
1、 方波振动信号的谐波分析,00,02
(),2
T x t x t T x t T
?
<
解:()x t 的数学表达式可写为: 计算三要素:
()a n =0
2
02
()()sin 22T
n t b n x t dt T T π?? ?= ?
?
??
?
=2
0042sin T
n t x dt T T π?? ???
?=0
2
22cos T n t n T ππ???? ???????=()021cos ,1,2,x n n n ππ-=?????????? =
4,1,3,5x n n
π=?????? 01()cos sin 222n n n a n t n t X t a b T T ππ∞=?? ?
∴=++ ? ?
??
∑
=12sin n n n t b T π∞
=∑=0142sin n x n t n
T ππ∞=∑,n=1,3,5, ??????,02T t <<或2T
t T <<
振幅频谱图
4,1,3,5n n x A b n n
π==
=?????? ()???≤≤-≤≤-=0
2/2/00
t T T t x x t x
相位频谱图
1tan 0,1,3,5
n n n a n b φ
-??
===??????
???
2、 求周期性矩形脉冲波的复数形式的傅立叶级数,绘频谱图。
解: 数学表达式:
计算三要素:
傅立叶级数复数形式:
频谱图
00
00,0sin ,0,n x t n T
A x n t n n n T ππ?=??=?
?≠-∞<<∞??
()????
?????≤≤≤≤--≤≤-=2
202222000
00
T t t t t t x t t T t x 偶函数 T x t a 0002=2sin 2010t
n n x a n ωπ?=0
=n b 2
sin 22010t
n n x a ib a X n n n
n ωπ?==-=()2sin 1101012/2/02/2/102/2
/02/2/010********t n n x t
in e e T x t in e T x dt e x T dt e t x T X t in t in t t t in t in t t t
in T T n ωπωωωωωωω?=--?=-?=??=??=-------?
?T t x t n n x X n 0
0010002sin
lim =?=→ωπ()∑
∑
∞-∞=∞-∞===n t
in n t in n e n t n x e X t x 112sin 0
10ωωωπ
2.1解: (1)能量法
222341222
111
()()222e a a k x k x k x a a += 22
32
122244
e a a k k k a a ∴=+
(2)能量法
2
22 (1214)
111
222e a m x m x m x a ??+= ???
2
12124
e a m m m a ∴=+
(3)固有频率
22
2132
2
24211
e e k a k a k p m a m a m +==+
2.3解:
平衡位置系统受力如图 则122,2F G F G == 弹簧1k 变形112G x k =
,弹簧变形22
2G
x k =,且m 静位移1222x x x =+ 1212
4422e G G G
x x x k k k ∴
==+=+ ()
12
12,4e e k k k m m k k ∴=
=+
∴固有圆频率()12
1212e e k k k p m k k m
=
=+
2.5解
对数衰减率:111110ln ln 0.06920 2.5
j A j A δ+=
== 相对阻尼系数:2
2
110.01122110.069ζππδ=
=
=????++ ? ?????
衰减系数:9.80.0110.3140.012
n k g n m
s ζωζ
ζ===== 阻尼系数:220.3149 5.652(/)c nm N s m ==??=g
临界阻尼: 5.652
513.8(/)0.011
c c
c N s m ζ
==
=g 2.7解
受力分析如图
-xs ’)
单自由度振动系统振动微分方程
()2022s s
n n n s
mx c x x kx mx cx kx cx x x x x ζωωζω+-+=∴++=∴++=&&&&&&&&&&&&
设iwt
cs x e =,则()c cs x H x ω=
22222()212n n n i i
H i i
ζωωζλωωωζωωλζλ∴=
=-+-+
()H ω=
,相位差角:1
22tan (
)12
ζλπ
?λ-=-
-
()()()()()i iwt i wt s x t H x t H e ae ??ωω--===
(
)0sin )s x a t x t t ωω?=∴=
-Q
X
a =
其中,n ω
λω=
=ζ= 2.8 解:
1、 系统的振动微分方程为:0=??
? ??
-+++?
?
?s x x k kx x c x m
即:s kx kx x c x m =++2&&&
激励函数为:()T t t T
d
k kx s ≤≤=0 傅立叶级数三要素:
kd tdt T d
k T a T ==?002
()0cos 20=?=?dt nwt t T d
k T a T n
()π
n kd dt nwt t T d k T b T n -=?=?sin 20
所以,激励函数的前四项为:
()()()∑=?+?+=41
sin cos 2n n n s t n b t n a a kx ωω
)4sin 4
1
3sin 312sin 21(sin 2wt wt wt wt d k d k
+++-=π 系统稳态响应的前三项为:
]
)
6()91(3)3sin()4()41(2)2sin()2()1()sin([24)2()1(2)sin(42
2
232
22222213
12222ζλλψζλλψζλλψπλζλψ+--+
+--+
+---=+--+=∑=wt wt wt d
d n n k nwt b d x n n n 其中3,2,1,12arctan
2
2=-=n n n n λλ
ζψ
2.9 解:运用杜哈美积分法
())]03.0sin()02.0(sin(50
)03.0cos()02.0cos(5.0[)03.0sin()03.0(sin )(1)03.0sin(03.0)];
01.0sin(50
)01.0cos(5.0[)01.0sin()01.0(sin )50(1)01.0sin(01.0);
01.00(50)(;)(sin )(1sin )(sin )(1sin )/(cos 20001
.00
2
00
01
.00000
00000
0.0p p p p p mp
F p p d p f mp p p x s t p p p mp F p p
d p F F mp
p p
x s t t t F F t f d t p f mp
pt p d t p f mp pt p x pt x t t t ---+=-+==+-+
=
--+
==≤≤-=-+=-+??? ??
+=????υτ
ττυυτττυτττυτττχ时,当时,当
4.1解
直接法
()11121221111221222213222212320()0
()0()0m x k k x k x m x k x k x x m x k x x k x m x k x k k x ++-=?+--=????
?+-+=-++=???
&&&&&&&& 122111223222000k k k m x x k k k m x x +-????????
∴+=????????-+??????
??&&&&
其中,1222
23k k k K k k k +-??=?
?-+??
拉格朗日法
系统为无阻尼自由振动系统,拉格朗日方程形式为:
0i i i
d T T U
dt q q q δδδδδδ??-
+= ???& 广义坐标为:12,x x
22
11221122
T m x m x =+&& 0,1,2i
T
i x δδ== 111111,T d T m x m x x dt x δδδδ??
== ???
&&&&&
222222,T d T m x m x x dt x δδδδ??
== ???
&&&&&
()222
1122132
111222
U k x k x x k x =
+-+ 112212213212
(),()U U k x k x x k x x k x x x δδδδ=--=-+ ∴()11121221111221222213222212320()0()0()0
m x k k x k x m x k x k x x m x k x x k x m x k x k k x ++-=?+--=?????+-+=-++=???&&&&&&&&
影响系数法
令121,0x x ==
11112112k k x k x k k =+=+ 2112212k k k x k ==-=-
令120,1x x ==
22223223k k x k x k k =+=+
12
22
23k k k K k k k +-??
∴=??-+??
4.2解:直接法
∴
11121331111311233
2212123222111222333232331333122233()()0()0()()0()0()()0()0
J k r k r J k r k r k r k r J k r k r J k r k r k r k r J k r k r J k r k r k r k r θθθθθθθθθθθθθθθθθθθθθθθθθθθ??----=++--=??+---=?-++-=????+-+-=--++=??&&&&&&&&&&&& ∴12300100000100
001J M J J J ????
????==?
???
????????
131311223223211121112k r k r
k r k r K k r
k r k r k r kr k r
k r
k r k r +----????
????=-+-=--????
????--+--????
4.3解
a,
1
2
3
4
m
m
M
m
m
??
??
??
=
??
??
??
??
,
122
2233
3344
44
k k k
k k k k
K
k k k k
k k
+-
??
??
-+-
??
=
??
-+-
??
-
??
??
b,
1
2
3
4
m
m
M
m
m
??
??
??
=
??
??
??
??
,
22
2233
3344
44
k k
k k k k
K
k k k k
k k
-
??
??
-+-
??
=
??
-+-
??
-
??
??
c,
1
2
3
4
m
m
M
m
m
??
??
??
=
??
??
??
??
