目录
摘要 ............................... 错误!未定义书签。ABSTRACT ............................ 错误!未定义书签。前言 ............................... 错误!未定义书签。微分方程稳定性分析原理.................. 错误!未定义书签。捕鱼业的持续收获模型 ................... 错误!未定义书签。种群的相互竞争模型..................... 错误!未定义书签。参考文献 ............................ 错误!未定义书签。
摘要
微分方程稳定性理论是微分方程的一个重要的理论。微分方程理论就是通过一些定量的计算来研究系统的稳定性,也就是系统在受到干扰项偏离平衡状态后能否恢复到平衡状态或者是平衡状态附近的位置。用微分方程描述的物质运动的特点依赖于初值,而初值的计算或者测定不可避免的又会出现误差和干扰。如果描述这个系统运动的微分方程的特解是不稳定的,则初值的微小误差和干扰都会导致严重的后果。因此,不稳定的特解不适合作为我们研究问题的依据,只有稳定的特解才是我们需要的。本文就一阶微分方程和二阶微分方程的平衡点及稳定性进行了分析,并且建立了捕鱼业持续收获模型和两种群相互竞争模型。
【关键词】微分方程;平衡点;稳定性;数学建模
ABSTRACT
Differential equation stability theory is an important theory of differential equations. Differential equation theory is to study the stability of the system by some quantitative calculation, also is the system in the disturbance of deviating from the equilibrium state after the item will return to equilibrium or is near the equilibrium position. Using differential equation to describe the characteristics of the material movement depends on the initial value, and the calculation of initial value or determination of the inevitable will appear the error and interference. If the special solution of the differential equation describing the system movement is unstable, the initial value of small errors and interference will lead to serious consequences.
Therefore, special solution is not suitable for the unstable as the basis of our research question, only stable solution is we need. In this paper, the first order differential equation of second order differential equation and the balance and the stability are analyzed, and the fishing sustained yield model is established and two species and two species competing models.
【key words】Differential equations; Balance; Stability; Mathematical modeling
前言
在现实世界里,无论是在自然科学或者是社会科学的各领域中,存在着许许多多的变化规律可以用某些特定的数学模型来进行描述。例如我们通过对该数学模型进行定性分析或者是数值模拟,用得到的结果对描述的变化规律给出相应的数学解释,进而为人们跟进一步地理解和认识相对应的现象,或者对某些过程进行控制。但在实际问题中,有时候我们建立数学模型的目的并不是单纯的为了得到事物变化的某一瞬间的形态,而是为了得到在一段相当长的时间后该变化的趋势。就像在某种条件下描述的过程变量会无限地接近某个确定的数值,在某种情况下描述的过程变量会渐渐地偏离该数值出现过程的不稳定。为了分析该种情况下的稳定和不稳定规律,我们可以直接利用微分方程的稳定性理论来研究平衡状态。
一.微分方程稳定性分析原理
1.一阶方程的平衡点及稳定性
设有微分方程
()()x t f x '= () 如果方程等号右端不是显然含有自变量t ,我们就称之为自治方程。代数方程 的实根 称为方程式()的平衡点(奇点)。它也是方程()的解。
如果存在某个领域,使方程式()的解 从这个领域的某个点(0)x 出发,满足
0lim ()t x t x →∞
=
则称平衡点0x 是稳定的(渐进稳定);否则,称0x 是不稳定的(非渐进稳定)。
判断平衡点0x 是否稳定通常使用的方法有两种。利用定义式()的方法称为间接法。不求方程式()的因而不方程式()的方法称为直接法。下面介绍直接法。
将()f x 在0x 点处作泰勒展开,只取一次项,方程式()可近似为
00()()()x t f x x x ''=-
方程式(3)称为方程式(1)的近似线性方程, 也是方程式(3)的平衡点。关于0x 点稳定有如下结论:
(1).若0()f x '<0 ,则 对于方程式()和()都是稳定的; (2).若0()f x '>0 ,则 对于方程式()和()都是不稳定的。
0x 对于方程式()的稳定性很容易通过定义式()证明。
记0()f x '=a ,则方程式(3)的一般解为 0()at x t ce x =+
其中,c 是有初始条件确定的常数。显然,当a <0时,方程式()成立。
2.二阶方程的平衡点和稳定性
二阶方程可用两个一阶方程表示为
1
12212()(,)()(,)
x t f x x x t g x x '=??
'=? () 等号右端不显然含t ,是自治方程。代数方程组
1212
(,)0
(,)0f x x g x x =??
=? 的实根011x x =,022x x =称为方程式()的平衡点。记作00012(,)p x x 。
如果存在谋和领域,使方程式()的解1()x t ,2()x t 从这个领域的某个
[]12(0),(0)x x 出发,满足
001122lim (),lim ()t t x t x x t x →∞
→∞
== ()
则称平衡点0p 是稳定的(渐进稳定);不然,称0p 是不稳定的(不渐进稳定)。 为了用直接法讨论方程式()的平衡点的稳定性,先看线性系数方程
11122
21122
()()x t a x a x x t b x b x ?'=+??
'=+?? () 系数矩阵记作
122a a A b b ??=????
为研究方程式()的唯一平衡点 的稳定性,假定A 的行列式
det 0A ≠ ()
0(0,0)p 的稳定性由式()的特征方程
det()0A I λ-= ()
的根 (特征根)决定。方程式()可以写成更加清晰的形式
2120
()det p q p a b q A λλ?++=?
=-+??=?
将特征根记作12,λλ,则
121,(2
p λλ=-
因此方程式()的一般解的形式为
121212()t t c e c e λλλλ+≠或111212()t t c e c te λλλλ-+=
其中,1c ,2c 为任意常数。
根据稳定性的定义式()可知,当12,λλ为负数或有负实部时,0(0,0)p 是稳定平衡点;
当12,λλ有一个为正数或有正实部时,0(0,0)p 是不稳定平衡点。在式()的条件下,12,λλ不可能为零。
微分方程稳定性理论讲平衡点分为结点,焦点,鞍点,中心等类型,完全由特征根12,λλ或者是相对应的,p q 取值决定。表一简单明了地给出了这些结果,表中最后一列值是按照定义式()得到的关于稳定性的结论。
由表一可以看出,根据特征方程系数,p q 的正负可以判断平衡点的稳定性,准则如下:
(1) 若p>0,q>0,则平衡点稳定; (2) 若p<0或q<0,则平衡点不稳定。
表一·稳定性条件判定
以上是对线性方程式()的平衡点0(0,0)p 稳定性的结论,对于一般的非线性方程式(),可以用近似线性方法判断其平衡点0(0,0)p 的稳定性。在0p 点处将
12(,)f x x 和12(,)g x x 做泰勒展开,只取一次项,得到非线性方程式()的近似线
性方程。
12120000001
12111222000000
2
12111222()(,)()(,)()()(,)()(,)()x x x x x t f x x x x f x x x x x t g x x x x g x x x x '?=-+-??'=-+-?? () 记系数矩阵为
121
200
012(,)x x x x f f A p x x g g ??=?
?????
