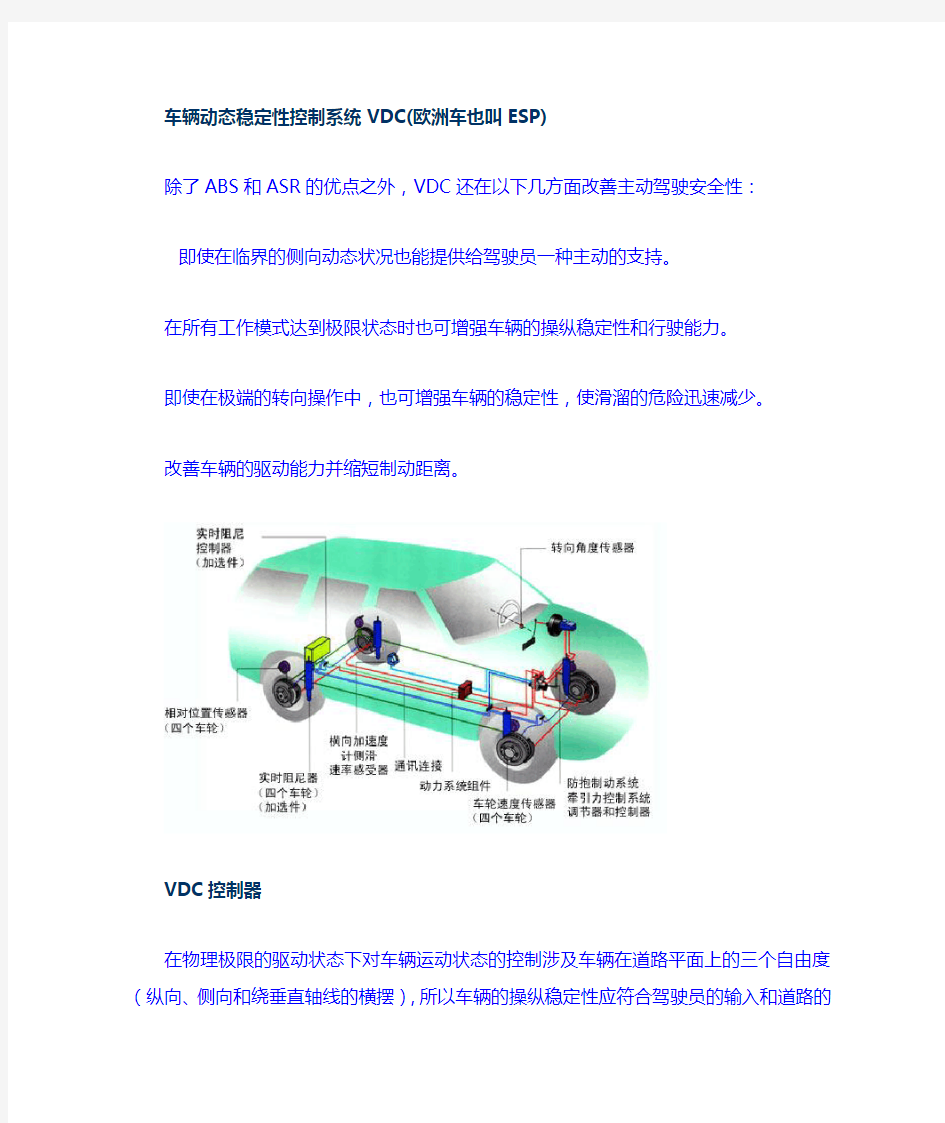
车辆动态稳定性控制系统VDC(欧洲车也叫ESP)
除了ABS和ASR的优点之外,VDC还在以下几方面改善主动驾驶安全性:即使在临界的侧向动态状况也能提供给驾驶员一种主动的支持。
在所有工作模式达到极限状态时也可增强车辆的操纵稳定性和行驶能力。
即使在极端的转向操作中,也可增强车辆的稳定性,使滑溜的危险迅速减少。
改善车辆的驱动能力并缩短制动距离。
VDC控制器
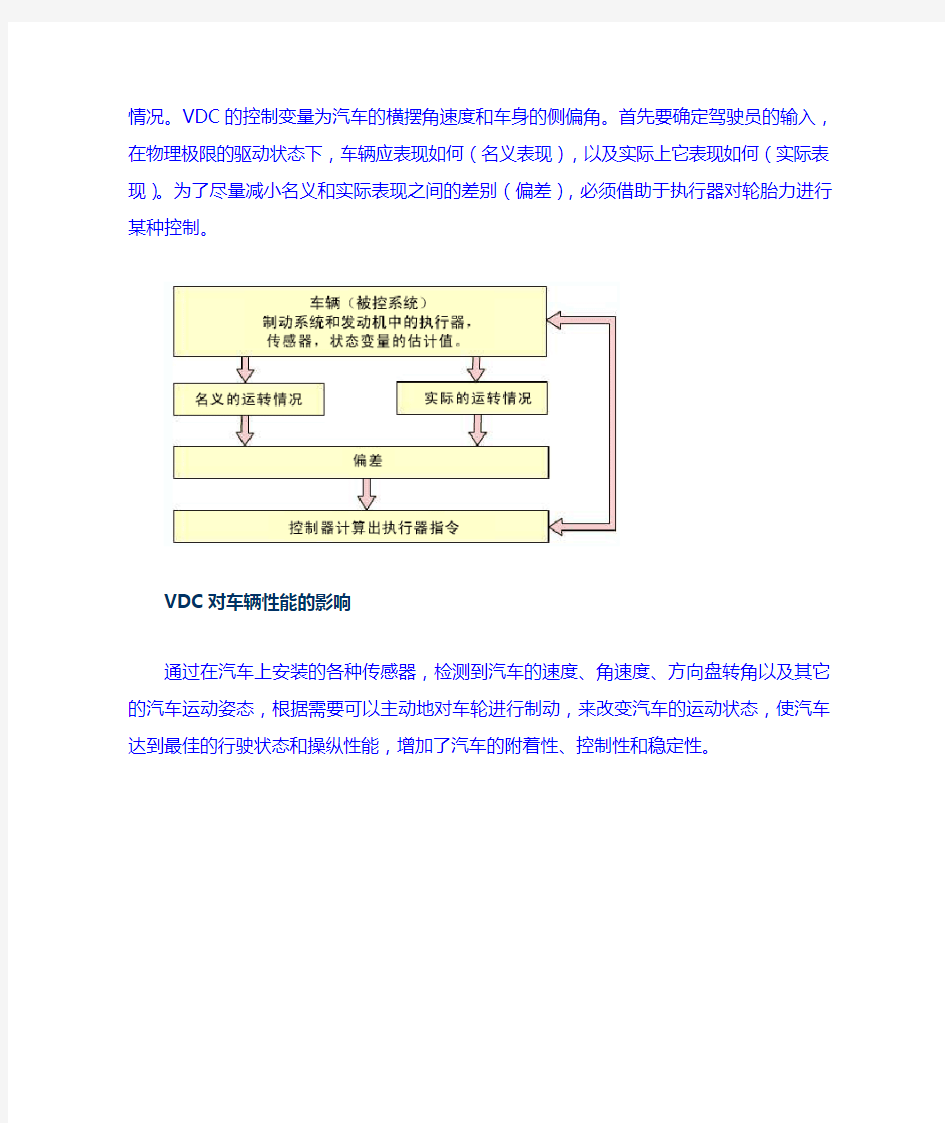
在物理极限的驱动状态下对车辆运动状态的控制涉及车辆在道路平面上的三个自由度(纵向、侧向和绕垂直轴线的横摆),所以车辆的操纵稳定性应符合驾驶员的输入和道路的情况。VDC的控制变量为汽车的横摆角速度和车身的侧偏角。首先要确定驾驶员的输入,在物理极限的驱动状态下,车辆应表现如何(名义表现),以及实际上它表现如何(实际表现)。为了尽量减小名义和实际表现之间的差别(偏差),必须借助于执行器对轮胎力进行某种控制。
VDC对车辆性能的影响
通过在汽车上安装的各种传感器,检测到汽车的速度、角速度、方向盘转角以及其它的汽车运动姿态,根据需要可以主动地对车轮进行制动,来改变汽车的运动状态,使汽车达到最佳的行驶状态和操纵性能,增加了汽车的附着性、控制性和稳定性。
汽车系统动力学的发展和现状 摘要:近年来,随着汽车工业的飞速发展,人们对汽车的舒适性、可靠性以及安全性也提出越来越高的要求,这些要求的实现都与汽车系统动力学相关。汽车系统动力学是研究所有与汽车系统运动有关的学科,它涉及的范围较广,除了影响车辆纵向运动及其子系统的动力学响应,还有车辆在垂向和横向两个方面的动力学内容。本文通过对汽车系统动力学的的介绍,对这一新兴学科的发展和现状做一阐述。 关键字:汽车系统动力学动力学响应发展历史 Summary:In recent years, with the rapid development of automobile industry, people on the vehicle comfort, reliability and safety are also put forward higher requirements, to achieve these requirements are related to vehicle system dynamics.Vehicle system dynamics is the study of all related to the movement of the car system discipline, it involves the scope is broad, in addition to the effects of dynamic response of vehicle longitudinal motion and its subsystems, and vehicles to and dynamic content crosswise two aspects in the vertical.Based on the vehicle system dynamics is introduced, the development and status of this emerging discipline to do elaborate. Keywords:Dynamics of vehicle system dynamics Dynamic response Development history 0 引言 车辆动力学是近代发展起来的一门新兴学科。有关车辆行驶振动分析的理论研究,最早可以追溯到100年前。事实上,知道20世纪20年代,人们对车辆行驶中的振动问题才开始有初步的了解;到20世纪30年代,英国的Lanchester、美国的Olley、法国的Broulhiet开始了车辆独立悬架的研究,并对转向运动学和悬架运动学对车辆性能的影响进行了分析。开始出现有关转向、稳定性、悬架方面的文章。同时,人们对轮胎侧向动力学的重要性也开始有所认识。 在随后的20年中,车辆动力学的进展甚微。进入20世纪50年代,可谓进入了一个车辆操纵动力学发展的“黄金时期”。这期间建立了较为完整的车辆操纵动力学线性域(即侧向加速度约小于0.3g)理论体系。随后有关行驶动力学的进一步发展,是在完善的测量和计算手段出现后才得以实现。人们对车辆动力学理解的进程中,理论和试验两方面因素均发挥了作用。随后的几十年,汽车制造商意识到行驶平顺性和操纵稳定性在汽车产品竞争中的重要作用,因而车辆动力学得以迅速发展。计算机及应用软件的开发,使建模的复杂程度不断提高。在过去的70多年中,车辆动力学在理论和实际应用方面也都取得了很多成就。在新车型的设计开发中,汽车制造商不仅依靠功能强大的计算机软件,更重要的是具有丰富测试经验和高超主观评价技能的工程师队伍。 传统的车辆动力学研究都是针对被动元件的设计而言,而采用主动控制来改变车辆动态性能的理念,则为车辆动力学开辟了一个崭新的研究领域。在车辆系统动力学研究中,采用“人—车—路”大闭环的概念应该是未来的发展趋势。作为驾驶者,人既起着控
