EtherCAT总线式多轴运动控制器开发 运动控制器是数控系统实现精密运动控制的核心,是数控机床的关键设备。随着电子技术和网络通信技术的快速进步,具有开源性、开放性和快速性的运动控制系统将成为未来的发展趋势。因此,传统的运动控制器已不能满足现代化制造的发展需求。 基于实时以太网的多轴运动控制系统是当前工业应用技术领域的主要研究方向之一。本文针对工业以太网技术进行了研究,以EtherCAT通信技术为基础,设计了一种基于ARM和FPGA双核的EtherCAT总线式多轴运动控制器,并提出了总体设计方案,重点设计运动控制器的硬件和软件。在硬件设计上,本文选用了ST公司推出的ARM芯片-STM32F407ZGT作为核心处理器,以Altera公司的CycloneⅣ系列FPGA芯片-EP4CE10E22C8为协处理器。 采用倍福公司的ET1200芯片作为从站EtherCAT总线通信链路层,实现PC 机主站与从站运动控制器的通信功能。此外,本文详细分析和设计了各个主芯片的外围接口电路、运动控制模块和电源模块等电路。基于本系统的硬件架构,设计了运动控制器的控制程序软件结构。 采用C语言,在ARM芯片中嵌入了μ/OS-Ⅱ操作系统,开发了EtherCAT从站驱动,并设计了相应的指令解析程序。在QuartusⅡ开发环境下,使用Verilog HDL 编程语言,对位置控制模块、S型速度规划模块和插补模块等运动控制技术进行了研究和开发。在硬件设计基础上,完成了PCB板的绘制和加工,制作了控制器样机。 搭建多轴运动控制实验仿真平台,开发上位机硬件调试软件并验证了硬件各个模块功能。设计了PC机主站,完成了EtherCAT通信、点到点运动控制、多轴
目录 PMAC控制卡学习(硬件) (2) 第一章PMAC简介 (2) 1.1 PMAC的含义和特点 (2) 1.2 PMAC的分类及区别 (2) 1.2.1 PMAC的分类 (2) 1.2.2 PMAC 1型卡与2型卡的主要区别 (2) 第二章Turbo PMAC Clipper控制器硬件配置 (3) 2.1 Turbo PMAC Clipper控制器简介 (3) 2.2 Turbo PMAC Clipper硬件配置 (3) 2.2.1 Turbo PMAC Clipper硬件标准配置为: (3) 2.2.2 Turbo PMAC Clipper控制器可选附件 (6) 2.2.2.1 轴接口板 (6) 2.2.2.2 反馈接口板 (6) 2.2.2.3 数字I/O接口板 (7) 第三章Turbo PMAC Clipper设备连接 (7) 3.1 板卡安装 (7) 3.2 控制卡供电 (7) 3.2.1 数字电源供电 (7) 3.2.2 DAC(数字/模拟转换)输出电路供电 (7) 3.2.3 标志位供电 (8) 3.3 限位及回零开关 (8) 3.3.1 限位类型 (8) 3.3.2 回零开关 (8) 3.4电机信号连接 (8) 3.4.1增量式编码器连接 (8) 3.4.2 