特征方程系数为
10(),det x x p f g p q A =-+=
显然,0p 点对于近似方程()的稳定性由表一或者准则(),()决定,而且得出以下结论,若近似线性方程式()的特征根不为零或者实部不为零,那么
0p 点对于方程式()的稳定性与对于近似线性方程式()的稳定性相同,即由
准则(1),(2)决定。
最后,提出几点注意事项:
(1)平衡点及其稳定性的概念只对自治方程和方程式()才有意义。 (2)非线性方程式()及式()的平衡点稳定性分别与相对应的近似线性方程式()和近似线性方程式()的平衡点稳定性相同,且是在 非临
界情况下(0a ≠或者p ,0q ≠)才相同。在临界情况下(0a =或 者p ,0q =)二者的平衡点稳定性可能不相同。
(3)在讨论平衡点稳定性时,对初始点式的要求是存在一个领域,这是局部稳定的定义。如果要求对任意的初始点,方程式()和方程式()成立,称为全局稳定。对于线性方程,局部稳定和全局稳定是等价的,对于非线性方程,二者不同。
(4)对于临界情况和非线性方程的全局稳定,可以用相轨线分析方法讨
论。
二.捕鱼业的持续收获模型
渔业资源是一种可再生资源,再生资源我们也要注意开发利用。我们既不能为了一时高产而竭泽而渔,那样肯定后破坏渔业资源的再生产;反过来,如果我们过分限制了渔业资源的捕捞,又会造成渔业资源的浪费。在一个渔场中,其中的鱼按照自然规律生长。如果捕捞量等于增长量,那么渔场的总量将保持在某一数值上。最佳捕捞量的确定就是本章节研究的内容。
模型假设:
1.设在t 时刻下渔场的鱼量为()x t ;
2.在无捕捞的条件下鱼量的增长服从Logistic 规律。即
()()(1)x
x t f x rx N
==-
& 其中,r 为固有增长率;N 为环境的最大容纳鱼量;()f x 为单位时间增长量; 3.单位时间的捕捞量()g x 与渔场鱼量()x t 成正相关,比例系数k 称为捕捞强度: ()g x kx =
模型建立(产量模型):
根据以上假设,我们可以得出捕捞情况下渔场鱼量的一个微分方程,记为:
()(1)x
x t rx kx N
=-
-& () 我们关心的是k 在取何值的时候才能保证在渔业稳定的情况下获得最大持续产量。为此我们可以直接求出方程式()的平衡点并分析其稳定性。
模型求解:
令()()()(1)0x
F x f x g x rx kx N
=-=-
-=,得到两个平衡点: 1(1)k
x N r
=-,20x =。 ()
可以算出2()x
F x r k N
'=--,则
1()F x k r '=-,2()F x r k '=-,所以
1.若k r <,有1()F x '<0,2()F x '>0;则1x 点稳定,2x 点不稳定。
2.若k r >,有1()F x '>0,2()F x '<0;则1x 点不稳定,2x 点稳定。
3.若k r =,r 为最大增长率。
上述分析表明只要捕捞适度,即捕捞强度小于自然增长率(k r <)就可以使鱼量保持在1x 点处,并获得持续产量11()()g x k x =;当捕捞过度,即捕捞强度大于自然增长率(k r >)就会导致鱼量减至2x =0,当然就谈不上持续产量了。
在近一步讨论当鱼量稳定在了1x 点时,如何控制捕捞强度k 使得持续产量取得最大的问题。
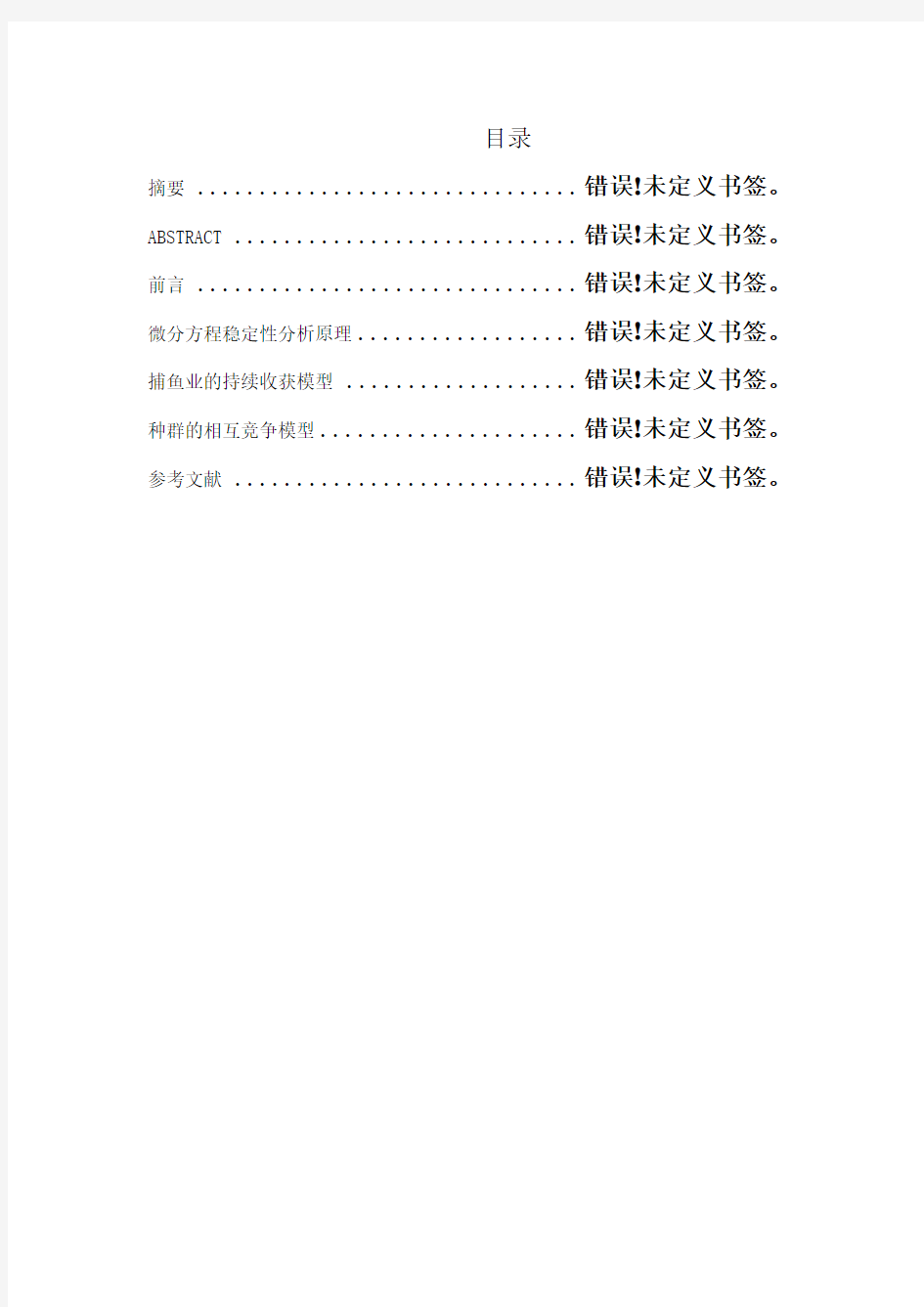
建立直角坐标系作出()(1)x
y f x rx N
==-和()y g x kx ==的图形,如图(1)所示。
图表(1)
注意到()(1)x
y f x rx N
==-在原点处的切线为y rx =,在k r <下y kx =必然与()(1)x
y f x rx N
==-
有交点p ,p 的横坐标就是稳定平衡点1x 。在两条直线之间,当y kx =与()(1)x
y f x rx N
==-在抛物线顶点*p 相交时,可以获得最大持续
产量,此时稳定平衡点为
*2
N
x =
() 且单位时间的最大持续产量为
max 4rN
g =
() 此时可以算出保持渔场鱼量稳定的最大捕捞强度为
max 2
r k =
综上所述,产量模型的结论是将最大捕捞强度控制在自然生长率的一半,或者说是使渔场鱼量保持在最大鱼量的一半时,可以获得持续的最大产量。
建立模型(效益模型): 问题提出:
从经济角度看,保持产量最大,效益不一定就最好,为此我们在保证渔场鱼
量稳定的情况下还得考虑怎样的捕捞强度才能使得经济效益的最大化。
模型假设:
4.假设经济效益是捕捞所获得的收入来扣除捕捞开支后的利润来进行计量;
5.假设鱼的单价为p ,单位捕捞强度为a ,单位时间的利润为R 。
模型建立(效益模型):
R pkx ak =- ()
模型求解:
在稳定条件(1x x =)下,将方程式()代入方程式()中得到
()(1)k
R k pNk ak r
=-- ()
为了求出最大利润,我们对方程式()求导 2()pNk
R k pN a r
'=-
- 当()0R k '=时可以得到满足利润达到最大时的捕捞强度为:
max (1)2r a
k pN
=-
() 将max k 代入1(1)k
x N r
=-可得最大利润下渔场稳定鱼量max x 以及单位时间持
续产量max g 为:
max 22N a x p
=
+ () 2
max max
max 22(1)(1)4x rN a g rx N p N
=-=- ()
通过产量模型与效益模型的结果比较可以看出,在最大效益前提下捕捞强度和持续产量都有所减少,渔场鱼量有所增多。并且当捕捞成本(a )增加时,捕鱼强度和单位时间持续产量将减小,渔场稳定鱼量将增多;当销售价格(p )增加时捕捞强度和单位时间持续产量将增大,渔场稳定鱼量将减少,这显然是符合实际情况的。
建立模型(捕捞过度):
在上述模型中均是以封闭式捕捞为前提,即渔场是由单独的经营者经营并进
行有计划的捕捞。如果是开放式捕捞,那么众多的经营者必然会为了最求自己经济效益的最大化而进行盲目的捕捞,从而造成捕捞过度,那么上述模型将不适用。下面讨论这个模型。
方程式给出了利润与捕捞强度的关系()R k ,令()0R k =的解为s k ,可以解得:
(1)s a
k r pN
=-
() 当s k k <时利润()0R k >,众多的经营者必然会加大捕捞强度;当s k k >时利润()0R k <,他们肯定会减小捕捞强度。所以s k 是开放式捕捞下的临界强度。
我们将方程式()代入式()中可以得出在开放式捕捞下渔场的稳定鱼量为:
s a x p
=
我们可以看出在开放式捕捞下渔场的稳定鱼量完全有成本—价格的比例所决定了,随着价格的上涨和成本的降低,s x 将迅速减小,出现捕捞过度。
通过将方程式()和方程式()进行比较,可得max 2s k k =,即在开放式捕捞下的捕捞强度是最大效益下捕捞强度的2倍。
模型评价与应用:
为了研究渔业的产量,经济效益和捕捞过度的问题,首先在自然增长和捕捞情况的合乎常理的假设下,建立了方程式(),并且运用平衡点稳定性对保持渔场鱼量稳定的条件进行了分析。产量模型,效益模型和过度捕捞模型都是在稳定的前提下一步步进行,一步步深入,推导过程简单,但结果在定性关系上却是与实际情况相符合的。
如果改变了自然增长和捕捞情况的假设,那么模型和结果将改变。
三.两种群的相互竞争模型
在自然界中一直以来就有着这么一句话“适者生存,不适者淘汰”。在同一个自然环境中有多个种群共同存在,它们相互依存或相互竞争亦或是相互捕食。近年来,随着环境问题的日益频发和自然生态平衡的打破,生态学越来越为人们
