第四单元飞机与飞机系统
第一章空气动力学基础知识
1.1 大气层和标准大气
1.1.1 地球大气层
地球表面被一层厚厚的大气层包围着。飞机在大气层内运动时要和周围的介质——空气——发生关系,为了弄清楚飞行时介质对飞机的作用,首先必须了解大气层的组成和空气的一些物理性质。
根据大气的某些物理性质,可以把大气层分为五层:即对流层(变温层)、平流层(同温层)、中间层、电离层(热层)和散逸层。
对流层的平均高度在地球中纬度地区约11公里,在赤道约17公里,在两极约8公里。对流层内的空气温度、密度和气压随着高度的增加而下降,并且由于地球对大气的引力作用,在对流层内几乎包含了全部大气质量的四分之三,因此该层的大气密度最大、大气压力也最高。大气中含有大量的水蒸气及其它微粒,所以云、雨、雪、雹及暴风等气象变化也仅仅产生在对流层中。另外,由于地形和地面温度的影响,对流层内不仅有空气的水平流动,还有垂直流动,形成水平方向和垂直方向的突风。对流层内空气的组成成分保持不变。
从对流层顶部到离地面约30公里之间称为平流层。在平流层中,空气只有水平方向的流动,没有雷雨等现象,故得名为平流层。同时该层的空气温度几乎不变,在同一纬度处可以近似看作常数,常年平均值为摄氏零下56.5度,所以又称为同温层。同温层内集中了全部大气质量的四分之一不到一些,所以大气的绝大部分都集中在对流层和平流层这两层大气内,而且目前大部分的飞机也只在这两层内活动。
中间层从离地面30公里到80至100公里为止。中间层内含有大量的臭氧,大气质量只占全部大气总量的三千分之一。在这一层中,温度先随高度增加而上升,后来又下降。
中间层以上到离地面500公里左右就是电离层。这一层内含有大量的离子(主要是带负电的离子),它能发射无线电波。在这一层内空气温度从-90℃升高到 1 000℃,所以又称为热层。高度在150公里以上时,由于空气非常稀薄,已听不到声音。
散逸层位于距地面500公里到1 600公里之间,这里的空气质量只占全部大气质量的1011 ,是大气的最外一层,因此也称之为“外层大气”。
1.1.2 大气的物理性质
大气的物理性质主要包括:温度、压强、密度、粘性和可压缩性等。
气体的压强p是指气体作用于容器内壁的单位面积上的正压力。大气的压强是指大气垂直地作用于物体表面单位面积上的力。
随着高度的增加,由于大气越来越稀薄,大气的压强逐渐降低。
气体的温度T表征气体的冷热程度,是与气体分子运动密切相关的。温度的度量单位常用摄氏温标t[℃]和绝对温标T[K]来表示。从微观来看,气体分子作不规则的热运动时,它的运动平均动能越大,则宏观表现为温度越高。气体分子运动的平均动能与绝对温度成正比。在绝对温标零点,理想气体的分子热运动就终止了。
单位体积物体所含有的质量称为密度。在国际单位制中,密度的单位是千克/米3。空气的密度与压力的变化成正比,与温度的变化成反比。随着高度的增加,大气的密度逐渐降低。
当气体层间发生相对运动或气体与物体间发生相对运动时,在气体内部两个流体层接触面上或者在气体与物体的两个接触面上,便产生相互牵扯和相互粘连的内摩擦力,流体的这种性质称为粘性。粘性是流体的固有属性之一。
流体粘性力的大小可以用流体的粘性系数 来表示。不同流体的粘性系数各不相同,同一流体的粘性系数也与温度有关。液体的粘性系数随温度的升高而降低,而气体的粘性系数则随温度的升高而增大。
流体在压强或温度改变时,能改变其原来体积及密度的特性,称为流体的可压缩性。
1.1.3 标准大气
飞行中作用在飞机上的空气动力和发动机推力,在其它条件相同的情况下,取决于介质(大气)的压强、温度及其它物理性质。大气的压强、密度和温度等参数在地球表面不同的几何高度上,在不同的纬度上,不同的季节,以及一天内不同的时间上是各不相同的。这样一来,同一飞机在不同的时间、不同地点所进行的同一种纲目飞行的结果也就各不相同了。
为了便于作性能计算,便于整理飞行试验数据,便于同一类飞机进行性能比较,国际航空界根据多年观测北半球中等纬度区域内,各高度上的大气压强、温度、密度等的年平均值的结果。将大气参数加以模型化,制定了国际标准大气表。
1.2 流体力学的基本概念
1.2.1 连续性假设
流体和一切物体都是由分子组成的,显然分子之间是有空间的。从微观的角度来看,流体的物理量在空间是不连续分布的,同时由于分子的随机运动,又导致任一空间点上的流体物理量对于时间的不连续性。由此可见,流体物理量的分布,从微观的角度来看,在空间和时间都是不连续的。
但是我们在流体力学中讨论的问题的特征尺寸(如飞机)往往远大于流体的分子距离。这样,我们有理由引进流体的连续介质模型:即将真正的流体看成是由稠密而无间隙的连续介质所组成的。
流体既被看成是连续介质,则反映宏观流体的各种物理量都是空间和时间的连续函数。因此,在以后的讨论中都可以引用连续函数的数学分析工具,来研究流体各种运动状态下的有关物理量之间的数量关系。
当然,流体连续介质模型是一个具有相对意义的概念。根据上述连续介质模型,把介质看成是连绵一片的流体,介质所占据的空间里到处都弥散着这种介质,而不再有空隙。低速空气动力学、高速空气动力学,甚至高超音速空气动力学都是在连续介质这样一个模型下进行研究的。只有到了外层大气,如在120—150公里的高度上,空气分子平均自由行程(一个分子在与另一个分子发生碰撞前所行经的平均路程)大约与飞机的尺寸处于同一数量级,在200公里的高度上,分子的平均自由行程有好几公里。这时空气再也不能认为是连续介质了。
1.2.2 运动转换原理
当飞机在原来静止的空气中作等速直线飞行时,将引起物体周围空气的运动,同时空气将给飞机以作用力。因此研究静止气流中飞机作等速直线运动所受的力问题可以转变为让飞机静止,以一股直匀的气流迎面吹来,两者所受的力是相等的。这就是所谓的运动转换原理。无论是实验还是理论计算,这个原理都是常用的。
1.3 低速流动特性
1.3.1 流体的连续性定理
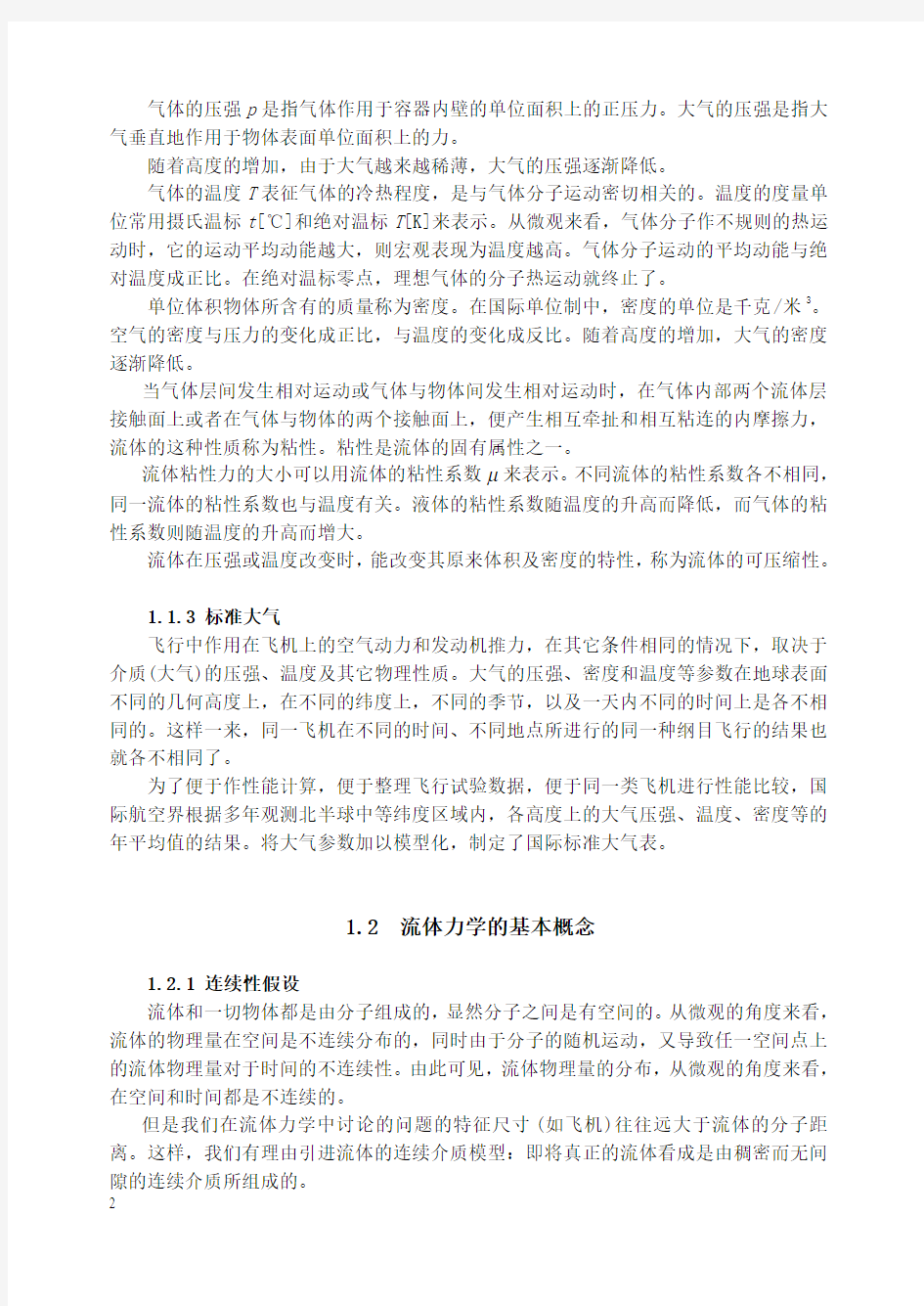
在一个容器中充满液体,把进口和出口的开关同时打开,让液体从容器中经过剖面面积不等的管道流出,同时保持容器内液体表面的位置不变(如图1-1所示)。这时,流体的流动是不随时间而变化的,因而是稳定的流动。如果流体流动的速度不太高,把流体看作是不可压缩的,即在流动过程中流体的密度不发生变化。同时流体既没有流入也没有流出。那么,管道剖面面积小的地方流速大,而管道剖面面积大的地方流速小。
常量==222111ρρv s v s (1-1)
1.3.2 流体的伯努利定理
在上述流体的连续性实验装置中,如果在不同的剖面管道上装有液体压强计,则可以从压强计内液面的高低得出不同剖面的管道内流体静压的大小。实验表明:在管道剖面面积大的地方,流体的静压也大,在管道剖面面积小的地方,流体的静压也小。 1738年瑞士物理学家伯努利首先推导出不同剖面的管道内流体的流速和静压之间的关系为
v p v p v p 2333222221112
12121ρρρ+=+=+= 常量 (1-2) 或 p v p 022
1=+ρ (1-3)
上式称为流体的伯努利方程。式中p 称为静压,v 22
1 称为动压,而p 0称为总压。 这里需要指出的是,在推导流体的伯努利方程时,要求在管道中流动的流体能量既不增加也不减少,因此它只能用于理想流动,即不考虑流体在流动过程中的能量损失。