车辆稳定性控制系统VSC ---汽车主动安全新技术关键词:车辆动态稳定性控制系统、主动安全、打滑、传感器、转向不足、转向过度。 摘要:车辆动态稳定性控制系统(VSC) 是一种可在各种行驶条件下提高车辆行驶稳定性的新型主动安全体系。它是由是由VSC 控制系统、发动机电控系统、各传感器、制动控制器、油门控制器等单元构成的完整控制体系。系统的大部分元件与ABS、TCS 系统共用, 系统通过各传感器数据的输入对车辆打滑情况进行判断,然后自动介入车辆的操控, 以油门及制动控制器来修正车辆的动态,由此可迅速的将车辆于转弯过程中出现转向过度或转向不足的现象修正到原有正常路径的循迹行驶, 正文: 1 简单介绍 车辆动态稳定性控制系统(VSC) 是一种可在各种行驶条件下提高车辆行驶稳定性的新型主动安全体系。VSC 控制系统增强了制动防抱死系统(ABS)、牵引力控制系统(TCS) 以及发动机扭矩控制系统的功能, 其功能处于比ABS 和TCS 更高的控制层次统计资料显示, 在重大死亡车祸中, 约1 /6是由于车辆失控造成的; 而在车辆失控事件中,由车辆打滑造成的占到了75%。丰田VSC 系
统利用控制单元与制动系统及发动机系统相联, 随时监测车身的 动态状况, 当出现打滑现象时, 系统自动介入油门与制动的操作, 控制发动机的功率输出, 并适时对适当的车轮施加制动, 以利用有附着力的轮胎, 使车辆稳定减速, 修正车辆的动态, 使其稳 定行驶在本来的行驶路线上, 保证车辆安全。丰田公司开发的VSC (Vehicle Stability Control)车辆动态稳定性控制系统, 首见于1997 年推出的Lexus 车系中, 现已普及至Lexus 及 Toyota旗下大部分的车辆: 花冠、锐志、皇冠、佳美、霸道等等。在2007年3月新推出的锐志2.5S特别天窗版中,更是增加了VSC 系统作为其一个卖点。作为ABS、TCS (亦称TRC 驱动防滑转或ASR 加速防滑控制系统) 系统的功能扩展, 车辆动态稳定控制 系统已成为主动安全系统发展的一个重要方向。 VSC 系统在汽车高速转弯将要出现失控时, 可有效地增加汽车的稳定性, 系统通过对从各传感器传来的车辆行驶状态信息进行分析, 向制动防抱 死系统ABS、牵引力控制系统TCS 发出纠偏指令, 帮助车辆维持动态平衡, 减少事故发生。VSC 系统可使车辆在各种状况下保持最佳的稳定性, 在过度转向或不足转向的情形下作用尤为明显。 目前不同厂家对车辆稳定性控制系统的称谓不同, 如宝马公司将 其称为DSC 系统; 保时捷则称其为PSM; 本田公司称为VSA 系统。VSA 及VSC 系统与奔驰公司的VSC 均属同一类系统, 是转 向时对由制动力产生危险的汽车进行动态修正的主动安全装置。
摘要:近年来,伴随着经济社会的快速发展,电力系统规模的不断扩大使得电网体系的结构日趋复杂,电力设备单机容量逐步提高,与之相关的电力系统安全稳定问题也不断涌现。积极研究和运用先进的安全稳定控制技术不但可以使电力系统运行的可靠性大大提高,而且可以直接带来可观的经济效益。从电力系统安全稳定的相关概念入手分析了电力系统安全稳定控制的相关技术,然后就这些技术在电力系统中的实际应用进行了说明,旨在为电力部门提高安全稳定控制水平提供参考。 关键词:电力系统;安全稳定;控制技术;应用 电力作为当今社会最主要的能源,与人民生活和经济建设息息相关。供电系统如果不稳定,往往导致大面积、长时间的停电事故,造成严重的经济损失及社会影响。因此,学习电力系统安全稳定控制理论并研究适应时代发展要求的新的电力系统安全稳定控制技术对于实现当前电力资源的合理配置、提高我国现有电力系统的输电能力和电网的安全稳定运行具有十分重要的意义。 一、电力系统安全稳定控制概述 1.电力系统稳定的相关概念 电力系统的主要任务就是向用户提供不间断的、电压和频率稳定的电能。它的性能指标主要包括安全性、可靠性和稳定性。电力系统可靠性是指符合要求长期运行的概率,它表示长期连续不断地为用户提供充足电力服务的能力。安全性指电力系统承受可能发生的各种扰动而不对用户中断供电的风险程度。稳定性是指经历扰动后电力系统保持完整运行的持续性。 2.电力系统安全稳定控制模式的分类 按照信息采集和传递以及决策方式的不同,电力系统安全稳定控制模式可以分为以下几种:一是就地控制模式。在这种控制模式中,控制装置安装在各个厂站,彼此之间不进行信息交换,只能根据各厂站就地信息进行切换和判断,解决本厂站出现的问题。二是集中控制模式。这种控制模式拥有独立的通信和数据采集系统,在调度中心设置有总控,对系统运行状态进行实时检测,根据系统的运行状态制定相应的控制策略表,发出控制命令并实施对整个系统的安全稳定控制。三是区域控制模式。区域控制型稳定控制系统是针对一个区域的电网安全稳定问题而安装在多个厂站的安全稳定控制装置,能够实现站间运行信息的相互交换和控制命令的传送,并在较大范围实现电力系统的安全稳定控制。 二、电力系统安全稳定控制的关键技术