,
122
2233
3344
443
k k k
k k k k
K
k k k k
k k k
+-
??
??
-+-
??
=
??
-+-
??
-+
??
??
4.4解:
质心位于距左端3
4
l处0
3
24
l m xdx ml
l
x l
m
??
+
?
==
?
?
??
?
令1,0
xθ
==
11
2112
2
3
442 k kx kx k
l kl k k kx kx l
=+=
==-=-
令0
x=,1
θ=
22233544448
l l k k k l l kl θ
θ=+= ∴刚度矩阵为,22252
8kl k
K kl kl ?
?
-
??=?
???-????
令1,0x θ==&&&
& 1122m mx m ∴==&&
21120m m ==
令0,1x θ==&&&
& 222524m I ml θ==&&,322244
5()424l
l m l I x dx m ml l -=+=?
∴质量矩阵为,2
20
5024m
M ml ???
?=????
22202205502428kl m
k x x kl
ml kl θθ??
-
??????????∴+=??????????????-?
?????&&&&
特征矩阵为,2
2
222222552824n n n
kl k m H K M kl kl ml ωωω??--??=-=????--????
将2
0n H K M ω=-=整理为,22
422221
4
403
35
n n m l
l km k l ωω-+=
求得特征值为,2
120.735k k m m ω?=≈ ?
,2
22 3.265k k m
m ω?=+≈ ? 2
n H K M ω=-的伴随阵,222
2
558242
222
n n kl kl ml adjH kl k m ωω??
-??=?
??
?
-????
将2
2120.735
, 3.265k k
m m
ωω==代入 得对应特征向量,1211,1.0599.06A A l l ????
????==-????????????
则主振型矩阵为,1
1
1.059
9.06A l l ??
??=-?????
?
模态质量矩阵为
21
111201.059
9.06 1.0599.065024T
T P m
M A MA ml l l l l ??
??
????????==--????????????????
2.2340019.1m
m ??=????
模态刚度矩阵为
21
11122
1.059
9.06 1.0599.06528T
T P kl k K A KA kl kl l l l l ?
?
-
??
????????==??--??????-??????
??
????1.6420062.362k
k ??=????
归一化因子为,i α=
=
∴
归一化因子方阵,0.669
000.229R ?=
?? ∴正则振型矩阵为,
1
1
0.669
0.2290.66901.059
9.060.708 2.07500.229N A AR l
l l l ????
???
??===--???????????????
正则模态质量矩阵为,
2
0.6690.2290.6690.229200.9990.0000.708
2.0750.708 2.07550.000 1.002024T
T
N N N m
M A MA ml l
l l l ??
??
???????===--?
????
????
??????
?
正则模态刚度矩阵为,
20.669
0.2290.669
0.22920.7340.00020.708
2.0750.708 2.07550.000
3.16528T T
N N N kl k
k K A KA kl m kl l l l l ?
?
-
????
??????===?--??????
???-??????
???第一阶主振型示意图,1N 为节点
1
第二阶主振型示意图,2N 为节点
1.265
习题4.6
解:(1)直接法,受力如图
f f k )
r r l ?m ρ?
2
()()0()()0r r f f r r r f f f mz
k z l k z l m k z l l k z l l ??ρ???+++-=???++--=??
&&&& 222
()()0()()0
f r r r f f r r f f r r f f mz k k z k l k l m k l k l z k l k l ?ρ??+++-=????+-++=??&&&& 运动微分方程为
222000f r
r r f f r r f f
r r f f k k k l k l m z z k l k l k l k l m ρ??+-????????
+=????????-+??????
??&&&& 特征矩阵为
22
2222f r r r f f
r r f f r r f f k k m k l k l H K M k l k l k l k l m ωωωρ??+--=-=??-+-????
由20H K M ω=-=
得(
)()
2
4
2
2
2
22
()0f r r r f f f r f r m k k m k
l k l m k k l l ρωρω??-+++++=??
21
ω=2
2ω=
H 的伴随矩阵
2222
2r r f f
f f r r f f r r f r k l k l m k l k l adjH k l k l k k m ωρω??
+--=?
?-+-???
?
将固有频率2
1ω、2
2ω代入adjH ,得主振型:
22(1)(2)1211,f r f r f f r r f f r r k k m k k m A A k l k l k l k l ωω????
????+-+-==????????--????
(2)f f r r k l k l = 则运动微分方程变为
2220000
0f r
r r f f k k m z z k l k l m ρ??+????????
+=????????+??????
??&&&& z
自由度的固有频率为ω=
?
自由度的固有频率为ω=
两运动互不相关 (3)2f r l l ρ=
()(
)2
1,2
2f
r f f r r f f r r
f r
l
l k l k l k l k l ml l ω++±-=
若f f r r k l k l >
()()2212,f r r
f r f
f
r
l l k l l k ml ml ωω++=
=
,(1)(2)111,1f r A A l l ????
????==????--????????
若f f r r k l k l <
()()22
12,f r f
f r r
r
f
l l k l l k ml ml ωω++=
=
,(1)(2)
111,1f r A A l l ????
????==????
--????????
4.9
柔度矩阵 F=1111122123k ??
?
???????
刚度矩阵 K=1
2
101
210
1
1F k --??
????=--????-??
质量矩阵 000000J M J J ????=??????
所以222
362422
32
2025600
n
n
n
n n n n
k J k
H K M k k J k
J J k Jk k k
k J ωωωωωωω--=-=
---=-+-+=--
解得:2(1)2(2)2(3)
0.2
, 1.5, 3.2n
n n k k k J J J
ωωω===
(1)(2)(3)
N
111
1.80.5 1.2
2.240.750.44
111
1.80.5 1.2
2.240.750.44
0.330.740.62
A0.60.370.74
0.740.560.27
P0.5TC
p
A A A
A
??????
??????
??????
===-
??????
??????
-
????????
??
??
∴=-
??
??
-
??
∴
??
??
??
=-
??
??
-
??
=
Q
对应主振型
正则振型矩阵
T
N N
P
Ni
Ni2
Pi Pi
N
0.67
P A P0.11
.5T sin t0.24
9.2600
0 1.810
00 2.63
4.07k00
K K00.75k0
008.97k
P
X
K M
0.6
X
T
P p P
T
p P
J
A MA J
J
A A
ω
ω
????
????
????
∴==-
????
????
-
????
??
??
??
==
??
??
??
??
??
??
==
??
??
??
=
-
∴=
质量模态矩阵 M
刚度模态矩阵
简谐力作用下
2
2
2
2
N N2
2
7
4.07k9.26J
0.11
0.75k1.81J
0.24
8.97k 2.63J
0.009
4.07k9.26J
0.539
X=A X
0.75k1.81J
0.493
8.97k 2.63J
ω
ω
ω
ω
ω
ω
??
??
-
??
??
-
??
-
??
??
-
??
??
-
??
∴
-
??
??
-
??
??
=??
-
??
??
??
??
-
??
物理坐标下位移响应
4.10
2
2
2
2(1)2(2)(1)
(2)P T
P P Pi Pi i i 020220
2113,,A ,A 1111A 11Q 0P P A P Q 2Q X P (1cos t)/n n
n
n
n m k k M K m k
k k m
k H K M k
k m
k k m m ωωωωωωω-????
==??
?
?????-??
??
--∴=-=
=--????∴====????
????-??????
∴=??
??-??????=∴==????
????????
=-Q 对应主振型由杜哈梅积分得
2
P 2P P 0m X 2k Q(1cos t)312mQ X A X (13k 1ω??
??
∴=??-??????∴==-??
????
5.1 解:系统质量刚度矩阵分别为
22,2m k
k m k k k M K m k
k k m k
k -????
????--????==????--???
?-???
?
第一瑞丽商:假设
2
11111121
11112111,0.2;2211111222;
1233123411,0.1234;
22111112221,0.112331
234T
T
T
T A KA k A p A MA m A MA k p A MFMA m k p trD m
??????===??????
??????
??????
??????===????????????==????
??
1则第二瑞丽商:
1系统柔度矩阵 F=k 假设 A 则邓克莱法:m D=FM=
则k
这三种方法中,第二瑞丽商精度最高,邓克莱法计算结果偏小。 5.2解
质量矩阵:212M m ????=??????,刚度矩阵:210121012K k -????=--??