DAC 输出信号 (9) 3.4.3 脉冲&方向(步进)驱动 (10) 3.4.4 放大器使能信号(AENAn/DIRn) (10) 3.4.5 放大器错误信号(FAULT-) (10) 3.4.6 可选模拟量输入 (11) 3.4.7 位置比较输出 (11) 3.4.8 串行接口(JRS232) (11) 3.5 设备连接示例 (11) 3.6 接口及指示灯定义 (13) 3.7 跳线定义 (15) 3.8 Turbo PMAC Clipper端口布置及控制结构图 (19) 附件 (21) 1.接口各针脚定义 (21) 2. 电路板尺寸及孔位置 (30)
目录
PMAC控制卡学习(硬件) 第一章PMAC简介 PMAC的含义和特点 1.PMAC的含义: PMAC是program multiple axis controller 可编程的多轴运动控制卡。 的特点: PMAC卡是美国Delta Tau公司九十年代推出的多功能运动控制器,能够提供运动轴控制,PLC控制和数据采集等多种功能。 PMAC的分类及区别 PMAC的分类 1. PMAC卡按控制电机的来分:有1型卡和2型卡。1型卡控制信号为±10V 模拟量,主要用速度方式控制伺服电。2型卡输出PWM数字量信号,可直接变为PULSE+DIR信号,来控制步进电机和位置控制方式的伺服电机。 2. PMAC卡按控制轴数来分:有2轴卡(MINI PMAC PCI),4轴卡(PMAC PCI Lite,PMAC2 PCI Lite,PMAC2A-PC/104及Clipper),8轴卡:(PMAC-PCI,PMAC2-PCI,PMAC2A-PC/104及Clipper),32轴卡:(TURBO PMAC和TURBO PMAC2)。 3. PMAC卡按通讯总线形式分:有ISA总线,PCI总线,PCI04总线,网口和VME总线。PMAC各种轴数的1型和2型卡,都有上述的计算机总线方式供选择。PMAC除上述形式外,还可以提供集成的系统级产品.有:UMAC,IMAC400,IMAC800 ,IMAC flexADVANTAGE400 ,ADVANTAGE900等。 PMAC 1型卡与2型卡的主要区别 PMAC 1 PMAC2 CPU时钟(缺省)20MHZ 40MHZ
控制信号形式DAC模拟量PWM数字量 双端口RAM选项只有8轴卡不在板在板 在板I/O点数16IN 16OUT 32IN/OUT +8IN 8 OUT 常用接线板ACC8D ACCP ACC8F ACC8S ACC8E 第二章Turbo PMAC Clipper控制器硬件配置Turbo PMAC Clipper控制器简介 Turbo PMAC Clipper控制器(Turbo PMAC2 Eth-Lite) 是一款具备全部Turbo PMAC 特征的,用于对成本极端敏感的应用的多轴运动控制器。这种功能强大的,但是又同时具备结构紧凑和超高性价比优点的多轴运动控制器,标准版本即带有Ethernet 以太网和 RS232 通讯接口以及内置 I/O。 