汽车电子稳定系统(ESP)( 汽车电子稳定系统或动态偏航稳定控制系统(Electronic Stability Program,ESP)是防抱死制动系统ABS、驱动防滑控制系统ASR、电子制动力分配系统EBD、牵引力控制系统TCS 和主动车身横摆控制系统AYC(Active Yaw Control)等基本功能的组合,是一种汽车新型主动安全系统。该系统是德国博世公司(B0SCH)和梅塞德斯-奔驰(MERCEDES-BENZ)公司联合开发的汽车底盘电子控制系统。 在汽车行驶过程中,因外界干扰,比如行人、车辆或环境等突然变化,驾驶员采取一些紧急避让措施,使汽车进入不稳定行驶状态,即出现偏离预定行驶路线或翻转趋势等危险状态。装置ESP的汽车能在极短的几毫秒时间内,识别并判定出这种汽车不稳定的行驶趋势,通过智能化的电子控制方案,让汽车的驱动传动系统和制动系统产生准确响应,及时恰当地消除汽车这些不稳定的行驶趋势,使汽车保持行驶路线和预防翻滚,避免交通事故的发生。 ESP系统是汽车主动安全措施的巨大突破,它通过控制事故发生的可能性来实现安全行车,使汽车在极其恶劣的行车环境中确保行驶的稳定性和安全性。 1.汽车电子稳定系统的组成 ESP在ABS和ASR各种传感器的基础上,增加了汽车转向行驶时横摆率传感器、车身翻转角速度传感器、侧加速度传感器、制动总泵中的液压力传感器和转向盘转角传感器等。其中最重要的是车身翻转角速度传感器,这种车用传感器是航天飞机和空间飞行器上使用的旋转角速度传感器的类似产品。车身翻转角速度传感器就像一个罗盘,适时地监控汽车行驶的准确姿态,监控汽车每个可能的翻转运动角速度。其他传感器则分别监控汽车的行驶速度和各车轮的速度差,监控转向盘的转动角度和汽车的水平侧向加速度,当制动发生时则监控制动力的大小和各车轮制动力的分配情况。 ESP系统包括车距控制、防驾驶员困倦、限速识别、并线警告、停车入位、夜视仪,周围环境识别、综合稳定控制和制动助力(BAS)9项控制功能。通过综合应用9种智能主动安全技术,ESP可将驾驶员对车辆失去控制的危险性降低80%左右。 ESP智能化随车微机控制系统,通过各种传感器,随时监测车辆的行驶状态和驾驶员的驾驶意图,及时向执行机构发出各种指令,以确保汽车在制动、加速、转向等状况下的行驶稳定性。
汽车电子稳定系统(ESP) 汽车电子稳定系统或动态偏航稳定控制系统(Electronic Stability Program,ESP)是防抱死制动系统ABS、驱动防滑控制系统ASR、电子制动力分配系统EBD、牵引力控制系统TCS和主动车身横摆控制系统AYC(Active Yaw Control)等基本功能的组合,是一种汽车新型主动安全系统。该系统是德国博世公司(B0SCH)和梅塞德斯-奔驰(MERCEDES-BENZ)公司联合开发的汽车底盘电子控制系统。 在汽车行驶过程中,因外界干扰,比如行人、车辆或环境等突然变化,驾驶员采取一些紧急避让措施,使汽车进入不稳定行驶状态,即出现偏离预定行驶路线或翻转趋势等危险状态。装置ESP的汽车能在极短的几毫秒时间内,识别并判定出这种汽车不稳定的行驶趋势,通过智能化的电子控制方案,让汽车的驱动传动系统和制动系统产生准确响应,及时恰当地消除汽车这些不稳定的行驶趋势,使汽车保持行驶路线和预防翻滚,避免交通事故的发生。 ESP系统是汽车主动安全措施的巨大突破,它通过控制事故发生的可能性来实现安全行车,使汽车在极其恶劣的行车环境中确保行驶的稳定性和安全性。 1.汽车电子稳定系统的组成 ESP在ABS和ASR各种传感器的基础上,增加了汽车转向行驶时横摆率传感器、车身翻转角速度传感器、侧加速度传感器、制动总泵中的液压力传感器和转向盘转角传感器等。其中最重要的是车身翻转角速度传感器,这种车用传感器是航天飞机和空间飞行器上使用的旋转角速度传感器的类似产品。车身翻转角速度传感器就像一个罗盘,适时地监控汽车行驶的准确姿态,监控汽车每个可能的翻转运动角速度。其他传感器则分别监控汽车的行驶速度和各车轮的速度差,监控转向盘的转动角度和汽车的水平侧向加速度,当制动发生时则监控制动力的大小和各车轮制动力的分配情况。 ESP系统包括车距控制、防驾驶员困倦、限速识别、并线警告、停车入位、夜视仪,周围环境识别、综合稳定控制和制动助力(BAS)9项控制功能。通过综合应用9种智能主动安全技术,ESP可将驾驶员对车辆失去控制的危险性降低80%左右。 ESP智能化随车微机控制系统,通过各种传感器,随时监测车辆的行驶状态和驾驶员的驾驶意图,及时向执行机构发出各种指令,以确保汽车在制动、加速、转向等状况下的行驶稳定性。 图1是汽车电子稳定系统ESP的各种传感器及电子稳定系统ECU在轿车上的安装,其ECU 中配置了两台56kB内存的微机。ESP系统利用这两台微机和各种传感器信号不间断地监控车内电子模块、系统的工作状态和汽车的行驶姿势,比如,速度传感器每相隔20ms就会自检一次。ESP系统还通过车内电子模块之间的信号交流通信网络,充分利用防抱死制动系统ABS、制动助力系统BAS和驱动防滑控制系统ASR等的先进功能。紧急情况下,如紧张的驾驶员对制动力施加不够,制动助力系统BAS将自动增大制动力。在ESP系统出现故障不能正常工作时,ABS和ASR系统能照样工作,以保证汽车正常行驶和制动。
精品 实验题目控制系统的稳定性分析 一、实验目的 1.观察系统的不稳定现象。 2.研究系统开环增益和时间常数对稳定性的影响。 二、实验仪器 1.EL-AT-II型自动控制系统实验箱一台 2.计算机一台 三、系统模拟电路图 系统模拟电路图如图3-1 图3-1 系统模拟电路图R3=0~500K; C=1μf或C=0.1μf两种情况。 四、实验报告 1.根据所示模拟电路图,求出系统的传递函数表达式。 G(S)= K=R3/100K,T=CuF/10 2.绘制EWB图和Simulink仿真图。
精品 3.根据表中数据绘制响应曲线。 4.计算系统的临界放大系数,确定此时R3的值,并记录响应曲线。 系统响应曲线 实验曲线Matlab (或EWB)仿真 R3=100K = C=1UF 临界 稳定 (理论值 R3= 200K) C=1UF
精品 临界 稳定 (实测值 R3= 220K) C=1UF R3 =100K C= 0.1UF