所重视,数学生态学也应运而生。数学中的抽象概念和推理方法对未来生态学起到了显著地作用。在研究实际问题中,我们关心的或许并不是系统与时间变化的过程,而是系统最终的发展状态(稳定)。
问题提出:
在同一个自然环境中有两个种群生存,它们之间是相互竞争关系,即它们会为了生存而去争夺它们共同的食物和生存空间。在这种情况下,随着时间的推移必然后有一种生物灭亡,另一种生物达到该自然环境下的最大容纳量。本章将从稳定状态角度建立一个模型来分析这种局面的产生条件。
模型假设:
1.假设存在A ,B 两个种群,它们在t 时刻下的数量分别为()1x t ,2()x t ;()1x t ,2()x t 为关于t 的连续函数;
2.当它们分别在同一自然环境下生存时,数量的增长服从Logistic 规律,即:
()11111(1)x x t r x N =-
& 2
222
2
()(1)x x t r x N =-& 其中,1r ,2r ,1N ,2N 分别为A,B 两个种群在该自然环境下的固有增长率和最大容纳量;(1)x
N
-表示的是该物种自身对环境资源的消耗对它本身增长的阻滞作用。
x
N
可以看成是在假设环境资源总量为1下,相对于最大容纳量N 而言单位数量的该物种所消耗的环境资源。
模型建立:
当这两个种群在该自然环境下共同生存时,A 消耗的生物资源必然会对B 的增长产生一定的影响,故而我们可以合理的在2
2
(1)x N -
中减少一项,该项与A 的数量1x 成正比,我们可以得到种群B 的增长方程为:
2122221
()(1)x x
x t r x b N N =-
-& () b 表示的是相对于1N 单位数量的种群A 消耗的生物资源量是相对于2N 单位数量的种群B 消耗的生物资源量的b 倍。
同样的B 的存在于影响了A 的增长,种群B 的增长方程为:
()1211112
(1)x x
x t r x a N N =-
-& () a 表示的是相对于2N 单位数量的种群B 消耗的生物资源量是相对于1N 单位数
量的种群A 消耗的生物资源量的b 倍。
我们可以看出:如果a >1,那么在消耗供养种群A 的生物资源中,种群B 消耗的多于种群A 消耗的,故而种群B 对种群A 的阻滞作用大于种群A 本身对于自己的阻滞作用,即种群B 的竞争力强于种群A ;如果b >1,那么在消耗供养种群B 的生物资源中,种群A 消耗的多于种群B 消耗的,故而种群A 对于种群B 的阻滞作用大于种群B 本身对于自己的阻滞作用,即种群A 的竞争力强于种群B 。
由于a ,b 之间没有确切的数量关系,故我们认为两个种群在消耗资源中对物种A 的阻滞作用和对物种B 的阻滞作用是相同的。因为单位数量的种群A 和B 消耗的供养种群A 的生物资源的比为1:a ,消耗供养种群B 的生物资源的比为
b :1,阻滞作用相同即1:a =b :1,我们可以定量表示为
ab =1
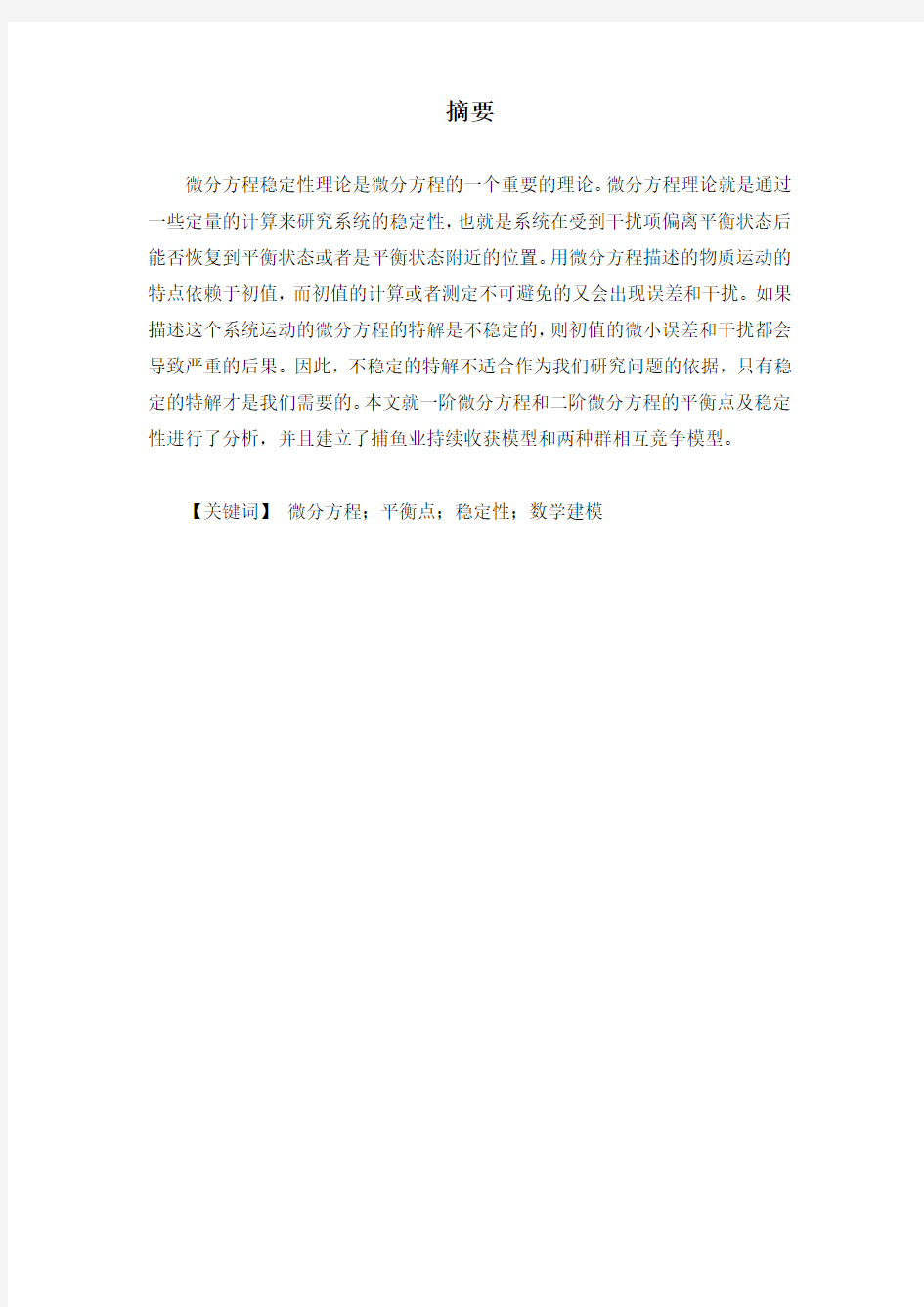
我们假设1N =100,2N =100,a =2,b =,1r =3,2r =2,1(0)x &=10,2(0)x &=10,
运用MATLAB 编程如下:
function dx=shier(t,x,r1,r2,N1,N2,a,b) N1=100,N2=100,a=2,b=,r1=3,r2=2;
dx=[r1*x(1)*(1-x(1)/N1-a*x(2)/N2);r2*x(2)*(1-b*x(1)/N1-x(2)/N2)];
>>ts=0::15; x0=[10,5]; [t,x]=ode45('shier',ts,x0); [t,x]
plot(t,x), grid,gtext('x1(t)'),gtext('x2(t)') pause,
plot(x(:,1),x(:,2)), grid,xlabel('x1'),ylabel('x2') 得出图像如下所示:
图表(2)
图表(3)
稳定性分析:
根据方程式()和方程式()求解代数方程组
121211221122
21(,)(1)0(,)(1)0
x x f x x ax a N N x x g x x bx b N N ?
=--=??
??=--=??
()
得到四个平衡点:
11(,0)p N =,22(0,)p N =,123(1)(1)
(
,)11N a N b p ab ab
----,4(0,0)p =
因为平衡点只有在平面坐标系第一象限的时候,才具有实际的意义,故而对于3p 而言则,a b 同时小于1,或者大于1。
我们可以看出只有12,p p 点是稳定的,故而两种群竞争必然会有一个灭亡。
参考文献
1.冯杰,黄力伟.《数学建模原理与案例》北京:科学出版社,2007
2.王春程,苏颖.《微分方程建模与分析》北京:科学出版社,2014
3.张锦炎.《常微分方程几何理论与分支问题》北京:北京大学出版社,1987
4.王定江.《应用偏微分方程》浙江:浙江大学出版社2007
5.何正风.《MATLAB在数学方面的应用》北京:清华大学出版社,2012
6.王景艳,杨艳丽.《微分方程的平衡点及稳定性分析》文章编号:1674-9340(2010)02-052-03
7.孙国祥.《微分方程稳定性在数学模型中的应用》文章编号:1008-830X(2012)04—0374-05
8.冯立邱.《对常微分方程的稳定性分析》辽宁省阜新市细河区职业教育中心
第六章 非线性微分方程和稳定性 在19世纪中叶,通过刘维尔的工作,人们已经知道绝大多数的微分方程不能用初等积分方法求解.这个结果对于微分方程理论的发展产生了极大影响,使微分方程的研究发生了一个转折.既然初等积分法有着不可克服的局限性,那么是否可以不求微分方程的解,而是从微分方程本身来推断其解的性质呢?定性理论和稳定性理论正是在这种背景下发展起来的.前者由法国数学家庞加莱(Poincar é,1854-1912)在19世纪80年代所创立,后者由俄国数学家李雅普罗夫(Liapunov,1857-1918)在同年代所创立.它们共同的特点就是在不求出方程的解的情况下,直接根据微分方程本身的结构和特点,来研究其解的性质.由于这种方法的有效性,近一百多年以来它们已经成为常微分方程发展的主流.本章对定性理论和稳定性理论的一些基本概念和基本方法作一简单介绍. §6.1 引言 考虑微分方程 (,)d f t dt =x x (6.1) 其中函数(,)f t x 对n D R ∈?x 和t ∈(-∞,+∞)连续,对x 满足局部李普希兹条件. 设 方程(5.1)对初值(t 0,x 1)存在唯一解01(,,)x t t x ?=,而其它解记作00(,,)x x t t x =.现在的问题是:当01x x -很小时,差0001(,,)(,,)x t t x t t x ?-的变化是否也很小?本章向量1(,...,)T n x x =x 的范数取1 221 ()n i i x ==∑x . 如果所考虑的解的存在区间是有限闭区间,那么这是解对初值的连续依赖性,第2章的定理2.7已有结论.现在要考虑的是解的存在区间是无穷区间,那么解对初值不一定有连续依赖性(见下面的例3),这就产生了李雅普诺夫意义下的稳定性概念. 如果对于任意给定的0ε>和00t ≥都存在0(,)0t δδε=>,使得只要0x 满足
