最小势能原理、虚功原理解题示例
最小势能原理:在给定外载荷的作用下,对于稳定平衡系统,在满足位移边界条件的所有各组位移中,实际位移使弹性系统的总势能最小。
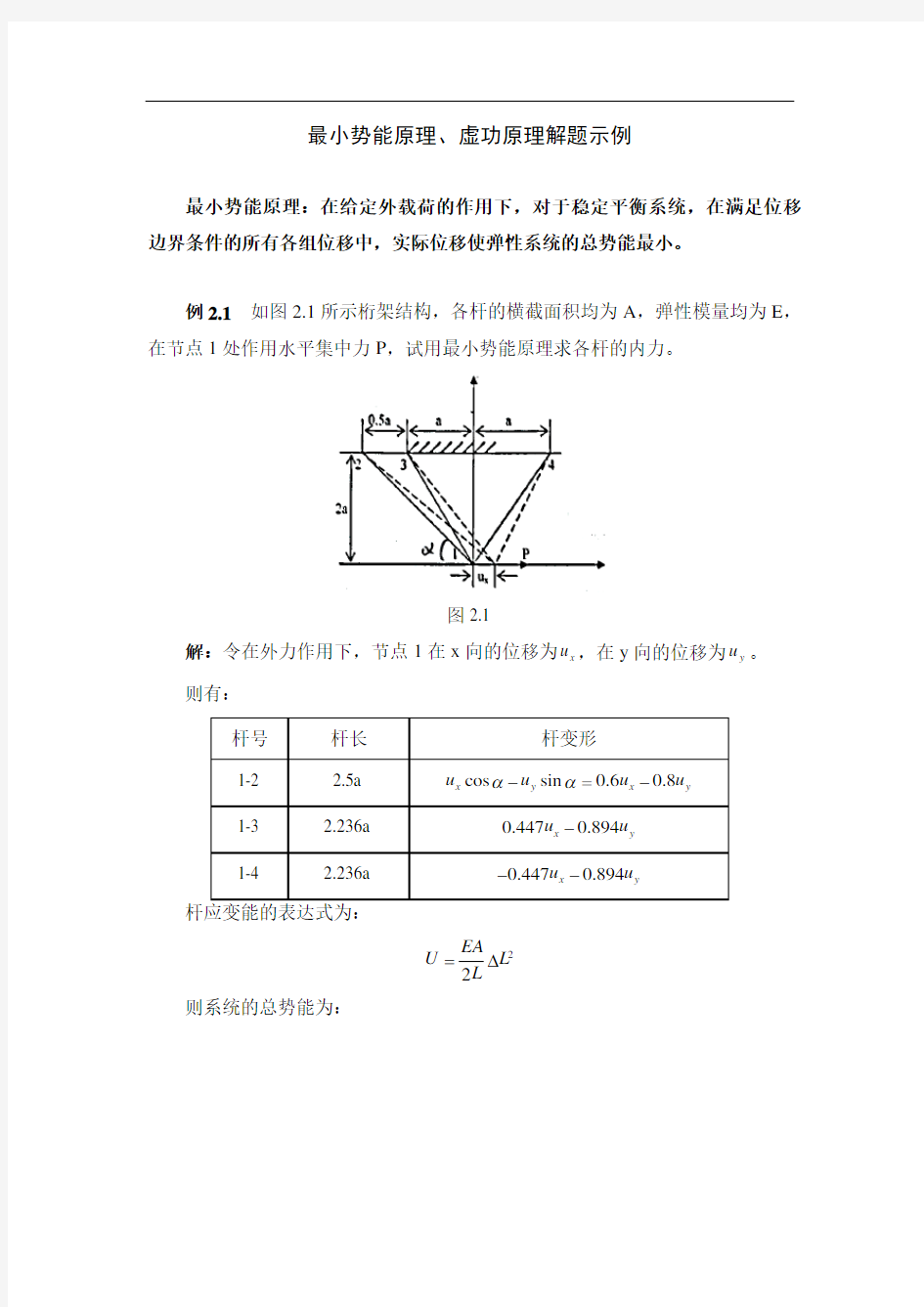
例2.1 如图2.1所示桁架结构,各杆的横截面积均为A ,弹性模量均为E ,在节点1处作用水平集中力P ,试用最小势能原理求各杆的内力。
图2.1
解:令在外力作用下,节点1在x 向的位移为x u ,在y 向的位移为y u 。 则有:
2
2EA U L L
=
? 则系统的总势能为:
()()()()
222220.60.80.4470.8942 2.52 2.2360.4470.8942 2.2360.1610.1920.486i x
x y x y x y x x x y y x
U Pu EA EA
u u u u a a
EA
u u Pu a EA u u u u Pu a
∏=-=
-+-??+---?=-+-∑ 由最小势能原理可知,当结构处于稳定平衡状态时,有:
0;0x y
u u ?∏?∏
==?? 即:
()()0.3230.19200.1920.9720x y x y EA
u u P a
EA
u u a
--=-+=
解得:
3.510.694x y Pa
u EA
Pa u EA =
=
杆的内力可由公式:EA
N L L
=
?求得,故各杆的内力为: 1213140.620.4250.979N P N P N P
---===-
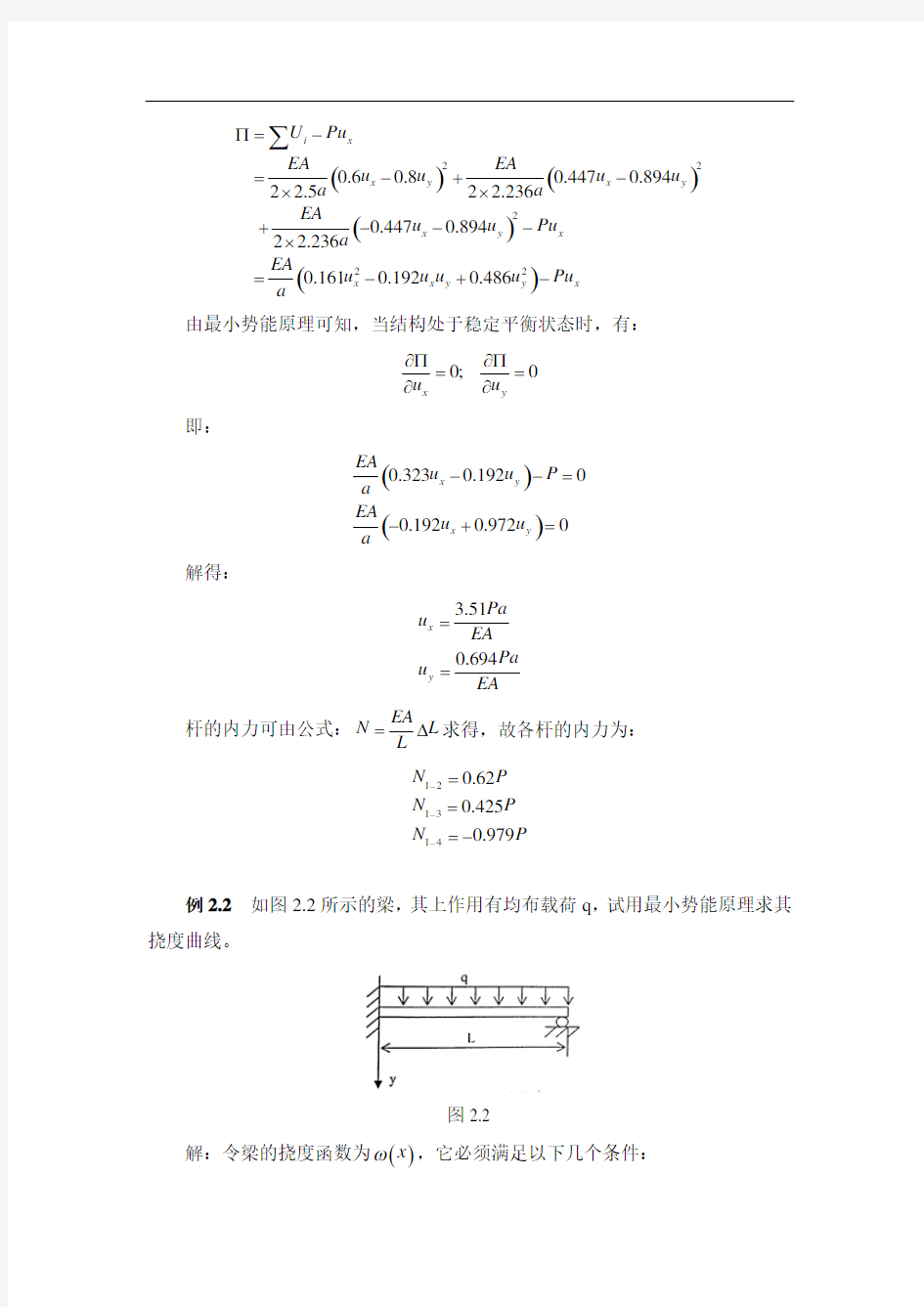
例2.2 如图2.2所示的梁,其上作用有均布载荷q ,试用最小势能原理求其挠度曲线。
图2.2
解:令梁的挠度函数为()x ω,它必须满足以下几个条件:
1、必须满足几何边界条件,但不一定满足平衡条件和力的边界条件;
2、由于有均布载荷q 的作用,故()x ω应为x 的4次多项式。 故,考虑到梁左侧为固支,可设:
()()22012x x a a x a x ω=--
梁右侧需满足:
()|0x L x ω==
且梁右侧没承受弯矩,有:
()
220x L
d x dx ω==(力的边界条件)
代入边界条件,有:
()342
120.60.4x x L a L x L L ω??=-+ ??
?
等截面梁的弯曲应变能表达式为:2
220
1
2L
z d U EJ dx dx ω??= ???
?
【根据平面假设,梁在受弯曲变形后,其横截面仍保持为平面,它一方面有挠度()x ω,一方面横截面在梁变形过程中旋转了一个角度
d dx
ω
,由于该转角的存在,使得距离中性轴为y 处的x 方向的位移为d u y dx ω
=-,应变22x d y dx ωε=-,
弯曲应力为22x d yE dx ω
σ=-,因此,等截面梁的弯曲应变能为:
2
2
222
2
220011112222L
L x x x z V V
A
d d U dV E dV E dx y dA EJ dx dx dx ωωσεε????==== ? ???????????????】 则系统的总势能为:
()()()2
220
012L
L d x EJ dx q x x dx dx ωω??????∏=-??????????
?
? 由最小势能原理可知,当结构处于稳定平衡状态时,有:
0δ∏=
又:
()()()()()()()()222
20044
0034342211122009.60.60.40.60.40
L
L
L L L L d x d EJ x dx q x x dx dx dx d x EJ x dx q x x dx dx a x x x x EJ L x a dx qL x a dx L L L L L ωδδωδωωδωδωδδ??∏=-????
=-????=-+--+ ? ????
?=?????? 【()231231.2 1.6x x x L x a L L δωδ??
=-+ ???】
由于变分可取任意值,故有:
119.69.6qL
EJa qL
a EJ
=?
=
所以:
()2342
20.60.49.6qL x x x x EJ L L ω??=-+ ???
虚功原理:当弹性体在外载荷作用下处于平衡状态时,对任意为约束所容许的虚位移,外力虚功等于内力虚功。虚功原理又称为虚位移原理。
例2.3 试用虚功原理求如图2.3所示梁的位移。
P
图2.3
解:令在外载荷P 作用下,梁的转角为α,则各杆的变形为:
12323L L L L L L α
αα?=?=?=
给梁施加一个虚位移:δα 则外力虚功为:
7
2
W PL δδα=
虚应变能为:
()()
()123231223314EA EA EA U L L L L L L L L L
EAL EAL δδαδαδααδααδα
=
?+?+?=+?+?= 由虚功原理,有:W U δδ=,即:
7
142
4P PL EAL EA
δααδαα=?
=
故梁的位移为:
4Px
d x EA
α==
图2.4
【虚功原理的其它例题可参见理论力学(静力学)第四章第7节】
例2.2 若用虚功原理求解,其步骤如下:
解:令梁的挠度函数为()x ω,它必须满足以下几个条件:
1、必须满足几何边界条件,但不一定满足平衡条件和力的边界条件;
2、由于有均布载荷q 的作用,故()x ω应为x 的4次多项式。 故,考虑到梁左侧为固支,可设:
()()22012x x a a x a x ω=--
梁右侧需满足:
()|0x L x ω==
且梁右侧没承受弯矩,有:
()
220x L
d x dx ω==
代入边界条件,有:
()342
120.60.4x x L a L x L L ω??=-+ ??
?
等截面梁的弯曲应变能表达式为:2
220
1
2L
z d U EJ dx dx ω??= ???
?
给梁施加一个虚位移:()342
120.60.4x x x a L x L L δωδ??=-+ ???
则其外力虚功为:
()()0
L
W q x x dx δδω=?
虚应变能为:
()()22
2
2
L
d x d U EJ x dx dx dx ωδδω??=????
?
由虚功原理,有:W U δδ=,即:
()
()()()44003434
2211122009.60.60.40.60.4L
L L L d x EJ x dx q x x dx
dx a x x x x EJ L x a dx qL x a dx L L L L L ωδωδωδδ=????-+=-+ ? ????????? 由于虚位移是任意的,故:
119.69.6qL
EJa qL
a EJ
=?
=
所以:
()2342
20.60.49.6qL x x x x EJ L L ω??=-+ ???
