一章人工智能概述 基本内容和要求: 1.人工智能的概念与目标; 2.人工智能的研究内容与方法; 3.人工智能的分支领域; 4.人工智能的发展概况。 第二章逻辑程序设计语言Prolog 基本内容和要求: 1.掌握Prolog语言的语句特点、程序结构和运行机理; 2.能编写简单的Prolog程序,能读懂一般的Prolog程序。 教学重点: Prolog程序设计。 教学难点: 表与递归,回溯控制 第三章基于图搜索的问题求解 基本内容和要求: 1.掌握状态图的基本概念、状态图搜索基本技术和状态图问题求解的一般方法,包括穷举式搜索、启发式搜索、加权状态图搜索和A算法、A*算法等; 2.掌握与或图的基本概念、与或图搜索基本技术和或图问题求解的一般方法; 3.理解一些经典规划调度问题(如迷宫、八数码、梵塔、旅行商、八皇后等问题)的求解方法; 教学重点:
智能机器人创新设计 This model paper was revised by the Standardization Office on December 10, 2020
智能机器人创新设计 第一阶段 智能机器人作品创新设计 智能机器人创新设计评选的目的是为了激发青少年的创新意识,鼓励机器人爱好者在机器人开发和使用中自主创新,以创新为主题,设计制作各种新颖的机器人项目,实现机器人的机械、电子、气动、软件以及传感器等方面的扩展应用,从而推动机器人应用的不断发展。 一.创新设计选题 智能机器人创新设计第一步是选题,选题应该遵循以下基本原则。 1.题目来源于生活,服务于生活 2.科学性、新颖性、展示性。 3.根据自身能力判断可行性。 二.创新设计途径 1.模仿:在已有成果的基础上,充分利用智能机器人技术,模仿其结构和控制原理。在过程中实践,在实践中应用。 2.改进:在参考原有功能和设计结构的基础上,进一步丰富和完善智能系统,使之功能更全面,更高效。 3.发明创造:历史上没有的。 三.评选原则 1.可行性原则:所设计的机器人应具备良好的可操作性和安全性。作品完成后还应充分考虑到其他人员在使用时是否能顺利启动,或者使其经过一定的努力也可以完成某一项功能或任务。鼓励设计者利用现有资源,整合费旧材料以最少的资本投入完成相关活动,显现出环保节能意识。 2.创新性原则:创新是技术活动的本质所在,在设计机器人作品时,师生应根据日常生活经验,展开丰富、科学的联想,并积极附注于实践。创造新方法、新成果、新价值。 3.智能性原则:机器人创新设计不同于一般的科技发明,其核心重在体现作品自身的智能化(如感知、规划、动作和协同等能力)。设计好的机器人创新作品可按照周围环境所提供的信息,利用各种传感器和动力装置进行信息的获取和输出,并能按照预设的程序指令决定自己的行动,要有一定的自主能力。这也正是机器人创新设计的魅力所在。
一、认识机器人 [教学目标] 知识目标:了解机器人的概念、特征、分类与用途,简单了解机器人的发展历程。 技能目标:熟练利用网络查找信息和处理信息。 情感目标:培养学生对机器人的兴趣,培养学生关心科技、热爱科学、勇于探索的精神。 [教学重点与难点] 教学重点:机器人的概念、特征;学生的自学能力和探索精神的培养。 难点分析:机器人的概念及其特征;学生自我评价。 [案例描述] 片断1 观看视频引入教学内容 师:21世纪被信息技术专家誉为智能机器人的时代,机器人在各行各业将得到更加广泛的应用,机器人技术综合机械工程、电子工程、传感器应用、信息技术、数学、物理等多种学科,它代表着一个国家的高科技发展水平。同学们在生活中有没有接触过机器人?在影视作品中的机器人是什么样的?请同学给大家描述一下。 学生积极举手描述自己生活中、电影中见过的机器人,课堂气氛活跃,教师适时导入新课: 师:下面请同学们看一段关于智能机器人的视频。(教师播放关于机器人比赛的视频) 观看过后:同学们举了这么多机器人的例子,我们从刚才的视频上也看到机器人具有类似人类的形体和较高的智能。那么,到底什么是机器人呢?是不是只有在高科技实验室、科幻电影里面具有与人类相似的形体的才叫机器人呢? 学生开始讨论,问题初步涉及到机器人的特征方面。 师:现实生活中,机器人无处不在,并在我们的生活中起着重要的作用。你是否注意过商场的自动门、街头的取款机?这就是机器人!机器人就在我们身边!那么人们是怎么定义机器人的呢? 片断2 以任务为驱动开展教学 师:请同学们自学课本内容回答以下问题 1、什么是机器人? 2、机器人有什么特征?结合机器人的特征回答为什么商场的自动门、街头的取款 机也称为机器人? 学生阅读课本内容,总结归纳知识点。几分钟后,大部分学生总结出自己的答案,开始踊跃举手。 