图1-1 管道中流体的流动 1— 容器;2—管道;3—进口开关;4—出口开关;5—玻璃管
1.3.3 流动状态
流体的流动有两种状态:一种是流体微团分层地流动,各层之间不互相混淆,称为层流;另一种是流体微团作杂乱无章的运动,分不清层与层的界限,称为紊流。
流体微团运动时,每一微团都要受到粘性力(与分子的热运动有关)与惯性力(与微团加速度运动有关)的作用。粘性力起的作用占主导地位,流动将呈层流状态;惯性力起的作用占主导地位,流动则由层流状态转变为紊流状态。
1.3.4 附面层
当气流流经物体(如机翼)时,由于实际气体存在粘性,就在绕流物体的周围存在两个不同的流动区域,一是紧贴在物体表面的一个薄层(图1-2之a)及尾迹(图1-2之b),另一是外部流动区(图1-2之c)。紧贴在物体表面的这个薄层称为附面层,其厚度顺着气流是逐渐加厚的。在附面层内,必须考虑流体粘性的作用,而在外部流动区,粘性的影响可以忽略,即可将流体视为理想气体。
若沿物体表面某点处的法线把附面层放大来看,可得到附面层内流速分布的图象(如图1-3所示)。在物体的表面处,流速为零,沿法线向外,流速逐渐增大,直到等于外部流动的流速。通常把流速达到外部流速的99%这一点离表面的距离,称为该处附面层的厚度δ。
在绕流物体的前缘,δ值为零,至后缘附近,δ达到最大值。一般情况下,δ值约为绕流物体长度的1%左右。
按流体的流动状态,可以把附面层分成层流附面层和紊流附面层。经常遇到的是一种混合附面层状态:在物体前部是层流附面层,而在后部则是紊流附面层(如图1-4所示)。由层流附面层转为紊流附面层的那一点称为“转捩点”,如图1-4(c)中的T 点所示。机身和机翼表面上的转捩点位置将随着流速的增大而前移。另外,物体表面越粗糙,转捩点越靠前。
上面说的是附面层没有从物体表面分离的情况。当气流流过流线型较差的物体时,由于流速下降,压强增大,逐渐使得后部的附面层加厚,以致使附面层中的气流发生倒流,如图1-5所示。图中A 点即为气流分离点。附面层发生分离后,将在物体后部形成
图1-2 绕过机翼的粘性气流 a -附面层;b —尾迹;c —自由流
图1-3 附面层内的流速分布
涡流区(如图1-6所示)。附面层分离区和物体后部涡流区内的压强要比物体前部的小,因此,物体前部受到的压力要比后部受到的压力大,于是就形成了所谓的“压差阻力”,也称为形状阻力。有关压差阻力的概念,我们将在下一章中作详细的介绍。
图1-4 附面层流动状态图
a-层流;b—紊流;c—混合附面层
图1-5 附面层的分离图1-6 涡流区
附面层发生气流分离后,压差阻力急剧上升,导致总阻力的迅猛增大。压差阻力除与物体的外形有关外,还与它的表面光洁度、来流速度的大小和来流初始紊流度有关。由此可见,飞机的流线型外形和光洁的表面对降低阻力具有极其重要的意义。
1.3.5 翼型
所谓翼型就是沿着飞机机身纵轴平行的方向剖一刀,所剖开来的剖面形状(通常也称为“翼剖面”),如图1-7所示。所谓机身纵轴就是从机头到机尾贯穿机身的那条轴线。一般翼剖面的前端圆钝、后端尖锐,上边较弯、下边较平,上下不对称,很象一条去掉尾巴的鱼的形状。翼剖面最前端的一点称为“前缘”,最后端的一点称为“后缘”。前缘与后缘之间的连线称为“翼弦”,也称为“弦线”。翼弦或弦线的长度称为弦长,通常用b 来表示。
图1-7 翼型(翼剖面)
1—翼剖面;2—前缘;3—后缘;4—翼弦
影响翼型性能的最主要的参数是翼型的厚度和弯度。以翼弦为基础,作若干条垂直线,每一条垂线在翼型内的长度即代表该处的翼型厚度。最长的垂直线就是最大厚度c。各垂直线中点用曲线连接起来,就得到所谓的“中弧线”。相应的翼型的上表面称为“上弧线”,翼型的下表面称为“下弧线”。中弧线离翼弦最远的距离称为最大弯度f(如图1-8所示)。为便于比较不同翼型的厚度和弯度,通常采用相对厚度和相对弯度两个无量纲参数来表示。
图1-8 翼型的特征参数
飞机飞行时翼剖面与迎面气流的相对位置用攻角 来表示。所谓攻角就是指翼弦与迎面气流(相对气流)之间所夹的锐角(如图1-8所示)。攻角通常也称为迎角。
1.4 高速流动特性
气流在低速流动时,密度的变化甚微,而在高速流动时,密度的变化就非常显著,必须考虑空气可压缩性的影响。
1.4.1 弱扰动的传播和音速
说话时声带的振动,拉琴时琴弦的振动等都是对周围空气的一种微弱扰动。由此引起的空气密度等的微小变化将以一定的速度向四周传播,这个传播速度就是音速。弱扰动在气态介质中只能以纵波的形式向外传播,其形态为气体的压缩和膨胀。
音速的大小与介质的被压缩的难易程度有关,介质越难压缩,其音速越快。在大气的对流层内,空气的密度随着高度的增加而降低,因而也就越容易被压缩。所以,在对流层内音速随高度的增加而降低。
1.4.2 弱扰动在气流中的传播和马赫数
固定的弱扰动在静止介质中的传播,可以用图1-9来表示。图中的①、②、③等分别表示扰动源在观察瞬间的前1秒、前2秒、前3秒时激发形成的扰动波面。它们组成了以扰动源为圆心,na (n 为正整数)为半径的一族同心圆。这里所说的扰动源,是指可以引起空气密度等微小变化的任何物体。例如,飞机表面任意一点都可以看作是扰动源。 按照相对运动原理,弱扰动在气流中的传播相当于介质静止而扰动源以速度V 作运动。这时,根据扰动源运动速度V 与当地介质音速的比例关系,又可分为三种不同的情况。
设以0、-1、-2分别表示扰动源在观察瞬间、前1秒、前2秒的位置,当a V <时,扰动波面在扰动源前后不对称地向外传播,如图1-10所示。
当a V =时,即扰动源以音速运动,这时扰动波面只限于在扰动源后方的半个空间中传播,如图1-11所示。
图1-9 0=V 时的扰动波面 图1-10 a V <时的扰动波面 图1-11 a V =时的扰动波面
当a V >时,扰动源以超音速运动,它超过了自己激励的所有扰动波面,扰动波的传播仅限于以扰动源为顶点的一个锥面内,该锥面就是扰动区与未扰动区的分界面,称为扰动锥面,如图1-12所示。
我们把扰动源运动速度V 与当地音速a 的比值a
V M =称为马赫数。 按照M 数的不同,可以把飞行速度分为以下四类,各种情况都有各自非常明显的特点:
(1)亚音速——75.0 (2)跨音速——2.175.0<≤M (3)超音速——0.52.1<≤M (4)高超音速——0.5>M V 时的扰动波面 图1-12 a 1.4.3 激波 一、激波的形成 一般地说,当飞机的飞行M数等于或大于1时,由于空气可压缩性的影响,飞机上就会有激波产生。 飞机并不是一个微小的质点,它是由无数质点组成的庞然大物。每一个质点都在飞机前方形成一道界面波,无数道界面波叠加在一起,形成一种与飞机形状有关的强扰动波,这种扰动波前后的空气压强、密度和温度都有突变。这样的边界波就称为激波。 因此,激波的物理本质是受到强烈压缩的一层薄薄的空气,即激波是由大气的可压缩性引起的。激波的厚度很小,只有千分之一到万分之一毫米。 气流通过激波时,空气微团受到很强的阻滞,速度迅速下降,压强、温度、密度突然增高。空气在通过激波时,受到一薄层稠密空气的阻滞,使流速急剧下降,由阻滞而产生的热量来不及传走,于是加热了空气。 二、激波的分类 按相对于飞行速度(或气流速度)成垂直或成偏斜的状态,可以把激波分为正激波和斜激波。与气流速度成垂直的是正激波,而与气流速度成偏斜的则是斜激波。 激波的形状在飞行马赫数不变的情况下,主要取决于物体或飞机的形状,特别是头部的形状。关于这一点,我们将在以后作详细的介绍。 1.4.4 膨胀波 当超音速气流绕经凸角流动时,相当于流动截面逐渐扩大的情况。于是,气流就会发生膨胀,在气流的转折点处将形成一个扇形的膨胀区域,即所谓的膨胀波。气流在膨胀后的M数是增大的。图1-13表示菱形剖面机翼在超音速气流中,翼面上激波的情况。其中实线表示斜激波,虚线表示膨胀波。 图1-13 翼面上的激波与膨胀波 气流通过斜激波在机翼前半部相当于绕凹角的流动。这时,气流受到压缩,M数下降,压强升高。流过最大厚度以后相当于绕凸角的流动。这时,截面面积加大,气流膨胀,M数上升,压强下降。这样一来,在机翼的前半部是高压区而后半部是低压区,形成了所谓的“波阻”,它实质上也是一种压差阻力。 1第一章空气动力学 基础知识 第四单元飞机与飞机系统 第一章空气动力学基础知识 1.1 大气层和标准大气 1.1.1 地球大气层 地球表面被一层厚厚的大气层包围着。飞机在大气层内运动时要和周围的介质——空气——发生关系,为了弄清楚飞行时介质对飞机的作用,首先必须了解大气层的组成和空气的一些物理性质。 根据大气的某些物理性质,可以把大气层分为五层:即对流层(变温层)、平流层(同温层)、中间层、电离层(热层)和散逸层。 对流层的平均高度在地球中纬度地区约11公里,在赤道约17公里,在两极约8公里。对流层内的空气温度、密度和气压随着高度的增加而下降,并且由于地球对大气的引力作用,在对流层内几乎包含了全部大气质量的四分之三,因此该层的大气密度最大、大气压力也最高。大气中含有大量的水蒸气及其它微粒,所以云、雨、雪、雹及暴风等气象变化也仅仅产生在对流层中。另外,由于地形和地面温度的影响,对流层内不仅有空气的水平流动,还有垂直流动,形成水平方向和垂直方向的突风。对流层内空气的组 成成分保持不变。 仅供学习与交流,如有侵权请联系网站删除谢谢1 从对流层顶部到离地面约30公里之间称为平流层。在平流层中,空气只有水平方向的流动,没有雷雨等现象,故得名为平流层。同时该层的空气温度几乎不变,在同一纬度处可以近似看作常数,常年平均值为摄氏零下56.5度,所以又称为同温层。同温层内集中了全部大气质量的四分之一不到一些,所以大气的绝大部分都集中在对流层和平流层这两层大气内,而且目前大部分的飞机也只在这两层内活动。 中间层从离地面30公里到80至100公里为止。中间层内含有大量的臭氧,大气质量只占全部大气总量的三千分之一。在这一层中,温度先随高度增加而上升,后来又下降。 中间层以上到离地面500公里左右就是电离层。这一层内含有大量的离子(主要是带负电的离子),它能发射无线电波。在这一层内空气温度从-90℃升高到1 000℃,所以又称为热层。高度在150公里以上时,由于空气非常稀薄,已听不到声音。 散逸层位于距地面500公里到1 600公里之间,这里的空气质量只占全部大气质量的1011 ,是大气的最外一层,因此也称之为“外层大气”。 1.1.2 大气的物理性质 大气的物理性质主要包括:温度、压强、密度、粘性和可压缩性等。 气体的压强p是指气体作用于容器内壁的单位面积上的正压力。大气的压强是指大气垂直地作用于物体表面单位面积上的力。 仅供学习与交流,如有侵权请联系网站删除谢谢2 多旋翼无人机的结构和原理 翼型的升力: 升力的来龙去脉这是空气动力学中的知识,研究的内容十分广泛,本文只关注通识理论,阐述对翼型升力和旋翼升力的原理。 根据流体力学的基本原理,流动慢的大气压强较大,而流动快的大气压强较小。由于机翼一般是不对称的,上表面比较凸,而下表面比较平(翼型),流过机翼上表面的气流就类似于较窄地方的流水,流速较快,而流过机翼下表面的气流正好相反,类似于较宽地方的流水,流速较上表面的气流慢。大气施加与机翼下表面的压力(方向向上)比施加于机翼上表面的压力(方向向下)大,二者的压力差便形成了升力。[摘自升力是怎样产生的]。所以对于通常所说的飞机,都是需要助跑,当飞机的速度达到一定大小时,飞机两翼所产生的升力才能抵消重力,从而实现飞行。 旋翼的升力飞机,直升机和旋翼机三种起飞原理是不同的。飞机依靠助跑来提供速度以达到足够的升力,而直升机依靠旋翼的控制旋转在不进行助跑的条件下实现垂直升降,直升机的旋转是动力系统提供的,而旋翼旋转会产生向上的升力和空气给旋翼的反作用力矩,在设计中需要提供平衡旋翼反作用扭矩的方法,通常有单旋翼加尾桨式(尾桨通常是垂直安装)、双旋翼纵列式(旋转方向相反以抵消反作用扭矩)等;而旋翼机则介于飞机和直升机之间,旋翼机的旋翼不与动力系统相连,由飞行过程中的前方气流吹动旋翼旋转产生升力(像大风车一样),即旋翼为自转式,传递到机身上的扭矩很小,无需专门抵消。 而待设计的四旋翼飞行器实质上是属于直升机的范畴,需要由动力系统提供四个旋翼的旋转动力,同时旋翼旋转产生的扭矩需要进行抵消,因此本着结构简单控制方便,选择类似双旋翼纵列式加横列式的直升机模型,两个旋翼旋转方向与另外两个旋翼旋转方向必须相反以抵消陀螺效应和空机动力扭矩。 第一章基础知识 数据在计算机内的表示方法 采取二进制的方法在计算机中表示数的原因:为了适应计算机内部的电子电路。 CPU要处理的文字、声音、图像、动画这些信息媒体和程序都转换成一种特殊形式的数值——二进制数值,然后再处理,存储器要存储的各种数值也是二进制数值。 复选 在计算机中用二进制形式来表示数值,是因为||A||。 A: 计算机内部的电子电路适应二进制 B: 二进制易于转换为十六进制 C: 十六进制易于转换为二进制 D: 二进制能实现浮点数表示,从而能扩大数的表示范围 二进制数转换为十进制数 十进制数概念: 3507=3×103+5×102+0×101+7×100 二进制数概念(为了区别于十进制数,常在二进制数后加后缀B): 例:把110010B表示成十进制数。 110010B=1×25+1×24+0×23+0×22+1×21+0×20 =32+16+2 =50 二进制数加法: 计算1101001B+101100B。 1101001 +) 101100 10010101 二进制数减法: 计算10010101B-1101001B。 10010101 -) 1101001 101100 十进制数转换为二进制数 除以2取余数。(直接转换更方便) 把18表示成二进制。 18÷2=9 余0 9÷2=4 余1 4÷2=2 余0 2÷2=1 余0 1÷2=0 余1 将各次余数从右向左排列即得10010B,所以18=10010B。 直接转换举例: 将370转换成二进制数 370=101110010B 十六进制数转换为十进制数 十六进制数与二进制数间转换非常方便,有关计算机技术的书籍中介绍十六进制数的原因是: 为书写和叙述有关计算机的技术数据的方便。 十六进制就是使用16种不同的符号,分别表示0到15这16种数值,数位之间的关系则是“逢16进1”。16种符号是“0”到“9”,再加上表示10、11、12、13、14、15的“A”、“B”、“C”、“D”、“E”、“F”(大小写均可)。在用十六进制书写时,为了与二进制,十进制相区别,加上后缀符号“H”。 十六进制数概念(为了区别于十进制数,常在十六进制数后加后缀H): 把2C3DH表示成十进制数。 