??-??
取振型向量[]0111T
X = 计算一阶固有频率及振型
迭代公式:1k k k DX X α-→(归一化)
动力矩阵:1
1.50.50.51110.50.5 1.5m D K M k -??
??==??????
由此得,2
10.382
m
ω=,[]11 1.2361T
A = 计算第二阶固有频率及振型
迭代公式:1k k k DX X α-→%(归一化)
清型矩阵:(1)
(1)2
1110.55280.08540.44720.17080.27640.17080.44720.08540.5528T
T X X M D D A MA ω--????=-=-????--??
%
由此得,2
2 2.618
m
ω=,[]21 3.23641T A =- 第三阶同理。
给出矩阵迭代法的Matlab 程序如下: function gu_mode2
M=[2 0 0;0 1 0;0 0 2]; %质量矩阵 K=[2 -1 0;-1 2 -1;0 -1 2]; %刚度矩阵
D=K\M; %动力矩阵 for i=1:3 %3阶 i
x0=[1 1 1]'; x1=D*x0; x11=x1/x1(1); n=1;
while norm(x11-x0)>=1.0e-5 %设置精度 if n>18 break; end
n %显示迭代步数 x0=x11 w2=1/x1(1)
x1=D*x0;
x11=x1/x1(1);
x1(1);
n=n+1;
end
n
x11
w2=1/x1(1)
D=D-x11*x11'*M*x1(1)/(x11'*M*x11)
end
5.2
解:矩阵迭代法求系统各阶固有频率和主振型:系统的质量矩阵和刚度矩阵分别为:
四自由度汽车振动影响分析 一、汽车振动问题分析 汽车振动的分析研究是为了提高汽车平顺性,汽车平顺性是指汽车过程中能保证乘员不致因车身振动而引起不舒适和疲乏感觉,以及保持运载货物完整无损的性能。汽车平顺性是影响汽车乘坐舒适性的重要原因,而平顺性的主要就是依靠汽车减振来保证,汽车振动日益成为汽车研发和性能提高的关键所在。 在了解了汽车振动的危害之后,就需要人们研究振动问题,掌握振动机理,消除振动带来的不利影响,利用振动规律指导汽车的研发。汽车振动所要研究的问题主要有路面等级对汽车振动影响、车速对汽车振动影响、悬架参数对汽车振动影响。 二、汽车四自由度系统建模 图2.1四自由度汽车模型 考虑汽车纵向角振动时悬架对车身激振影响就必须至少将汽车振动系统简化为如图所示的一个四自由度平面振动模型。在这个振动模型中,要求车辆相对于纵垂面完全对称,并且左右车轮下的路面不平度完全一样,则认为车辆是在纵垂面上振动。把车身简化为质量为m,绕质心的转动惯量为觉得平面刚体;把前后车轴(包括轮胎)的质量简化为二个质量点m1,m2;前后悬架刚度为左右两侧刚度之和用k1,k2表示,而前后悬架减震器的阻尼系数为左右两侧之和用c1,c2表示:kt1和kt2为轮胎刚度,ct1,ct2为轮胎阻尼,它们也为两侧之和。
为了研究悬架与车身连接点处悬架振动对车身的激励,必须首先列出整个振系的振动微分方程组。为此根据分析动力学中的粘滞阻尼力的拉格朗日方程: . ..Z Z Z Z R U T T dt d ??- =??+??-? ??? ? ????)1.2( 式中:T ——振动系统的总动能; U ——振动系统的总位能; R ——振动系统的总耗散函数; 对四自由度平面振动模型其总动能为: 2.2 22.112.2.2 1 212121z m z m J z m T +++=θ)2.2( 总位能为: 22222111222211)(21 )(21)(21)(21q z k q z k z b z k z a z k U t t -+-+-++--= θθ )3.2( 总耗散能为: 2 .2.222 .1.112...22...1)(21)(21)(21)(21q z c q z c z b z c z a z c R t t -+-+--+--=θθ )4.2( 将三式代入拉格朗日方程求出系统振动的微分方程组整理成矩形式为: . . .. Q C Q K KZ Z C Z M t t +=++)5.2( 其中: ?? ??? ?? ?? ???=2100 0000000000m m J m M ?? ??? ?? ?????+--+--++---+-+=2222 1 111212 2 2121 21212 10 0t t k k b k k k k a k k b k a k b k a k b k a k k k b k a k k k K
2008年振动力学期末考试试题 第一题(20分) 1、在图示振动系统中,已知:重物C 的质量m 1,匀质杆AB 的质量m 2,长为L ,匀质轮O 的质量m 3,弹簧的刚度系数k 。当AB 杆处于水平时为系统的静平衡位置。试采用能量法求系统微振时的固有频率。 解: 系统可以简化成单自由度振动系统,以重物C 的位移y 作为系统的广义坐标,在静平衡位置时 y =0,此时系统的势能为零。 AB 转角:L y /=? 系统动能: m 1动能:2 1121y m T = m 2动能:2222222 22 222)3 1(21))(31(21)31(2121y m L y L m L m J T ====? ω m 3动能:2322 323 33)2 1(21))(21(212 1y m R y R m J T === ω 系统势能: 2 21)21(21)21( y k y g m gy m V + +-= 在理想约束的情况下,系统的主动力为有势力,则系统的机械能守恒,因而有: E y k gy m gy m y m m m V T =+ +-++= +2 212 321) 2 1(2 12 1)2 13 1(2 1 上式求导,得系统的微分方程为: E y m m m k y '=+ + +) 2 131(4321 固有频率和周期为: ) 2 131(43210m m m k + + = ω 2、质量为m 1的匀质圆盘置于粗糙水平面上,轮缘上绕有不可伸长的细绳并通过定滑轮A 连在质量为m 2的物块B 上;轮心C 与刚度系数为k 的水平弹簧相连;不计滑轮A ,绳及弹簧的质量,系统自弹簧原长位置静止释放。试采用能量法求系统的固有频率。 解:系统可以简化成单自由度振动系统,以重物B 的位移x 作为系统的广义坐标,在静平衡位置时 x =0,此时系统的势能为零。 物体B 动能:2 212 1x m T = 轮子与地面接触点为速度瞬心,则轮心速度为x v c 2 1= ,角速度为x R 21=ω,转过的角度为x R 21= θ。轮子动能: )83(21)41)(21(21)4 1( 2 12 1212 122 21212 2 12x m x R R m x m J v m T c =+= + = ω 系统势能: x