【由此可以看出,虚位移原理和最小势能原理是一致的,都是从能量的角度来阐述超静定结构在平衡状态所需满足的条件,即用能量方程来替代变形协调条件。在做题时,个人觉得最小势能原理具有更好的操作性。】
2010年 1. 分析结构动力自由度与结构静力自由度是否一致 结构的动力自由度是指确定运动过程中任一时刻全部质量的位置所需的独立几何参数的数目。该定义与静力自由度在数学意义上是一致的,但是物理概念不同:静力自由度只涉及刚体体系的机构运动,排除了各个组成部件的变形运动;动力自由度要考虑体系变形过程中质量的运动自由度。 2. 试简要分析同样跨度的直梁、拱、索受横向荷载时的本质区别 直梁受横向荷载(垂直于轴线方向)时只有弯矩和剪力;由于支座水平推力的作用,拱在竖直向下的荷载作用下产生向内的水平反力;索式结构在竖直向下的荷载作用下,其支座产生向外的水平反力。 2009年 1. 简要说明稳定和稳定自由度的概念 稳定是指结构保持原有平衡形式。稳定自由度:确定结构失稳时所有可能的变形状态所需的独立参数数目。 2. 极限分析的目的是什么?极限分析是否一定要采用塑性铰模型?寻找结构丧失承载能力时的极限状态和确定结构所能承受的荷载极限值并确定极限状态下满足应力边界条件的应力分布规律。不一定,梁和钢架适合采用塑性铰模型,板则需采用塑性铰线模型。 3. 试分析“虚功原理”中“虚功”的物理含义,与采用实功的能量 法相比,“虚功原理”有何优势? “虚功”中的“虚”指位移Δ是任意假定的,与作用于质点上的力无关。发生了虚位移Δ的过程中,力系所作的总功即为“虚功”。实功是对dt所作的功,而虚功是对dx作的功,实功与物体的本身运动状态有关,而虚功只与物体约束条件有关。 4. 支座位移对静定和超静定结构内力和位移有何影响? 对于超静定结构:使支座产生反力,同时产生位移; 对于静定结构:不产生反力,只产生位移。 5. 拱和索的结构特性有何联系和区别 悬索在在荷载等外因下只产生轴向拉力,不产生压力、剪力、不承受弯矩; 拱在竖直向下的荷载作用下,拱的支座产生向内的水平反力。 索式结构在竖直向下的荷载作用下,其支座产生向外的水平反力。 6. 力法、位移法、力矩分配法、矩阵位移法各适用于什么情况 力法:以静定结构为基本体系,将多余约束力作为基本未知量,根据变形条件建立力法方程
第五章思考题 5.1虚功原理中的“虚功”二字作何解释?用虚功原理理解平衡问题,有何优点和缺点? 5.2 为什么在拉格朗日方程中,a θ不包含约束反作用力?又广义坐标与广义力的含义如 何?我们根据什么关系由一个量的量纲定出另一个量的量纲? 5.3广义动量a p 和广义速度a q 是不是只相差一个乘数m ?为什么a p 比a q 更富有意义? 5.4既然a q T ??是广义动量,那么根据动量定理,??? ? ????αq T dt d 是否应等于广义力a θ?为什么在拉格朗日方程()14.3.5式中多出了a q T ??项?你能说出它的物理意义和所代表的物理量吗? 5.5为什么在拉格朗日方程只适用于完整系?如为不完整系,能否由式()13.3.5得出式()14.3.5? 5.6平衡位置附近的小振动的性质,由什么来决定?为什么22s 个常数只有2s 个是独立的? 5.7什么叫简正坐标?怎样去找?它的数目和力学体系的自由度之间有何关系又每一简正坐标将作怎样的运动? 5.8多自由度力学体系如果还有阻尼力,那么它们在平衡位置附近的运动和无阻尼时有何不同?能否列出它们的微分方程? 5.9 dL 和L d 有何区别?a q L ??和a q L ??有何区别? 5.10哈密顿正则方程能适用于不完整系吗?为什么?能适用于非保守系吗?为什么? 5.11哈密顿函数在什么情况下是整数?在什么情况下是总能量?试祥加讨论,有无是总能量而不为常数的情况? 5.12何谓泊松括号与泊松定理?泊松定理在实际上的功用如何? 5.13哈密顿原理是用什么方法运动规律的?为什么变分符号δ可置于积分号内也可移到积分号外?又全变分符号?能否这样? 5.14正则变换的目的及功用何在?又正则变换的关键何在? 5.15哈密顿-雅可比理论的目的何在?试简述次理论解题时所应用的步骤. 5.16正则方程()15.5.5与()10.10.5及()11.10.5之间关系如何?我们能否用一正则变换由前者得出后者? 5.17在研究机械运动的力学中,刘维定理能否发挥作用?何故? 5.18分析力学学完后,请把本章中的方程和原理与牛顿运动定律相比较,并加以评价.
最小势能原理、虚功原理解题示例 最小势能原理:在给定外载荷的作用下,对于稳定平衡系统,在满足位移边界条件的所有各组位移中,实际位移使弹性系统的总势能最小。 例2.1如图2.1所示桁架结构,各杆的横截面积均为A ,弹性模量均为E ,在节点1处作用水平集中力P ,试用最小势能原理求各杆的内力。b5E2RGbCAP 图2.1 解:令在外力作用下,节点1在x 向的位移为x u ,在y 向的位移为 y u 。 则有: 杆应变能的表达式为: 2 2EA U L L = ?
则系统的总势能为: ()()()() 222220.60.80.4470.8942 2.52 2.2360.4470.8942 2.2360.1610.1920.486i x x y x y x y x x x y y x U Pu EA EA u u u u a a EA u u Pu a EA u u u u Pu a ∏=-=-+-??+---?=-+-∑ 由最小势能原理可知,当结构处于稳定平衡状态时,有: 0;0x y u u ?∏?∏ ==?? 即: ()()0.3230.19200.1920.9720x y x y EA u u P a EA u u a --=-+= 解得: 3.510.694x y Pa u EA Pa u EA == 杆的内力可由公式: EA N L L = ?求得,故各杆的内力为: 1213140.620.4250.979N P N P N P ---===- 例2.2如图2.2所示的梁,其上作用有均布载荷q ,试用最小势能原理求其挠度曲线。
图2.2 解:令梁的挠度函数为()x ω,它必须满足以下几个条件: 1、必须满足几何边界条件,但不一定满足平衡条件和力的边界条件; 2、由于有均布载荷q 的作用,故()x ω应为x 的4次多项式。 故,考虑到梁左侧为固支,可设: ()() 22012x x a a x a x ω=-- 梁右侧需满足: ()|0 x L x ω== 且梁右侧没承受弯矩,有: () 220 x L d x dx ω==<力的边界条件) 代入边界条件,有: ()342 120.60.4x x L a L x L L ω??=-+ ? ?? 等截面梁的弯曲应变能表达式为: 2 220 1 2L z d U EJ dx dx ω??= ??? ? 【根据平面假设,梁在受弯曲变形后,其横截面仍保持为平面,它一方面有挠度()x ω,一方面横截面在梁变形过程中旋转了一个角 度d dx ω ,由于该转角的存在,使得距离中性轴为 y 处的x 方向的位移
