
西门子V90伺服111报文
的插入及使用
软件版本:TIA V14 SP1 Professional
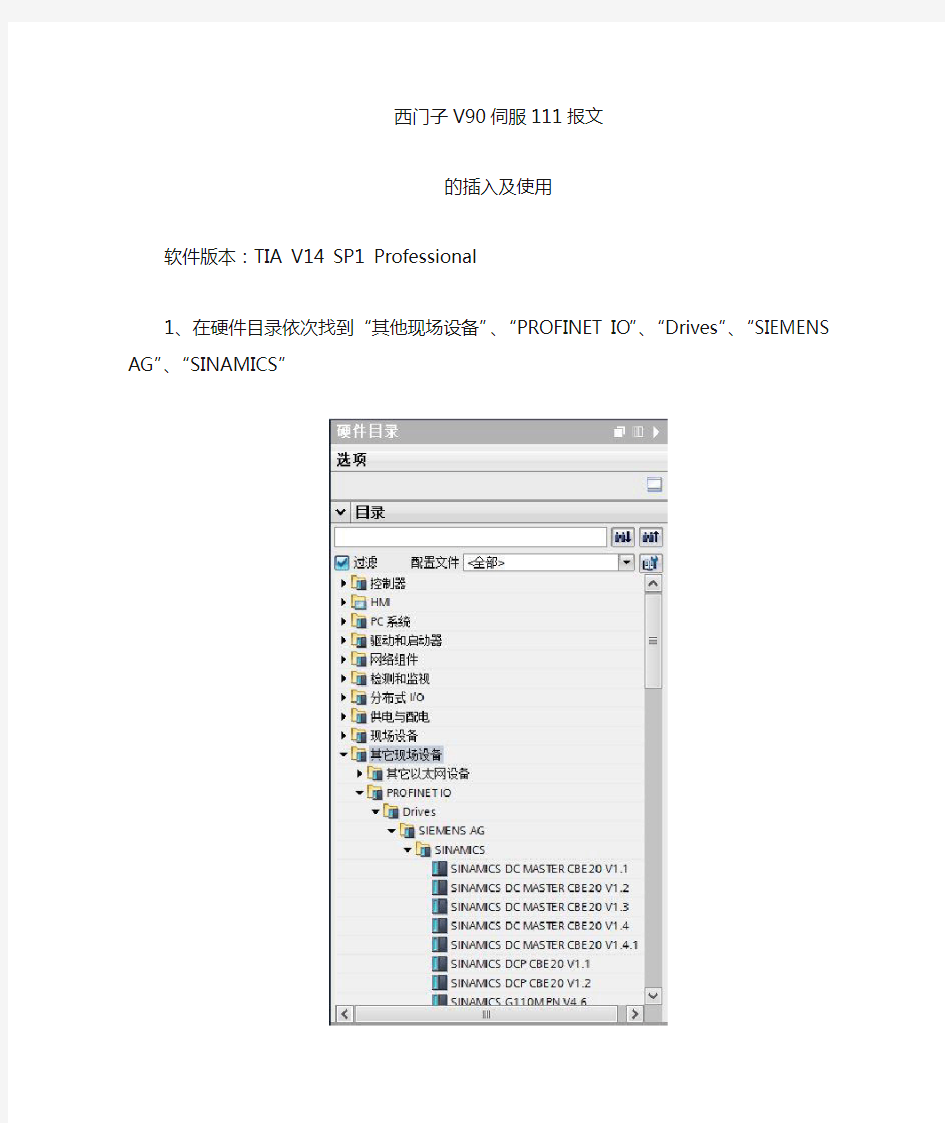
1、在硬件目录依次找到“其他现场设备”、“PROFINET IO”、“Drives”、“SIEMENS AG”、“SINAMICS”
2、在“SINAMICS”中最后一个设备可以看到V90伺服,将其拖入网络视图中,如下图所示
3、进入伺服设备视图,选择“以太网址”,设置“子网”和“IP地址”
4、子网设置好,回到网络视图,点击伺服上的“未分配”,可以看见跳出两个选择,点击“PLC_1.PROFINET借口_1”
5、选择好后,就将该伺服控制器与PLC_1连接起来了,完成效果如下图所示,下面还需将该伺服组态与伺服控制指令块匹配
6、回到伺服设备视图,向左拉出右侧设备概览图,从右侧的子模块里选取“西门子报文111,PZD-12/12”,拖到伺服的设备概览图
7、报文拖进以后,查看报文属性,选择“硬件标识符”,可以看到该报文标识符为“280”,下面需要用到此标识符
8、在程序段里,插入FB284-“SINA_POS”伺服控制指令,该指令可以从右侧全局库里的“Drive_Lib_S7_1200_1500”,“主模板”,“03_SINAMCS”中找到
9、为了将该FB284指令块与上面的伺服设备匹配,将HWIDSTW,HWIDZSW设为报文标识符280
1、在PLC硬件组态里先配置好CU320: 在Survey栏目配置好ControlUnit控制器、INFEEDS电源和DRIVES驱动器的TELEGRAM报文。在Detail栏目配置报文长度和地址。 2、配置完成后编译并保存,在Step7中会自动生成一个伺服配置: 3、双击在STARTER中打开所配置的伺服,选择ONLINE,在线前需要将CU320的DP拨码设置成和硬件组态中定义 的一致。 4、在线后左边栏目中会出现AutoConfiguration选项,点击后选择Servo后会自动生成一个基本配置(包括 ControlUnit控制器、INFEEDS电源和DRIVES驱动器,参数是自动读取上来的),首先需要对INFEEDS和DRIVES 配置CONFIGURATION(默认既可): 5、 6和DRIVES中的一些参数EXPERT—-EXPERTLIST: 7、INFEEDS:P10–0READY;1—QUICKCOMMISSIONING(修改某些参数时需要在1状态,修改完成后需要改为 0),P210Driveunitlinesupplyvoltage驱动器实际供电电压可能和选型不一致。 8、DRIVES:Changeparameterp1821ifneedtochangedirection, p2571formaxspeed,p2572foraccelerationadjust,p2573fordecelerationadjust,p2585jogspeed 如果采用手动方式,需要在Configuredriveunit窗口中逐步配置,并修改以上的参数。 9、报文配置(包括控制器、电源和驱动器):COMMUNICATION--PROFIBUS