《汽车文化汽车文化》》作业作业之之一 序号序号:: 学号学号:: 姓名姓名:: 班级班级:: 1、世界公认的汽车诞生日是: 2、汽车诞生之前,有如下一些先驱者发明过汽车: 3、1895年法国科学院将汽车定名为: 4、汽车发明之初的三种动力装置是: 5、越野车起源于二战时期的: 6、汽车主要由四部分组成: 7、汽车底盘由四部分组成: 8、按等效采用国际标准的GB/T3730.1—2001标准《汽车和挂车类型的术语和定义》,汽车分为两大类: 9、道路交通标志共有七大类: 10、中国汽车工业经历了三个阶段,分别指: 11、目前有较大影响的真正的自主国产小汽车公司主要有4家: 《汽车文化汽车文化》》作业之作业之二二 序号序号:: 学号学号:: 姓名姓名:: 班级班级:: 1、被誉为“汽车之父”的是: 2、汽车设计师之父是: 3、内燃机技术的奠基人是: 4、奥迪汽车公司的创始人: 5、法国标致汽车公司创建人: 6、法国雷诺汽车公司的创始人: 7、劳斯莱斯公司的创始人: 8、雪铁龙汽车公司创始人: 9、汽车大王是指: 10、赛车之父、超级跑车大王是指: 11、电动汽车之父、创造了保时捷跑车、被誉为杰出的汽车设计大师是指: 12、丰田汽车公司的创始人、日本国产车之父是指: 13、日本的福特、日本摩托之父是指: 14、创建通用汽车公司的传奇式人物是:
《汽车文化汽车文化》》作业之作业之三三 序号序号:: 学号学号:: 姓名姓名:: 班级班级:: 1、真正的中国第一车制造者、近代中国机械工业奠基人之一是指: 2、“中国汽车工业的奠基人”、“中国汽车之父”是指: 3、中国被称为“汽车疯子”、“汽车狂人”的是指: 4、汽车发展史上第一种普及到千家万户遍布世界各地的车型是: 5、汽车史上单一车型连续生产超1500万辆、2150万辆、2300万辆的汽车分别是: 6、车界“四大天王”是指: 7、轿车之王、跑车之王、纯种跑车之王、越野车之王分别指: 8、丰田本田日产公司的高端品牌分别是指: 9、写出十大著名跑车: 10、F1速度王是指: 《汽车文化汽车文化》》作业之作业之四四 序号序号:: 学号学号:: 姓名姓名:: 班级班级:: 1、汽车尾气污染物主要指: 2、除汽柴油外,汽车新能源还有: 3、按比赛线路划分汽车运动主要类别有: 4、国际上著名的五大车展: 5、中国有影响的四大车展是: 6、世界著名十大汽车城: 7、今天F1运动中的制造商(车队)共有十个,分别是: 8、F1三大车神是指:
1.汽车系统动力学发展趋势 随着汽车工业的飞速发展,人们对汽车的舒适性、可靠性以及安全性也提出越来越高的要求,这些要求的实现都与汽车系统动力学相关。汽车系统动力学是研究所有与汽车系统运动有关的学科,它涉及的范围较广,除了影响车辆纵向运动及其子系统的动力学响应,还有车辆在垂向和横向两个方面的动力学内容,随着多体动力学的发展及计算机技术的发展,使汽车系统动力学成为汽车CAE技术的重要组成部分,并逐渐朝着与电子和液压控制、有限元分析技术集成的方向发展,主要有三个大的发展方向: (1)车辆主动控制 车辆控制系统的构成都将包括三大组成部分,即控制算法、传感器技术和执行机构的开发。而控制系统的关键,控制律则需要控制理论与车辆动力学的紧密结合。 (2)多体系统动力学 多体系统动力学的基本方法是,首先对一个由不同质量和几何尺寸组成的系统施加一些不同类型的连接元件,从而建立起一个具有合适自由度的模型;然后,软件包会自动产生相应的时域非线性方程,并在给定的系统输入下进行求解。汽车是一个非常庞大的非线性系统,其动力学的分析研究需要依靠多体动力学的辅助。 (3)“人—车—路”闭环系统和主观与客观的评价 采用人—车闭环系统是未来汽车系统动力学研究的趋势。作为驾驶者,人既起着控制器的作用,又是汽车系统品质的最终评价者。假如表达驾驶员驾驶特性的驾驶员模型问题得到解决后,“开环评价”与“闭环评价”的价值差别也许就
不存在了。因此,在人—车闭环系统中的驾驶员模型研究,也是今后汽车系统动力学研究的难题和挑战之一。除驾驶员模型的不确定因素外,就车辆本身的一些动力学问题也未必能完全通过建模来解决。目前,人们对车辆性能的客观测量和主观之间的复杂关系还缺乏了解,而车辆的最终用户是人。因此,对车辆系统动力学研究者而言,今后一个重要的研究领域可能会是对主观评价与客观评价关系的认识 2.目前汽车系统动力学的研究现状 汽车系统动力学研究内容范围很广,包括车辆纵向运动及其子系统的动力学响应,还有车辆垂向和横向动力学内容。及行驶动力学和操纵动力学。行驶动力学研究路面不平激励,悬架和轮胎垂向力引起的车身跳动和俯仰运动;操纵动力学研究车辆的操纵稳定性,主要是轮胎侧向力有关,引起的车辆侧滑、横摆、和侧倾运动。汽车系统动力学的研究可以分为三个阶段: 阶段一(20世纪30年代) ①对车辆动态性能的经验性的观察 ②开始注意到车轮摆振的问题 ③认识到车辆舒适性是车辆性能的一个重要方面 阶段二(30年代—50年代) ①了解了简单的轮胎力学,给出了轮胎侧偏角的定义 ②定义不足转向和过度转向 ③建立了简单的两自由度操纵动力学方程
车辆悬架系统振动研究概述 关键词:振动悬架 摘要: 本文简单介绍了车辆振动的相关知识,对其做了简明的分析,由于篇幅有限故只重点介绍了与车辆悬架相关的知识。根据不同结构悬架的特点,分别介绍与其相关的振动研究内容和成果。 引言 悬架系统是提高车辆平顺性(乘座舒适性)和安全性(操纵稳定性)、减少动载荷引起零部件损坏的关键,。自70年代以来,工业发达国家开始研究基于振动主动控制的主动/半主动悬架系统。引入主动控制技术后的悬架是一类复杂的非线性机、电、液动力系统,其研究进展和开发应用与机械动力学、流体传动与控制、测控技术、计算机技术、电子技术、材料科学等多个学科的发展紧密相关。为此,关于车辆悬架系统振动的研究比较困难,但是其又具有十分重要的实际意义。一、车辆悬架系统简介 悬架系统的作用主要是连接车桥和车架,传递二者之间的作用力和力矩以及抑制并减少由于路面不平而引起的振动,保持车身和车轮之间正确的运动关系,保证汽车的行驶平顺性和操纵稳定性。 悬架系统一般由弹性元件、减振器和导向装置等组成。其中,弹性元件的作用是承受和传递垂直载荷,缓冲并抑制不平路面所引起的冲击。按弹性元件分类包括钢板弹簧悬架、螺旋弹簧悬架、扭杆弹簧悬架以及气体弹簧悬架。钢板弹簧是1根由若干片等宽但不等长的合金弹簧片组合而成的近似等强度的弹性梁,多数情况下由多片弹簧组成。多片式钢板弹簧可以同时起到缓冲、减振、导向和传力的作用,可以不装减振器而用于货车后悬架。螺旋弹簧用弹簧钢棒料卷制而成,常用于各种独立悬架。其特点是没有减振和导向功能,只能承受垂直载荷。扭杆弹簧本身是1根由弹簧钢制成的杆,一端固定在车架上,另一端固定在悬架的摆臂上。气体弹簧是在1个密封的容器中冲入压缩气体,利用气体可压缩性实现弹簧的作用。气体弹簧具有理想的变刚度特性。气体弹簧有空气弹簧和油气弹簧2种。
作业2 一、判断题(每题1分,共计20分)(对打“√”,错打“ ”) (1)甲克虫型汽车和鱼型汽车都属于流线型汽车。() (2)楔型汽车主要是用来解决甲克虫型汽车的横风跑偏问题。() (3)从安全的角度考虑,汽车色彩最好选择黄色、红色或白色。() (4)福特汽车公司的高档轿车是水星品牌。() (5)吉普(Jeep)品牌汽车是由克莱斯勒道奇分部生产的。() (6)保时捷车标是以公司所在地斯图加特市徽为主设计而成的。() (7)莲花汽车公司是英国生产微型轿车的公司。() (8)法拉利汽车公司只生产高档跑车和赛车。() (9)丰田汽车公司是日本最大的汽车公司,也是世界最大的汽车公司。() (10)韩国最早生产汽车的公司是起亚汽车公司。() (11)吉利控股集团有限公司是中国第一家民营汽车公司。() (12)梅斯德斯(Mercedes)是德国宝马汽车公司的汽车品牌。() (13)费迪南德·波尔舍既是大众汽车公司的创始人,也是保时捷汽车公司的创始人。() (14)雷诺汽车公司是法国第一大汽车公司。() (15)菲亚特汽车公司是意大利最早、也是最大的汽车公司。() (16)“FIAT”是“意大利都灵汽车制造厂”的缩写。() (17)通用汽车公司高档轿车是凯迪拉克品牌,凯迪拉克是一个城市的名称。()(18)丰田汽车公司豪华轿车品牌采用皇冠车标。() (19)罗孚汽车公司是英国最早设计制造汽车的公司。() (20)本田汽车公司既生产汽车,又生产摩托车。()