学生1:机器人是一种具有类似某些生物器官功能、用以完成特定操作和移动任务的、可通过编程来控制的机械电子装置。 学生2:机器人应该是由计算机控制的通过编排程序具有某些功能的机械。 师:从同学们的回答中可以看出机器人的外表不必像人,只要在功能上能模拟生物的动作和行为,都可以称作机器人。下面请同学们总结机器人的基本特征。 学生回答自己归纳、总结的机器人特征: 1.大脑:控制机器人的程序。 2.动作:任何机器人都有一定的动作表现。 3.身体:是一种物理状态,具有一定的形态。 师:回过头来,我们看看刚才谈到的商场自动门是不是机器人(与以上特征一一比对,得出它是机器人的结论)。 师:下面请同学们思考,你们面前的电脑是不是机器人?为什么? 教师扩展知识引出机器与机器人的区别:
智能机器人设计报告 参赛者:庆东肖荣于腾飞 班级:级应用电子技术 指导老师:远明 日期:年月日 一、元器件清单: ,,,,,,,蜂鸣器,光敏电阻,光敏三极管,电阻、电容若干,超亮及普通发光管。二、主要功能: 本设计按要求制作了一个简易智能电动车,它能实现的功能是:从起跑线出发,沿引导线到达点。在此期间检测到铺设在白纸下的薄铁片,并实时存储、显示在“直道区”检测到的薄铁片数目。电动车到达点以后进入“弯道区”,沿圆弧引导线到达点继续行驶,在光源的引导下,利用轻触开关传来的电信号通过障碍区进入停车区并到达车库,完成上述任务后能够立即停车,全程行驶时间越少越好。 本寻迹小车是以有机玻璃为车架,单片机为控制核心,加以减速电机、光电传感器、光敏三极管、轻触开关和电源电路以及其他电路构成。系统由通过口控制小车的前进后退以及转向。寻迹由超亮发光二极管及光敏电阻完成,避障由轻触开关完成,寻光由光敏三极管完成。 并附加其他功能: .声控启动 .数码显示 .声光报警 三、主体设计 车体设计 左右两轮分别驱动,后万向轮转向的方案。为了防止小车重心的偏移,后万向轮起支撑作用。对于车架材料的选择,我们经过比较选择了有机玻璃。用有机玻璃做的车架比塑料车架更加牢固,比铁制小车更轻便,美观。而且裁减比较方便! 电机的固定采用的是铝薄片加螺丝固定,非常牢固,且比较美观。 轮子方案 在选定电机后,我们做了一个万向轮,万向轮的高度减去电机的半径就是驱动轮的半径。轮子用有机玻璃裁出来打磨光华的,上面在套上自行车里胎,以防止打滑。 万向轮 当小车前进时,左右两驱动轮与后万向轮形成了三点结构,这种结构使得小车在前进时比较平稳。
《人工智能》教学大纲 课程名称:人工智能 英语名称:Artificial Intelligence 课程代码:130234 课程性质:专业必修 学分学时数: 5/80 适用专业:计算机应用技术 修(制)订人: 修(制)订日期:2009年2月 审核人: 审核日期: 审定人: 审定日期: 一、课程的性质和目的 (一)课程性质 人工智能是计算机科学理论基础研究的重要组成部分,人工智能课程是计算机科学技术专业的专业拓展选修课。通过本课程的学习使学生了解人工智能的提出、几种智能观、重要研究领域,掌握人工智能求解方法的特点。掌握人工智能的基本概念、基本方法,会用知识表示方法、推理方法和机器学习等方法求解简单问题等。 (二)课程目的 1、基本理论要求: 课程介绍人工智能的主要思想和基本技术、方法以及有关问题的入门知识。要求学生了解人工智能的主要思想和方法。 2、基本技能要求: 学生在较坚实打好的人工智能数学基础(数理逻辑、概率论、模糊理论、数值分析)上,能够利用这些数学手段对确定性和不确定性的知识完成推理;在理解Herbrand 域概念和Horn 子句的基础上,应用Robinson 归结原理进行定理证明;应掌握问题求解(GPS )的状态空间法,能应用几种主要的盲目搜索和启发式搜索算法(宽度优先、深度优先、有代价的搜索、A 算法、A*算法、博弈数的极大—极小法、α―β剪枝技术)完成问题求解;并能熟悉几种重要的不确定推理方法,如确定因子法、主观Bayes 方法、D —S 证据理论等,利用数值分析中常用方法进行正确计算。 3、职业素质要求:结合实战,初步理解和掌握人工智能的相关技术。 二、教学内容、重(难)点、教学要求及学时分配 第一章:人工智能概述(2学时) …… ………………………………………………………………装……订……线…………………………………………………………………………………………………………… …………………………
智能机器人的设计与制作WORD版本可编辑