Clipper 控制器不仅采用了一颗完整的Turbo PMAC2-CPU 而且提供了一个四轴伺服或步进控制加32个数字I/O 点的最小配置,控制轴数和I/O还可以扩展。 Turbo PMAC Clipper硬件配置 Turbo PMAC Clipper硬件标准配置为: ●电路板尺寸是110mm×220mm; ●80 MHz DSP56303 Turbo PMAC CPU(CPU时钟频率为80MHZ); ●256k x 24用户SRAM(即静态随机存储器,是一种具有静止存取功能的,不需 要刷新电路即能保存它内部存储的数据。存储容量为256K,地址线有24条。); ●1M x 8 flash mermory用于备份及固件存储;(闪存是一种非易失性,即断 电数据也不会丢失。内存为1M,8条I/O接口。); ●RS-232串行接口;(上的之一,通常 RS-232 接口以9个(DB-9)的型态出现, 一般个人上会有两组 RS-232 接口,分别称为 COM1 和 COM2。); ●100 Mbps以太网接口;(传输速率100Mbps=100/8=s) ●480 Mbps USB 接口;
OpenHW12项目申请 基于ZYNQ SoC的多轴运动控制系统 安富利特别题目 基于Zynq平台的伺服控制或运动控制系统 项目成员:顾强牛盼情孙佳将马浩 华中科技大学 二〇一二年十一月
目录 1项目概述 (1) 1.1工业应用 (1) 1.2系统方案 (3) 2工作原理介绍 (6) 3项目系统框架图 (8) 3.1ZYNQ硬件系统框架图 (8) 3.2软件系统框架图 (9) 3.3多轴控制器实现 (10) 4项目设计预计效果 (11) 5附录一:项目技术基础 (13) 5.1软硬件协同设计架构 (13) 5.2软件设计 (14) 5.3总结 (16) 6附录二:ZYNQ基础 (16)
1项目概述 1.1 工业应用 运动控制系统广泛应用于工业自动化领域,包括机器人手臂、装配生产线、起重设备、数控加工机床等等。并且随着高性能永磁材料的发展、电力电子技术的发展以及大规模集成电路和计算机技术的发展使得永磁同步电机(PMSM,Permanent Magnet Synchronous Motor)控制系统的设计开发难度降低、成本降低,同时PMSM在运动控制系统中作为执行器件的应用也越来越广泛。大量运动控制器的设计与实现都是基于通用嵌入式处理器。在此基础上,很多学者和研究人员对运动控制系统进行了大量的研究。 多轴控制的发展是为了满足工业机器人、工业传动等应用需求。其主要包括两大方面,多轴串联控制和多轴同步控制。当系统负载较大、传动精度要求很高、运行环境比较复杂的情况下,经常使用多轴串联的方式来解决,如图1.1所示。 (1)双电机齿条传动(2)NASA 70-m天线设备 图1.1 多轴串联控制系统应用