二、填空题(每空1分,共计30分) 1.确定汽车外形有三个基本要素,即、和。2.汽车外形经历了型、型、型、型、型、型和型等的演变和发展。 3.克莱斯勒汽车公司拥有、、、 等汽车品牌。 4.福特汽车公司拥有和两个汽车分部及相关品牌。5.通用汽车公司拥有、、、 、、等汽车分部及品牌。 6.奥迪车标四个连环的标志,表示、、和四家公司组成联合汽车公司。 7.戴-克汽车公司是在年,由和两个汽车公司合并成立。 8.宾利车标志展翅翱翔雄鹰中的字母“B”代表。 三、选择题(每题1分,共计30分) 1.大众车标是由()两个字母组成的。 a)O和W b)O和V c)V和V d)V和W 2.()被尊称为“汽车设计大师”。 a)波尔舍 b)本茨 c)福特 d)迈巴赫 3.标致汽车公司的车标是一只()。 a)雄狮 b)公牛 c)捷豹 d)跃马 4.英国最老的汽车品牌是()。 a) 宾利 b) 美洲虎 c) 莲花 d) 罗孚 5.下列汽车品牌中,不属于菲亚特汽车公司的是()。 a)法拉利 b)兰博基尼 c)阿尔法.罗密欧 d)蓝旗亚 6.通用汽车公司的创始人是()。 a) 杜兰特 b) 斯隆 c) 雪佛兰 d)奥兹 7.兰博基尼汽车公司的车标是一只()。 a)雄狮 b)公牛 c)捷豹 d)跃马
关于汽车的振动的分析 汽车振动系统是由多个子系统组成的具有质量、弹簧和阻尼的复杂的振动系统。汽车振动源主要有:路面和非路面对悬架的作用、发动机运动件的不平衡旋转和往复运动、曲轴的变动气体负荷、气门组惯性力和弹性力、变速器啮合齿轮副的负荷作用、传动轴等速万向节的变动力矩等。 在汽车工程中,多数振动是连续扰动力,而其他一些则是汽车承受的冲击力和短时间的瞬态振动力。振动又可分为周期性的和随机性的,发动机旋转质量的不平衡转动是周期振动的典型例子,而随机振动主要是由路面不平引起的。所有质量--弹性系统都有自己的固有频率,如果作用于系统的干扰频率接近振动系统的固有频率,就会发生共振现象。因此即使自身具有抗干扰能力的系统,装配到汽车上时仍有可能产生振动问题,这就要求在设计阶段准确建立系统模型及运动方程,分析自由振动特性和受迫振动响应,研究控制振动的方法。 汽车振动按照频率范围可分为: 1、影响行驶平顺性的低频振动:它产生的主要振源由于路面不平度激励使得汽车非悬挂质量共振和发动机低频刚体振动,从而引起悬架上过大的振动和人体座椅系统的共振造成人体的不舒适,其敏感频率主要在1-8Hz(最新的研究表明:当考虑人体不同方向的响应时可到16Hz)。对于乘员其评价指标一般是:针对载货汽车的疲劳降低工效界限和针对乘用汽车的疲劳降低舒适界限,或直接采用人体加权加速度均方根值进行评价;对于货物其评价指标是:车箱典型部位的均方根加速度。由于该指标于人体生理主观反映密切相关,因此试验和评价往往采用测试和主观评价相结
合。 2、车身结构振动和低频噪声:大的车身结构振动,不仅引起自身结构的疲劳损坏,而且更是车内低频结构辐射噪声源。其频率主要分布在20—80Hz 的频带内。由两方面引起:(1)激励源;主要有:道路激励、动力传动系统尤其是动力不平衡和燃烧所产生的各阶激励、空气动力激励;(2)车身结构和主要激励源系统的结构动力特性匹配不合理引起的路径传递放大。当前对于低频结构振动和噪声分析研究的方法有:计算预测分析,(1)基于有限元方法通过建立结构动力学模型取得结构固有振动模态参数对结构动力学特性进行评价,通过试验载荷分析得到振动激励并结合结构动力学模型计算振动响应;(2)基于有限元和边界元的系统声学特性计算和声响应计算。试验分析:(1)各种结构振动和声学系统的导纳测量和模态分析;(2)基于实际运行响应的工作振型分析;(3)基于机械和声学导纳测量的声学寄予率分析; 3、各种操纵机构的振动:操纵机构的振动主要是因为其安装吊挂刚度偏低或自身结构动力特性不当或车身振动过大而产生,它不仅容易使驾驶者疲劳严重时可能使操纵失控。对于这些振动各企业都有相应得评价和限值规定。最为典型的是方向盘(线性)振动(转向管柱振动),其产生的主要原因是方向盘及管柱安装总成与车身振动或其它激励源发生共振;另一重要的振动现象是行驶过程中的方向盘旋转振动(即:方向盘及转向轮摆振)。其产生的原因是:行驶过程中转向轮的跳动与自身的转动而产生的陀螺效应引起转向轮的波动并被转向结构放大从而引起方向盘旋转振动。 4、空气声:车内空气声是由于隔声吸声措施不当从而使得动力传动
汽车系统动力学的发展和现状 摘要:近年来,随着汽车工业的飞速发展,人们对汽车的舒适性、可靠性以及安全性也提出越来越高的要求,这些要求的实现都与汽车系统动力学相关。汽车系统动力学是研究所有与汽车系统运动有关的学科,它涉及的范围较广,除了影响车辆纵向运动及其子系统的动力学响应,还有车辆在垂向和横向两个方面的动力学内容。本文通过对汽车系统动力学的的介绍,对这一新兴学科的发展和现状做一阐述。 关键字:汽车系统动力学动力学响应发展历史 Summary:In recent years, with the rapid development of automobile industry, people on the vehicle comfort, reliability and safety are also put forward higher requirements, to achieve these requirements are related to vehicle system dynamics.Vehicle system dynamics is the study of all related to the movement of the car system discipline, it involves the scope is broad, in addition to the effects of dynamic response of vehicle longitudinal motion and its subsystems, and vehicles to and dynamic content crosswise two aspects in the vertical.Based on the vehicle system dynamics is introduced, the development and status of this emerging discipline to do elaborate. Keywords:Dynamics of vehicle system dynamics Dynamic response Development history 0 引言 车辆动力学是近代发展起来的一门新兴学科。有关车辆行驶振动分析的理论研究,最早可以追溯到100年前。事实上,知道20世纪20年代,人们对车辆行驶中的振动问题才开始有初步的了解;到20世纪30年代,英国的Lanchester、美国的Olley、法国的Broulhiet开始了车辆独立悬架的研究,并对转向运动学和悬架运动学对车辆性能的影响进行了分析。开始出现有关转向、稳定性、悬架方面的文章。同时,人们对轮胎侧向动力学的重要性也开始有所认识。 在随后的20年中,车辆动力学的进展甚微。进入20世纪50年代,可谓进入了一个车辆操纵动力学发展的“黄金时期”。这期间建立了较为完整的车辆操纵动力学线性域(即侧向加速度约小于0.3g)理论体系。随后有关行驶动力学的进一步发展,是在完善的测量和计算手段出现后才得以实现。人们对车辆动力学理解的进程中,理论和试验两方面因素均发挥了作用。随后的几十年,汽车制造商意识到行驶平顺性和操纵稳定性在汽车产品竞争中的重要作用,因而车辆动力学得以迅速发展。计算机及应用软件的开发,使建模的复杂程度不断提高。在过去的70多年中,车辆动力学在理论和实际应用方面也都取得了很多成就。在新车型的设计开发中,汽车制造商不仅依靠功能强大的计算机软件,更重要的是具有丰富测试经验和高超主观评价技能的工程师队伍。 传统的车辆动力学研究都是针对被动元件的设计而言,而采用主动控制来改变车辆动态性能的理念,则为车辆动力学开辟了一个崭新的研究领域。在车辆系统动力学研究中,采用“人—车—路”大闭环的概念应该是未来的发展趋势。作为驾驶者,人既起着控