智能机器人的设计与制作 引言 近几年机器人已成为高技术领域内具有代表性的战略目标。机器人技术的出现和发展,不但使传统的工业生产面貌发生根本性变化,而且将对人类社会产生深远的影响。随着社会生产技术的飞速发展,机器人的应用领域不断扩展。从自动化生产线到海洋资源的探索,乃至太空作业等领域,机器人可谓是无处不在。目前机器已经走进人们的生活与工作,机器人已经在很多的领域代替着人类的劳动,发挥着越来越重要的作用,人们已经越来越离不开机器人帮助。机器人工程是一门复杂的学科,它集工程力学、机械制造、电子技术、技术科学、自动控制等为一体。目前对机器人的研究已经呈现出专业化和系统化,一些信息学、电子学方面的先进技术正越来越多地应用于机器人领域。目前机器人行业的发展与30 年前的电脑行业极为相似。今天在汽车装配线上忙碌的一线机器人,正是当年大型计算机的翻版。而机器人行业的利基产品也同样种类繁多,比如协助医生进行外科手术的机械臂、在伊拉克和阿富汗战场上负责排除路边炸弹的侦察机器人、以及负责清扫地板的家用机器人,还有不少参照人、狗、恐龙的样子制造机器人玩具。舞蹈机器人具有人类外观特征、可爱的外貌、又兼有技术含量,极受青少年的喜爱。我从前年开始机器人方面的研究,在这过程中尝试过很多次的失败,也感受到了无比的乐趣。 图1.1、机器人 1 绪论
机器人技术作为20 世纪人类最伟大的发明之一,自20 世纪60 年代初问世以来,经历40 余年的发展已取得长足的进步。未来的机器人是一种能够代替人类在非结构化环境下从事危险、复杂劳动的自动化机器,是集机械学、力学、电子学、生物学、控制论、计算机、人工智能和系统工程等多学科知识于一身的高新技术综合体。走向成熟的工业机器人,各种用途的特种机器人的多用化,昭示着机器人技术灿烂的明天。 1.1 国内外机器人技术发展的现状 为了使机器人能更好的应用于工业,各工业发达国家的大学、研究机构和大工业企业对机器人系统开发投入了大量的人力财力。在美国和加拿大,各主要大学都设有机器人研究室,麻省理工学院侧重于制造过程机器人系统的研究,卡耐基—梅隆机器人研究所侧重于挖掘机器人系统的研究,而斯坦福大学则着重于系统应用软件的开发。德国正研究开发“MOVE AND PLAY”机器人系统,使机器人操作就像人们操作录像机、开汽车一样。从六十年代开始日本政府实施一系列扶植政策,使日本机器人产业迅速发展起来,经过短短的十几年。到80 年代中期,已一跃而为“机器人王国”。其机器人的产量和安装的台数在国际上跃居首位。按照日本产业机器人工业会常务理事米本完二的说法:“日本机器人的发展经过了60 年代的摇篮期。70 年代的实用期。到80 年代进人普及提高期。” 并正式把1980 年定为产业机器人的普及元年”。开始在各个领域内广泛推广使用机器人。中国机器人的发展起步较晚,1972 年我国开始研制自己的工业机器人。"七五"期间,国家投入资金,对工业机器人及其零部件进行攻关,完成了示教再现式工业机器人成套技术的开发,研制出了喷涂、点焊、弧焊和搬运机器人。1986 年国家高技术研究发展计划(863 计划)开始实施,智能机器人主题跟踪世界机器人技术的前沿,经过几年的研究,取得了一大批科研成果,成功地研制出了一批特种机器人。20 世纪90 年代,我国的工业机器人又在实践中迈进一大步,先后研制出了点焊、装配、喷漆、切割、搬运等各种用途的工业机器人,并实施了一批机器人应用工程,形成了一批机器人产业化基地,为我国机器人产业的腾飞奠定了基础。 1.2 机器人技术的市场应用 机器人融入我们日常生活的步伐有多快?据国际机器人联盟调查,2004 年,全球个人机器人约有200 万台,到2008 年,还将有700 万台机器人投入运行。按照韩国信息通信部的计划,到2013 年,韩国每个家庭都能拥有一台机器人;而日本机器人协会预测,到2025 年,全球机器人产业的“蛋糕”将达到每年500 亿美元的规模(现在仅有50亿美元)。与20 世纪70 年代PC 行业的情况相仿,我们不可能准确预测出究竟哪些用途将推动这个新兴行业进入临界状态。不过看起来,机器人很可能在护理和陪伴老年人的工作上大展宏图,或许还可以帮助残疾人四处走走,并增强士兵、建筑工人和医护人员的体力与耐力。目前,我国从事机器人研发和应用工程的单位200 多家,拥有量为3500 台左右,其中国产占20%,其余都是从日本、美国、瑞典等40 多个国家引进的。2000 年已生产 各种类型工业机器人和系统300 台套,机器人销售额6.74 亿元,机器人产业对国民经济的年收益额为47 亿元,我国对工业机器人的需求量和品种将逐年大幅度增加。1.3 机器人技术的前景展望机器人是人类的得力助手,能友好相处的可靠朋友,将来我们会看到人和机器人会存在一个空间里边,成为一个互相的助手