运动控制卡概述 ? ?主要特点 ?SMC6400B独立工作型高级4轴运动控制器 功能介绍: 高性能的独立工作型运动控制器以32位RISC为核心,控制4轴步进电机、伺服电机完成各种功能强大的单轴、多轴运动,可脱离PC机独立工作。 ●G代码编程 采用ISO国标标准G代码编程,易学易用。既可以在文本显示器、触摸屏上直接编写G代码,也可以在PC机上编程,然后通过USB通讯口或U盘下载至控制器。 ●示教编程 可以通过文本显示器、触摸屏进行轨迹示教,编写简单的轨迹控制程序,不需要学习任何编程语言。 ●USB通讯口和U盘接口 支持USB1.1全速通讯接口及U盘接口。可以通过USB接口从PC机下载用户程序、设置系统参数,也可用U盘拷贝程序。
●程序存储功能 程序存储器容量达32M,G代码程序最长可达5000行。 ●直线、圆弧插补及连续插补功能 具有任意2-4轴高速直线插补功能、任意2轴圆弧插补功能、连续插补功能。应用场合: 电子产品自动化加工、装配、测试 半导体、LCD自动加工、检测 激光切割、雕铣、打标设备 机器视觉及测量自动化 生物医学取样和处理设备 工业机器人 专用数控机床 特点: ■不需要PC机就可以独立工作 ■不需要学习VB、VC语言就可以编程 ■32位CPU, 60MHz, Rev1.0 ■脉冲输出速度最大达8MHz ■脉冲输出可选择: 脉冲/方向, 双脉冲 ■2-4轴直线插补 ■2轴圆弧插补 ■多轴连续插补 ■2种回零方式 ■梯型和S型速度曲线可编程
■多轴同步启动/停止 ■每轴提供限位、回零信号 ■每轴提供标准伺服电机控制信号 ■通用16位数字输入信号,有光电隔离 ■通用24位数字输出信号 ■提供文本显示器、触摸屏接口 技术规格: 运动控制参数 运动控制I/O 接口信号 通用数字 I/O 通用数字输入口 通用数字输出口 28路,光电隔离 28路,光电隔离,集电极开路输出 通讯接口协议
目录 PMAC控制卡学习(硬件) (3) 第一章 PMAC简介 (3) 1.1 PMAC的含义和特点 (3) 1.2 PMAC的分类及区别 (4) 1.2.1 PMAC的分类 (4) 1.2.2 PMAC 1型卡与2型卡的主要区别 (4) 第二章Turbo PMAC Clipper控制器硬件配置 (5) 2.1 Turbo PMAC Clipper控制器简介 (5) 2.2 Turbo PMAC Clipper硬件配置 (5) 2.2.1 Turbo PMAC Clipper硬件标准配置为: (5) 2.2.2 Turbo PMAC Clipper控制器可选附件 (8) 2.2.2.1 轴接口板 (8) 2.2.2.2 反馈接口板 (9) 2.2.2.3 数字I/O接口板 (9)
第三章 Turbo PMAC Clipper设备连接 (9) 3.1 板卡安装 (9) 3.2 控制卡供电 (10) 3.2.1 数字电源供电 (10) 3.2.2 DAC(数字/模拟转换)输出电路供电 (10) 3.2.3 标志位供电 (10) 3.3 限位及回零开关 (10) 3.3.1 限位类型 (11) 3.3.2 回零开关 (11) 3.4电机信号连接 (11) 3.4.1增量式编码器连接 (11) 3.4.2 DAC 输出信号 (12) 3.4.3 脉冲&方向(步进)驱动 (12) 3.4.4 放大器使能信号(AENAn/DIRn) (13) 3.4.5 放大器错误信号(FAULT-) (13)