带有时滞的动力系统的运动稳定性 分五部分内容,第一部分是Понтрягин定理,给出解实部、虚部的形式;第二部分分析了线性系统的一般性质、特征方程重根时解的表示和解的指数估计;第三部分讨论解的存在唯一性;第四部分探讨解的表达式;第五部分给出Фрид定理。以此说明特征方程根的实部的符号可以用以判断带有时滞的线性系统的稳定性。 直接法的基本定理 一、Понтрягин定理 要讨论的常系数线性系统的滞量τ为常数,所指的滞后型与中立型系统分别为1()()n i ij j ij j j x a x t b x t τ=??=+-??∑, 1 ()()()n i ij j ij j ij j j x a x t b x t c x t ττ=??=+-+-??∑,1,2, ,i n =0τ>, 这时,相应的特征方程分别是0ij ij ij a b e λτδλ-+-=, 0ij ij ij ij a b e c e λτλτλδλ--++-=。 对0τ=的情形0ij ij ij a b e λτδλ-+-=为一代数方程1 10n n n P P λλ -+++=。 在常微分方程解的稳定性理论中,关于特征方程()0P λ=的根的实部符号这样一个问题是极其重要的。如果给了方程组的平衡态之位置及其对应的特征多项式()P λ,则欲是平衡态的位置稳定,其充要条件是特征多项式()P λ的所有根都有负实部。 但是,现在的特征方程0ij ij ij a b e λτδλ-+-=,0ij ij ij ij a b e c e λτλτλδλ--++-=已不再是代数方程,可系统的稳定性仍然与特征根的分布紧紧联系在一起,这两个特征方程的一切根i λ都有0i Re λδ≤<时,系统 1()()n i ij j ij j j x a x t b x t τ=??=+-??∑, 1 ()()()n i ij j ij j ij j j x a x t b x t c x t ττ=??=+-+-??∑,1,2, ,i n =0τ>
第五节 微分方程稳定性理论简介 这里简单介绍下面将要用到的有关内容: 一、 一阶方程的平衡点及稳定性 设有微分方程 ()dx f x dt = (1) 右端不显含自变量t ,代数方程 ()0f x = (2) 的实根0x x =称为方程(1)的平衡点(或奇点),它也是方程(1)的解(奇解) 如果从所有可能的初始条件出发,方程(1)的解()x t 都满足 0lim ()t x t x →∞ = (3) 则称平衡点0x 是稳定的(稳定性理论中称渐近稳定);否则,称0x 是不稳定的(不渐近稳定)。 判断平衡点0x 是否稳定通常有两种方法,利用定义即(3)式称间接法,不求方程(1)的解()x t ,因而不利用(3)式的方法称直接法,下面介绍直接法。 将()f x 在0x 做泰勒展开,只取一次项,则方程(1)近似为: 0'()()dx f x x x dt =- (4) (4)称为(1)的近似线性方程。0x 也是(4)的平衡点。关于平衡点0x 的稳定性有如下的结论: 若0'()0f x <,则0x 是方程(1)、(4)的稳定的平衡点。 若0'()0f x >,则0x 不是方程(1)、(4)的稳定的平衡点 0x 对于方程(4)的稳定性很容易由定义(3)证明,因为(4)的一般解是 0'()0()f x t x t ce x =+ (5) 其中C 是由初始条件决定的常数。
二、 二阶(平面)方程的平衡点和稳定性 方程的一般形式可用两个一阶方程表示为 112212 () (,)()(,) dx t f x x dt dx t g x x dt ?=??? ?=?? (6) 右端不显含t ,代数方程组 1212 (,)0 (,)0f x x g x x =?? =? (7) 的实根0012 (,)x x 称为方程(6)的平衡点。记为00 012(,)P x x 如果从所有可能的初始条件出发,方程(6)的解12(),()x t x t 都满足 101lim ()t x t x →∞ = 20 2lim ()t x t x →∞ = (8) 则称平衡点00 012(,)P x x 是稳定的(渐近稳定);否则,称P 0是不稳定的(不渐 近稳定)。 为了用直接法讨论方法方程(6)的平衡点的稳定性,先看线性常系数方程 11112 22122 () ()dx t a x b x dt dx t a x b x dt ?=+??? ?=+?? (9) 系数矩阵记作 1 12 2a b A a b ??=???? 并假定A 的行列式det 0A ≠ 于是原点0(0,0)P 是方程(9)的唯一平衡点,它的稳定性由的特征方程 det()0A I λ-= 的根λ(特征根)决定,上方程可以写成更加明确的形式: 2120()det p q p a b q A λλ?++=? =-+??=? (10) 将特征根记作12,λλ,则
第四讲 微分方程解的稳定性 上一讲,我们利用最大值原理讨论了新古典经济增长模型,得到了两个方程,一个是状态变量的转移方程,另一个是欧拉方程。这两个方程构成了包含状态变量和控制变量的二元一次方程组。 []δα--=-) ()()()()(1 t k t c t k t k t k []δραα--=-1 )() ()(t k t c t c 这个方程组是一个非线性微分方程组,一般情况下,非线性方程组不存在解析解,即方程组的解不能用初等函数来表示。因此,他们的性质需要借助其他方法来了解。 微分方程:变量为导数的方程叫做微分方程。 常微分方程:只有一个自变量的微分方程叫做常微分方程。 偏微分方程:有两个或两个以上自变量的方程叫做偏微分方程。 微分方程的阶:微分方程中变量的导数最高阶叫做方程的阶。 线性方程:方程的形式是线性的。 例如,方程0)()()()(321=+++t x t y a t y a t y a 是一个二阶线性常微分方程。 又如,索洛-斯旺模型的基本方程是一个非线性方程: ())()()(t k t k s t k ?-=δα 再如,拉姆齐模型的动态是下列微分方程组的解: []δα--=-) ()()()()(1 t k t c t k t k t k []δραα--=-1 )() ()(t k t c t c 一、 一阶微分方程 一阶微分方程可以用下面的方程表示 ),(y x f dx dy = (1.1) 其中,函数R R R f →?:是连续可微函数。 最简单的微分方程是
)(x f dx dy = (1.2) 它的解可表示为不定积分: ?+=c dx x f y )( (1.3) 其中,?dx x f x F )()(=表示任意一个被被积函数,c 为任意常数。当然,我们也可以确定任意一个被积函数,例如,令??x dt t f dx x f x F 0)()()(==, 则(2.2)的不定 积分可表示为 ?+x c dt t f y 0)(= 这时,不定积分仍然代表无穷多条曲线,如果给出初始条件0)0(y y =, 则,上面微分方程的解就是 ?+x y dt t f y 00)(= (1.4) 二、 常见的一阶微分方程解法 1. 一阶线性微分方程 一阶线性微分方程的一般形式为 )()(x g y x p dx dy =+ (2.1) 边界条件(即初始条件)0)0(y y =。 为求解线性微分方程,在方程的两边同乘以?x dt t p 0)(ex p , 则方程的左边为 dx dt t p y d y dt t p x p dt t p dx dy x x x ??? ???= ?+???0 00)(exp )(exp )()(exp 所以 ??? ??=??? ?????x x dt t p x g dx dt t p y d 00)(exp )()(exp (2.2) 方程(2.2)的解为 ?? ????+? ?? ????? ??-=???c dt t p x g dt t p y x x x 000)(exp )()(exp (2.3) 2. 可分离变量的微分方程