《人工智能》教学大纲 一、课程概述 1. 课程研究对象和研究内容 人工智能是计算机与自动化学科的一门分支学科。它研究如何用机器来模仿人脑所从事的推理、证明、识别、理解、学习、规划、诊断等智能活动。人工智能是当前科学技术中正在迅速发展,新思想、新观点、新技术不断涌现的一个学科,也是一门涉及数学、计算机科学、控制论、信息论、心理学、哲学等学科的交叉和边缘学科。 《人工智能》(双语)课程的主要目标是为大学本科高年级学生提供有关人工智能理论以及应用所必需的知识和技能;掌握人工智能的基本原理;掌握设计开发智能系统的基本方法。 2. 课程在整个课程体系中的地位 人工智能原理是计算机科学技术类专业的应用学科。前修课程包括:离散数学、数据结构、算法分析与设计等,后续课程:专家系统,知识工程,该课程可以在大学三、四年级开设。 二、课程目标 1.熟练掌握图搜索策略,熟练掌握回溯策略、图搜索策略的过程以及算法(BACKTRACK 以及A*算法),掌握一些典型问题的启发式函数。 2.掌握用命题逻辑、一阶逻辑表示知识的方法,并在此基础上进行推理,熟练掌握归结方法以及归结反驳过程,熟练掌握利用归结反驳方法进行推理。 3.掌握基于贝叶斯规则的不确定性推理,掌握条件概率、独立、条件独立及贝叶斯公式;掌握利用贝叶斯定理检测垃圾邮件的基本方法。 三、课程内容和要求 这门学科的知识与技能要求分为知道、理解、掌握、学会四个层次。这四个层次的一般涵义表述如下: 知道———是指对这门学科和教学现象的认知。 理解———是指对这门学科涉及到的概念、原理、策略与技术的说明和解释,能提示所涉及到的教学现象演变过程的特征、形成原因以及教学要素之间的相互关系。 掌握———是指运用已理解的教学概念和原理说明、解释、类推同类教学事件和现象。
人工智能教案 Document serial number【LGGKGB-LGG98YT-LGGT8CB-LGUT-
人工智能教案 教学目标: 知识目标:了解人工智能(AI)的定义。知道常见的人工智能应用。 技能目标:能够分析“AI会取代人类吗?”这个问题。 情感目标:能够对AI产生兴趣,理性认识AI。 重难点: 重点:人工智能的定义,了解人工智能的应用。 难点:看待AI威胁论。 教学过程: 导入:你知道AlphaGo吗?(引起同学兴趣) 解释AlphaGo是什么? 同学们观看这幅图片,认识他是谁吗?(柯洁) 我们来读读他的微博:决战前夕,感慨万千... 在这个特殊的时间,我有些话想和热爱围棋、关注围棋、关注我的朋友们说: 无论输赢,这都将是我与人工智能最后的三盘对局 很多人可能会问为什么? 其实私底下我已经与朋友家人说了很多次这样的想法,现在的AI进步之快远超我们的想象。像国产的绝艺、日产的ZEN虽然和AIphago还有着较大差距,但已经表现出超强的实力了...我相信未来是属于人工智能的。
可它始终都是冷冰冰的机器,与人类相比,我感觉不到它对围棋的热情和热爱。对它而言...它的热情——也只不过是运转速度过快导致CPU发热罢了。 我会我用所有的热情去与它做最后的对决,不管面对再强大的对手——我也绝不会后退!至少这...最后一次... 拼尽全力后,无论结果...管他口中是是非非,来一首《沧海一声笑》..岂不美哉、快意?我淡然笑到... 不眠夜,且看且珍惜,请大家欣赏我最后的三盘人机大战。? 我们可以感受到柯洁什么样的心态? 我们可以用一句话来表明:人工智能赢了棋,人类却赢得了未来。 其实这人工智能时代的序幕! 那么什么是人工智能呢?请同学起来回答。 定义:人工智能(Artificial Intelligence),英文缩写为AI。它是研究、开发用于模拟、延伸和扩展人的智能的理论、方法、技术及应用系统的一门新的技术科学。 人工:人力所能及制造的。 智能:涉及到其它诸如意识(CONSCIOUSNESS)、自我(SELF)、思维(MIND)(包括无意识的思维(UNCONSCIOUS_MIND))等等问题。 接下里,我们了解人工智能的发展。(现阶段的人工智能播放视频) 我们现在是什么时代?是互联网时代 未来是属于人工智能的时代!他们有什么区别呢? 区别:互联网只是把原来存在的方式变得更加有效(连接万物)。