3.4.6 可选模拟量输入 (13) 3.4.7 位置比较输出 (14) 3.4.8 串行接口(JRS232) (14) 3.5 设备连接示例 (14) 3.6 接口及指示灯定义 (16) 3.7 跳线定义 (19) 3.8 Turbo PMAC Clipper端口布置及控制结构图 (23) 附件 (26) 1.接口各针脚定义 (26) 2. 电路板尺寸及孔位置 (35) PMAC控制卡学习(硬件) 第一章 PMAC简介 1.1 PMAC的含义和特点 1.PMAC的含义:
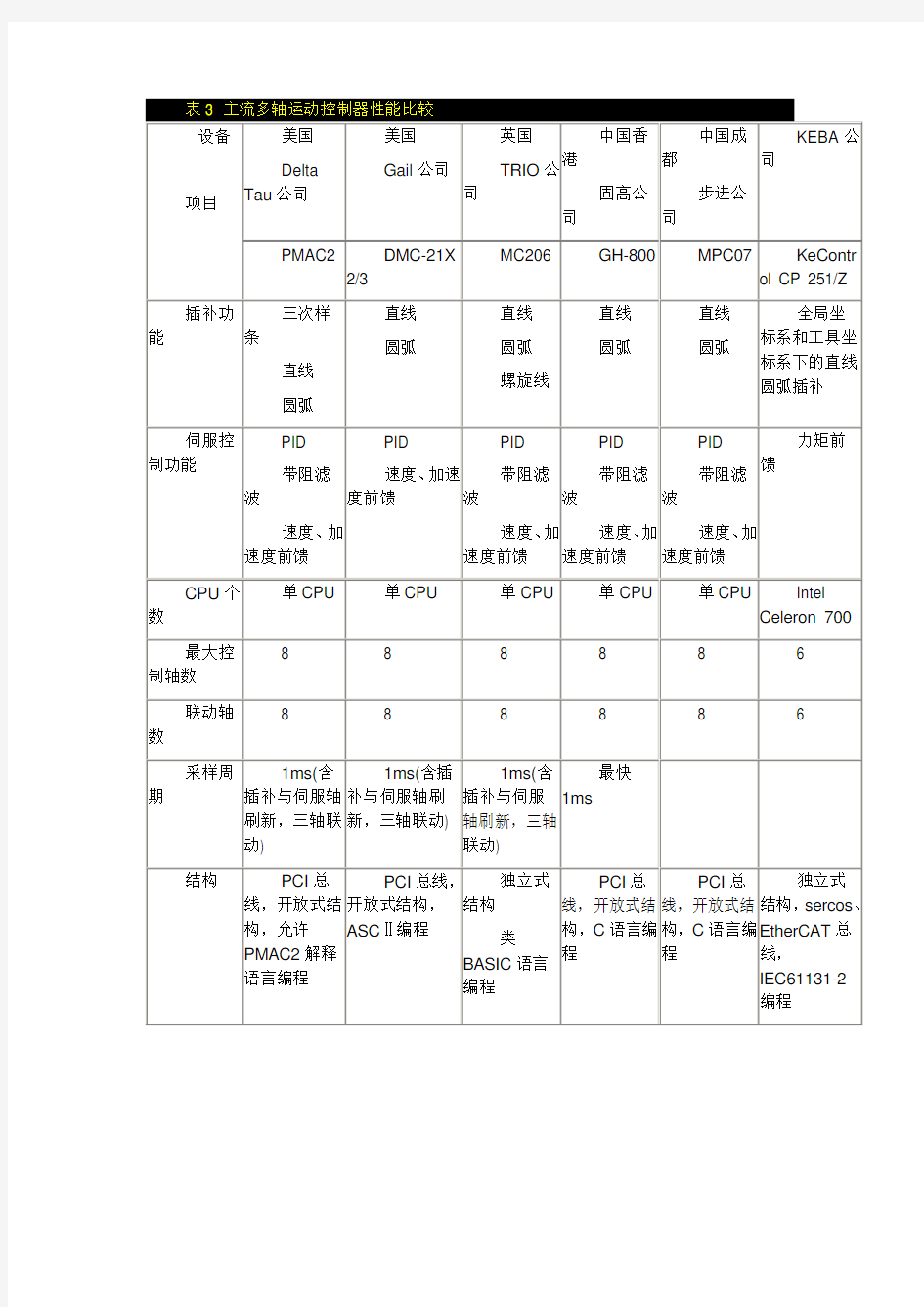
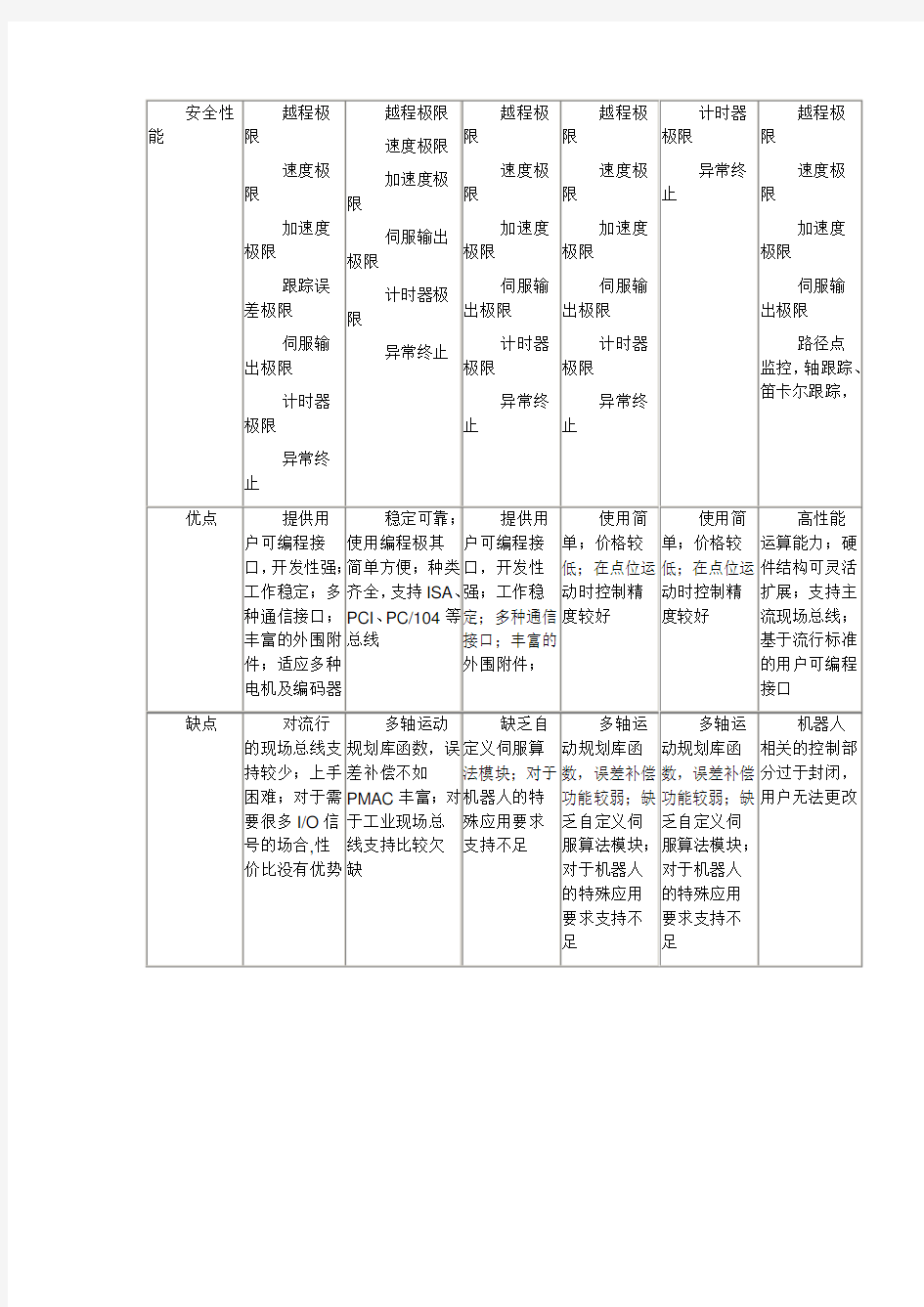
通用运动控制器目前主要分类浅谈 目前,我国是世界上经济发展最快的国家,市场上新设备的控制需求、 传统设备技术升级、换代对运动控制器的市场需求越来越大。另外由于市场日 益竞争的压力,系统集成商和设备制造商要求运动控制系统向开放式方向发展。同时,经济型数控市场占有率正在逐渐减小。在这样的形势下,我国可以抓住 这一机遇,研制出具有自主知识产权,具有高水平、高质量、高可靠性的开放 式运动控制器产品。 (1)基于计算机标准总线的运动控制器,它是把具有开放体系结构,独立 于计算机的运动控制器与计算机相结合构成。这种运动控制器大都采用DSP 或微机芯片作为CPU,可完成运动规划、高速实时插补、伺服滤波控制和伺服驱动、外部I/O 之间的标准化通用接口功能,它开放的函数库可供用户根据不同的需求,在DOS 或WINDOWS 等平台下自行开发应用软件,组成各种控制系统。如美国Deltatau 公司的PMAC 多轴运动控制器和固高科技(深圳)有限公司的GT 系列运动控制器产品等。目前这种运动控制器是市场上的主流产品。 (2)Soft 型开放式运动控制器,它提供给用户最大的灵活性,它的运动控制软件全部装在计算机中,而硬件部分仅是计算机与伺服驱动和外部I/O 之间的标准化通用接口。就像计算机中可以安装各种品牌的声卡、CDROM 和相应的驱动程序一样。用户可以在WINDOWS 平台和其他操作系统的支持下,利用开放的运动控制内核,开发所需的控制功能,构成各种类型的高性能运动控 制系统,从而提供给用户更多的选择和灵活性。基于Soft 型开放式运动控制器开发的典型产品有美国MDSI 公司的Open CNC、德国PA(Power Automation)公司的PA8000NT。美国Soft SERVO 公司的基于网络的运动控制