精品 临界 稳定 (理论 值R3= 1100 K) C=0.1UF 临界稳定 (实测值 R3= 1110K ) C= 0.1UF
精品 实验和仿真结果 1.根据表格中所给数据分别进行实验箱、EWB或Simulink实验,并进行实验曲线对比,分析实验箱的实验曲线与仿真曲线差异的原因。 对比: 实验曲线中R3取实验值时更接近等幅振荡,而MATLAB仿真时R3取理论值更接近等幅振荡。 原因: MATLAB仿真没有误差,而实验时存在误差。 2.通过实验箱测定系统临界稳定增益,并与理论值及其仿真结果进行比较(1)当C=1uf,R3=200K(理论值)时,临界稳态增益K=2, 当C=1uf,R3=220K(实验值)时,临界稳态增益K=2.2,与理论值相近(2)当C=0.1uf,R3=1100K(理论值)时,临界稳态增益K=11 当C=0.1uf,R3=1110K(实验值)时,临界稳态增益K=11.1,与理论值相近 四、实验总结与思考 1.实验中出现的问题及解决办法 问题:系统传递函数曲线出现截止失真。 解决方法:调节R3。 2.本次实验的不足与改进 遇到问题时,没有冷静分析。考虑问题不够全面,只想到是实验箱线路的问题,而只是分模块连接电路。 改进:在实验老师的指导下,我们发现是R3的取值出现了问题,并及时解决,后续问题能够做到举一反三。 3.本次实验的体会 遇到问题时应该冷静下来,全面地分析问题。遇到无法独立解决的问题,要及时请教老师,
3.8 控制系统的稳定性 3.8 控制系统的稳定性 稳定性是控制系统最重要的特性之一。它表示了控制系统承受各种扰动,保持其预定工作状态的能力。不稳定的系统是无用的系统,只有稳定的系统才有可能获得实际应用。我们前几节讨论的控制系统动态特性,稳态特性分析计算方法,都是以系统稳定为前提的。 3.8.1 稳定性的定义 图3.26(a)是一个单摆的例子。在静止状态下,小球处于A位置。若用外力使小球偏离A而到达A’,就产生了位置偏差。考察外力去除后小球的运动,我们会发现,小球从初始偏差位置A',经过若干次摆动后,最终回到A点,恢复到静止状态。图3.26(b)是处于山顶的一个足球。足球在静止状态下处于B位置。如果我们用外力使足球偏离B位置,根据常识我们都知道,足球不可能再自动回到B位置。对于单摆,我们说A位置是小球的稳定位置,而对于足球来说,B则是不稳定的位置。 图 3.26 稳定位置和不稳定位置 (a)稳定位置;(b)不稳定位置 处于某平衡工作点的控制系统在扰动作用下会偏离其平衡状态,产生初始偏差。稳定性是指扰动消失后,控制系统由初始偏差回复到原平衡状态的性能。若能恢复到原平衡状态,我们说系统是稳定的。若偏离平衡状态的偏差越来越大,系统就是不稳定的。 在控制理论中,普遍采用了李雅普诺夫(Liapunov)提出的稳定性定义,内容如下: 设描述系统的状态方程为 (3.131)
式中x(t)为n维状态向量,f(x(t),t)是n维向量,它是各状态变量和时间t的函数。如果系统的某一状态,对所有时间t,都满足 (3.132) 则称为系统的平衡状态。是n维向量。当扰动使系统的平衡状态受到破坏时,系统就会偏离平衡状态,在时,产生初始状态=x。在时,如果对于任一实数,都存在另一实数,使得下列不等式成立 (3.133) (3.134) 则称系统的平衡状态为稳定的。 式中称为欧几里德范数,定义为: (3.135) 矢量的范数是n维空间长度概念的一般表示方法。 这个定义说明,在系统状态偏离平衡状态,产生初始状态以后,即以后,系统的状态将会随时间变化。对于给定的无论多么小的的球域S(),总存在另一个的球域,只要初始状态不超出球域,则系统的状态 的运动轨迹在后始终在球域S()内,系统称为稳定系统。 当t无限增长,如果满足: (3.136) 即系统状态最终回到了原来的平衡状态,我们称这样的系统是渐近稳定的。对于任意给定的正数,如果不存在另一个正数,即在球域内的初始状态,在后,的轨迹最终超越了球域S(),我们称这种系统是不稳定的。 图3.27是二阶系统关于李雅普诺夫稳定性定义的几何说明。
汽车稳定控制系统相关知识 电子稳定控制系统概念 汽车电子稳定控制系统是车辆新型的主动安全系统,是汽车防抱死制动系统(ABS)和牵引力控制系统(TCS)功能的进一步扩展,并在此基础上,增加了车辆转向行驶时横摆率传感器、测向加速度传感器和方向盘转角传感器,通过ECU 控制前后、左右车轮的驱动力和制动力,确保车辆行驶的侧向稳定性。 该系统由传感器、电子控制单元(ECU)和执行器三大部分组成,通过电子控制单元监控汽车运行状态,对车辆的发动机及制动系统进行干预控制。典型的汽车电子稳定控制系统在传感器上主要包括4个轮速传感器、方向盘转角传感器、侧向加速度传感器、横摆角速度传感器、制动主缸压力传感器等,执行部分则包括传统制动系统(真空助力器、管路和制动器)、液压调节器等,电子控制单元与发动机管理系统联动,可对发动机动力输出进行干预和调整。 这套系统主要对车辆纵向和横向稳定性进行控制,保证车辆按照驾驶员的意识行驶。电子稳定控制系统的基础是ABS制动防抱死功能,该系统在汽车制动情况下轮胎即将抱死时,一秒内连续制动上百次,有点类似于机械式“点刹”。如此一来,在车辆全力制动时,轮胎依然可以保证滚动,滚动摩擦的效果比抱死后的滑动摩擦效果好,且可以控制车辆行驶方向。