《弹性力学》试题参考答案(答题时间:100分钟) 一、填空题(每小题4分) 1.最小势能原理等价于弹性力学基本方程中: 平衡微分方程 , 应力边界条件 。 2.一组可能的应力分量应满足: 平衡微分方程 ,相容方程(变形协调条件) 。 3.等截面直杆扭转问题中, M dxdy D =?? 2?的物理意义是 杆端截面上剪应力对转轴的矩等于杆截面内的扭矩 M 。 4.平面问题的应力函数解法中,Airy 应力函数?在边界上值的物理意义为 边界上某一点(基准点)到任一点外力 的矩 。 5.弹性力学平衡微分方程、几何方程的张量表示为: 0,=+i j ij X σ ,)(2 1,,i j j i ij u u +=ε。 二、简述题(每小题6分) 1.试简述力学中的圣维南原理,并说明它在弹性力学分析中的作用。 圣维南原理:如果物体的一小部分边界上的面力变换为分布不同但静力等效的面力(主矢与主矩相同),则近处的应力分布将有显著的改变,但远处的应力所受影响可以忽略不计。 作用:(1)将次要边界上复杂的面力(集中力、集中力偶等)作分布的面力代替。 (2)将次要的位移边界条件转化为应力边界条件处理。 2.图示两楔形体,试分别用直角坐标和极坐标写出其应力函数?的分离变量形式。 题二(2)图 (a )???=++= )(),(),(222θθ??f r r cy bxy ax y x (b )???=+++= )(),(),(3 3223θθ??f r r dy cxy y bx ax y x 3.图示矩形弹性薄板,沿对角线方向作用一对拉力P ,板的几何尺寸如图,材料的弹性模量E 、泊松比 μ 已知。试 求薄板面积的改变量S ?。 题二(3)图
虚功原理(物理竞赛)
§2、虚功原理 上次课主要是介绍了分析力学中经常要用到的一些基本概念,并由虚功的概 念和理想约束的概念导出了解决静力学问题的虚功原理:0=?∑i r i F ρ?δ。虚功 原理适用的范围是:质点组,它适用的前提条件是只受理想约束。这次课就举一些具体例子,使我们能够了解如何利用虚功原理去解决静力学问题。 三、应用虚功原理解题: 例1、如图所示,有一质量为m ,长度为λ的刚性杆子,靠在墙上,在与地 面接触的B 端上受一水平向左的外力F ρ,杆子两 端的接触都是光滑的,当杆子与水平地面成α角 时,要使杆子处于平衡状态,问作用在杆子B 端上的力F ρ有多大?求F ρ=? 解:由题意可知它是一个静力学问题,而且 接触都是光滑的,显然可以应用虚功原理来求解 这个问题。这个例子很简单,简单的题目往往能够清楚地说明物理意义,为了说明虚功原理的意义,如果一开始就举复杂的例子,由于复杂的数字计算将会掩盖物理意义,所以就以这个简单的例子来看看如何应用虚功原理来解出它。第一步当然也是确定研究对象,即①选系统:在这个例题中,我们就取杆子为应用虚功原理的力学系统。②找主动力:作用在我们所选取的系统上的主动力有几个?有 两个。一个是水平作用力F ρ,还有一个是重力m g ρ作用在杆子的质心上。因为杆 子两端A 、B 处的接触是光滑的,∴在该两处的约束力也就不必考虑。③列出虚功方程:主动力找出来以后,视计算方便起见,适当选好坐标,并根据虚功原理列出虚功方程。现在选取如图所示的直角坐标,于是我们现在就可列出系统的虚
功方程。列虚功方程时,正、负号是个很重要的问题,如果按虚位移的实际方向与力的方向间的关系确定虚功的正负号,很容易弄错。为了不容易弄错,我们还是按力的作用点的坐标的正方向与力的方向间的关系来确定虚功的正负号。这种 方法既方便而又不容易搞错。在列方程时必须要注意这个问题。∵F ρ的方向与其 作用点的坐标X 的正方向相反,∴F 取负而δX B 取正,∴此力的虚功为负的,即: 0=--C B y mg x F δδ……①,由于虚功方程中的两个虚位移不是相互独立的,∴我们还需要将它们化成独立变量,然后才能令独立虚位移前的乘数等于零,从而求 出最后的结果。我们从图上很容易得出:αcos l x B =,αsin 2 l C y =。则αδαδsin l x -=,对C y 变分则有:αδαδcos 2 l C y =,将它们代入①式就可得到:0]cos sin [21 =-αδααδαmgl Fl →0)cos sin (21=-δ αααmgl Fl ,∵δα是独立的,可以使它不等于零。∴δα之前的乘数应该等零,故有: 0cos sin 21 =-ααmgl Fl 。于是就可解得题目所要求的结果为:αmgctg F 21=。对 于这个问题,如果按位移的实际方向与力的方向确定虚功正负的话,将会得出这 样的结果,设想杆子在F ρ的作用下向里有一虚位移,∵F ρ的方向与虚位移方向相 同,∴F ρ是作正功的,应该为正的。而重力m g ρ的方向与力的作用点的位移δy C 的方向相反,∴重力的功是负的,于是得到的结果:0=-C B y mg x F δδ是错的。对这个简单例子的求解主要是说明了应用虚功原理的解题步骤。由上面的求解过程可以看出,应用虚功原理解题的步骤一般是:第一步先找出所要考虑的质点组或者刚体,也就是1、找出所要研究的系统。2、找出系统所受的主动力。3、列出虚功方程。列出的虚功方程中的虚位移里的坐标不一定要独立,虚功的正负号很重要,要正确判断。我们还是以所选坐标的正方向为标准,也就是上面解题时所采用的方法。另外还得注意:计算虚功的参考系必须是静止的。4、虚功方程
结构力学-习题集(含答案) 《结构力学》课程习题集 西南科技大学成人、网络教育学院版权所有 习题 【说明】:本课程《结构力学》(编号为06014)共有单选题,判断题,计算题1,计算题2,计算题3,计算题4,几何构造分析等多种试题类型,其中,本习题集中有[计算题4]等试题类型未进入。 一、单选题 1.弯矩图肯定发生突变的截面是()。 A.有集中力作用的截面; B.剪力为零的截面; C.荷载为零的截面; D.有集中力偶作用的截面。 2.图示梁中C截面的弯矩是()。 4m2m 4m A.12kN.m(下拉); B.3kN.m(上拉); C.8kN.m(下拉); D.11kN.m(下拉)。 3.静定结构有变温时,()。 A.无变形,无位移,无内力; B.有变形,有位移,有内力; C.有变形,有位移,无内力; D.无变形,有位移,无内力。 4.图示桁架a杆的内力是()。 A.2P; B.-2P; C.3P; D.-3P。 5.图示桁架,各杆EA为常数,除支座链杆外,零杆数为()。
结构力学-习题集(含答案) A.四根; B.二根; C.一根; D.零根。 P a l = a P P P 6 6. 图示梁A 点的竖向位移为(向下为正)( )。 A.)24/(3EI Pl ; B.)16/(3EI Pl ; C.)96/(53EI Pl ; D.)48/(53EI Pl 。 P EI EI A l/l/22 2 7. 静定结构的内力计算与( )。 A.EI 无关; B.EI 相对值有关; C.EI 绝对值有关; D.E 无关,I 有关。 8. 图示桁架,零杆的数目为:( )。 A.5; B.10; C.15; D.20。 9. 图示结构的零杆数目为( )。 A.5; B.6; C.7; D.8。 10. 图示两结构及其受力状态,它们的内力符合( )。 A.弯矩相同,剪力不同; B.弯矩相同,轴力不同; C.弯矩不同,剪力相同; D.弯矩不同,轴力不同。