《车辆振动与噪声控制》课程教学大纲 课程代码:020242025 课程英文名称:Control of Vehicle Vibration and Noise 课程总学时:32 讲课:26 实验:6 上机:0 适用专业:车辆工程装甲车辆工程能源与动力工程交通运输 大纲编写(修订)时间:2017.5 一、大纲使用说明 (一)课程的地位及教学目标 车辆振动与噪声控制是车辆工程专业、装甲车辆工程、能源与动力工程和交通运输专业的专业选修课。面对激烈竞争的汽车市场,除了提高汽车的各项性能指标和经济指标外,降低汽车振动与噪声,提高汽车运行舒适度已成为现代汽车设计及新技术开发研究的一个重要方面。本课程的主要任务是使学生了解并掌握汽车振动的基本要素;单自由度、二自由度及多自由度振动的基本特性;随机振动的统计特性及汽车的平顺性分析。通过本课程的学习,能培养学生对工程实际问题观察、分析及解决的能力,为从事专业设计与研究打下坚实的基础。 (二)知识、能力及技能方面的基本要求 通过本课程的学习,学生要对本课的基本内容有系统的理解,掌握其基本概念、理论和方法,运用这些理论分析,解决工程实际问题,并达到如下要求: 1.具有建立典型汽车结构力学模型的能力,并能够确定其边界条件和初始条件。 2.掌握模型系统的模态分析与响应分析方法。 (三)实施说明 教师在授课过程中可以根据实际情况酌情安排各部分的学时,课时分配表仅供参考。教师要注重对基本概念、基本方法和解题思路的讲解,以便学生在实际应用中能举一反三,灵活运用。根据专业特点,教师应结合实际问题,在教学过程中注意理论与实际结合,突出实际应用。 (四)对先修课的要求 本课程的先修课程有《高等数学》等相关课程。 (五)对习题课、实验环节的要求 结合有关章节中的重点和难点问题以及典型的问题,安排一定的习题练习,并以讲、练、讨论相结合的方式进行。引导学生对所学内容的基本概念、基本原理和基本方法有更加深入的了解。结合每次课的内容、重点和难点,有针对性的布置与有关实际问题相联系的思考题。 (六)课程考核方式 1.考核方式:考查。 2.考核目标:考核学生对单自由度及多自由度振动基本原理掌握情况,在此基础上掌握模态分析的基本理论。通过对汽车模型的简化,在一定路面激励下,分析汽车的平顺性。 3.成绩构成:本课程的总成绩主要由两部分组成:平时成绩占10%,实验成绩占10%,考试成绩占80%。 平时成绩由任课教师视具体情况按百分制给出。 (七)主要参考书目:
《汽车文化》作业之一(填空题) 1、世界公认的汽车诞生日是1886年1月29日。 2、汽车诞生之前,有如下一些先驱者发明过汽车:瑞士人普兰捷尔、法国人尼古拉斯?古诺、法国人列诺尔、法国人艾蒂安.勒努瓦、德国人卡尔·本茨、德国人戈特利布.戴姆勒。 3、1895年法国科学院将汽车定名为“Automobile”。 4、汽车发明之初的三种动力装置是蒸汽机、电动机、汽油内燃机。 5、越野车起源于二战时期的吉普车。 6、汽车主要由发动机、底盘、车身、电气设备四部分组成。 7、汽车底盘由传动系、行驶系、转向系、制动系四部分组成。 8、按等效采用国际标准的GB/T3730.1—2001标准《汽车和挂车类型的术语和定义》,汽车分为商 用车和乘用车两大类。 9、道路交通标志共有警告标志、禁令标志、指示标志、指路标志、旅游区标志、道路施工标志、辅 助标志七大类。 10、中国汽车工业经历了三个阶段,分别指:建国初期25年---初创(1953~1977)、改革开放后15 年---恢复与发展(1978~1993)、新的发展时期---飞跃发展(1994~) 11、目前有较大影响的真正的自主国产小汽车公司主要有奇瑞、吉利、中华、比亚迪等4家。 12、卡尔-本茨、戈特里布-戴姆勒被誉为“汽车之父”。 13、汽车设计师之父---威廉.迈巴赫。 14、内燃机技术的奠基人是德国工程师:尼科劳斯.奥古斯特.奥托。 15、奥迪汽车公司的创始人:奥古斯特.霍奇 16、法国标致汽车公司创建人:阿曼.标致 17、法国雷诺汽车公司的创始人:路易斯.雷诺 18、劳斯莱斯公司的创始人:查尔斯·罗尔斯与亨利·罗伊斯 19、汽车大王指美国的享利-福特。 20、雪铁龙汽车公司创始人-安德烈·雪铁龙 21、赛车之父、超级跑车大王是指恩佐-法拉利。 22、电动汽车之父、创造了保时捷跑车、被誉为杰出的汽车设计大师:费迪南德.波尔舍。 23、丰田汽车公司的创始人、日本国产车之父是指丰田喜一郎。(日本大批量汽车生产之父) 25、日本摩托之父是指本田宗一郎。(日本的福特) 25、创建通用汽车公司的传奇式人物是威廉-杜兰特。 《汽车文化》作业之二(填空题) 1、真正的中国第一车制造者、近代中国机械工业奠基人之一是指支秉渊。 2、官方代表“中国汽车工业的奠基人”、“中国汽车工业之父”是指:饶斌。 3、中国被称为“汽车疯子”、“汽车狂人”的民营汽车制造企业家是指吉利公司的李书福。 4、汽车发展史上第一种普及到千家万户遍布世界各地的车型是福特T型车。 5、汽车史上单一车型连续生产超1500万辆、2150万辆、2300万辆的汽车分别是福特T型车、大众 甲壳虫、大众高尔夫。 6、车界“四大天王”是指:劳斯莱斯、宾利、迈巴赫、霍奇。 7、轿车之王、跑车之王、纯种跑车之王、越野车之王分别指:劳斯莱斯、法拉利、保时捷、路虎。 8、丰田、本田、日产公司的高端品牌是指雷克萨斯(凌志),-讴歌(阿库拉),英菲尼迪 9、著名跑车品牌有:法拉利、阿尔法-罗密欧、布加迪、玛莎拉蒂、兰博基尼、保时捷、莲花、世 爵、科尔维特、野马、帕加尼、柯尼赛格、阿波罗、SSC、Zenvo。 10、F1速度王——迈克尔·舒马赫 11、汽车尾气污染物主要指:CO、氮氧化合物、碳氢化合物、铅化物、碳烟等颗粒物。 12、除汽柴油外,汽车新能源还有:燃料电池、甲醇(乙醇)、二甲醚、天然气、液化石油气(LPG)、 太阳能、氢气、电动。 13、按比赛线路划分汽车运动主要类别有:长距离比赛(拉力赛、越野赛)、环形场地赛(方程式汽车
作业题 1、车辆动力学的具体内容是研究车辆及其主要零部件在各种运用情况下,特别是在高速运行时的位移、加速度和由此而产生的动作用力。 2、车辆系统动力学目的在于解决下列主要问题: ①确定车辆在线路上安全运行的条件; ②研究车辆悬挂装置和牵引缓冲装置的结构、参数和性能对振动及 动载荷传递的影响,并为这些装置提供设计依据,以保证车辆高速、安全和平稳地运行; ③确定动载荷的特征,为计算车辆动作用力提供依据。 3、铁路车辆在线路上运行时,构成一个极其复杂的具有多自由度的振动系统。 4、动力学性能归根结底都是车辆运行过程中的振动性能。 5、线路不平顺不是一个确定量,它因时因地而有不同值,它的变化规律是随机的,具有统计规律,因而称为随机不平顺。 (1)水平不平顺; (2)轨距不平顺; (3)高低不平顺; (4)方向不平顺。 6、车轮半径越大、踏面斜度越小,蛇行运动的波长越长,即蛇行运动越平缓。 7、自由振动的振幅,振幅大小取决于车辆振动的初始条件:初始位移和初始速度(振动频率)。