《工业机器人》课程教学大纲 课程编号:0803701069 课程名称:工业机器人 英文名称:Industrial Robot 课程类型:专业任选课 总学时:32 讲课学时:24 实验学时:8 学分:2 适用对象:四年制机械设计制造及其自动化专业、四年制机械电子工程专业。 先修课程:高等数学、线性代数、工程制图、机械工程材料、理论力学、材料力学、机械原理、机械设计、电子技术、电工技术、机械制造基础、互换性与技术测 量、液压与气压传动、机电传动控制、单片机原理及应用、自动控制原理等。 一、课程性质、目的和任务 工业机器人课程是机械设计制造及其自动化专业各专业方向的一门主要专业技术课,是一门多学科的综合性技术,它涉及自动控制、计算机、传感器、人工智能、电子技术和机械工程等多学科的内容。其目的是使学生了解工业机器人的基本结构,了解和掌握工业机器人的基本知识,使学生对机器人及其控制系统有一个完整的理解。培养学生在机器人技术方面分析与解决问题的能力,培养学生在机器人技术方面具有一定的动手能力,为毕业后从事专业工作打下必要的机器人技术基础。 二、教学基本要求 本课程以机器人为研究对象,以工业机器人为重点。学完本课程应达到以下基本要求:1.了解机器人的由来与发展、组成与技术参数,掌握机器人分类与应用,对各类机器人有较系统地完整认识。 2.了解机器人运动学、动力学的基本概念,能进行简单机器人的位姿分析和运动分析。 3.了解机器人本体基本结构,包括机身及臂部结构、腕部及手部结构、传动及行走机构等。 4.了解机器人轨迹规划和关节插补的基本概念和特点。 5.了解机器人控制系统的构成、编程语言与编程特点。 6.了解工业机器人工作站及生产线的基本组成和特点。 7.对操纵型机器人、智能机器人有一般的了解。 三、教学内容及要求 绪论 0.1概述 0.1.1机器人的由来与发展 0.1.2机器人的定义 0.1.3机器人技术的研究领域与学科范围 0.2机器人的分类 0.2.1 按机器人的开发内容与应用分类
上海应用技术学院Shanghai Institute of Technology 组长:王文博 组员:严格,熊祚强 指导教师:周文 项目工期:2014年6月10日——2015年6月15日
摘要:本项目研发智能家庭监督机器人是基于智能手机平台之下所应用的, 在借助于ug三维建模设计,机械设计以传动设计,及嵌入式硬件的插入,成功地实现了人远距离分身控制并监督家庭情况,能够随时随地掌握家庭环境的变化,为家庭安全的保障提供了基础,并且解决了目前市场家政机器人价格昂贵的现象。 前言: 随着物联网,智能家居以及智能手机的兴起,针对国内的市场环境, 本项目研发出的一系列四款智能家庭服务机器人,本项目研发的机器人管家是一种远程交互型机器人家政机器人采用低功耗WIFI技术连接互联网及手机终端通过强大智能手机及网络云服务器的数据计算处理能力对机器人进行智能化控制,从而降低了机器人的所需硬件成本,使得家政机器人能被国内消费者所接受。此机器人装配了红外,433射频的家电控制系统,实现了远程家电控制功能,并解决了目前智能家居家电设备接口协议不统一,传统家电难以兼容的问题。此外,机器人本身留有各种传感器接口,通过采用本项目研发的红外热式,温湿度,甲醛以及PM2.5传感器机器人能够实现远程家庭环境监控,家居安防的功能。能够解决目前家庭服务类机器人依赖进口,售价高昂的市场现状。 正文:(建模方面)
如上图所示,主观三视图,以及大致轮廓视图,外观视图上采取了全新的外观设计,底部以正六棱柱作为底座,并且采用抽壳技术,扩大内部空间,方便内部嵌入传动系统,机械设计等等,并且为以后的硬件电子设施提供了空间基础,上部采用圆弧拉伸,同样扩大内部空间,便于齿轮,马达等传动设施插入,放手机的补位,采用加盖模式,内部设有弹簧等设施,加紧设备。具体如下: 一:底轮 底轮采用一般的轮胎设计,圆弧效果便于运动,轮胎表面加拉伸效果,增加抓地,增大摩擦,内部增加五角星设计,省材料, 增加美观 二:转向轮: 由于底面为正六棱柱,两个轮子不能稳定行走,并且转向不方便,故在底面加上两个可以自由旋转的转向轮,转向轮 采用平常滑板上的轮子,这样的轮,自由性比较大,可以随 意转向,而传统的车轮,自由性较低,两者互相结合,既可 以自由转向,又可以稳抓底面。建模设计上主要采用了草图 拉伸方式。 三:滚轴:
智能机器人学习教程 第1章预备知识 1.1虚拟机器人的结构与功能 1.1.1身体结构 在VJC1.5中,有五种型号的机器人:AS-M、AS-MII、AS-UII、AS-InfoX和AS-InfoM。图1-1是虚拟机器人的外形。虚拟机器人的身体结构跟真实的能力风暴智能机器人是相似的。本书中的范例采用的机器人型号均为AS-MⅡ。设置机器人型号的方法参见附录B。 图1-1虚拟机器人外形 1.1.2感觉器官 能力风暴智能机器人的感觉功能,是由机器人的传感器实现的。能力风暴机器人身上安装的传感器有以下几种: 1.红外传感器 红外传感器由红外发射器和红外接收器两部分组成。一旦程序中发出“红外测障”的指令,红外发射器就开始发射红外线。红外线遇到障碍物会反射回来,被红外接收器接收,从而机器人就能判断出障碍物所在的方位。虚拟机器人能够检测左、右、前三个方向的障碍物,跟真实的能力风暴智能机器人基本相同。发射红外线的虚拟机器人如图1-2所示。 图1-2机器人发射红外线示意图 2.光敏传感器