摘要 本文给出了微分方程稳定性的概念,并举了一些例子来说明不同稳定性定义之间的区别和联系。这些例子都是通过求出方程解析解的方法来讨论零解是否稳定。在实际问题中提出的微分方程往往是很复杂的,无法求出其解析解,这就需要我们从方程本身来判断零解的稳定性。所以我们讨论了通过Liapunov稳定性定理来判断自治系统零解的稳定性,并用类似的方法讨论了非自治系统零解的稳定性。在此基础上,讨论了一阶和二阶微分方程的平衡点及其稳定性,这对其研究数学建模的稳定性模型起到很大的作用,并且利用相关的差分方程的全局吸引性研究了具时滞的单种群模型 ()()()() () .1 1N t N t r t N t cN t ττ -- = -- 的平衡点1 x=的全局吸引性,所获结果改进了文献中相关的结论。关键词:自治系统平衡点稳定性全局吸引性
Abstract In this paper,we gived the conceptions of differential equation stability. Simultaneously a number of examples to illustrate the difference between the definition of different stability and contact. These examples are obtained by analytical solution equation method to discuss the stability of zero solution. Practical issues raised in the often very complicated differential equations, analytical solution can not be obtained, which requires us to determine from the equation itself, the stability of zero solution. So we discussed the stability theorem to determine through the stability of zero solution of autonomous systems, and use similar methods to discuss the non-zero solution of autonomous system stability. On this basis,we discuss a step and the second-step and the stability, which plays the major role to its stability of the model, and the global attractivity of the positive equilibrium 1 x=of the following delay single population model ()()()() () .1 1N t N t r t N t cN t ττ -- = -- is investigated by using the corresponding result related to a difference equation.The obtained results improve some known results in the literature. Key Words:autonomous system;equilibrium point;stability;delay;globally asymptotic stability;global attractivity
第5章定性和稳定性理论简介 在十九世纪中叶,通过Liouville等人的工作,人们已经知道绝大多数微分方程不能用初等积分法求解.这个结果对微分方程理论的发展产生了极大的影响,使微分方程的研究发生了一个转折.既然初等积分法有着不可克服的局限性,那么是否可以不求微分方程的解,而从微分方程本身来推断其性质呢?定性理论和稳定性理论正是在这种背景下发展起来的.前者由法国数学家Poincare(1854-1912)在19世纪80年代所创立,后者由俄国数学家Liapunov(1857-1918)在同年代所创立.它们共同的特点就是在不求出方程解的情况下,直接根据微分方程本身的结构与特点,来研究其解的性质.由于这种方法的有效性,近一百多年以来它们已经成为常微分方程发展的主流.本章对定性理论和稳定性理论的一些基本概念和基本方法作一简单介绍. 第一讲§5.1 稳定性(Stability)概念(5课时) 一、教学目的:理解稳定、渐近稳定和不稳定的概念;掌握零解的稳 定、渐近稳定的概念;学会判定一些简单微分方程零 解的稳定和渐近稳定性。 二、教学要求:理解稳定、渐近稳定和不稳定的概念;掌握简单微分 方程零解的稳定和渐近稳定性的判定。 三、教学重点:简单微分方程零解的稳定和渐近稳定性的判定。 四、教学难点:如何把一般解的稳定性转化为零解的稳定性。 五、教学方法:讲练结合教学法、提问式与启发式相结合教学法。 六、教学手段:传统板书与多媒体课件辅助教学相结合。 七、教学过程:
1.稳定性的定义 考虑微分方程组 (,)dx f t x dt = (5.1) 其中函数(,)f t x 对n x D R ∈?和(,)t ∈-∞+∞连续,对x 满足局部Lipschitz 条件。 设方程(5.1)对初值01(,)t x 存在唯一解01(,,)x t t x ?=,而其它解记作00(,,)x x t t x = 。 现在的问题是:当01x x -很小是,差 0001(,,)(,,) x t t x t t x ?-的变化是否也很小?本章向量1 2 (,,,)T n x x x x = 的范数取 1 221n i i x x =?? = ? ?? ∑。 如果所考虑的解的存在区间是有限区间,那么这是解对初值的连续依赖性,在第二章的定理2.7已有结论。现在要考虑的是解的存在区间是无穷区间,那么解对初值不一定有连续依赖性,这就产生了Liapunov 意义下的稳定性概念。 定义 5.1 如果对于任意给定的0 ε>和00t ≥都存在0(,)0 t δδε=>, 使得只要 01x x δ -<,就有 0001(,,)(,,)x t t x t t x ?ε -< 对一切0t t ≥成立,则 称(5.1)的解01(,,)x t t x ?=是稳定的。否则是不稳定的。 定义5.2 假定01(,,)x t t x ?=是稳定的,而且存在11(0)δδδ<≤,使得只要 011x x δ-< ,就有 0001l i m ((,,) (,,))0t x t t x t t x ?→∞ -= ,则称 (5.1)的解01(,,)x t t x ?=是渐近稳定的。 为了简化讨论,通常把解01(,,)x t t x ?=的稳定性化成零解的稳定性问题.下面记00()(,,) x t x t t x =01()(,,)t t t x ??=作如下变量代换. 作如下变量代 换.