毕业设计(论文)开题报告 1.结合毕业设计(论文)课题情况,根据所查阅的文献资料,每人撰写2000字左右的文献综述: 多轴运动控制器文献综述 摘要:运动控制是20世纪90年代在国际上兴起的结合现代电力电子技术、计算机 技术、传感器技术等进行控制系统设计的一门多学科交叉的技术,在数控机床、 汽车、轻工、纺织和军事等领域应用广泛,其中的数控技术、机器人技术更是一个 国家运动控制技术发展水平的重要标志。 Abstract:Motion control is a interdisciplinary technology in the nineteen nineties,as the combination of modern power electronics technology, computer Technology, sensor technology, control system design . In the NC machine tool,Auto, light industry, textile and military and other fields are widely used, in which the numerical control technology, robotic technology are the symbol of a state's level of development of motion control technology. 1.运动控制器的概念: 运动控制起源于早期的伺服控制。简单地说,运动控制就是对机械运动部件的位置、速度等进行实时的控制管理,使其按照预期的运动轨迹和规定的运动参数进行运动。早期的运动控制技术主要是伴随着数控技术、机器人技术和工厂自动化技术的发展而发展的。早期的运动控制器实际上是可以独立运行的专用的控制器,往往无需另外的处理器和操作系统支持,可以独立完成运动控制功能、工艺技术要求的其他功能和人机交互功能。这类控制器可以成为独立运行的运动控制器。这类控制器主要针对专门的数控机械和其他自动化设备而设计,往往已根据应用行业的工艺要求设计了相关的功能,用户只需要按照其协议要求编写应用加工代码文件,然后传输到控制器,控制器即可完成相关的动作。这类控制器往往不能离开其特定的工艺要求而跨行业应用,控制器的开放性仅仅依赖于控制器的加工代码协议,用户不能根据应用要求而重组自己的运动控制系统2.运动控制需求:
四轴控制器使用说明书
目录 版权申明 .................................................................................................... 错误!未定义书签。