另一方面该系统会与发动机ECU协同工作,当驱动轮打滑时通过对比各个车轮的转速,电子系统判断出驱动轮是否打滑,立刻自动减少节气门进气量,降低发动机转速从而减少动力输出,对打滑的驱动轮进行制动。这样便可以减少打滑并保持轮胎与地面抓地力之间最合适的动力输出,此时无论怎么给油,驱动轮都不会发生打滑现象。 该系统在保证车辆横向稳定性方面体现在当系统通过转角传感器、横向加速度传感器及轮速传感器的信号发现车辆发生了转向不足或过度时,系统会控制单个或是多个车轮进行制动,来调整汽车变换车道或在过弯时的车身姿态,使汽车在变换车道或是过弯时能够更加的平稳而安全。 目前,世界范围内主要供应电子稳定控制系统的供应商有六家,分别是博世、天合、电装、爱信精机、大陆、京西重工(收购了德尔福底盘系统公司),众厂家的系统也基本都是从这几家采购而来,再冠以不同的名字。不过,即使是同一系统在不同车型上的功能也会有不同,这里我们只说最基本的功能。
西南交通大学研究生2009-2010学年第( 2 )学期考试试卷 课程代码 M01206 课程名称 车辆系统动力学 考试时间 120 分钟 阅卷教师签字: 答题时注意:各题注明题号,写在答题纸上(包括填空题) 一. 填空题(每空2分,共40分) 1.Sperling 以 频率与幅值的函数 ,而ISO 以 频率与加速度的函数 评定车辆的平稳性指标。 2.在轮轨间_蠕滑力的_作用下,车辆运行到某一临界速度时会产生失稳的_自激振动_即蛇行运动。 3.车辆运行时,在转向架个别车轮严重减重情况下可能导致车辆 脱轨 ,而车辆一侧全部车轮严重 减重情况下可能导致车辆 倾覆 。 4.在车体的六个自由度中,横向运动是指车体的横移、 侧滚 和 摇头 。 5.在卡尔克线性蠕滑理论中,横向蠕滑力与 横向 蠕滑率和 自旋 蠕滑率呈相关。 6.设具有锥形踏面的轮对的轮重为W ,近似计算轮对重力刚度还需要轮对的 接触角λ 和 名义滚动圆距离之半b 两个参数。 7.转向架轮对与构架之间的 横向定位刚度 和 纵向定位刚度 两个参数对车辆蛇行运动稳定性影 响较大。 8. 纯滚线距圆曲线中心线的距离与车轮 的_曲率_成反比、与曲线的_曲率_成正比。 9.径向转向架克服了一般转向架 抗蛇行运动 和 曲线通过 对转向架参数要求的矛盾。 10.如果两辆同型车以某一相对速度冲击时其最大纵向力为F ,则一辆该型车以相同速度与装有相同缓冲器 的止冲墩冲击时的最大纵向力为_21/2F _,与不装缓冲器的止冲墩冲击时的最大纵向力为_2F_。 院 系 学 号 姓 名 密封装订线 密封装订线 密封装订线
共2页 第1页 5.什么是稳定的极限环? 极限环附近的内部和外部都收敛于该极限环,则称该极限环为稳定的极限环。 6.轨道不平顺有几种?各自对车辆的哪些振动起主要作用? 方向、轨距、高低(垂向)、水平不平顺。方向不平顺引起车辆的侧滚和左右摇摆。轨距不平顺对轮轨磨耗、车辆运行稳定性和安全性有一定影响。高低不平顺引起车辆的垂向振动。水平不平顺则引起车辆的横向滚摆耦合振动。 三.问答题 (每题15分,共30分) 1.已知:轮轨接触点处车轮滚动圆半径r ,踏面曲率半径R w ,轨面曲率半径R t , 法向载荷N ,轮轨材料的弹性模量E 和泊松比o 。试写出Hertz 理论求解接触椭圆 长短半径a 、b 的步骤。P43-P44 根据车轮滚动圆半径、踏面在接触点处的曲率半径、钢轨在接触点处的曲率半径得到A+B 、B-A ,算得cos β,查表得到系数m 、n ,然后分别根据钢轨和车轮的弹性模量E 和泊松比σ,求得接触常数k ,得出轮轨法向力N ,然后带人公式求得a 、b 。 2. 在车辆曲线通过研究中,有方程式 ()W f r y f w O W μψλ212 1 2 222 * 11=??? ?????+???? ?? (1)该式中,等号处分别为 <、= 和 > 情况下,代表车辆的哪三种状态? <代表车辆过曲线时不存在滑动;=代表车辆过曲线时,刚好不存在滑动;>代表车辆出现 二.简答题 (每题5分,共30分) 1.与传统机械动力学相比,轨道车辆动力学有何特点? 2.轮轨接触几何关系的计算有哪两种方法,各有何优缺点? 解析和数值方法。数值方法可以用计算机,算法简单,效率高,但存在一定误差;解析方法是利用轮轨接触几何关系建立解析几何的方式求解,比较准确,但是计算繁琐,方法难于理解。 3.在车辆系统中,“非线性”主要指哪几种关系? 轮轨接触几何非线性、轮轨蠕滑关系非线性、车辆悬挂系统非线性 4.怎样根据特征方程的特征根以判定车辆蛇行运动稳定性?。 根据求出的特征根实部的正负判断车辆蛇行运动的稳定性,当所有的特征根实部均为负时,车辆系统蛇行运动稳定,存在特征根为零或者负时,车辆系统的蛇行运动不稳定。
车辆系统动力学发展1
汽车系统动力学的发展和现状 摘要:近年来,随着汽车工业的飞速发展,人们对汽车的舒适性、可靠性以及安全性也提出越来越高的要求,这些要求的实现都与汽车系统动力学相关。汽车系统动力学是研究所有与汽车系统运动有关的学科,它涉及的范围较广,除了影响车辆纵向运动及其子系统的动力学响应,还有车辆在垂向和横向两个方面的动力学内容。本文通过对汽车系统动力学的的介绍,对这一新兴学科的发展和现状做一阐述。 关键字:汽车系统动力学动力学响应发展历史Summary:In recent years, with the rapid development of automobile industry, people on the vehicle comfort, reliability and safety are also put forward higher requirements, to achieve these requirements are related to vehicle system dynamics.Vehicle system dynamics is the study of all related to the movement of the car system discipline, it involves the scope is broad, in addition to the effects of dynamic response of vehicle longitudinal motion and its subsystems, and vehicles to and dynamic content crosswise two