常微分方程解的稳定 性(修改)
常微分方程解的稳定性 摘要本文简要介绍了常微分方程解的稳定性理论的相关概念及其在解决微分方程相关问题的重要意义。最后,介绍用李雅普诺夫第二方法构造李雅普诺夫函数来判断常微分方程的稳定性及其在解决常微分方程的稳定性问题中的应用。 关键字:常微分方程稳定性李雅普诺夫函数 V函数构造方法
引言 常微分方程在经历了长期的求精确解的努力后逐渐停滞,庞加莱在分析的基础上引入几何方法 ,开创了常微分方程定性理论 , 同时在分析中引入几何方法 ,搭建起分析与几何之间的沟通桥梁 ,带来了微分方程研究的新突破。李雅普诺夫则在庞加莱定性分析的基础上 ,转而进入了新的稳定性研究。 如今 ,李雅普诺夫稳定性理论被普遍认为是微分方程定性理论的基本成就之一。不仅有精确的定义 ,更有严格的分析证明 ,将微分方程及稳定性理论的研究推向了新的高度。 本文论述常微分方程解的稳定性的定义及其研究常微分方程相关问题的重要思想,并用李雅普诺夫第二方法构造李雅普诺夫函数来判断常微分方程的稳定性及其在解决常微分方程的稳定性问题中的应用。
1、常微分方程稳定性 微分方程自诞生以来就一直以微分方程解的求法为研究中心。数学家在微分方程求解过程中进行了不懈的努力 ,但始终没有从根本上摆脱求确定解的桎梏 ,致使研究的道路越来越窄。 此时单纯的定量分析已不能解决问题 ,必须用一种综合化、整体化的思想加以考虑. 避开微分方程求精确解的定量方法 ,转向运用稳定性方法探求解的性质 ,从而解决常微分方程(组)的解的问题. 考虑微分方程组 (2.1) 其中函数对和连续,对 满足局部利普希茨条件。 设方程(2.1)对初值存在唯一解 , 而其他解记作 . 本文中向量的范数取 . 如果所考虑的解的存在区间是有限闭区间,那么这是解对初值的连续依赖性。现在要考虑的是解的存在区间是无穷区间,那么解对初值不一定有连续依赖性,这就产生的李雅普诺夫意义下的稳定性概念。 如果对于任意给定的和都存在 , 使得只要 就有 对一切成立,则称(2.1)的解是稳定的,否则是不稳定的。 假设是稳定的,而且存在, 使得只要
目录 摘要 ............................... 错误!未定义书签。ABSTRACT ............................ 错误!未定义书签。前言 ............................... 错误!未定义书签。微分方程稳定性分析原理.................. 错误!未定义书签。捕鱼业的持续收获模型 ................... 错误!未定义书签。种群的相互竞争模型..................... 错误!未定义书签。参考文献 ............................ 错误!未定义书签。
摘要 微分方程稳定性理论是微分方程的一个重要的理论。微分方程理论就是通过一些定量的计算来研究系统的稳定性,也就是系统在受到干扰项偏离平衡状态后能否恢复到平衡状态或者是平衡状态附近的位置。用微分方程描述的物质运动的特点依赖于初值,而初值的计算或者测定不可避免的又会出现误差和干扰。如果描述这个系统运动的微分方程的特解是不稳定的,则初值的微小误差和干扰都会导致严重的后果。因此,不稳定的特解不适合作为我们研究问题的依据,只有稳定的特解才是我们需要的。本文就一阶微分方程和二阶微分方程的平衡点及稳定性进行了分析,并且建立了捕鱼业持续收获模型和两种群相互竞争模型。 【关键词】微分方程;平衡点;稳定性;数学建模
ABSTRACT Differential equation stability theory is an important theory of differential equations. Differential equation theory is to study the stability of the system by some quantitative calculation, also is the system in the disturbance of deviating from the equilibrium state after the item will return to equilibrium or is near the equilibrium position. Using differential equation to describe the characteristics of the material movement depends on the initial value, and the calculation of initial value or determination of the inevitable will appear the error and interference. If the special solution of the differential equation describing the system movement is unstable, the initial value of small errors and interference will lead to serious consequences. Therefore, special solution is not suitable for the unstable as the basis of our research question, only stable solution is we need. In this paper, the first order differential equation of second order differential equation and the balance and the stability are analyzed, and the fishing sustained yield model is established and two species and two species competing models. 【key words】Differential equations; Balance; Stability; Mathematical modeling
§6.4 李雅普诺夫第二方法上一节我们介绍了稳定性概念,但是据此来判明系统解的稳定性,其应用范围是极其有限的. 李雅普诺夫创立了处理稳定性问题的两种方法:第一方法要利用微分方程的级数解,在他之后没有得到大的发展;第二方法是在不求方程解的情况下,借助一个所谓的李雅普诺夫函数)(x V 和通过微分方程所计算出来的导数 dt x dV ) (的符号性质,就能直接推断出解的稳定性,因此又称为直接法.本节主要介绍李雅普诺夫第二方法. 为了便于理解,我们只考虑自治系统 )(x F dt dx =n R x ∈ (6.11) 假设T n x F x F x F ))(,),(()(1 =在{} K x R x G n ≤∈=上连续,满足局部利普希茨条件,且 O O F =)(. 为介绍李雅普诺夫基本定理,先引入李雅普诺夫函数概念. 定义6.3 若函数 R G x V →:)( 满足0)(=O V ,)(x V 和 i x V ??),,2,1(n i =都连续,且若存在K H ≤<0,使在{} H x x D ≤=上)0(0)(≤≥x V ,则称)(x V 是常正(负)的;若在D 上除O x ≠外总有 )0(0)(<>x V ,则称)(x V 是正(负)定的;既不是常正又不是常负的函数称为变号函数. 通常我们称函数)(x V 为李雅普诺夫函数.易知: 函数2 22 1x x V +=在),(21x x 平面上为正定的; 函数 )(2 22 1x x V +-=在),(21x x 平面上为负定的; 函数222 1x x V -=在),(21x x 平面上为变号函数;