第一章概述 .. (5) 1.1 产品简介 (4) 1.2应用领域 (4) 1.3图片展示 (4) 第二章PCB结构及功能 (6) 2.1 MCU简述 (5) 2.2 PCD4641简述 (6) 2.2.1PCD4641概要 (6) 2.2.2特长 (6) 2.2.3主要功能介绍 (6) 2.3 MCU控制芯片方式说明 (8) 2.4 调试接口接线线序说明 (10) 2.5 BOOT接头说明 (11) 2.6启动开关 (11) 2.7电气接口 (12) 2.7.1驱动器接头 (12) 2.7.2运动反馈信号接头 (14) 2.7.3励磁时序信号和通用IO口接头 (13) 第三章FSMC简介及接线说明 (15) 3.1 FSMC简述 (15) 3.1.1 FSMC概要 (15) 3.1.2 FSMC映射地址空间 (17) 3.1.3 技术优势 (16) 3.2 MCU访问PCD4641线序说明 (17) 第四章MCU使用FSMC访问PCD4641的具体实现 (18) 4.1 PCD4641A并行接口方法 (20) 4.2 命令 (19) 4.2.1 启动方式命令 (19) 4.2.2 控制方式命令 (20)
4.2.3 寄存器选择命令 (23) 4.2.4 输出模式命令 (24) 4.2.5状态寄存器 (26) 4.3 具体的C语言实现 (24) 第五章上位机通信 (28) 5.1 上位机与四轴控制器的硬件连接 (28) 5.2 上位机与四轴控制器的通信连接 (29) 5.3 如何控制四轴控制器 (30) 第六章四轴控制器开发环境使用说明 (36) 6.1 与PCB板的硬件连接 (36) 6.2 驱动的安装 (32) 6.3 IAR开发环境的安装 (34) 6.4 IDE相关设置 (35) 6.5 程序的开发设计 (42) 第七章下载程序 (43) 7.1 用USB串口线连接四轴控制器 (39) 7.2 下载程序 (44) 第八章使用安全注意事项 (43)
数控插补多轴运动控制系统解剖实验 实验学时:8 实验类型:独立授课实验 实验要求:必修 一、实验目的 1、通过本实验使学生掌握数控插补多轴控制装置的基本工作原理; 2、根据常用低压电器原理分析各运动控制电气元件的应用原理,分析数控插补运 动实现的控制原理; 3、根据机电一体化产品的设计要求和设计流程进行运动控制系统的功能分析、机 械结构分析、控制系统分析以及相关传感器选型等方面的设计内容。 本实验以数控插补多轴运动控制系统为具体对象,使学生掌握机电一体化产品设计和开发的技术流程和主要内容,通过运动控制系统的实现过程掌握常用电气元件识别和原理、数控插补原理、位置伺服控制系统等的设计和实现方式。 二、实验内容 1、通过数控插补多轴控制装置及其相关系统的测试和观察,分析数控插补的工作 原理; 2、分析系统的功能、机械结构分析、运动关系以及相关传感器等,分析其相关的 机械结构、电机及其驱动模块和传感反馈环节等; 3、根据常用低压电器原理,分析系统各运动控制电气元件的应用原理,分析数控 插补运动过程实现的控制原理,并绘制相关的控制原理图和系统连接图。 三、实验设备 1、多轴运动控制系统一套(含电控箱) 2、PC机一台 3、GT-400-SG-PCI 卡一块(插在 PC机内部) 四、实验原理