这个主要是那个报文的起始地址,起始地址可能有些不同,可以在PLC的硬件组态里可以看到。比如PLC 硬件组态的输出的起始地址是334,到357结束,那么PQW334就是111报文的STW1,PQ334.0-PQ335.7的每一位跟STW1的每一位对应PQW336就是对应POS_STW1,一次往下。一直到PQW356对应最后一个控制字MDI-DEC。输出的也是一次对应状态字,ZSW1,POS_ZSW1.........WARN_CODE 可能出现的问题: 1. S120的基本定位功能必须在项目离线的情况下进行配置,步骤为离线、配置、驱动配置、激活基本定 位、选择111报文、报文结构、传输到硬件组态。配置结束后在线,连接驱动器。读参数r108.3=1,r108.4=1就表示基本定位功能已激活。 2. 硬件限位的设计牵涉到许多方面,有安全回路设计的硬件限位,只能采用强制短路开关暂时短接限位 开关,在此状态下驱动只能通过低速点动退出硬限位 3. 请教个问题,一般是怎么退出硬限位的呀?复位故障后反向转即可. 4. 如果你选择的是s120 的111 报文的话,s120 发给plc 的第6和7个字就是位置实际值,不过它 的单位是LU,负载转一圈的LU值可以在参数p2506 中查到,你要转换成角度值需要自己做一下转换;s120 发给plc 的第8和9个字就是速度实际值。 5. 用111报文使用MDI定位方式作绝对位置控制选择连续数据传输方式时,如何确定定位动作已完成? 可以查看状态位r2683.3,到达位置后其值为1,轴在运行时其值为0请教个问题,为提高定位的动态特性,如何做位置环的优化。 6. 跟速度环的优化没有什么区别,调节比例增益和积分时间,使位置实际值尽可能跟随位置给定,且超 调不要太大。
V90基本定位器控制(EPOS)常问问题 目录 1:SINA_POS怎样实现主动回零(带增量编码器V90,使用参考挡块+编码器零脉冲方式回零时),参考挡块回零开关接到哪里,怎样配置? 2:硬件限位开关怎么接,怎样激活硬件限位功能? 3:运行命令给出后轴不运行? 4:如何激活软件限位开关? 5:excute触发定位动作时90 PN无响应? 6:V90 PN 为什么找不到111报文? 7:在博途中组态V90 PN时为什么找不到111报文? 8:使用STEP7软件,如何实现S7-300/400控制V90PN位置控制? 9:怎样设置机械结构、减速比、模态轴,模态范围怎么设置? 10:EPOS 可以实现位置同步控制吗? 11:FB284如何对ConfigEpos管脚进行配置? 12:FB284中HWIDSTW/HWIDZSW怎么填写?