2C3DH=2×163+12×162+3×161+13×160 =2×4096+12×256+3×16+13 =8192+3072+48+13 =11325 +) 十六进制数减法: 计算F00EH-4C7BH。 F00EH -)4C7BH A393H 十进制数转换为十六进制数 除以16取余数。 十进制数通过二进制数的过渡,转换成十六进制数可能更方便。考核时可使用Windows 2000提供的计算器。 把9999表示成十六进制。 9999÷16=624 余15 (F) 624÷16=39 余0 39÷16=2 余7 2÷16=0 余2 于是9999=270FH。 二进制数与十六进制数相互转换 旋翼飞行器控制到底有哪些关键技术难点 (1)机体优化设计问题。对于四旋翼飞行器机体设计时,主要考虑飞行器的质量、能耗及体积等因素。飞行器的质量与能耗及体积之间相互影响,因此首先需要确定飞行器机体参数,然后选择合适的直流无刷电机、螺旋桨及电池等材料。 (2)难以建立精确的四旋翼飞行器模型。建立精确的飞行器模型是研究飞行器控制算法的基础和前提,但由于四旋翼飞行器是一个强耦合、多变量的非线性复杂系统,同时在飞行过程中很难获得准确的空气动力学参数,且飞行器容易受到空气阻力和风速的影响,因此很难建立精确的四旋翼飞行器模型。 (3)飞行器所使用的传感器采集到的姿态数据存在误差。例如:陀螺仪采集角速度时存在零漂误差和温漂误差;加速度计采集角加速度时存在振动误差和零漂误差;当飞行器处于低空飞行情况下,采用气压高度计采集高度信息存在较大的误差。这些因素都会对飞行器姿态信息和位置信息的测量产生影响,进而影响飞行器的控制性能。 (4)飞行器控制算法设计。目前针对四旋翼飞行器控制算法的研究有很多,主要有经典PID控制算法、H¥控制算法、反步法等等。飞行器算法性能主要是从响应速度、稳定性及超调量等方面进行衡量,但响应速度、稳定性及超调量这三者之间相互影响、相互制约。 ------------------------------------------------------------------------------------------------------------------------------ 飞行原理就不多讲了,飞行器的飞行姿态多种多样,有花式摇摆,大雁南归,飞流直下等多种方式; 无人机制作原理及过程 今年4月份,由技装公司自主研制的无人机“翔雁”首次亮相第十三届中国东西部投资与贸易洽谈会,并与国家测绘局签约合作意向书。该项目拟投资2000多万元,分两个阶段实施:第一阶段为研制试验阶段,包括航摄设备材料购置、航摄系统研究开发、无人机平台完善和试飞,以及相关技术及配套软件开发研究投入;第二阶段为推广阶段,建立“翔雁”无人机及航摄设备生产线,拟订无人机航摄系统应用标准,在全国范围内推广。 此前,“翔雁”无人机已完成8个起落的飞行试验验证,飞行平衡,地面视频图像清晰完整,能按程序完成各项任务。这充分证明,“翔雁”无人机已跨入自主飞行的无人机行列。 那么,“翔雁”到底是一种什么样的机型,有什么功用呢? 据技装公司副总经理王俊介绍,“翔雁”无人机长2。7米,翼展4米,可以每小时110公里的速度进行大于15小时的巡航,采用菱形联结翼气动外形、前三点式起落架、发动机后推式布局,机身、机翼、起落架均可拆卸和组装。 “翔雁”利用航空制造工艺技术,采用全新的气动外形、模块化的任务系统、领先的飞行控制系统,形成自主飞行的能力,给它加载不同的任务系统就可以完成特定的任务。她可以用作气象探测、人工降雨、航空遥感、城市治安巡逻等多用途民用无人机平台,也可完成可执行目标指示、电子干扰、信号中继、战场侦察预警、战场评估、通信中断、空中监控、边境巡逻等军事任务。 当今,许多国家、机构对无人机研制和发展热情高涨,已研制出了50多种无人机,有55个国家军队装备了无人机。美国仅装备军队的就有“全球鹰”、“暗星”、“猎人”等十几个型号,波音公司是美国的主要无人机制造商之一。 由中国自主设计制造的长空一号、长空二号、无侦五、无侦九和ASN-206无人机正在服役,领先国内外水平的“暗箭”攻击型无人机正处于设计定型阶段。 面对竞争激烈的无人机市场,“翔雁”无人机此时“展翅”是否为时已晚? “暗箭”无人机 何以进军无人机市场 技装公司经营管理处处长王从福介绍,首先,“翔雁”无人机的低成本,为研发提供了可能。它不需要氧气、空调、增压、弹射座椅等座舱设备,降低了成本和重量;不需要生命保障系统,可以适应更 第四单元飞机与飞机系统 第一章空气动力学基础知识 1.1 大气层和标准大气 1.1.1 地球大气层 地球表面被一层厚厚的大气层包围着。飞机在大气层内运动时要和周围的介质——空气——发生关系,为了弄清楚飞行时介质对飞机的作用,首先必须了解大气层的组成和空气的一些物理性质。 根据大气的某些物理性质,可以把大气层分为五层:即对流层(变温层)、平流层(同温层)、中间层、电离层(热层)和散逸层。 对流层的平均高度在地球中纬度地区约11公里,在赤道约17公里,在两极约8公里。对流层内的空气温度、密度和气压随着高度的增加而下降,并且由于地球对大气的引力作用,在对流层内几乎包含了全部大气质量的四分之三,因此该层的大气密度最大、大气压力也最高。大气中含有大量的水蒸气及其它微粒,所以云、雨、雪、雹及暴风等气象变化也仅仅产生在对流层中。另外,由于地形和地面温度的影响,对流层内不仅有空气的水平流动,还有垂直流动,形成水平方向和垂直方向的突风。对流层内空气的组成成分保持不变。 从对流层顶部到离地面约30公里之间称为平流层。在平流层中,空气只有水平方向的流动,没有雷雨等现象,故得名为平流层。同时该层的空气温度几乎不变,在同一纬度处可以近似看作常数,常年平均值为摄氏零下56.5度,所以又称为同温层。同温层内集中了全部大气质量的四分之一不到一些,所以大气的绝大部分都集中在对流层和平流层这两层大气内,而且目前大部分的飞机也只在这两层内活动。 中间层从离地面30公里到80至100公里为止。中间层内含有大量的臭氧,大气质量只占全部大气总量的三千分之一。在这一层中,温度先随高度增加而上升,后来又下降。 中间层以上到离地面500公里左右就是电离层。这一层内含有大量的离子(主要是带负电的离子),它能发射无线电波。在这一层内空气温度从-90℃升高到 1 000℃,所以又称为热层。高度在150公里以上时,由于空气非常稀薄,已听不到声音。 散逸层位于距地面500公里到1 600公里之间,这里的空气质量只占全部大气质量的1011 ,是大气的最外一层,因此也称之为“外层大气”。 1.1.2 大气的物理性质 大气的物理性质主要包括:温度、压强、密度、粘性和可压缩性等。 直升机空气动力学习题集 绪论 (0-1)试计算Z-8直升机的旋翼实度σ、桨尖速度ΩR和海平面标准大气条件下的桨尖M数。 (0-2)Z-9直升机的旋翼桨叶为线性负扭转。试画出以桨距Ф7=11。作悬停飞行的桨叶上r=(0.29~1.0)一段的剖面安装角()rφ→分布。 (0-3)关于反扭矩的是非题: a) 尾桨拉力用以平衡发动机的反扭矩,所以尾桨的位置要比发动机高。() b) 尾桨拉力用以平衡旋翼的反扭矩,所以尾桨位置距旋翼轴很远。() c)双旋翼直升机的两付旋翼总是彼此反向旋转的。