达朗贝尔虚位移专项练习tjd 部门: xxx 时间: xxx 整理范文,仅供参考,可下载自行编辑
虚位移、达朗贝尔 专项练习 一.判断题、填空题 1.质点有运动就有惯性力。 < ) 2.已知质点的运动方程就可以确定作用于质点上的力;已知作用于质点上的力也可以确定质点的运动方程。 < )b5E2RGbCAP 3.虚位移是假想的、极微小的位移,它与时间、主动力以及运动的初始条件无关。 < )p1EanqFDPw 4.不论刚体作何种运动,其惯性力系向一点简化的主矢的大小都等于刚体的质量与其质心加速度的乘积,方向则与 质心加速度方向相反。< )DXDiTa9E3d 5.如图所示系统由匀质圆盘与匀质细杆 铰连而成。已知:圆盘半径为r、质量为M, 杆长为l,质量为m。在图示位置,杆的角速 度为ω 、角加速度为α ,圆盘的角速度、角加速度均为零。则系统惯性力系向定轴O简化后,其主矩为。RTCrpUDGiT 二、计算题 图示匀质细杆的端点A、B在固定圆环中沿壁 运动。已知:杆长为L、重为P,质心C的速度大
小为υC<常数),圆环半径为r。试求惯性力系向圆心O简化的结果。5PCzVD7HxA 三计算题 在如图所示机构中,各构件自重不 计,已知OC = CA,P = 200 N, 弹簧的弹性系数k = 10 N/cm,图示 平衡位置时? = 30°,θ = 60°, 弹簧已有伸长δ = 2 cm,OA水平。试用虚位移原理求机构平衡时力F的大小。jLBHrnAILg 四、计算题 五、计算题动静法+虚位移求解
六、计算题 七、计算题 八、计算题动静法求解
§2、虚功原理 上次课主要是介绍了分析力学中经常要用到的一些基本概念,并由虚功的概 念和理想约束的概念导出了解决静力学问题的虚功原理:0=?∑i r i F δ。虚功 原理适用的范围是:质点组,它适用的前提条件是只受理想约束。这次课就举一些具体例子,使我们能够了解如何利用虚功原理去解决静力学问题。 三、应用虚功原理解题: 例1、如图所示,有一质量为m ,长度为 的刚性杆子,靠在墙上,在与地面 接触的B 端上受一水平向左的外力F ,杆子两端的 接触都是光滑的,当杆子与水平地面成α角时,要 使杆子处于平衡状态,问作用在杆子B 端上的力F 有多大?求F =? 解:由题意可知它是一个静力学问题,而且接触都是光滑的,显然可以应用虚功原理来求解这个问题。这个例子很简单,简单的题目往往能够清楚 地说明物理意义,为了说明虚功原理的意义,如果一开始就举复杂的例子,由于复杂的数字计算将会掩盖物理意义,所以就以这个简单的例子来看看如何应用虚功原理来解出它。第一步当然也是确定研究对象,即①选系统:在这个例题中,我们就取杆子为应用虚功原理的力学系统。②找主动力:作用在我们所选取的系 统上的主动力有几个?有两个。一个是水平作用力F ,还有一个是重力m g 作用在杆子的质心上。因为杆子两端A 、B 处的接触是光滑的,∴在该两处的约束力也就不必考虑。③列出虚功方程:主动力找出来以后,视计算方便起见,适当选好坐标,并根据虚功原理列出虚功方程。现在选取如图所示的直角坐标,于是我们现在就可列出系统的虚功方程。列虚功方程时,正、负号是个很重要的问题,如果按虚位移的实际方向与力的方向间的关系确定虚功的正负号,很容易弄错。为了不容易弄错,我们还是按力的作用点的坐标的正方向与力的方向间的关系来确定虚功的正负号。这种方法既方便而又不容易搞错。在列方程时必须要注意这个问 题。∵F 的方向与其作用点的坐标X 的正方向相反,∴F 取负而δX B
[0729]《结构力学》 1、桁架计算的结点法所选分离体包含几个结点 A. 单个 2、固定铰支座有几个约束反力分量 B. 2个 3、从一个无多余约束的几何不变体系上去除二元体后得到的新体系是 A. 无多余约束的几何不变体系 4、两刚片用三根延长线交于一点的链杆相连组成 A. 瞬变体系 5、定向滑动支座有几个约束反力分量 B. 2个 6、结构的刚度是指 C. 结构抵抗变形的能力 7、桁架计算的截面法所选分离体包含几个结点 B. 最少两个 8、对结构进行强度计算的目的,是为了保证结构 A. 既经济又安全 9、可动铰支座有几个约束反力分量 A. 1个 10、固定支座(固定端)有几个约束反力分量 C. 3个 11、改变荷载值的大小,三铰拱的合理拱轴线不变。 A.√ 12、多余约束是体系中不需要的约束。 B.× 13、复铰是连接三个或三个以上刚片的铰 A.√ 14、结构发生了变形必然会引起位移,结构有位移必然有变形发生。 B.×
15、如果梁的截面刚度是截面位置的函数,则它的位移不能用图乘法计算。 A.√ 16、一根连杆相当于一个约束。 A.√ 17、单铰是联接两个刚片的铰。 A.√ 18、连接四个刚片的复铰相当于四个约束。 B.× 19、虚功原理中的力状态和位移状态都是虚设的。 B.× 20、带拉杆三铰拱中拉杆的拉力等于无拉杆三铰拱的水平推力。 A.√ 21、瞬变体系在很小的荷载作用下会产生很大的内力,所以不能作为结构使用。 A.√ 22、一个无铰封闭框有三个多余约束。 A.√ 23、三铰拱的水平推力不仅与三铰的位置有关,还与拱轴线的形状有关。 B.× 24、三铰拱的主要受力特点是:在竖向荷载作用下产生水平反力。 A.√ 25、两根链杆的约束作用相当于一个单铰。 B.× 26、不能用图乘法求三铰拱的位移。 A.√ 27、零杆不受力,所以它是桁架中不需要的杆,可以撤除。 B.× 28、用图乘法可以求等刚度直杆体系的位移。 A.√ 29、连接四个刚片的复铰相当于四个约束。
最小势能原理、虚功原理解题示例 最小势能原理:在给定外载荷的作用下,对于稳定平衡系统,在满足位移边界条件的所有各组位移中,实际位移使弹性系统的总势能最小。 例2.1 如图2.1所示桁架结构,各杆的横截面积均为A ,弹性模量均为E ,在节点1处作用水平集中力P ,试用最小势能原理求各杆的内力。 图2.1 解:令在外力作用下,节点1在x 向的位移为x u ,在y 向的位移为y u 。 则有: 2 2EA U L L = ? 则系统的总势能为:
()()()() 222220.60.80.4470.8942 2.52 2.2360.4470.8942 2.2360.1610.1920.486i x x y x y x y x x x y y x U Pu EA EA u u u u a a EA u u Pu a EA u u u u Pu a ∏=-= -+-??+---?=-+-∑ 由最小势能原理可知,当结构处于稳定平衡状态时,有: 0;0x y u u ?∏?∏ ==?? 即: ()()0.3230.19200.1920.9720x y x y EA u u P a EA u u a --=-+= 解得: 3.510.694x y Pa u EA Pa u EA = = 杆的内力可由公式:EA N L L = ?求得,故各杆的内力为: 1213140.620.4250.979N P N P N P ---===- 例2.2 如图2.2所示的梁,其上作用有均布载荷q ,试用最小势能原理求其挠度曲线。 图2.2 解:令梁的挠度函数为()x ω,它必须满足以下几个条件:
第十四章 虚位移原理 答 案 14-1 (1)若认为B处虚位移正确,则A,C处虚位移有错:A处位移应垂直于 O1A向左上方,C处虚位移应垂直向下。若认为C处虚位移正确,则B,A处虚位移有错:B处虚位移应反向,A处虚位移应垂直于O1A向右下方。C处虚位移可沿力的作用线,A处虚位移不能沿力的作用线。 (2)三处虚位移均有错,此种情况下虚位移均不能沿力的作用线。杆 AB,DE若运动应作定轴转动,B,D点的虚位移应垂直于杆AB,DE;杆BC,DE作平面运动,应按刚体平面运动的方法确定点C虚位移。 14-2 (1)可用几何法,虚速度法与坐标(解析)法;对此例几何法与虚速度法比坐标(解析)法简单,几何法与虚速度法难易程度相同。 (2)可用几何法,虚速度法与坐标(解析)法。几何法与虚速度法相似,比较简单。用坐标法也不难,但要注意δθ的正负号。
(3)同(2) (4)用几何法或虚速度法比较简单,可以用坐标法,但比较难。 (5)同(4) 14-3 (1)不需要。 (2)需要。内力投影,取矩之和为零,但内力作功之和可以不为零。 14-4 弹性力作功可用坐标法计算,也可用弹性力作功公式略去高阶小量计算;摩擦力在此虚位移中作正功。 14-5 在平面力系所在的刚体平面内建立一任意的平面直角坐标系,在此刚体平面内任选一点作为基点,写出此平面图形的运动方程。设任一力 的作用点为(x i, y i),且把此坐标以平面图形运动方程表示,设此点产生虚位移,把力 投影到坐标轴上,且写出此点直角坐标的变分,用解析法形式的虚位移表达式,把力的投影与直角坐标变分代入,运算整理之后便可得。
也可以在平面力系所在的刚体平面内任选一点O(简化中心),把平面力系向此点简化得一主矢与主矩,把主矢以 表示,分别给刚体以虚位移 ,由虚位移原理也可得平衡方程。
第五章思考题 5.1虚功原理中的“虚功”二字作何解释?用虚功原理理解平衡问题,有何优点和缺点? 5.2 为什么在拉格朗日方程中,a θ不包含约束反作用力?又广义坐标与广义力的含义如何?我们根据什么关系由一个量的量纲定出另一个量的量纲? 5.3广义动量a p 和广义速度a q &是不是只相差一个乘数m ?为什么a p 比a q &更富有意义? 5.4既然 a q T &??是广义动量,那么根据动量定理,???? ????αq T dt d &是否应等于广义力a θ?为什么 在拉格朗日方程()14.3.5式中多出了a q T ??项?你能说出它的物理意义和所代表的物理量吗? 5.5为什么在拉格朗日方程只适用于完整系?如为不完整系,能否由式()13.3.5得出式 ()14.3.5? 5.6平衡位置附近的小振动的性质,由什么来决定?为什么22s 个常数只有2s 个是独立的? 5.7什么叫简正坐标?怎样去找?它的数目和力学体系的自由度之间有何关系又每一简正坐标将作怎样的运动? 5.8多自由度力学体系如果还有阻尼力,那么它们在平衡位置附近的运动和无阻尼时有何不同?能否列出它们的微分方程? 5.9 dL 和L d 有何区别? a q L ??和a q L ??有何区别? 5.10哈密顿正则方程能适用于不完整系吗?为什么?能适用于非保守系吗?为什么? 5.11哈密顿函数在什么情况下是整数?在什么情况下是总能量?试祥加讨论,有无是总能量而不为常数的情况? 5.12何谓泊松括号与泊松定理?泊松定理在实际上的功用如何? 5.13哈密顿原理是用什么方法运动规律的?为什么变分符号δ可置于积分号内也可移到积分号外?又全变分符号?能否这样? 5.14正则变换的目的及功用何在?又正则变换的关键何在? 5.15哈密顿-雅可比理论的目的何在?试简述次理论解题时所应用的步骤. 5.16正则方程()15.5.5与()10.10.5及()11.10.5之间关系如何?我们能否用一正则变换由前者得出后者? 5.17在研究机械运动的力学中,刘维定理能否发挥作用?何故?
浅析《虚位移原理》的一般解题步骤与应注意的问题 姓名:王晟学号:000572 班级:机05 这个学期的《工程力学》的学习中,大家最感到头疼的可能就是虚位移原理的一些题目了。虚虚实实,有速度,还有加速度;分析起来特别麻烦,一不小心就容易弄错几个虚位移或弄丢几个虚位移。考试的时候很容易丢分。根据平时上课以及从教科书参考书上积累的知识,我将虚位移原理的有关知识总结一下,希望能够为大家提供一些不成熟的建议。 解题的一般步骤 (1) 根据题意,分清所分析的问题时属于哪一类的问题: ①求平衡问题; ②求约束反力或内力; ③判断平衡的稳定性。 对于求约束反力或内力的问题,首先应解除约束(求哪个反力或内力,解除与之对应的约束),用对应的反力或内力替代约束对系统的作用,从而将反力或内力“转化”为主动力。 每解除一个约束,系统相应增加一个自由度! (2) 分析约束性质,画主动力的受力图。在所研究的系统中,如有某些约束不是理想约束,应将这些约束的反力按主动力处理。 只画系统的主动力的受力图,这里的主动力应该包括: ①系统以外的物体对它的作用力; ②非理想约束的约束反力; ③因解除约束而“转化”为主动力的约束反力或内力。 (3) 确定系统的自由度,应包括因杰出约束而增加的自由度。选择合适的坐标(或线坐标、或角坐标)做系统的广义坐标。 对完整系统来说,广义坐标的数目等于自由度的数目! (4) 给出系统的虚位移,采用如下方法计算主动力作用点的虚位移与广义坐标虚位移的关系: ①几何法:运用运动学中分析速度的方法(对于定常约束来说,虚位移之间的关系就是速度的关系),进行计算。 ②解析法:先选定一个静坐标系,用广义坐标写出主动力(力矩)作用点的坐标分析表达式,然后,再对广义坐标取变分,进行计算。 (5) 建立虚功方程,计算各主动力在给定虚位移中的虚功,建立虚功方程,确定平衡条件,求出待求的参量。 (6) 写出系统的势能表达式,确定平衡位置,判断在平衡位置上,系统是处于稳定平衡还是非稳定平衡。(此部分看题目需要) 应注意的问题 (1) 应用虚位移原理,一般都是以整个系统为研究对象,不宜选取分离对象,这是不同与其他分析方法的。(采用虚位移原理解绗架问题也未尝不可,但并没有明显的效果。 如《理论力学》教材133页例5-13的第三种方法,就是采用了虚位移原理对分离 对象分析)
理论力学第七章题解 部门: xxx 时间: xxx 整理范文,仅供参考,可下载自行编辑
理论力学题解 第七章思考题 7.1. 建立适当的坐标系,单摆悬挂点A始终在轴上,摆锤为 B,摆长,则摆锤的约束方程为:, ,,。可见, 摆锤受完整、双侧、非稳定约束。是否受理想约束,要视悬挂点的约束情况而定。b5E2RGbCAP 7.2. 轮I、II、III的转角可唯一确定力学系统的位置, 被确定后,轮I及绳的位置被确定,确定后,轮II轮III 的位置随之确定。为系统的广义坐标。系统的自由度为 3。p1EanqFDPw 7.3. 由于约束方程可积,积分为:<为积分常 数),所以该约束属于完整约束。 7.4. 7.5. 7.6. <1)由于已知平板的运动规律,所以圆轮与平板的接触点的虚位移<相对固定平面)=<相对平板)+<平板牵连运动引起 的)中的。又因圆轮作无滑滚动,因此。于是圆轮所受 约束力的虚功之和,圆轮受理想约束。<2)由于平 板运动规律没有预先给定,,,圆轮 受到非理想约束。如果以圆轮和平板作为一个系统,约束力的虚功之和为零,系统受理想约束。DXDiTa9E3d