光敏传感器能够检测光线的强度,检测到的值为0~255之间的整数。光线越亮,检测到的数值越小;光线越暗,检测到的数值越大。此项功能跟真实的能力风暴智能机器人是一样的 3.碰撞传感器 虚拟机器人的碰撞传感器能够检测左、右、前、后四个方向的碰撞,型号为AS-InfoX 的机器人只能检测前、左、右三个方向的碰撞。如前所述,虚拟机器人共分五种,它们的的区别主要就体现在碰撞检测功能上。所以读者在打开程序时,无论是例程,还是自己编写保存的程序,如果涉及到“碰撞检测”,必须先设置相应的机器人型号(参见附录B),然后再打开程序、仿真运行。例如:打开例程“自由行走(M).flw”时,由于名称后面带有M,故须先将机器人型号设置为AS-M,然后再打开程序文件、仿真运行。打开例程“自由行走(Info).flw”时,最好先将机器人型号设置为AS-InfoM,然后再打开程序文件、仿真运行。 在碰撞检测功能方面,虚拟机器人跟真实的能力风暴智能机器人有较大差别(参见附录 C、D)。 4.声音传感器 声音传感器能够检测声强大小,检测到的值为0~255之间的整数。数值越小,声音越低;数值越大,声音越响。此项功能跟真实的能力风暴智能机器人是一样的。 5.地面灰度传感器 地面灰度传感器能够检测地面的灰度,检测到的值为0~255之间的整数。地面颜色越深,灰度值越大;地面颜色越浅,灰度值越小。此项功能跟真实的能力风暴智能机器人基本相同。 1.1.3编程语言 能力风暴智能机器人的编程语言是VJC1.5,由机器人C语言(简称JC)和流程图编程语言两部分组成。读者使用仿真版的时候,可以用流程图编程。在用流程图编程的同时,VJC1.5自动生成JC代码,便于读者观察、解释或修改程序,参见图1-3。在图1-3中,左边是流程图,右边是JC代码。在流程图编辑界面中,点击工具栏上的“JC代码”快捷按 钮,即可看到当前程序的JC代码。
智能机器人的设计与制作 引言 近几年机器人已成为高技术领域内具有代表性的战略目标。机器人技术的出现和 进展,不但使传统的工业生产面貌发生全然性变化,而且将对人类社会产生深远的阻碍。随着社会生产技术的飞速进展,机器人的应用领域不断扩展。从自动化生产线到海洋资源的探究,乃至太空作业等领域,机器人可谓是无处不在。目前机器差不多走进人们的生活与工作,机器人差不多在专门多的领域代替着人类的劳动,发挥着越来越重要的作用,人们差不多越来越离不开机器人关心。机器人工程是一门复杂的学科,它集工程力学、机械制造、电子技术、技术科学、自动操纵等为一体。目前对机器人的研究差不多呈现出专业化和系统化,一些信息学、电子学方面的先进技术正越来越多地应用于机器人领域。目前机器人行业的进展与30 年前的电脑行业极为相似。今天在汽车装配线上忙碌的一线机器人,正是当年大型计算机的翻版。而机器人行业的利基产品也同样种类繁多,比如协助大夫进行外科手术的机械臂、在伊拉克和阿富汗战场上负责排除路边炸弹的侦察机器人、以及负责清扫地板的家用机器人,还有许多参照人、狗、恐龙的模样制
造机器人玩具。舞蹈机器人具有人类外观特征、可爱的外貌、又兼有技术含量,极受青青年的喜爱。我从前年开始机器人方面的研究,在这过程中尝试过专门多次的失败,也感受到了无比的乐趣。 图1.1、机器人 1 绪论 机器人技术作为20 世纪人类最伟大的发明之一,自20 世纪60 年代初问世以来, 经历40 余年的进展已取得长足的进步。以后的机器人是一种能够代替人类在非结构化环境下从事危险、复杂劳动的自动化机
器,是集机械学、力学、电子学、生物学、操纵论、计算机、人工智能和系统工程等多学科知识于一身的高新技术综合体。走向成熟的工业机器人,各种用途的特种机器人的多用化,昭示着机器人技术灿烂的改日。 1.1 国内外机器人技术进展的现状 为了使机器人能更好的应用于工业,各工业发达国家的大学、研究机构和大工业企业对机器人系统开发投入了大量的人力财力。在美国和加拿大,各要紧大学都设有机器人研究室,麻省理工学院侧重于制造过程机器人系统的研究,卡耐基—梅隆机器人研究所侧重于挖掘机器人系统的研究,而斯坦福大学则着重于系统应用软件的开发。德国正研究开发“MOVE AND PLAY”机器人系统,使机器人操作就像人们操作录像机、开汽车一样。从六十年代开始日本政府实施一系列扶植政策,使日本机器人产业迅速进展起来,通过短短的十几年。到80 年代中期,已一跃而为“机器人王国”。其机器人的产量和安装的台数在国际上跃居首位。按照日本产业机器人工业会常务理事米本完二的讲法:“日本机器人的进展通过了60 年代的摇篮期。70 年代的有用期。到80 年代进人普及提高期。” 并正式把1980 年定为产业机器人的普及元年”。开始在各个领