函数 2 1x V =在),(21x x 平面上为常正函数. 李雅普诺夫函数有明显的几何意义. 首先看正定函数),(21x x V V =. 在三维空间),,(21V x x 中, ),(21x x V V =是一个位于坐标面21Ox x 即0=V 上方的曲面.它与坐标面21Ox x 只在一个点,即原点)0,0,0(O 接触(图6-1(a)).如果用水平面 C V =(正常数)与),(21x x V V =相交,并将截口垂直投影到21Ox x 平面上,就得到一组一个套一个的闭曲线族C x x V =),(21 (图6-1(b)),由于),(21x x V V =连续可微,且 0)0,0(=V ,故在021==x x 的充分小的邻域中, ),(21x x V 可以任意小.即在这些邻域中 存在C 值可任意小的闭曲线C V =. 对于负定函数),(21x x V V =可作类似的几何解释,只是曲面),(21x x V V =将在坐标面21Ox x 的下方. 对于变号函数),(21x x V V =,自然应对应于这样的曲面,在原点O 的任意邻域,它既有在21Ox x 平面上方的点,又有在其下方的点. 定理6.1 对系统(6.11),若在区域D 上存在李雅普诺夫函数)(x V 满足 (1) 正定; (2) )(1 ) 11.5(x F x V dt dV i n i i ∑ =??=常负, (a) (b)
微分方程稳定性理论简介 1、一阶自治方程 ()()x t f x = (1) 使代数方程()0f x =的实根=x 0x 称为(1)的平衡点或奇点。0x x =也是方程(1)的解。 设x(t)是方程的解,若从0x 的 某邻域的任一初值出发都有0lim ()t x t x →+∞=,则称0x 是方程(1)的稳定平衡点(渐近稳定);否则,称0x 是方程(1) 的不稳定平衡点。 例 dx x dt =- 判断平衡点稳定性的方法 (1) 间接法:利用定义,需要求出方程的解 (2) 直接法:不求方程的解 方程(1)的近似方程为: ))(()(00x x x f t x -'= (2) 对于一阶方程(1)与(2)的平衡点0x 的稳定性有如下结论: 若0()0f x '<,则0x 是(1)与(2)的稳定平衡点 若0()0f x '>,则0x 是(1)与(2)的不稳定平衡点 2、二阶方程 可用两个一阶方程表示为 ()(,)()(,)x t f x y y t g x y =??=? (3) 二维(平面)自治系统 使 (,)0(,) 0f x y g x y =??=? 的实根000(,)P x y 称为(3)的平衡点。同样,若存在000(,)P x y 的某个邻域的任一初值))0(),0((y x 出发,当t →+∞时 00((),())(,)x t y t x y →,则称000(,)P x y 是稳定的平衡点。 应用直接法讨论(3)的稳定性,先看线性常系数方程 ()()x t ax by y t cx dy =+??=+? (4) 二维(平面)线性自治系统
系数矩阵记做 a b A c d ??=???? ,设det 0A ≠,此时(4)有唯一平衡点0(0,0)P 。它的稳定性由(4)的特征方程 det()0A I λ-= 的根所决定。 2det()()0a b A I a d ad bc c d λλλλλ --==-++-=- 结论: 0????→???????????→???????????????????????????????????→???????→?? - (S 稳定)同号结点相异+ (U )异号鞍点 (U)实根- (S)临界结点+ (U)重根- (S)退化结点+ (U)- (S)实部不为0焦点复根+ (U) 实部为中心(U ) 进一步,令()p a d =-+,det q ad bc A =-=,则特征方程为20p q λλ++=,特征根为 1,21 (2p λ=-± 1)240p q -> i) 0q > 0结点(S )p >→ 0结点(U )p <→ ii) 0鞍点(U )q <→ 2) 240p q -= 0临界(退化)结点(S )p >→0临界(退化)结点(U )p <→ 3) 240p q -< 0焦点(S )p >→0焦点(U )p >→
第四章常微分方程数值解 [课时安排]6学时 [教学课型]理论课 [教学目的和要求] 了解常微分方程初值问题数值解法的一些基本概念,如单步法和多步法,显式和隐式,方法的阶数,整体截断误差和局部截断误差的区别和关系等;掌握一阶常微分方程初值问题的一些常用的数值计算方法,例如欧拉(Euler)方法、改进的欧拉方法、龙贝-库塔(Runge-Kutta)方法、阿达姆斯(Adams)方法等,要注意各方法的特点及有关的理论分析;掌握构造常微分方程数值解的数值积分的构造方法和泰勒展开的构造方法的基本思想,并能具体应用它们导出一些常用的数值计算公式及评估截断误差;熟练掌握龙格-库塔(R-K)方法的基本思想,公式的推导,R-K公式中系数的确定,特别是能应用“标准四阶R-K公式”解题;掌握数值方法的收敛性和稳定性的概念,并能确定给定方法的绝对稳定性区域。 [教学重点与难点] 重点:欧拉方法,改进的欧拉方法,龙贝-库塔方法。 难点:R—K方法,预估-校正公式。 [教学内容与过程] 4.1 引言 本章讨论常微分方程初值问题 (4.1.1) 的数值解法,这也是科学与工程计算经常遇到的问题,由于只有很特殊的方程能用解析方法求解,而用计算机求解常微分方程的初值问题都要采用数值方法.通常我们假定(4.1.1)中 f(x,y)对y满足Lipschitz条件,即存在常数L>0,使对,有 (4.1.2) 则初值问题(4.1.1)的解存在唯一. 假定(4.1.1)的精确解为,求它的数值解就是要在区间上的一组离散点 上求的近似.通常取 ,h称为步长,求(4.1.1)的数值解是按节点的顺序逐步
推进求得.首先,要对方程做离散逼近,求出数值解的公式,再研究公式的局部截断误差,计算稳定性以及数值解的收敛性与整体误差等问题. 4.2 简单的单步法及基本概念 4.2.1 Euler法、后退Euler法与梯形法 求初值问题(4.1.1)的一种最简单方法是将节点的导数用差商 代替,于是(4.1.1)的方程可近似写成 (4.2.1) 从出发,由(4.2.1)求得再将 代入(4.2.1)右端,得到的近似,一般写成 (4.2.2) 称为解初值问题的Euler法. Euler法的几何意义如图4-1所示.初值问题(4.1.1)的解曲线y=y(x)过点,从出发,以为斜率作一段直线,与直线交点于,显然有 ,再从出发,以为斜率作直线推进到上一点,其余类推,这样得到解曲线的一条近似曲线,它就是折线.