() d) 尾桨没有反扭矩。() (0-4) 关于旋翼参数的是非题: a)旋翼的半径就是桨叶的长度。() b) 测量桨叶的根部宽度及尖部宽度,就可以得到桨叶的根梢比。() c) 测量桨叶的根部及尖部之间的倾斜角之差,就得到桨叶的扭度。() d) 台式电风扇实度接近1。 ( ) (0-5) 假定Y-2直升机在某飞行状态下,旋翼拉力T=1200公斤,试计算 其C T 值。(海平面标准大气) 第一章 (1-1) 论证在垂直上升状态旋翼的滑流形状是图(a )而不是图(b ) (1-2) 假定Y-2直升机在垂直飞行状态发动机的功率有84%传递给旋翼, 且悬停时悬疑的 型阻功率为诱导功率的一半,桨端损失系数к=0.92; a) 求在海平面标准大气条件下悬停时桨盘外的诱导速度; b) 求在海平面标准大气条件下悬停时的诱导功率、相对效率和直升机的单位马力载 荷; c) 若以V 0=(1/3)v 10的速度作垂直爬升,此时桨盘处的诱导速度多大?诱导功率多大? 若型阻功率与悬停时相同,旋翼消耗的总功率多大? (1-3) 上题中,若飞行重量增大20%,除增大桨距外保持其他条件及型阻 功率不变,那么其悬停诱导功率及相对效率将是多大? (1-4) 既然 a) 是否可以认为,只要把旋翼直径做得很大,就可以用很小功率的 发动机做成重型直升机? b) 直升机的发展趋势为什么是p 趋向增大? (1-5) 试根据0η的定义导出0η与桨盘载荷p 的关系。假定型阻功率与p 第一课空气动力学 一、飞行小故事 伯努利原理:丹尼尔·伯努利在1726年首先提出在水流或气流里,如果速度小,压强就大,如果速度大,压强就小。由此我们可以解释飞机为什么能够飞上天,因为机翼受到向上的升力。飞机飞行时机翼周围空气的流线分布是指机翼横截面的形状上下不对称,机翼上方的流线密,流速大,下方的流线疏,流速小。由伯努利方程可知,机翼上方的压强小,下方的压强大。这样就产生了作用在机翼上的方向的升力。 二、飞行目标 1、通过实验理解伯努利原理。 2、动手制作雷鸟飞机,知道螺旋桨的迎风面,并且了解它产生的反冲力。 3、调试雷鸟飞机,尝试提高它的滞空时间。 三、飞行所需材料 一杯水、一个吸管、一把剪刀、一架雷鸟飞机 四、飞行练习 1、练习一:感知伯努利原理 我们接下来用一个小实验来体验一下伯努利原理,从而感知飞机上浮的原因。 左手拿着短的放在水中,右手拿着长的吹气,吸管吹气的那个地方空气速度很快,这样大气压力变小,但是短吸管下面的大气压力没有变化,就会把水压到吹气的地方。 实验完成后注意整理材料哦 2、练习二、雷鸟飞上天 我们组装雷鸟模型飞机,体验伯努利原理,让飞机上天。 步骤一:取出机翼,按照一下方法折叠。标注为为正折向下折,标注为反折向上折。注意动作要轻,切勿折断机翼。 你说说飞机在飞行过程中,空气在机翼的行走的路线吗?试试用皮尺测量机翼正反面翼的长度,用速度=路程÷时间来比较一下空气在机翼正反面的流速。 我们发现:空气在机翼上方路程比下方大,时间一样,所以流速要快。流速的快慢,形成了气压下方比上方大,就形成了向上的压力,飞机就会被往上推。 步骤二:定型主翼,先给翼型定型片贴上双面胶,再将定型片粘贴到机翼上反角背面,最后用加强胶带加固。 空气动力学基础及飞行原理笔试题 1绝对温度的零度是:C A -273℉ B -273K C -273℃ D 32℉ 2 空气的组成为C A 78%氮,20%氢和2%其他气体 B 90%氧,6%氮和4%其他气体 C78%氮,21%氧和1%其他气体 D 21%氮,78%氧和1%其他气体 3 流体的粘性系数与温度之间的关系是? B A液体的粘性系数随温度的升高而增大。 B气体的粘性系数随温度的升高而增大。 C液体的粘性系数与温度无关。 D气体的粘性系数随温度的升高而降低。 4 在大气层内,大气密度:C A在同温层内随高度增加保持不变。B随高度增加而增加。 C随高度增加而减小。D随高度增加可能增加,也可能减小。 5 在大气层内,大气压强:B A随高度增加而增加。B随高度增加而减小。 C在同温层内随高度增加保持不变。C随高度增加可能增加,也可能减小。 6 增出影响空气粘性力的主要因素 B C A空气清洁度B速度梯度C空气温度D相对湿度 7 对于空气密度如下说法正确的是B A空气密度正比于压力和绝对温度B空气密度正比于压力,反比于绝对温度C空气密度反比于压力,正比于绝对温度D空气密度反比于压力和绝对温度 8 “对于音速.如下说法正确的是”C A只要空气密度大,音速就大”B“只要空气压力大,音速就大“ C”只要空气温度高.音速就大”D“只要空气密度小.音速就大” 9 假设其他条件不变,空气湿度大:B A空气密度大,起飞滑跑距离长B空气密度小,起飞滑跑距离长 C空气密度大,起飞滑跑距离短D空气密度小,起飞滑跑距离短 10一定体积的容器中。空气压力D A与空气密度和空气温度乘积成正比B与空气密度和空气温度乘积成反比 民用无人驾驶航空器系统驾驶员 训练大纲 编制:公司名称 批准人:总经理 编制时间:年月日 总经理声明 依据中国民用航空局《一般运行和飞行规则》(CCAR-91R2)、《民用航空器驾驶员和地面教员合格审定规则》(CCAR-61R4)、《民用无人驾驶航空器系统驾驶员管理暂行规定(AC-61-FS-2013-20)》及《轻小无人机运行规定(试行)(AC-91-FS-2015-31)》等有关规章的要求,为规范无人驾驶航空器系统(以下简称无人机)驾驶员和机长的训练工作,公司名称(以下简称:“**”)组织有关人员编写了《民用无人驾驶航空器系统驾驶员训练大纲》(以下简称训练大纲)。该大纲由无人机理论及实践飞行训练大纲两部分组成。 训练大纲中明确规定了取得无人机驾驶员合格证和机长合格证的训练内容、课时和有关标准,是必须完成的最低标准。实施时必须严格执行,不得随意删改,如需更改,需经总经理批准。同时,在训练过程中,按照“**”有关管理程序实施监督检查,使学员经过训练达到训练大纲所规定的标准。 该训练大纲将根据需要,适时进行修订,具体修订工作由“**”的安技部负责。总经理承诺将认真执行训练大纲内容,科学安排,循序渐进,严格标准,确保训练安全和质量。 总经理: 年月日 1.在每次完成手册改版更新工作后,将换版人的姓名以及换版的日期填入相应的空格内。 如发现缺少修订的新版,请速与公司部门联系。 2.各部门收到新版后的一个星期内完成相关所有手册的更新。 目录 第一章概述 (5) 第二章地面理论训练大纲(驾驶员/机长适用) (7) 第一节民航法规与空中交通管制(*课时) (8) 第二节无人机概述与系统组成(*课时) (9) 第三节空气动力学基础与飞行原理(*课时) (10) 第四节结构与性能(*课时) (11) 第五节通信链路与任务规划(机长适用*课时) (12) 第六节航空气象与飞行环境(*课时) (13) 第七节无人机系统特性与操纵技术(*课时) (14) 第八节无人机飞行手册及其他文档(*课时) (15) 第九节植保无人机运行及安全(附加植保等级适用)(*课时) (16) 第三章实践飞行训练大纲 (17) 第一节模拟飞行(*/*课时) (20) 第二节无人机拆装、维护、维修和保养(*/*课时) (21) 第三节地面站设置与飞行前准备(机长适用)(*/*课时) (22) 第四节起飞与降落训练(*/*课时) (23) 第五节本场带飞(*/*课时) (24) 第六节本场单飞(*/*课时) (26) 第七节紧急情况下的操纵和指挥(*/*课时) (28) 第八节植保无人机运行(适用于附加植保等级)(*/*课时) (30) 第九节考核和结业(*/*课时) (31) 直升机空气动力学现状 二级学院:航空维修工程学院 班级:航修六班 学号:14504604 姓名:李达伦 日期:2015年6月30日 直升机空气动力学现状 (航修六班14504604 李达伦) 摘要:直升机空气动力学是直升机技术研究及型号研制的基础性学科和先进学 科,本文概述了国外的直升机气动理论与方法研究、基于气动理论和方法的应用基础研究、直升机气动试验技术的研究现状。 