13:绝对值编码器如何回零? 14:SINA_POS 转速设置及实际值显示? 15:绝对值编码器掉电后位置丢失怎么办? 16:FB284怎样实现绝对定位控制? 17:FB284怎样实现相对定位控制? 18:FB284怎样实现连续运行模式控制? 19:FB284怎样实现程序块运行控制? 20:FB284怎样实现点动"Jog"控制? 21:EPOS模式下机械参数如何设置? 带增量编码器V90,使用参考挡块+编码器零脉冲方式回零时,参考挡块回零开关接到哪里,怎样配置? 回零开关连接到一个PLC的数字量输入点,PLC内编程将其状态关联到FB284功能块ConfigEPos输入引脚的bit6。 (1)将V90参数P29240设置为1(选择参考挡块+零脉冲方式回零); (2)将回零开关连接到一个PLC的数字量输入点; (3)在PLC内编程,将回零开关DI点的状态关联到FB284功能ConfigEPos输入
S120 通过 111 报文来实现 Basic Position 功能 S120 Basic Position Function using Standard Telegram 111
摘要 本文介绍了如何通过西门子标准报文 111来实现 SINAMICS S120 的基本定位功能,较为详细地介绍了点动、回零、限位、程序步以及 MDI 功能。 关键词 SINAMICS S120、基本定位、标准报文 111 Key Words SINAMICS S120、Basic Position、standard telegram 111 IA&DT Service & Support Page 2-25
目录 1.概述 (4) 2.激活基本定位功能 (4) 3. 基本定位_点动(JOG) (7) 4. 基本定位_回零(JOG) (8) 4.1 设置参考点 (Set_Reference) (9) 4.2 主动回零 (Active_homing) (10) 5. 基本定位_手动数据输入(MDI) (16) 6. 基本定位_程序步(Traversing Blocks) (17) IA&DT Service & Support Page 3-25
1.概述 S120 有两种形式: 用于多轴系统的 DC/AC 装置 用于单轴系统的 AC/AC 装置 这两种形式的S120,在 Firmware V2.4 及以上版本都已具备基本定位功能。SINAMICS S120 基本定位功能包括如下内容: ? 点动 (Jog): 用于手动方式移动轴,通过按钮使轴运行至目标点 ? 回零 (Homing/Reference):用于定义轴的参考点或运行中回零 ? 限位 (Limits):用于限制轴的速度、位置。包括软限位、硬限位 ? 程序步 (Traversing Blocks): 共64个程序步,可自动连续执行一个完整的程序也可单步 执行 ? 直接设定值输入/手动设定值输入 (Direct Setpoint Input / MDI):目标位置及运行速度 可由上位机实时控制。 通过 111 报文实现基本定位功能的前提条件: Firmware version: V2.6.1 或更高版本 调试软件:Starter V4.1.3 或更高版本 / SCOUT V4.1.2.4 + SSP 或更高版本/STEP 7 V5.4.4 或更高版本 2.激活基本定位功能 S120 的基本定位功能必须在项目离线的情况下进行配置,具体步骤下图所示: IA&DT Service & Support Page 4-25
1500与V90通信控制 位置模式 注意:GSD和库的安装,打开样例程序即可自动安装,若不能正常安装请按以下步骤插入GSD包,在“选项”——选择“管理通用站描述文件” 把控制指令库放到TIA的Lib-Sys里面,然后重启TIA就可以在“全局库”里找到。 1、在TIA组态V90PN硬件
在“网络视图”中,右边的“硬件目录”中选择“其他现场设备-Drives-SIEMENSAG-SINAMIS",下拉找到V90硬件,拖拽到左边。 左键按住绿色网口图标,移动到对应设备进行网络连接 在网络视图中双击V90PN图标,配置V90PN的报文,位置控制选择111报文。
左键选中V90PN设备,在“属性”栏,命名设备的名称,要和V90驱动的名称一致 驱动的控制模式选择“基本定位器控制”
驱动报文选择“111报文” 斜坡函数发生器选择“生效” 调用SINA_POS对轴进行位置控制,在全局库中选择,打开右边“库”,选择“全局库” SINA_POS指令说明,注意该指令必须使用“111报文”
ModePos: 控制模式选择 1、相对定位 2、绝对定位 5、直接设定零点 6、主动回原点 7、点动模式 Off1:轴使能,RejTrvTsk,IntMStop默认,AckFlt故障复位,Execute启动定位(上升沿),Position设置定位距离(LU),Velocity定位时的速度(LU/min),OverV设定速度百分比输出,OverAcc设定加速度百分比输出,OverDec设定减速度百分比输出,LAddrSP和LAddrAV报文地址,VeloAct实际速度,PosAct实际位置(LU)例:实际设定速度=Velocity*OverV% 注意:点动的速度在驱动里面设定,也可以通过调用SINA_PARA_S修改,VeloAct选择Lreal数据类型,防止数据溢出。 Velocity的设定值和驱动的单圈对应长度(LU)有关,默认设定是10000LU。