课程编号: 课程名称:机器人学 《机器人学》教学大纲 一、课程的地位、性质何任务 本课程是自动化、机械类专业为培养高级工程技术应用型人才而开设的硕士研究生选修课程。面对21世纪知识经济时代的机遇与挑战,人类(地球人)正在以非凡的智慧构思新世纪的蓝图。世界的明天将更加美好。但是,地球人在发展中也面临着环境、人口、资源、战争和贫困等普遍问题,同时还要学会与机器人共处,这是21世纪地球人必须正视和处理的紧要问题,是影响地球人生存和发展的休戚与共的重大事件。 机器人学是一门高度交叉的前沿学科,机器人技术是集力学、机械学、生物学、人类学、计算机科学与工程、控制论与控制工程学、电子工程学、人工智能、社会学等多学科知识之大成,是一项综合性很强的新技术。自第一台电子编程工业机器人问世以来,机器人学已取得令人瞩目的成就。正如宋健教授1999年7月5日在国际自动控制联合会第14届大会报告中所指出的:“机器人学的进步和应用是本世纪自动控制最有说服力的成就,是当代最高意义上的自动化。”机器人技术的出现与发展,不但使传统的工业生产面貌发生根本性的变化,而且将对人类的社会生活产生深远的影响。 通过本课程的学习,培养学生的思维能力和严谨的求学态度,本课程的主要任务是:通过本课程的学习,使学生达到以下基本要求: (1)了解机器人的特点、结构与分类。了解机器人学的研究领域及其与人工智能的关系。 (2)掌握机器人运动方程的表示及运动方程的求解。 (3)掌握机器人动力学方程。 (4)了解机器人的基本控制原则,初步掌握机器人的位置控制和柔顺控制以及机器人的分解运动控制。 (5)了解机器人规划的作用和任务,初步认识机器人的轨迹规划问题。 (6)了解机器人编程的要求和分类、机器人语言系统的结构和基本功能。
比尔·盖茨曾预言“机器人即将重复个人电脑崛起的道路。点燃机器人普及的"导火索",这场革命必将与个人电脑一样,彻底改变这个时代的生活方式。”目前,各省、市的许多学校都开展了机器人活动,但这些学校机器人活动都以校内科技活动小组的方式出现,并没有真正进入课堂教学。特别是农村学校,对于机器人的教学还是一片空白。在信息技术高度发展的今天,智能机器人事业已呈跨越式发展。发展机器人事业,将智能机器人的教学纳入课程教学是最佳形式。那么,在中小学如何把智能机器人纳入课堂教学呢?笔者作了一些探索。 一、将机器人教学纳入课程是必然趋势 上世纪90年代,号称“现代机器人故乡”的美国,机器人教育不再局限在大学的专业学科教育。美国政府还在全国高中生中推行“感知和认知移动机器人”计划,高中生可免费获得70公斤重的一套零件。把机器人教育列入基础教育课程,让学生系统地、有步骤地学习机器人技术。在“世界机器人王国”的日本,除了每所大学都有高水平的机器人研究和教学内容,每年定期举行各种不同层次的机器人设计和制作大赛外,日本机器人教育更是从娃娃抓起。而我国机器人教育起步较迟,1986年我国“863”高科技发展计划才正式启动“智能机器人”主题。到了“九五”期间,“普及机器人文化”被列为该主题第一专题的宗旨之一。1998年中国科技大学在国内率先进行了机器人足球的教学实验。近年来,国内高校机器人比赛逐渐增多,“863”计划为“机器人竞赛工作委员会”提供了专项基金,智能机器人比赛正在发展成为我国创新教育的战略性手段。“中国青少年电脑机器人竞赛活动”、“全国中小学电脑制作活动”、“全国青少年科技创新大赛”、“Intel工程大赛”、“全国中小学生信息技术创新与实践活动”等全国重要赛事也都把机器人列入竞赛项目。除了政府部门的项目外,由学术机构、公司厂商联合主办的智能机器人大赛对推进我国机器人教育活动、普及机器人文化也产生了非常积极的作用。近年来,智能机器人活动在我国引起了中小学教育工作者的关注,并进行了有益的尝试。如,2000年北京景山学校将智能机器人的普及教育以科研课题的方式纳入信息技术课程,在国内率先开展了中小学智能机器人课程教学。2002 年以后,随着我国教育信息化的发展,智能机器人技术向教育领域的渗透已呈加速发展趋势。可以说,智能机器人教育进入课堂教学时机已经成熟。 二、机器人课堂教学可以培养学生多种能力 机器人教育集趣味性、实践性、综合性、科学性、探究性为一体,深受广大青少年学生的喜爱,它集计算机、声、光、电等多种技术,可以让学生全面接触传感器、计算机软硬件、人工智能、自动控制、电子技术和机械工程等多个学科高新科技知识。智能机器人教学进入课堂可培养青少年学生综合素质。 1、培养学生的综合素质和应变能力。一个完整、能够完成任务的机器人,往往要用光、声、电、机械等各种器件,机器人因涉及多门类、多学科的知识和原理,通过教学可以拓展学生各学科的专业知识,又可将各学科的知识横向联系起来,对各学科所学知识起到巩固作用。首先,机器人教学实践活动中,学生按照图形要求或设想将几十种、甚至上百种各种零配件搭建成一个完整的能执行任务的机器人,每一个搭建步骤都必须自己或小组协同完成,这大大提高了学生应用各种工具的技巧和灵活的动手能力、空间想像能力。其次,在搭建前要构思巧妙完成的方式、方法和途径,对可行性要进行分析,得出最佳方案。最后,编写智能机