关键词:空气动力学;直升机 Abstract:Aerodynamics of helicopter is a helicopter technological research and model development of basic disciplines and advanced subject. This paper summarizes the foreign helicopters gas dynamic theory and method of research, based on the aerodynamic theory and methods of applied basic research, helicopter aerodynamic test technology research status. Key word:Air dynamics; helicopter 1 前言 飞行器的设计和研制必须以其空气动力学为主要依据,这是飞行器研制区别 于其它武器平台的典型特征。直升机以旋翼作为主要的升力面、推力面和操纵面, 这种独特的构型和旋翼驱动方式,更使其气动特征具有复杂的非定常特征,其气 动分析和设计技术固定翼飞行器更具挑战性。 直升机气动研究是指认识直升机与空气之间作用规律、解释直升机飞行原 理、获取提升直升机飞行能力和效率的新知识、新原理、新方法的研究活动,其 主要任务是获得直升机的空气动力学特性[1]。由于直升机气动特征性直接决定了 型号飞行性能、振动特性、噪声水平,且是结构设计、寿命评估等的直接依据, 因此直升机气动研究是直升机技术研究的重要方面,更是型号研制的基础。尤其 是要实现舒适、安全、便利、快捷的直升机型号研制目标,直升机空气动力学将 体现其核心推动作用。 2 内容和范围 直升机空气动力学专业发展涵盖的内容和范围主要有直升机气动理论与方 法的研究、基于气动原理的应用基础研究以及气动特性试验研究三大内容。 直升机气动理论与方法的研究重点关注旋翼与周围空气相互作用现象及机 理的分析模型和方法,通过对气动理论和方法的研究,实现对直升机及其流场的 深入了解,以准确地计算其空气动力学特性。 气动应用研究是指基于气动理论和方法,以直升机研制为目标所展开的应用 基础研究,涵盖气动特性、气动弹性、气动噪声、结冰模拟、流动控制等应用领 无人机技术论文 摘要 本文以某型固定翼无人机为研究对象,主要研究了基于常规PID和智能PID的无人机飞行控制律的设计问题,首先,建立了无人机的六自由度数学模型,并运用小扰动线性化方法和系数冻结法分别建立了无人机纵向与横侧向系统的线性化方程:其次,介绍了一些常用的PID 控制器参数整定法和智能PID控制的基本思想,作为飞行控制律设计的理论基础:再次,分别采用常规PID和智能PID进行了纵向系统与横侧向系统控制的设计,并针对不同空域的一些典型的状态点进行了大量的仿真研究。仿真结果表明,我们所设计的常规PID控多数情况下能满足要求,智能PID控制器则具备更强的鲁棒性,能适应不同空域中更多的状态点。 关键词:无人机,常规PID(自动控制),智能PID(自动控制),飞行控制律, 无人机飞控系统的仿真研究 ABSTRACT The primary purpose of this the conventional PID control and intelligent PID control strategies to the design of the UA V’s(Unmanned Aerial Vehicle)fight control law. First of all,the UA V’5six一degrees一of-freedom(6一DOF)math linearized.Then some basis the ores and the physiques about conventional PID control and intelligent PID control are mentioned followed by a Profound research on the control semen of the log attitudinal land lateral control system of the UA V.conventional PID and intelligent PID control strategists competitively plied to the design of the flight control law of the UA V’5fourfundamentalflighteontrolmode,in eluding Pithing angle control mode,altitude holding mode,roll in gangle control mode and yaw angle control mode. Finally,an amount of simulation 15 designed to validate effectiveness of the flight 。o一troll law based on conventional PID and intelligent PID control strategies.The results of the simulation show that the conventional PID flight control law effective,and the intelligent PID flight control law superior to the forme rone. Keywords: UAV , The conventional PID,Intelligent PID,Flight Control Law , 前言: 叶片的空气动力学基础 在风力机基础知识一节中介绍过叶片的升力与阻力基本知识,本节将进一步介绍相关理论知识。在风力机基础知识一节中已作介绍的不再重复,仅介绍有关内容的提高部分。 常用叶片的翼型 由于平板叶片攻角略大就易产生气流分离,阻力增大;平板的强度也很低,所以正式的叶片截面都就是流线型的,即使有一定厚度阻力也很小。图1就是一幅常见翼型的几何参数图,该翼型的中弧线就是一条向上弯曲的弧线,称这种翼型为不对称翼型或带弯度翼型,比较典型的带弯度翼型为美国的NACA4412。 