8、转向架设计中,往往把车辆悬挂的静挠度大小作为一项重要技术指标。 9、具有变摩擦减振器的车辆,当振动停止时车体的停止位置不是一个点,而是一个停滞区。 10、在无阻尼的情况下共振时振幅随着时间增加,共振时间越长,车辆的振幅也越来越大,一直到弹簧全压缩和产生刚性冲击。 11、出现共振时的车辆运行速度称为共振临界速度 12、在车辆设计时一定要尽可能避免激振频率与自振频率接近,避免出现共振。 13、弹簧簧条之间要留较大的间距以避免在振动过程中簧条接触而出现刚性冲击 14、两线完全重叠时,摩擦阻力功与激振力功在任何振幅条件下均相等。 15、在机车车辆动力学研究中,把车体、转向架构架(侧架)、轮对等基本部件近似地视为刚性体,只有在研究车辆各部件的结构弹性振动时,才把他们视为弹性体。 16、簧上质量:车辆支持在弹性元件上的零部件,车体(包括载重)及摇枕质量 17、簧下质量:车辆中与钢轨直接刚性接触的质量,如轮对、轴箱装置和侧架,客车转向架构架,一般是簧上质量。 18、一般车辆(结构对称)的垂向振动与横向振动之间是弱耦合,因此车辆的垂向和横向两类振动可以分别研究。 19、若车体质心处于纵垂对称面上,但不处于车体的横垂对称面上,则车体的浮沉振动将和车体的点头振动耦合起来。
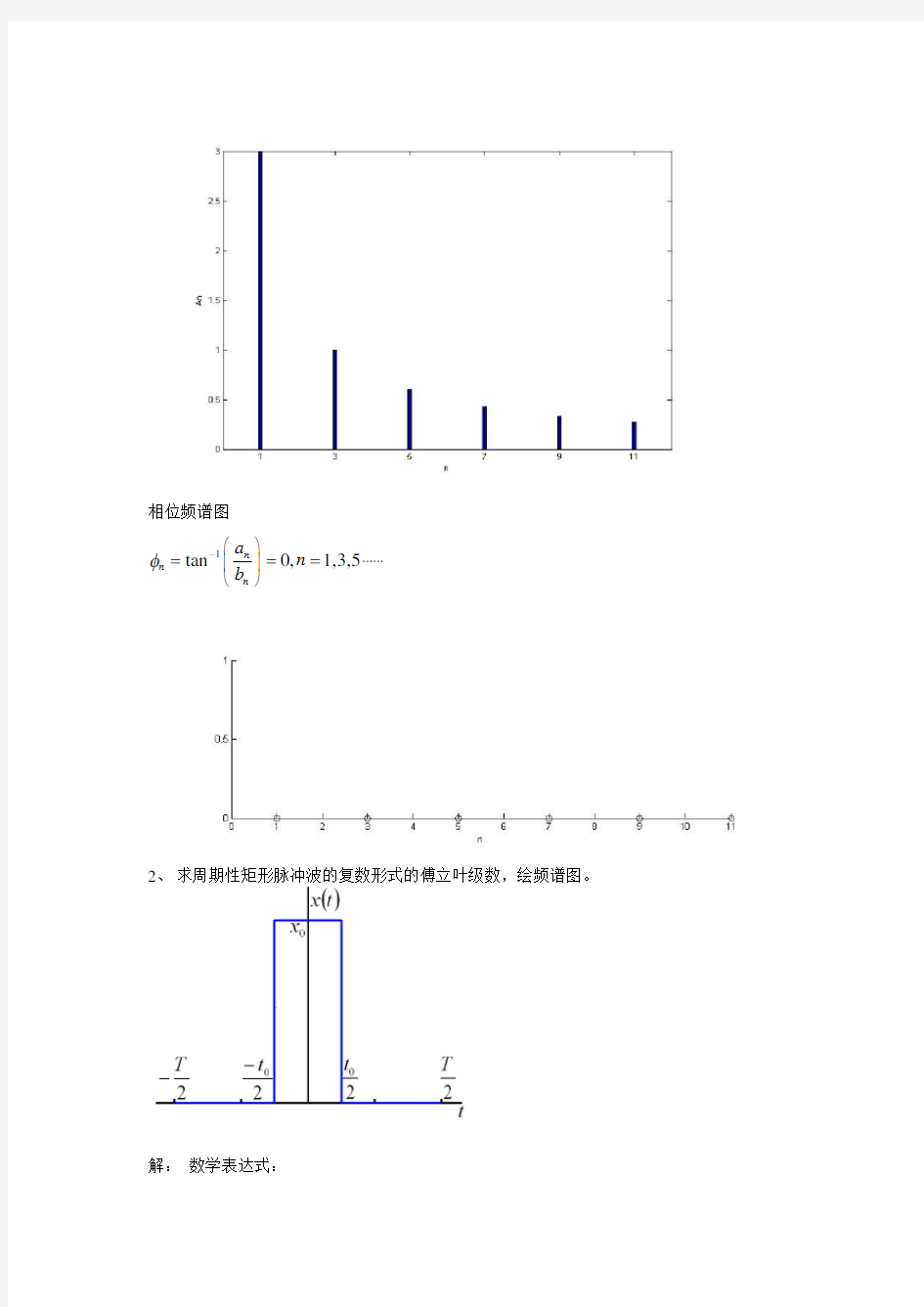
1、 方波振动信号的谐波分析,00,02 (),2 T x t x t T x t T ? <
相位频谱图 1tan 0,1,3,5 n n n a n b φ -?? ===?????? ??? 2、 求周期性矩形脉冲波的复数形式的傅立叶级数,绘频谱图。 解: 数学表达式:
计算三要素: 傅立叶级数复数形式: 频谱图 00 00,0sin ,0,n x t n T A x n t n n n T ππ?=??=? ?≠-∞<<∞?? ()???? ?????≤≤≤≤--≤≤-=2 202222000 00 T t t t t t x t t T t x 偶函数 T x t a 0002=2sin 2010t n n x a n ωπ?=0 =n b 2 sin 22010t n n x a ib a X n n n n ωπ?==-=()2sin 1101012/2/02/2/102/2 /02/2/010********t n n x t in e e T x t in e T x dt e x T dt e t x T X t in t in t t t in t in t t t in T T n ωπωωωωωωω?=--?=-?=??=??=-------? ?T t x t n n x X n 0 0010002sin lim =?=→ωπ()∑ ∑ ∞-∞=∞-∞===n t in n t in n e n t n x e X t x 112sin 0 10ωωωπ
汽车振动学复习题 一、填空题 1、不同情况进行分类,振动系统大致可分成(线性振动)和非线性振动;确定振动和(不确定振动);(自由振动)和强迫振动;周期振动和(非周期振动);(连续系统)和离散系统。 2、在离散系统中,弹性元件储存(势能),惯性元件储存(动能),(阻尼)元件耗散能量。 3、周期运动的最简单形式是(简谐振动),它是时间的单一(正弦)或(余弦)函数。 4、叠加原理是分析(线性系统)的振动性质的基础。 5、叠加原理在( 线性振动系统 )中成立,在一定的条件下,可以用线性关系近似( 非线性关系 )。 6、系统的固有频率是系统(本身)的频率,它只与系统的(刚度)和(质量)有关,与系统受到的激励无关。 7、周期运动可以用( 简谐函数 )的( 级数 )形式表示。 8、根据系统、激励与响应的关系,常见的振动问题,可以分为( 振动设计 )、( 系统识别 )和( 环境预测 )三类基本课题。 二、简答题 1、简述振动系统的实际阻尼、临界阻尼、阻尼比的联系与区别。 答:实际阻尼是指振动系统的真实阻尼值,用于度量系统自身消耗振动能量的能力;临界阻尼是概念阻尼,是指一个特定的阻尼值,大于或等于该阻尼值,系统的运动不是振动,而是一个指数衰运动;阻尼比等于实际阻尼与临界阻尼之比。
2、在分析振动系统时,为什么要进行线性化处理?线性化的方法有哪些? 答:P2 3、多自由度系统振动的振型指的是什么? 机械系统某一给定振动模态的振型,指在某一固有频率下,由中性面或中性轴上的点偏离其平衡位置的最大位移值所描述的图形。 4、简述线性多自由度系统动力响应分析方法。 多自由度系统在外部激励作用下的响应分析称为动力响应分析;常用的动力响应分析方法有振型叠加法和变换方法(傅里叶变换或拉普拉斯变换);当系统的质量矩阵、阻尼矩阵、刚度矩阵可以同时对角化的时候,可以把系统的运动微分方程解藕,得到一组彼此独立的单自由度运动微分方程,求出这些单自由度运动微分方程的解后,采用振型叠加,即可得到系统的动力响应;傅里叶变换或拉普拉斯变换就是对各向量做傅里叶变换和拉普拉斯变换,得到的系统的频响函数矩阵或传递函数矩阵,然后进行傅里叶逆变换或拉普拉斯逆变换得到系统的响应。 5、机械振动系统的固有频率与哪些因素有关?关系如何? 答:机械振动系统的固有频率和系统的质量矩阵、刚度矩阵和阻尼有关。质量越大,固有频率越低;刚度越大,固有频率越高;阻尼越大,固有频率越低。 6、什么是隔声过程的“吻合效应”?它和隔声中的结构共振有何不同? 7、阻性消声器与抗性消声器的本质区别是什么?在使用时要注意什么问题? 8、何为车轮的陀螺效应?对前轮摆振有何影响? 9、简析影响汽车平顺性的结构因素。 P178:题6.2、题6.3 P189:题7.1、题7.4 P216:题8.1、题8.5
1、汽车由哪几个部分组成?各大部件的作用是什么? 汽车有四大组成部分,还有“两大机构”、“五大系统”: ①四大组成部分:发动机、底盘、车身、电气设备。 ②两大机构: 1 曲柄连杆机构,由曲轴和连杆组成,作用是把混合气的能量转换成机械能实现传递; 2 配气机构,作用是根据汽车所需的实际情况,调节进去汽缸内的混合气。 ③五大系统: 1 起动系,主要由启动机组成,连接发动机飞轮; 2 冷却系,主要由水泵、水箱及冷却管道组成,作用是使冷却水循环,不致使发动机温度过高而损坏; 3 润滑系,主要是发动机油底壳、机油滤清器、集滤器组成,主要作用是将机油过滤润滑发动机曲轴、连杆、活塞等,不至于摩擦过热而烧坏发动机;同时降低摩擦增强损耗; 4 点火系,主要由高压线圈、火花塞组成,作用是将蓄电池低压电流转换成高压电,然后使火花塞触点打火点燃混合气;(对汽油车而言是这样,柴油车没点火系,是靠压缩柴油的) 5 供给系,主要由油箱、油管、管道、化油器(电喷车没有化油器)组成,作用就是供给燃油。 2、车辆识别代号(VIN)有几位?其意义和作用怎样? 现在世界各国汽车公司生产的汽车大部分都使用了VIN(Vehicle Identification Number)车辆识别代号编码。“VIN车辆识别代号编码”由一组字母和阿拉伯数字组成,共17位,又称17位识别代号编码。它是识别一辆汽车不可缺少的工具。 VIN的每位代码代表着汽车的某一方面信息参数。按照识别代号编码顺序,从VIN中可以识别出该车的生产国家、制造公司或生产厂家、车辆类型、品牌名称、车型系列、车身型式、发动机型号、车型年款(属哪年生产的年款型车)、安全防护装置型号、检验数字、装配工厂名称和出厂顺序号码等等。 17位代号编码经过排列组合的结果可以使车型生产在30年之内不会发生重号现象,就像我们的身份证号码一样,不会产生重号错认,故又称为“汽车身份证”。因为现在生产的汽车车型采用年限在逐渐缩短,一般8~12年就淘汰,不再生产,所以17位识别代号编码已足够应用。 各国政府及各汽车公司对本国或本公司生产的汽车的17位识别代号编码都有具体规定。各国的技术法规一般只规定车辆识别代号的基本要求,如其应由17位代号编码组成,字母和数字的尺寸、书写形式、排列位置和安装位置都有相应规定等,并且应保证30年内不会重号,除对个别符号的含义有硬性规定外,其他不作硬性规定,而由生产厂家自行规定其代表的含义。各国有关车辆识别代号