7.7. 7.8. 7.9. 因<是质点1相对质点2的相 对虚位移)。所以或,都会导致两约束力的虚功之和 为零。 7.10. 7.11. 第七章习题 7.1. 杆的自由度为1,以杆与水平方向的夹角作为广义坐标,根 据虚功原理, 第12章 虚位移原理及其应用 12-1 图示结构由8根无重杆铰接成三个相同的菱形。试求平衡时,主动力F 1与F 2的大小关系。 解:应用解析法,如图(a ),设OD = l θsin 2l y A =;θsin 6l y B = θθδcos 2δl y A =;θθδcos 6δl y B = 应用虚位移原理:0δδ12=?-?A B y F y F 02612=-F F ;213F F = 12-2图示的平面机构中,D 点作用一水平力F 1,求保持机构平衡时主动力F 2之值。已知:AC = BC = EC = DE = FC = DF = l 。 解:应用解析法,如图所示: θcos l y A =;θsin 3l x D = θθδsin δl y A -=;θθδcos 3 δl x D = 应用虚位移原理:0δδ12=?-?-D A x F y F 0cos 3sin 12=-θθF F ;θcot 312F F = 12-3 图示楔形机构处于平衡状态,尖劈角为θ和β,不计楔块自重与摩擦。求竖向力F 1与F 2的大小关系。 解:如图(a ),应用虚位移原理:0δδ2211=?+?r F r F 如图(b ): β θt a n δδt a n δ2 a 1r r r == ;12 δtan tan δr r θ β = 0δtan tan δ1211=? -?r θβF r F ;θ β tan tan 21?=F F 12-4 图示摇杆机构位于水平面上,已知OO 1 = OA 。机构上受到力偶矩M 1和M 2的作用。机构在可 习题12-1图 (a ) 习题12-2解图 习题12-3 (a ) r a (b ) 势能驻值原理和最小势能原理 势能驻值原理和最小势能原理是能量法中的一个重要原理,应用极广,它可导自虚位移原理。 虚位移原理:当弹性体(线性或非线性的)处于平衡状态时,对任意虚位移,外力虚功与内力虚功的总和应等于零,即 0=+内外W W δδ (1) 内W δ始终为负值,应等于负的应变能U δ-,即U W δδ-=内,则 0)(=-+U W δδ外 (2) 或0=-W U δδ (3) 式(2)与式(3)意义不同:式(2)表示内力虚功与外力虚功的和为零,是虚位移原理;式(3)表示虚应变能(虚内力势能)U δ与虚外力势能W δ-之和为零。 虚位移是位移的微小增量,实际是位移的一阶变分,W U δδ,也是一阶变分。因此,式 (3)为 0)(=-=∏W U δδ (4) 式中,W U -=∏为总势能,它是应变能和外力势能之和;∏、U 、W 均可从某一参考状态算起。例如杆的屈曲问题。 式(4)导自虚位移原理,适用于弹性体。其意义是当弹性体系处于平衡状态时,总势能一阶变分为零,或体系总势能为一驻值,这就叫势能驻值原理。 0=∏δ是弹性体系处于平衡状态的充要条件。但平衡是否稳定,还要进一步考察∏的高阶变分。 势能是以位移场为变量的函数,∏是一个泛函,由上节可知 +∏+∏+∏=∏?32! 31!21δδδ 体系平衡时0=∏δ,则 +∏+∏=∏?32! 31!21δδ (5) 对于稳定的平衡,给定任何虚位移,∏?总为正。因为只有干扰力作正功才可能偏离原来平衡位置。因此,在稳定平衡状态,体系的总势能为最小,这就是最小势能原理。因此,由式(5)可知 当02>∏δ时,0>∏?,∏为极小,属稳定平衡; 当02=∏δ时, 0=∏?,属中性平衡; 当02<∏δ时,0<∏?,∏为极大,属不稳定平衡。 综上所述,可以概括求临界荷载的两种方法: ①中性平衡时的荷载即临界荷载,因此在中性平衡状态列出平衡条件0=∏δ(可不必求二阶变分),这是势能驻值原理; 匀质杆AB始终在平面内,A端靠在墙上,B端在一光滑曲面上,如图所示。若无论B在何处杆均受力平衡,求曲面方程。 如图所示,四根相同的长度为l的光滑轻杆由铰链连接成菱形,一轻绳系在两对角线之间,下部挂一重量为P的重物,系统放置于两根等高相距为2a(2a<2l)的杆上,求绳中的张力?(φ角已知) 如图所示,一竖立在竖直平面内的半圆空心管,管内刚好装有2n个光滑小珠子,已知每个珠子重力为W,求第i个珠子与第i+1个珠子的作用力Ni。 如图所示,一个外半径为R1,内半径为R2的圆柱形电容器,竖直地插进相对介电常数为εr 的密度为ρ的电解液中,若将电容器接上电压为U 的电源,求电解液中液面上升的高度 第一题,常规做法用受力分析,建立水平竖直方向平衡方程,暴力解之。(约束力合力沿法向) 能量方法,利用随遇平衡,势能V 恒不变,解得y=f(x)。(具体见高妙) 虚功原理:因为此题为理想约束,主动力为重力,虚位移中主动力做功为0,即 P δyc=0 yc=常量 由几何关系:yc=y+22 2 1x l - 故yc=y+ 22 2 1x l -=常量 因x=0时y=0,故常量=2 1 故y=21??? ?????? ?? ??--2x 11l 第二题,直接虚功原理…… 建立如图所示坐标系,把绳子忽略,于是两个拉力变为主动力T ,另一个主动力为P ,约束为理想约束,则有: x A =lsin ? ?δ? δc o s x l A =………………………………………..① ? δ? ?δ??δ?2 sin sin 2cot cos 2a l y a l y P P +-=-=……………….② 由虚功原理得:-2T P A P y x δδ+=0 将①②代入,得T=P ? ?? ? ?? -???tan cos sin 22l a 第三题 设任意珠子的球心到管的圆心为OO ’长度为R ,前面i 个球为系统质心为C ,设CO 长度为 L 。 由虚功原理:N ()θθθθαd W d L iW d d R cos i sin cos i == 其中α=n 4π 即N α θ cos cos i R iWL = 现在的目的就是求质心的位置函数L 和θ 由对称性已知角度θ= ααi i =22 1 求L 用旋转矢量,如图所示 I 个大小为mR 、方向一次相差角度2α的矢量和的大小应该为imL 有:()()α αααsin sin sin sin 22 imL i i R L i mR ==即 结构力学影响线试题 答案 8影响线 判断题: 1、影响线仅应用在移动荷载作用下的内力计算问题中,而不能应用在恒载作用下的内力计算问题。( )答案:错 2、静定梁任一截面C的剪力影响线在截面C左、右的两线段总是互相平行的。( )答案:错 4、结构各截面弯矩影响线的最大竖标和最小竖标分别相连,即构成该结构的弯矩包络图。( )答案:错 7、内力影响线与内力图的不同之处仅在于内力影响线竖标与内力图竖标的量纲不同。