图1--翼型的几何参数 当弯度等于0时,中弧线与弦线重合,称这种翼型为对称翼型,图2就是一个对称翼型,比较典型的对称翼型为美国的NACA0012。 图2--对称翼型的几何参数 图3就是一个性能较好的适合风力机的低阻翼型,就是带弯度翼型,在水平轴风力机中应用较多。 图3--带弯度的低阻翼型 翼型的升力原理 有关翼型的升力原理解释有多种,归纳起来主要依据就是基于牛顿定律的气流偏转产生反作用力与基于伯努利原理的气流速度不同产生压差两个原理,我们结合这两个原理对翼型的升力作通俗的解释。 带弯度翼型在攻角为0度时的升力与阻力 图4就是一个带弯度翼型在攻角为0度时的流线图与压强分布图,左图就是该翼型的流线图,由于翼型上下面不对称,气流在上下面的流动状态也不同。翼型上表面就是凸起的,通道截面减小,气流的流速会加快,另一个原因就是凸起的表面使翼型后面的气压有所减小,前后的压差使得气流速度加快,特别就是翼型上表面前端流速较快。翼型下表面较平,多数气流基本就是平稳流过,由于由于上表面前端高速气流产生低压的吸引,翼型前端气流都向上表面流去,造成靠下表面的气流通道加宽,导致靠近下表面的气流速度有所下降。这样流过上表面的气流速度要比下表面快,根据伯努利原理,流速快的地方压力比流速慢的地方压力小,也就就是说翼型下方压力大于上方,压力差使翼型获得一个向上的力Fl,所以说带弯度翼型在攻角为0度时也会有升力。 图4--翼型在攻角为0度时的流线图与压强分布图图4右图就是该翼型的压力分布图,图中翼型上部分浅绿色区域内的绿色箭头线就是上表面的压力分布,箭头线的长短与方向表示该点的压 叶片的空气动力学基础 叶片的空气动力学基础 在风力机基础知识一节中介绍过叶片的升力与阻力基本知识,本节将进一步介绍相关理论知识。在风力机基础知识一节中已作介绍的不再重复,仅介绍有关内容的提高部分。 常用叶片的翼型 由于平板叶片攻角略大就易产生气流分离,阻力增大;平板的强度也很低,所以正式的叶片截面都是流线型的,即使有一定厚度阻力也很小。图1是一幅常见翼型的几何参数图,该翼型的中弧线是一条向上弯曲的弧线,称这种翼型为不对称翼型或带弯度翼型,比较典型的带弯度翼型为美国的NACA4412。 图1--翼型的几何参数 当弯度等于0时,中弧线与弦线重合,称这种翼型为对称翼型,图2是一个对称翼型,比较典型的对称翼型为美国的NACA0012。 图2--对称翼型的几何参数 图3是一个性能较好的适合风力机的低阻翼型,是带弯度翼型,在水平轴风力机中应用较多。 图3--带弯度的低阻翼型 翼型的升力原理 有关翼型的升力原理解释有多种,归纳起来主要依据是基于牛顿定律的气流偏转产生反作用力与基于伯努利原理的气流速度不同产生压差两个原理,我们结合这两个原理对翼型的升力作通俗的解释。 带弯度翼型在攻角为0度时的升力与阻力 图4是一个带弯度翼型在攻角为0度时的流线图与压强分布图,左图是该翼型的流线图,由于翼型上下面不对称,气流在上下面的流动状态也不同。翼型上表面是凸起的,通道截面减小,气流的流速会加快,另一个原因是凸起的表面使翼型后面的气压有所减小,前后的压差使得气流速度加快,特别是翼型上表面前端流速较快。翼型下表面较平,多数气流基本是平稳流过,由于由于上表面前端高速气流产生低压的吸引,翼型前端气流都向上表面流去,造成靠下表面的气流通道加宽,导致靠近下表面的气流速度有所下降。这样流过上表面的气流速度要比下表面快,根据伯努利原理,流速快的地方压力比流速慢的地方压力小,也就是说翼型下方压力大于上方,压力差使翼型获得一个向上的力Fl,所以说带弯度翼型在攻角为0度时也会有升力。 图4--翼型在攻角为0度时的流线图与压强分布图图4右图是该翼型的压力分布图,图中翼型上部分浅绿色区域内的绿色箭头线是上表面的压力分布,箭头线的长短与方向表示该点的压力 钱 第一章 1.1解:)(k s m 84.259m k R 22328315 ?=== - RT p ρ= 36 m kg 63.506303 2.5984105RT P =??== ρ 气瓶中氧气的重量为 354.938.915.0506.63G =??==vg ρ 1.2解:建立坐标系 根据两圆盘之间的液体速度分布量呈线性分布 则离圆盘中心r ,距底面为h 处的速度为 0u kn u += 当n=0时 u=0推出0u 0= 当n=h 时 u=wr 推出h wr k = 则摩擦应力τ为 h wr u dn du u ==τ 上圆盘半径为r 处的微元对中心的转矩为 θθτdrd h wr u r rdrd h wr u r dA d 3 =?=?=T 则? ? = =T 2D 0 3 3 20 32 D u drd h r u ωπθωπ 1.4解:在高为10000米处 T=288.15-0.0065?10000=288.15-65=223.15 压强为 ?? ? ??=Ta T Pa P 5.2588 M KN 43.26Ta T pa p 2588 .5=? ? ? ??= 密度为2588 .5Ta T a ? ? ? ??=ρρ m kg 4127.0Ta T a 2588 .5=? ?? ??=∴ρρ 1-7解:2M KG 24.464RT P RT p == ∴=ρρ 空气的质量为kg 98.662v m ==ρ 第二章 2-2解流线的微分方程为 y x v dy v dx = 将v x 和v y 的表达式代入得 ydy x dx y x 2dy x y 2dx 22==, 将上式积分得y 2-x 2=c ,将(1,7)点代入得c=7 因此过点(1,7)的流线方程为y 2-x 2=48 2-3解:将y 2+2xy=常数两边微分 2ydy+2xdx+2ydx=0 整理得ydx+(x+y )dy=0 (1) 将曲线的微分方程y x V dy V dy = 代入上式得 yVx+(x+y )V y =0 由22y 2xy 2x V ++=得 V x 2+V y 2=x 2+2xy+y 2 ((2) 由(1)(2)得()y v y x v y x μ=+±=, 2-5解:直角坐标系与柱坐标系的转换关系如图所示 速度之间的转换关系为{ θ θθθ θθcos v sin v v sin v cos v v r y r x +=-= 由θθθ θθθcos r 1 y v sin y r sin r 1x v cos x r rsin y rcos x =??=???????-=??=??????== 空气动力学基础及飞行原理笔试题 空气动力学基础及飞行原理笔试题 1绝对温度的零度是: C A -273℉ B -273K C -273℃ D 32℉ 2 空气的组成为 C A 78%氮,20%氢和2%其他气体 B 90%氧,6%氮和4%其他气体 C78%氮,21%氧和1%其他气体 D 21%氮,78%氧和1%其他气体 3 流体的粘性系数与温度之间的关系是? B A液体的粘性系数随温度的升高而增大。 B气体的粘性系数随温度的升高而增大。 C液体的粘性系数与温度无关。 D气体的粘性系数随温度的升高而降低。 4 在大气层内,大气密度: C A在同温层内随高度增加保持不变。 B随高度增加而增加。 C随高度增加而减小。 D随高度增加可能增加,也可能减小。 5 在大气层内,大气压强: B A随高度增加而增加。 B随高度增加而减小。 C在同温层内随高度增加保持不变。 C随高度增加可能增加,也可能减小。 