智能机器人的设计与制作(DOC 26页)
智能机器人的设计与制作 引言 近几年机器人已成为高技术领域内具有代表性的战略目标。机器人技术的出现和 发展,不但使传统的工业生产面貌发生根本性变化,而且将对人类社会产生深远的影响。随着社会生产技术的飞速发展,机器人的应用领域不断扩展。从自动化生产线到海洋资源的探索,乃至太空作业等领域,机器人可谓是无处不在。目前机器已经走进人们的生活与工作,机器人已经在很多的领域代替着人类的劳动,发挥着越来越重要的作用,人们已经越来越离不开机器人帮助。机器人工程是一门复杂的学科,它集工程力学、机械制造、电子技术、技术科学、自动控制等为一体。目前对机器人的研究已经呈现出专业化和系统化,一些信息学、电子学方面的先进技术正越来越多地应用于机器人领域。目前机器人行业的发展与30 年前的电脑行业极为相似。今天在汽车装配线上忙碌的一线机器人,正是当年大型计算机的翻版。而机器人行业的利基产品也同样种类繁多,比如协助医生进行外科手术的机械臂、在伊拉克和阿富汗战场上负责排除路边炸弹的侦察机器人、以及负责清扫地板的家用机器人,还有不少参照人、狗、恐龙的样子制造机器人玩具。舞蹈机器人具有人类外观特征、可爱的外貌、又兼有技术含量,极受青少年的喜爱。我从前年开始机器人方面的研究,在这过程中尝试过很多次的失败,也感受到了无比的乐趣。 图1.1、机器人 1 绪论 机器人技术作为20 世纪人类最伟大的发明之一,自20 世纪60 年代初问世以来, 经历40 余年的发展已取得长足的进步。未来的机器人是一种能够代替人类在非
工人下岗”的局面,因为人们随着社会的发展,实际上把人们从繁重的体力和危险的环境中解放出来,使人们有更好的岗位去工作,去创造更好的精神财富和文化财富,机器人来做这些危险环境的工作,展望21 世纪机器人将是一个与 20 世纪计算机的普及一样,会深入地应用到各个领域,所以很多专家预测,在 21 世纪的前20 年是机器人从制造业走向非制造业的发展一个重要时期,也是智能机器人发展的一个关键时期,目前国际上很多国家,也对机器人对人类社会的影响的估计提出了新的认识,同时,我们也可以看到机器人技术,涉及到多个学科,机械、电工、自动控制、计算机测量、人工智能、传感技术等等,它是一个国家高技术实力的一个重要标准。语音识别处理是语音功能的一个重要方面,目前计算机语音识别处理过程基本上一致,是一种基于统计模式识别的理论。我国的语音识别研究起步于五十年代,近年来发展很快,其研究水平基本与国外同步,在汉语语音识别技术上还有自己的特点和优势。可以预计,语音技术的发展前景无限。 2 机器人设计的内容和要求 2.1 机器人设计的内容 随着现代科技的发展,机器人技术已广泛应用于人类社会生活的各个领域,特别是机器人具有人类外观特征、可爱的外貌、又兼有技术含量,极受青少年的喜爱。本课题要求设计一具有简单人体功能的、模拟舞蹈动作的类人型机器人,完成简单人的基本动作:可以前进后退,左右侧行,左右转弯和前后摆动手臂,行走频率为每秒两步,举手投足、转圈、头部动作灵活、并具备的语音功能。通过语音识别技术,可以对小机器人进行语音控制,通过发出语音命令,控制机器人的。机器人包括底座、头部、上身、下肢、以及电路控制板,分别控制手臂、头部和底盘运动的电机及传动机构等。通过电路控制和机械传动,可使机器人动作。知识范围涉及机构学、力学、电子学、自动控制、计算机、人工智能等。 具体赋予任务: 1、深入了解类人型机器人的功能及工作要求,查找与课题有关的文献资料及参考书目; 2、学习掌握机构创新设计的基本知识和设计方法,了解控制对象舞蹈机器人的工作原理、动作过程,进行简单舞蹈动作及相应机构设计; 3、根据机器人构成、工作原理、主要特点和技术指标,分析比较,加以论证,确定机器人运动控制最终方案,完成硬件电路设计,单片机控制程序设计; 4、制作舞蹈机器人模型,完成各种运动、动作模拟,调试成功。 5、规定的翻译、论文工作。 2.2 舞蹈机器人设计的数据和要求 1、机器人身高80~120 ㎝,表演时机器人随音乐翩翩起舞,动作协调、灵活; 2、表演各种的基本动作,具体动作可自行设计。涵盖行进、转圈、举手投足、头部等动作;