汽车振动系统的分析研究* 左万里苏小平田海兰 (南京工业大学机械与动力工程学院,南京210009) Research of the vehicle vibration system ZUO Wan-li ,SU Xiao-ping ,TIAN Hai-lan (School of Mechanical and Power Engineering ,Nanjing University of Technology ,Nanjing 210009,China ) 文章编号:1001-3997(2011)02-0112-02 【摘要】建立前轮为独立悬架,后轮为非独立悬架汽车的七自由度动力学模型,并给出该模型所 需要的质量特性与运动学特性参数。由给出的运动微分方程, 利用仿真分析得出车身的振动加速度图。研究结果表明,建立的汽车振动系统动力学模型是有合理的。 关键词:汽车;系统动力学;数学模型 【Abstract 】A seven-degrees-of-freedom dynamic model of the car which front wheel with indepen -dent suspension and rear wheel with dependent suspension is presented,then the mss parameters and move -ment characteristics parameters that the model need is given.According to the differential equations of mo -tion ,the vibration acceleration diagram of vehicle body is obtained via simulation analysis.The results showed that the dynamic model of vehicle vibration system is reasonable. Key words :Vehicle ;System dynamics ;Mathematic model 中图分类号:TH16文献标识码:A *来稿日期:2010-04-02*基金项目:江苏省高技术研究重点实验室项目BM2007201 1引言 振动是现代汽车面临的一个重要问题,随着汽车速度和人们对生活要求的不断提高,人们对降低汽振动的要求也越来越高。了解掌握汽车动态特性及其结构参数之间的关系,是对汽车进行减振优化设计的前提。为此,对某一带有非独立悬的中型客车,进行了一些研究。 以某中型客车为原型,其前悬为双横臂独立悬架,后悬为板簧悬架。假设车身是一个刚体,当车辆在不平路面做匀速直线运动时,车身具有上下跳动,俯仰,侧倾3个自由度,两个前轮分别具有垂向运动的自由度,后轴具有垂向跳动和侧倾转运2个自由度,计系统共有七个自由度。 2系统的运动方程 带非独立悬架的七自由度整车模型示意图,如图1所示。 a B f y K fr C fr x ufr x fr x x rfr K tfr φ θ z m fr x rl x ufl x rfl K tfl m fl C fl K fl K rl x url x rl C rl x rrl m rl K trl B r K rr x rr b C rr x urr x rrr m rr K trr x ur γ 图1汽车振动系统简化模型 图中:K fl 、K fr 、K rl 、K rr —前后悬加的刚度系数;C fl 、C fr 、C rl 、C rr —前后悬 架的阻尼系数;m fl 、m fr 、m rl 、m rr —前后悬架的簧下质量;K tfl 、K tfr 、K trl 、K trr —四个轮胎的垂直刚度。考虑到汽车的左右对称性,假定K fl =K fr =K f ,K rl =K rr =K r ;C fl =C fr =C f ,C rl =C rr =C r ;m fl =m fr =m f , m rl =m rr =m r ,K tfl =K tfr =K trl =K trr =K t 。m s —车身质量;a 、b —车身质心到前轴和后轴的距离;B f —前轴轮距;B r —后轴轮距;x —车身质心的垂直位移, θ—车身的俯仰角位移;φ—车身的侧倾角位移。x ufl 、x ufr 、x url 、x urr —前后悬架簧下质量的垂直位移;x fl 、x fr 、x rl 、x rr —前后悬架簧上质量的垂直位移;x ur —后桥质心的垂直位移; γ—后桥质心的倾角位移[1]。在俯仰角θ和侧倾角φ较小时,车身四个端点处的垂向位移有如下关系:x fl =x-a θ-1B f φ(1) x fr =x-a θ+12 B f φ(2) x rl =x+b θ-12 B r φ(3) x rr =x+b θ+1B r φ(4) 后桥质心回转运动与垂直位移方程为:γ=X url -X urr (5) X ur =X url +X urr 2 (6) 因此,车身质心处的垂向运动方程为: m s x 咬=C f x 觶fl -x 觶ufl r r +K f x fl -x ufl r r +C f x 觶fr -x 觶ufr r r +K f x fr -x ufr r r +C r x 觶rl -x 觶url r r +K r x rl -x url r r +C r x 觶rr -x 觶urr r r +K r x rr -x urr r r (7) 车身俯仰运动方程为: I zz θ咬=C r x 觶rl -x 觶url r r +K r x rl -x url r r +C r x 觶rr -x 觶urr r r +K r x rr -x urr r r r r b-a C f x 觶fl -x 觶ufl r r +K f x fl -x ufl r r +C f x 觶fr -x 觶ufr r r +K f x fr -x ufr r r r r (8)车身侧倾运动方程: I yy φ咬=C f x 觶fr -x 觶ufr r r +K f x fr -x ufr r r +C f x 觶fl -x 觶ufl r r +K f x fl -x ufl r r r r ×12B f +C r x 觶rr -x 觶urr r r +K r x rr -x urr r r +C r x 觶rl -x 觶url r r +K r x rl -x url r r r r ×12 B r (9)Machinery Design &Manufacture 机械设计与制造 第2期2011年2月 112