()答案:错 二、填空: 2、用静力法作影响线的基本方法可分为两大步骤:________________;________________。答案:列影响线方程、根据列影响线方程作图 3、影响线的主要用途有(1)________________;(2)________________。答案:确定最不利荷载位值计算内力、反力 5、计算结构位移时可利用____影响线。答案:位移 6、临界荷载是指____________________________。答案:使判别式变号的集中荷载 7、最不利荷载位置是指_________________________。答案:使某指定量值取最大值时的荷载位置 9、静定结构的内力影响线一般由_____线段构成。答案:直 10、移动集中荷载组的某种布置状态使某量Z取极大值时,则该布置状态成为____________。答案:最不利荷载位置 11、作弯矩包络图时要取_______个截面计算该截面弯矩最大(小)值,不需取大量截面计算。答案:有限 12、绝对最大弯矩的是指:____________________。答案:所有最大弯矩中数值最大的弯矩值 13、简支梁的绝对最大弯矩的值一般与跨中截面最大弯矩______,且发生在靠近______截面处。答案:值相差不大、跨中点 三、选择: 1、结构某一内力影响线将____而改变。(A)随实际荷载的变化 (B)不随实际荷载的变化(C)因坐标系的不同选择答案:B 2、用机动法作影响线的方法建立在____基础上。 (A)叠加原理 (B)静力平衡 (C)虚功原理答案:C 3、单位荷载P=1在BC上移动时,弯矩MDE的最大值为____。 (A)1.2Pa(左拉) (B)Pa(右拉) (C)2.8Pa(左拉)答案:A 4、计算绝对最大弯矩的公式中,a为____与____作用线之间的距离。答案:临界荷载、杆上荷载合力 9虚功原理和结构的位移计算 一、判断题: 第五章 思考题 5.1 虚功原理中的“虚功”二字作何解释?用虚功原理解平衡问题,有何优缺点? 答:“虚功”是指作用在质点上的力(包括约束反力),在任意虚位移过程中所做的功。因虚位移是假想的位移,所以虚功也是假想的功。不一定是质点在任何真实运动中力实际所完成的“真实功”。而虚功原理中的“虚功”只包括所有主动力的“虚功”,不包括约束反力的“虚功”,因为根据理想约束的条件: ∑==?n i i i 1 0r R δ, 即作用在一力学体系上的所有约束反力在任意虚位移中所做的虚功之和为零。 用虚功原理解平衡问题时,约束反力自动消去,这是它的优点。但因此就不能直接用它来求约束反力,这是它的缺点。 5.2 为什么在拉格朗日方程中,αQ 不包括约束反作用力?又广义坐标及广义力的含义为何?我们根据什么关系可以由一个量的量纲定出另一个量的量纲? 答:决定力学体系的位置状态的独立参数叫广义坐标。广义坐标不一定是长度,也可以是角度、面积或体积等。与广义坐标对应的广义力定义为: ∑=??? =n i i i q Q 1 α αr F 它可以是力或力矩,也可以是其它物理量。我们根据关系:∑==s q Q W 1 αααδδ,可 由广义坐标的量纲定出广义力αQ 的量纲(功的量纲已知)。 根据广义力的定义,我们可以计算与约束反力相应的广义力: ∑=??? =n i i i R q Q 1 α αr R 但理想约束条件:0)(1 1111=???=???=?∑∑∑∑∑=====ααααααδδδq q q q n i i i s n i s i i n i i r R r R r R i ,由于 αδq 是独立的,所以有:),2,1(01 s q Q n i i i R ==??? =∑=αα αr R 。我们看到,只要 满足理想的约束条件,约束反力对广义力的贡献为零。因此,αQ 中不包含约束反力。 5.3 广义动量αp 和广义速度αq 是不是只相差一个乘数m ?为什么αp 比αq 虚位移原理习题及解答 机构在图示位置平衡,不计各杆自重,求力F 1和F 2的关系 解:设AB 杆的A 点为动点,OC 杆为动系,A 、C 两点的虚位移如图,则:φδδcos A e r r = φδδδcos OA e e C l a r a r r == 由上述各式和虚功方程 012=-C A r F r F δδ 解出: 机构在图示位置平衡,不计各杆自重,求力偶矩M 与F 之间的关系。 解:设OA 杆的虚位移为δφ,则A 、D 、B 各点虚位移如图,图中 δφδa r A = θδθδcos 2cos A B r r = θδθδcos 2sin D B r r = 0=+-D r F M δδφ θ2tan F M = 已知:弹簧原长0.3m ,刚度系数k=5kN/m ,机构在图示位置平衡,不计各杆自重,求力偶矩M 的大小。 解:设CD 杆上D 点为动点,AB 杆为动系,它们 的虚位移如图 θδδtan e r r r = θ δδδθcos 0.3AD e e r r == 由虚功方程 0=-r k r F M δδθ 以及弹簧力 )]cos 3 .06.0(3.0[θ- -=k F k 可解出 θ θθs i n c o s c o s 14503-=M N.m 已知:BC=AB=L ,BE=BD=b ,弹簧刚度为k ,当x=a 时,弹簧拉力为零,该系统在力F 作用下平衡,杆重不计,求平衡时x=? 解:弹簧力如图,其中 ) (a x l b k F F k k -='= 各力作用点横向坐标及其变分为 θ cos )(b l x D -= θδθδs i n )(b l x D --= θ cos )(b l x E += θδθδs i n )(b l x E +-= θcos 2l x C = θδθδs i n 2l x C -= 代入虚功方程 0=∑x F x δ 0=+'-C E K D K x F x F x F δδδ 解得: 2 2 kb Fl a x += 已知:已知均质杆长,杆重皆为P ,滑块C 重P2,滑轨倾角为θ,求平衡时角φ 为多大? φsin 2l x D = δφ φδ.cos 2l x D = φcos 2l y D = δφ φδ.sin 2l y D -= φsin 2l x E = δφ φδ.cos 2l x E = φcos 23 l y E = δφ φδ.sin 23l y E -= 0=C x 0=C x δ φcos 2l y C = δφφδ.sin 2l y C -= 把它们代入虚功方程 0)(=+∑y F x F y x δδ得: 0sin sin cos sin cos 21111=++++C E E D D y P y P x P y P x P θδθδθδθδθδ 解得: θφc o t )(2t a n 211 P P P += 15-15 用虚位移原理求图示桁架中杆3的内力。清华大学理论力学课后习题答案-虚位移原理及其应用习题解(内容参考)
力学近似分析方法之势能原理
虚功原理应用例题
结构力学影响线试题答案知识讲解
理论力学习题(5)
工程力学A 参考习题之虚位移原理习题及解答
相关主题
文本预览