分布式安全稳定控制装置的应用 (1.国网江芎=省电力公司海安县供电公司,江苏南通226600;2.南京师范大学,江苏南京210000)[摘要]介绍了分布式安全稳定控制装置的基本原理和控制策略,结合实例阐述了具体的系统配置方案与控制策略的设置。结果表明,合理的控制策略可以有效提高安全稳定控制装置的运行可靠性,确保信号采集的正确性,进而保障电网安全、稳定地运行。[关键词]安稳装置;控制策略;通道配置;稳控策略近年来,为了优化能源结构、推动节能减排,实现经济可持续发展,国家大力推广特高压骨干电网以及光伏电源建设,我国的电网结构因此发生了很大变化。因多个区域电网的联系加强,一旦特高压骨干电网发生故障,将波及多个区域电网,增加了电网稳定特性的复杂度。安全稳定控制装置(以下简称“安稳装置”)是能够快速切除系统故障、确保系统稳定运行的装置。电力系统发生短路或异常运行称为电力系统的一次事故,而把可能导致电力系统失步的称为二次事故。为了防止二次事故产生的严重后果,必须装设安稳装置。当电网受到大扰动而出现紧急状态时,安稳装置能够迅速执行紧急控制措施,维持系统功角稳定、电压稳定和频率稳定,使系统恢复到正常运行状态。装设安稳装置是提高电力系统稳定性、防范电网稳定事故、防止大面积停电事故的有效措施,目前已广泛应用在全国各级目网和电厂。1 分布式安稳装置基本原理分布式安稳装置是在多年研制开发安稳装置经验的基础上,为了满足特高压互联电网稳定运行要求而研发的新一代安稳装置。分布式安稳装置既可用于特高压电网的稳定控制和大区互联电网的安全稳定控制,又可适用于区域电网和单个厂站的稳定控制,满足电力系统安全稳定控制的需要,提高对电网的驾驭能力。分布式安稳装置要采集交流电流、交流电压等模拟量信息和开关、刀闸等位置信号以及保护跳闸信号;并且为实现协调控制,还需要采集异地的线路、元件、装置等运行信息,通过采集的信息自动识别电网当前的运行方式。当系统故障时,根据判断出的故障类型(包括远方送来的故障信息)、事故前电网的运行方式及主要送电断面的潮流大小,查找存放在装置内的预先经离线稳定分析制定的控制策略表,确定应采取的控制措施及控制量,如切机、切负荷、解列、直流功率紧急调制、调机组出力、投切电抗器/电容器等。2 安稳装置控制策略以某供电公司辖区内110kV光伏电站并网为例,对安稳装置控制策略进行具体分析研究。各个变电站均采用
汽车电子稳定系统(ESP)的原理分析 汽车电子稳定系统或动态偏航稳定控制系统(Electronic Stability Program,ESP)是防抱死制动系统ABS、驱动防滑控制系统ASR、电子制动力分配系统EBD、牵引力控制系统TCS 和主动车身横摆控制系统AYC(Active Yaw Control)等基本功能的组合,是一种汽车新型主动安全系统。该系统是德国博世公司(B0SCH)和梅塞德斯-奔驰(MERCEDES-BENZ)公司联合开发的汽车底盘电子控制系统。 在汽车行驶过程中,因外界干扰,比如行人、车辆或环境等突然变化, 驾驶员采取一些紧急避让措施,使汽车进入不稳定行驶状态,即出现偏离预定 行驶路线或翻转趋势等危险状态。装置ESP 的汽车能在极短的几毫秒时间内,识别并判定出这种汽车不稳定的行驶趋势,通过智能化的电子控制方案,让汽 车的驱动传动系统和制动系统产生准确响应,及时恰当地消除汽车这些不稳定 的行驶趋势,使汽车保持行驶路线和预防翻滚,避免交通事故的发生。 ESP 系统是汽车主动安全措施的巨大突破,它通过控制事故发生的可能性来实现安全行车,使汽车在极其恶劣的行车环境中确保行驶的稳定性和安全性。 1.汽车电子稳定系统的组成 ESP 在ABS 和ASR 各种传感器的基础上,增加了汽车转向行驶时横摆率传感器、车身翻转角速度传感器、侧加速度传感器、制动总泵中的液压力传 感器和转向盘转角传感器等。其中最重要的是车身翻转角速度传感器,这种车 用传感器是航天飞机和空间飞行器上使用的旋转角速度传感器的类似产品。车 身翻转角速度传感器就像一个罗盘,适时地监控汽车行驶的准确姿态,监控汽 车每个可能的翻转运动角速度。其他传感器则分别监控汽车的行驶速度和各车