6 增出影响空气粘性力的主要因素 B C A空气清洁度 B速度梯度 C空气温度 D相对湿度 7 对于空气密度如下说法正确的是 B A空气密度正比于压力和绝对温度 B空气密度正比于压力,反比于绝对温度C空气密度反比于压力,正比于绝对温度 D空气密度反比于压力和绝对温度 8 “对于音速.如下说法正确的是” C A只要空气密度大,音速就大” B“只要空气压力大,音速就大“ C”只要空气温度高.音速就大” D“只要空气密度小.音速就大” 9 假设其他条件不变,空气湿度大: B A空气密度大,起飞滑跑距离长B空气密度小,起飞滑跑距离长 C空气密度大,起飞滑跑距离短 D空气密度小,起飞滑跑距离短 10一定体积的容器中。空气压力 D A与空气密度和空气温度乘积成正比 B与空气密度和空气温度乘积成反比 C与空气密度和空气绝对湿度乘积成反比D与空气密度和空气绝对温度乘积成正比11 一定体积的容器中.空气压力 D A与空气密度和摄氏温度乘积成正比 B与空气密度和华氏温度乘积成反比 C与空气密度和空气摄氏温度乘积成反比 D与空气密度和空气绝对温度乘积成正比12 对于露点温度如下说法正确的是 BC A“温度升高,露点温度也升高” B相对湿度达到100%时的温度是露点温度 C“露点温度下降,绝对湿度下降” D露点温度下降,绝对湿度升高“ 13”对于音速,如下说法正确的是” AB A音速是空气可压缩性的标志 B空气音速高,粘性就越大 C音速是空气压力大小的标志 D空气速度是空气可压缩性的标志 14国际标准大气的物理参数的相互关系是: B A温度不变时,压力与体积成正比B体积不变时,压力和温度成正比 C压力不变时,体积和温度成反比 D密度不变时.压力和温度成反比 15国际标准大气规定海平面的大气参数是:B 第一章计算机基础知识 1.1 计算机概述 1.电子计算机的发展 世界上第一台名为ENIAC的数字电子计算机于1946年诞生在美国宾夕法尼亚大学,在半个世纪的飞速发展过程中经历了4个时代。 2.微型计算机的发展 1971年由美国Intel公司的工程师马西安·霍夫(M·E·Hoff)设计了世界上第一台名为MCS-4的4位微型计算机。该机是由一片4位微处理器Intel 4004 、一片320位(40字节)的随机存取存储器、一片256字节的只读存储器和一片10位的寄存器通过总线连接起来的。 3.计算机的分类 4.计算机的应用 (1) 科学计算 如:计算量大、数值变化范围大的天文学、量子化学、空气动力学、核物理学和天气预 报等领域中的复杂运算。 (2) 数据处理 是计算机应用的一个重要方面,如:办公自动化、企业管理、事务管理、情报检索等非 数值计算的领域。 (3) 过程控制 如:冶金、石油、化工、纺织、水电、机械、航天等现代工业生产过程中的自动化控制。 (4) 计算机辅助系统 计算机辅助设计CAD:如飞机、船舶、建筑、机械、大规模集成电路等的设计。 计算机辅助制造CAM:用计算机进行生产设备的管理、控制和操作。 计算机辅助教育CBE:如计算机辅助教学CAI、计算机辅助测试CAT、计算机管 理教学CMI (5) 人工智能 AI 是计算机应用研究的前沿学科。 (6) 信息高速公路(此即“国家信息基础设施”NII的俗称) 我国已建立的大型计算机应用工程��"金"字工程: 金桥工程(全国经济信息网) 金卡工程(金融信息网) 金关工程(外贸海关信息网) 金智工程(教育科研信息网) (7)电子商务 利用国际互联网Internet 进行网上商务活动,始于1996年,现已发展迅速,全球已有许多企业先后开展了“电子商务”活动。 2.1 信息在计算机内的表示 1. 基本概念 数据:是对事实、概念或指令的一种特殊表达形式,这种特殊的表达形式可以用人工的方式或用自动化的装置进行通信、翻译转换或者进行加工处理。 它包括数字、文字、图画、声音、活动图象等。 数据处理:是对数据进行加工、转换、存储、合并、分类、排序与计算的过程。 信息:是对人有用的数据。 媒体:是承载信息的载体。 包括:感觉媒体、表示媒体、存储媒体、表现媒体、传输媒体。 第一章管理概述 第一节管理的概念与特性 一、管理的概念 1、管理是人类社会(协作劳动)和(共同生活)的产物。 2、管理就是管理者在一定的环境和条件下,为了实现特定的目的,动员和运用有效资源而进行的(计划、组织、领导和控制)等社会活动。管理的这一定义具有如下含义: ①管理是以管理者为主体进行的活动;②管理在一定的环境和条件下进行的; ③管理是为了实现特定的目标;④管理需要动员和配置有效资源; ⑤管理具有基本的职能;⑥管理是一种社会实践活动。 3、管理的(目标)是管理的(出发点和归宿),具体的管理活动具有不同的目标,为了实现(特定的目标)是一切管理活动的共性。 4、管理主体可以是以个人形式存在的领导者,也可以是以集体形式出现的决策者或领导者。 5、围绕管理目标的实现而合理动员和配置有效资源是达到有效管理的必要环节。 二、管理的特性 1、管理的特性包括(两重性、目标性、组织性、创新性)。 2、管理的两重性首先是指管理的(一般性和特殊性),也指管理的(科学性和艺术性)。 3、管理与社会生产和公共生活相伴而生的特性就是管理的一般性。 4、就管理的特殊性,作为一种社会活动,管理都是在(特定的)社会经济政治关系中进行的。 5、管理具有的目标性已成为现代管理中目标管理方式的重要依据。 6、(组织)在管理中起着关键枢纽作用,构成了管理的核心要素。 第二节管理的职能和类型 一、管理的职能 1、管理的四个基本职能是(计划、组织、领导和控制)。 2、计划是管理的(首要)职能,计划的工作程序和内容是(活动条件研究、制定业务决策、编制行动计划)。活动条件研究包括(内部能力研究、外部环境研究)。 3、计划方案需要组织工作落实,组织工作的程序和内容是(设计组织、人员配备、组织变革)。 4、控制工作过程包括(衡量组织成员的工作绩效、发现偏差、采取矫正措施)三个步骤。 二、管理职能的发展 1、管理职能的发展有(协调、决策、创新)。 三、管理的类型 1、按不同领域及其主体组织形式,现代社会的管理可分为(公共管理和企业管理)。 2、公共管理是以公共组织为依托,运用公共权力,为有效实现公共利益而进行的管理活动。 3、公共管理特点:①以公共利益的实现为目标;②以公共组织为依托;③是公共权力的运用过程;④具有独占性;⑤接受公众监督。 4、政府进行的行政管理是公共管理的主要形式,政府的管理具有典型的合法性和强制性。 5、公共权力来源于社会成员在公共生活中的权利。 6、公共产品是指具有消费的非排他性和非竞争性的产品,包括有形的产品,如(国防、公共道路、桥梁及其他公共工程设施),也包括无形的产品,如(法律、规章制度、政策及意识形态)。1第一章 空气动力学基础知识复习过程
多旋翼无人机的结构和原理
第一章 基础知识
无人机关键技术
课题_无人机制作原理及过程
1第一章 空气动力学基础知识
南航直升机空气动力学习题集17页
第一课 无人机空气动力学
空气动力学基础知识及飞行基础原理笔试题
无人机培训学校大纲模板仅供参考
直升机空气动力学现状和发展趋势
无人机技术论文
叶片的空气动力学基础
叶片的空气动力学基础
空气动力学课后答案(北航)
空气动力学基础及飞行原理笔试题讲课教案
第一章计算机基础知识
管理基础知识 第一章
相关主题
文本预览