i.常微分方程初值问题数值解法 i.1 常微分方程差分法 考虑常微分方程初值问题:求函数()u t 满足 (,), 0du f t u t T dt =<≤ (i.1a ) 0(0)u u = (i.1b) 其中(,)f t u 是定义在区域G : 0t T ≤≤, u <∞上的函数,0u 和T 是给定的常数。我们假设(,)f t u 对u 满足Lipschitz 条件,即存在常数L 使得 121212(,)(,), [0,]; ,(,)f t u f t u L u u t T u u -≤-?∈∈-∞∞ (i.2) 这一条件保证了(i.1)的解是适定的,即存在,唯一,而且连续依赖于初值0u 。 通常情况下,(i.1)的精确解不可能用简单的解析表达式给出,只能求近似解。本章讨论常微分方程最常用的近似数值解法--差分方法。先来讨论最简单的Euler 法。为此,首先将求解区域[0,]T 离散化为若干个离散点: 0110N N t t t t T -=<<<<=L (i.3) 其中n t hn =,0h >称为步长。 在微积分课程中我们熟知,微商(即导数)是差商的极限。反过来,差商就是微商的近似。在0t t =处,在(i.1a )中用向前差商 10()()u t u t h -代替微商du dt ,便得 10000()()(,())u t u t hf t u t ε=++ 如果忽略误差项0ε,再换个记号,用i u 代替()i u t 便得到 1000(,)u u hf t u -= 一般地,我们有 1Euler (,), 0,1,,1n n n n u u hf t u n N +=+=-L 方法: (i.4) 从(i.1b) 给出的初始值0u 出发,由上式可以依次算出1,,N t t L 上的差分解1,,N u u L 。
本文给出了微分方程稳定性的概念,并举了一些例子来说明不同稳定性定义之间的区别和联系。这些例子都是通过求出方程解析解的方法来讨论零解是否稳定。在实际问题中提出的微分方程往往是很复杂的,无法求出其解析解,这就需要我们从方程本身来判断零解的稳定性。所以我们讨论了通过Liapunov稳定性定理来判断自治系统零解的稳定性,并用类似的方法讨论了非自治系统零解的稳定性。在此基础上,讨论了一阶和二阶微分方程的平衡点及其稳定性,这对其研究数学建模的稳定性模型起到很大的作用,并且利用相关的差分方程的全局吸引性研究了具时滞的单种群模型 ()()()() () .1 1N t N t r t N t cN t ττ -- = -- 的平衡点1 x=的全局吸引性,所获结果改进了文献中相关的结论。 关键词:自治系统平衡点稳定性全局吸引性 Abstract In this paper,we gived the conceptions of differential equation stability. Simultaneously a number of examples to illustrate the difference between the definition of different stability and contact. These examples are obtained by analytical solution equation method to discuss the stability of zero solution. Practical issues raised in the often very complicated differential equations, analytical solution can not be obtained, which requires us to determine from the equation itself, the stability of zero solution. So we discussed the stability theorem to determine through the stability of zero solution of autonomous systems, and use similar methods to discuss the non-zero solution of autonomous system stability. On this basis,we discuss a step and the second-step and the stability, which plays the major role to its stability of the model, and the global attractivity of the positive equilibrium 1 x=of the following delay single population model ()()()() () .1 1N t N t r t N t cN t ττ -- = -- is investigated by using the corresponding result related to a difference equation.The obtained results improve some known results in the literature. Key Words:autonomous system;equilibrium point;stability;delay;globally asymptotic stability;global attractivity
常微分方程平衡点及稳定性研究
摘要 本文给出了微分方程稳定性的概念,并举了一些例子来说明不同稳定性定义之间的区别和联系。这些例子都是通过求出方程解析解的方法来讨论零解是否稳定。在实际问题中提出的微分方程往往是很复杂的,无法求出其解析解,这就需要我们从方程本身来判断零解的稳定性。所以我们讨论了通过Liapunov稳定性定理来判断自治系统零解的稳定性,并用类似的方法讨论了非自治系统零解的稳定性。在此基础上,讨论了一阶和二阶微分方程的平衡点及其稳定性,这对其研究数学建模的稳定性模型起到很大的作用,并且利用相关的差分方程的全局吸引性研究了具时滞的单种群模型 ()()()() () .1 1N t N t r t N t cN t ττ -- = -- 的平衡点1 x=的全局吸引性,所获结果改进了文献中相关的结论。关键词:自治系统平衡点稳定性全局吸引性
Abstract In this paper,we gived the conceptions of differential equation stability. Simultaneously a number of examples to illustrate the difference between the definition of different stability and contact. These examples are obtained by analytical solution equation method to discuss the stability of zero solution. Practical issues raised in the often very complicated differential equations, analytical solution can not be obtained, which requires us to determine from the equation itself, the stability of zero solution. So we discussed the stability theorem to determine through the stability of zero solution of autonomous systems, and use similar methods to discuss the non-zero solution of autonomous system stability. On this basis,we discuss a step and the second-step and the stability, which plays the major role to its stability of the model, and the global attractivity of the positive equilibrium 1 x= of the following delay single population model ()()()() () .1 1N t N t r t N t cN t ττ -- = -- is investigated by using the corresponding result related to a difference equation.The obtained results improve some known results in the literature. Key Words:autonomous system;equilibrium point;stability;delay;globally asymptotic stability;global attractivity
东华大学 2013~ 2014学年第II 学期研究生期末考试试题 考试学院:理学院 考试专业:基础数学应用数学 考试课程名称:稳定性分析与分数阶微分方程 学号姓名得分 (考生注意:答案必须写在答题上,写在本试题纸上一律不给分)[试题部分] 一、根据所学知识,概述Lyapunov第二方法的核心思想和基本理 论。 二、针对某一类问题或某个模型,运用Lyapunov第二方法进行 稳定性分析。 三、综述分数阶微积分的三种定义方式及其性质和联系。 四、谈谈你对分数阶微分方程研究的认识和看法。 要求:1. 第二题结合每人曾经报告过的文献来完成; 2. 用电子文档打印,并提交电子文件。
一、根据所学知识,概述Lyapunov 第二方法的核心思想和基本理论 李雅普诺夫(Lyapunov )提出了两种方法,分析运动的稳定性: 第一方法包含许多步骤,包括最终用微分方程的显式解来对稳定性近行分析,是一个间接的方法。 第二方法不是求解微分方程组,而是通过构造李雅普诺夫函数(标量函数)来直接判断运动的稳定性,因此又称为直接法。 李雅普诺夫直接法(也称第二方法)是整个稳定性理论的核心方法,李雅普诺夫1892年提出的稳定性理论、渐近稳定性定理及两个不稳定性定理,奠定了运动稳定性的基础,被誉为稳定性的基本定理。目前仍是研究非线性、时变系统最有效的方法,是许多系统控制律设计的基本工具。 李雅普诺夫第二方法的核心思想: 以二维自治系统为例,李雅普诺夫直接法借助于一个V 函数,利用方程右端的信息来探测解的稳定性的原始几何思想。 考虑方程 ?????==),(),(21222111 x x f dt dx x x f dt dx 0)0,0()0,0(21==f f 其中21,f f 连续,保证解的唯一性. 设),()(21x x V x V =是K 类函数,且],[)(1 21+∈R R C x V ,此方程的解 T t x t x t x ))(),(()(21=的信息是未知的,但它的导数满足 )),(),,((),(2122112. 1. x x f x x f x x =的信息是已知的,因为21,f f 是已知函数. 姑且把任意解)(t x 代入)(x V 得到))((:)(t x V t V =. 粗略的说,平凡解的稳定性(包括渐近稳定性、稳定、不稳定)是由解)(t x “走近”原点,“不远离”原点,“远离”原点来决定的,而这些信息分别等价于 ))((t x V 是t 的下降、不增、上升函数。由于],[)(121+∈R R C x V ,后者又分别等价于 0)) ((,0))((,0))((>≤