SIMPACK车辆动力学习仿真系统 SIMPACK软件是德国INTEC Gmbh公司(于2009年正式更名为SIMPACK AG)开发的针对机械/机电系统运动学/动力学仿真分析的多体动力学分析软件包。它以多体系统计算动力学(Computational Dynamics of Multibody Systems)为基础,包含多个专业模块和专业领域的虚拟样机开发系统软件。SIMPACK软件的主要应用领域包括:汽车工业、铁路、航空/航天、国防工业、船舶、通用机械、发动机、生物运动与仿生等。 SIMPACK是机械系统运动学/动力学仿真分析软件。SIMPACK软件可以分析如:系统振动特性、受力、加速度,描述并预测复杂多体系统的运动学/动力学性能等。 SIMPACK的基本原理就是通过搭建CAD风格的模型(包括铰、力元素等)来建立机械系统的动力学方程,并通过先进的解算器来获取系统的动力学响应。 SIMPACK软件可以用来仿真任何虚拟的机械/机电系统,从仅仅只有几个自由度的简单系统到诸如一个庞大的火车。SIMPACK软件可以应用在我们产品设计、研发或优化的任何阶段。 SIMPACK软件独具有的全代码输出功能可以将我们的模型输出成Fortran或C代码,从而可以实现与任意仿真软件的联合。 车辆动力学仿真carsim CarSim是专门针对车辆动力学的仿真软件,CarSim模型在计算机上运行的速度比实时快3-6倍,可以仿真车辆对驾驶员,路面及空气动力学输入的响应,主要用来预测和仿真汽车整车的操纵稳定性、制动性、平顺性、动力性和经济性,同时被广泛地应用于现代汽车控制系统的开发。CarSim可以方便灵活的定义试验环境和试验过程,详细的定义整车各系统的特性参数和特性文件。 CarSim软件的主要功能如下: 适用于以下车型的建模仿真:轿车、轻型货车、轻型多用途运输车及SUV; 可分析车辆的动力性、燃油经济性、操纵稳定性、制动性及平顺性; 可以通过软件如MATLAB,Excel等进行绘图和分析; 可以图形曲线及三维动画形式观察仿真的结果;包括图形化数据管理界面,车辆模型求解器,绘图工具,三维动画回放工具,功率谱分析模块;程序稳定可靠;
汽车操控稳定性研究 一(车辆车身各部件对车辆操纵稳定性影响的研究 1. 电动助力转向系统对汽车操控稳定性的影响 在电动助力转向系统中引入横摆角速度反馈传感器 ,建立了包含电动助力转向系统的人 -车系统数学模型 ;经模拟仿真分析 ,表明该模型在 EPS中引入横摆角 速度负反馈可以显著改善前轮角阶跃输入下车辆的横摆角速度的瞬态响应 ;并且EPS助力矩响应曲线上升平稳缓慢 ,有利于汽车在低附着系数路面高速转向行驶时的操纵 ,从而提高汽车的行驶安全性。 1.1. 横摆角速度反馈 当汽车的运动进入失稳状态时 ,驾驶员很容易做出过度转向的车辆 ,可在 EPS 中引入一个负反馈 ,以降低系统的助力矩 ,削弱驾驶员快速改变前轮转向角的能力。 1.2. 仿真结果及结论 对于不引入反馈的系统 ,瞬态响应曲线的振荡幅度很大 ,收敛较慢 ,稳定性较差。引入反馈后 ,系统的超调量显著降低 ,并很快的趋于稳态值 ,但反应时间较前者增长。引入反馈后 (实线表示 )系统在横摆角速度出现剧烈振荡的阶段 ( t < 1 s)提供远小于常规系统 (虚线表示 )的助力矩。这样转向系能提供给驾驶员更多的“路感”,同时也使转向系变得较“迟钝”,削弱了驾驶员快速控制前轮转向的能力[ 6 ] ,防止因驾驶员 (错误的 )快速转向操纵而导致的系统不稳定。另外 ,带有反馈的系统提供的助力矩曲线很平滑 ,而不带反馈的系统却出现了一定的波动。抑制助力矩的波动不仅有利于保持车辆的稳定性 ,也有利于延长助力电机的寿命。 因此在 EPS引入横摆角速度反馈可以减少前轮阶跃输入车辆的横摆角速度瞬态响应的时间 ,显著降低超调量 ,可明显改善车辆的行驶稳定性 ,但会增长反应时间。为 EPS引入横摆角速度反馈后 , EPS系统的助力矩上升较慢 ,但增长平稳 ,
汽车电子控制技术汽车类专业应用型本科示范教材 机械工业出版社出版主编于京诺
第3章 汽车行驶稳定性控制系统 ?学习目标 ?·了解ABS、ASR的基础理论。 ?·了解ABS、ASR的组成和分类。 ?·掌握ABS的结构和工作原理。 ?·掌握ASR的结构和工作原理。 ?·了解ESP的功能。 ?·掌握ESP的结构和工作原理。
3.1 防抱死制动系统(ABS 3.1.1 概述 1.ABS 的基础理论 第3章 汽车行驶稳定性控制系统 (1)汽车制动时的附着条件 地面制动力只能小于或等于附着力: (3-1) 附着力正比于地面对车轮的法向反作用力F Z以及车轮与地面之间的附着系数,即 (3-2) 在地面对车轮的法向反作用力F Z一定的情况下,附着力的大小取决于附着系数。附着系数的大小与路面和轮胎的性质有关,还与车轮的滑移率有关。 ?F F X ≤??Z F F =
(3)附着系数与滑移率的关系 车轮与地面之间的附着系数会随着车轮滑移率的变化而变化,干燥硬实路面附着系数与滑移率的关系如图3-1所示。 开始时随着滑移率的增大, 纵向附着系数迅速增大,当滑 移率达到约20%时,纵向附着 系数达到最大值。当滑移率达 到100%,即车轮完全被抱死滑 移时,其附着系数称为滑动附 着系数。当滑移率为0时,横 向附着系数最大,随着滑移率 的增大,横向附着系数逐渐减 小,当滑移率达到100%时,横 向附着系数接近于零。 图3-1 干燥硬实路面附着系数与滑移率的关系
(4)汽车采用ABS的必要性 由附着系数与滑移率之间的关系可知,汽车制动时如果车轮完全抱死,就纵向附着系数而言,其滑动附着系数低于峰值附着系数,这将使车轮完全抱死时的制动距离比具有峰值附着系数时的制动距离变长;就横向附着系数而言,由于在车轮抱死时的横向附着系数接近于零,汽车几乎失去了横向附着能力,因此使汽车的方向稳定性变差,一旦汽车遇到横向干扰力的作用,就可能产生侧滑、甩尾甚至回转等情况。另外,一旦转向车轮抱死,汽车不会按照转向轮偏转的方向行驶,而是沿汽车行驶惯性力的方向向前滑动,从而使汽车失去转向控制能力。 综上所述,汽车制动时车轮抱死会使制动距离变长,方向稳定性变差,失去转向控制能力,因此制动时应避免车轮抱死。汽车上采用ABS的目的就是避免制动时车轮抱死,将滑移率控制在10%~30%,在此范围内既有最大的纵向附着系数,使制动距离最短,又有较大的横向附着系数,以获得较好的横向稳定性和转向控制能力。
安全稳定控制装置在电力系统的应用 安全稳定控制装置在电力系统的应用 摘要:随着电网网架结构的不断壮大,电网的安全可靠运行变的越来越重要,安全稳定控制装置在电网的应用,极大的保证了电网的安全可靠运行。文中从安全稳定控制装置的发展历程、分类、功能、安装配置、通信连接等方面,简述安全稳定控制装置在电力系统的应用。 关键词:电力系统系统运行安全稳定控制装置 中图分类号:F407.61文献标识码:A 文章编号: 前言 1 电力系统 电力系统的主体结构有电源(水电站、火电厂、核电站等发电厂),变电所(升压变电所、负荷中心变电所等),输电、配电线路和负荷中心。各电源点还互相联接以实现不同地区之间的电能交换和调节,从而提高供电的安全性和经济性。 2 系统运行 系统运行指系统的所有组成环节都处于执行其功能的状态。电力系统的基本要求是保证安全可靠地向用户供应质量合格、价格便宜的电能。所谓质量合格,就是指电压、频率、正弦波形这 3个主要参量都必须处于规定的范围内。电力系统的规划、设计和工程实施虽为实现上述要求提供了必要的物质条件,但最终的实现则决定于电力系统的运行。实践表明,具有良好物质条件的电力系统也会因运行失误造成严重的后果。例如,1977年7月13日,美国纽约市的电力系统遭受雷击,由于保护装置未能正确动作,调度中心掌握实时信息不足等原因,致使事故扩大,造成系统瓦解,全市停电。事故发生及处理前后延续25小时,影响到900万居民供电。据美国能源部最保守的估计,这一事故造成的直接和间接损失达3.5亿美元。60~70年代,世界范围内多次发生大规模停电事故,促使人们更加关注提高电力系
统的运行质量,完善调度自动化水平。 3 安全稳定控制装置的应用 3.1 安全稳定控制装置的发展历程 随着国家经济的高速发展,用户负荷的不断增长,电网作为输送和分配电能的中间环节,亦在不断的发展、不断的改进,以满足用户的需求。 20世纪80年代,我国以行政区划分为基础逐步发张,开始形成区域电网。安全稳定控制装置仅具有简单的低频、低压等功能作为第3道防线。2003年形成全国联网的基本框架,兼具第2道、第3道防线的大区域稳定控制装置开始应用。 3.2 安全稳定控制装置的分类 安全稳定控制装置可分位就地型、区域型、混合型。 就地型:根据电力系统中某一地方的就地信息进行判别,一旦满足设定的启动、动作值时发出动作命令;在切除部分负荷后,再次对就地信息进行判别,如有需要继续切除负荷,直至系统正常运行,实现电力系统的第3道防线。 区域型:电力系统第2道防线是允许切除电源或负荷,以保证系统的稳定运行。要实现这个功能,首先要根据控制范围,收集控制范围内电网网架结构的实时运行信息,根据实时运行情况,与目前情况下能保证系统正常运行的参数进行比较,根据比较结果做出相应的选择,通常通过区域型安全稳定控制装置实现。区域型安全稳定控制装置,能通过预先设置好的稳控策略,当发生故障时,及时切除负荷,保证电网的正常运行。随着电网网架结构的不断变化,稳控策略需不断的及时更新,才能更为有效的保证系统运行安全。 混合型:随着电网网架结构的不断变化,电力系统的第2道防线和第3道防线,很多情况下,在一个系统或装置上实现。区域性安全稳定控制装置具备远方功能的同时,具备就地联切功能,可以克服就地型和区域型安全稳定控制装置单独使用时的不足。 3.3 安全稳定控制装置的功能 以广东电网为例,截止2012年初,广东电网共设置1个中调管理主站、2个控制主站、12个控制子站及其所属的59个切机切负荷
研究生课程教学大纲 课程编号:00212724 课程名称:车辆动力学与控制 英文名称:Railway Vehicle Dynamics and Control 学时:32 学分:2 适用学科:机车车辆,车辆工程,机械设计,自动化控制 课程性质:机械设计与车辆工程选修 先修课程:高等线性代数,数值方法,工程控制基础,机械原理,机械振动一、课程的性质及教学目标 本课程作为机械设计与车辆工程等相关专业的选修课程,通过课堂教学与研讨,了解并掌握现代轨道车辆动力学建模与仿真分析方法。 二、课程的教学内容及基本要求 为了掌握现代轨道车辆设计理论,本课程着重如下方面讲解和介绍:①基于轮轨匹配的车辆横向稳定性分析理论和方法;②刚柔耦合仿真技术及其在轨道车辆设计上的应用;③频响分析方法及振动疲劳控制研究。 为此,本课程要求:①为了比较好地理解与掌握本课程学习内容和方法,学生应当具备机械振动、结构动力学等相关的基础理论知识;②为了更加具体生动地进行专题讲解,本课程课堂教学采用实际问题分析-概念模型建立-数学模型简化方式,因而要求学生必须做好相应的理论知识准备等工作;③为了能够掌握和运用动态仿真的分析方法,本课程结合目前课题研究内容安排实例讲解,因而要求学生独立完成某一专题仿真分析,并撰写专题小论文作为考核。
三、课内学时分配 1、陈泽深,王成国,铁路车辆动力学与控制[M],中国铁道出版社,2004.5(第一版)
2、张亚辉,林家浩,结构动力学基础[M],大连理工大学出版社,2007.5(第一版). 五、教学与考核方式 C+D: 课程论文,并参考平时成绩。 编写人(签字):朴明伟编写时间:2012-06-26