该数控插补多轴运动控制系统是依据开放式数控系统原理构建的,其以通用计算机(PC)的硬件和软件为基础,采用模块化、层次化的体系结构,能通过各种形式向外提供统一应用程序接口的系统。开放式数控系统可分为 3类:(1)CNC 在 PC 中;(2)PC作为前端,CNC作为后端;(3)单 PC,双 CPU平台。 本实验采用第一类,把顾高公司的 GT-400-SG-PCI 多轴运动控制卡插入PC机的插槽中,实现电机的运动控制,完成多轴运动控制系统的控制。其优点如下:(1)成本低,采用标准 PC机;(2)开放性好,用户可自定义软件;(3)界面比传统的 CNC 友好。 图1为该系统的硬件构成图,运动平台机械本体采用模块化拼装,主要由普通PC机、电控箱、运动控制卡、伺服(步进)电机及相关软件组成。其主体由两个直线运动单元(GX系列)组成。每个GX系列直线运动单元主要包括:工作台面、滚珠丝杆、导轨、轴承座、基座等部分,其结构见图2。伺服型电控箱内装有交流伺服驱动器,开关电源,断路器,接触器,运动控制器端子板,按钮开关等。步进型电控箱则装有步进电机驱动器,开关电源,运动控制器端子板,船形开关等。 图1 数控插补多轴控制系统硬件构成
DSP+FPGA四轴运动控制器设计方案 引言 运动控制技术是制造自动化的关键基础,其水平高低是衡量一个工业现代化的重要标志,研究和开发具有开放式结构的运动控制器是当前运动控制领域的一个重要发展方向。设计了一种基于DSP与FPGA的运动控制器。该控制器以DSP和FPGA为核心器件,针对运动控制中的实时控制、高精度等具体问题,规划了DSP的功能扩展,并在FPGA上扩展了功能相互独立的四轴运动控制电路。该电路实现了四路控制信号输出,四路编码信号的接收和处理,以及原点信号,正负限位信号等数字量的接收和处理。具有结构简单、开放性、模块化等特点,能够较好的满足运动控制器的实时性和精确性。 1 系统概述 该四轴运动控制器系统以TI公司C2000系列DSP芯片TMS320F2812和ALTERA公司CycloneⅡ系列FPGA芯片EP2C8F256C6为核心,DSP通过网口接收上位机的控制参数,完成系统位置、速度控制及运动轨迹规划;FPGA完成运动控制器的精确插补功能和外围电路的扩展,系统总体框图如图1所示。 运动控制器的主要功能包括:4路模拟电压输出,电压围为-10~+10V,分辨率为16b;4路脉冲量信号输出;4路脉冲方向信号输出;4路驱动复位信号输出;4路驱动使能信号输出;4路差分编码信号输入;4路驱动报警信号输入;8路正负限位信号输入;4路原点信号输入;16路通用数字量。I/O。 2 DSP模块设计 DSP根据从上位机接收的运动模式和运动参数实时计算规划位置和规划速度,生成所需的速度曲线,实时的输出规划位置。TMS320F2812是TI推出的一款专门用于电机控制的32位定点DSP芯片,采用高性能静态CMOS技术,主频高达150MHz(指令周期6.67ns),低功耗,核心电压为1.8V,I/O电压3.3V,支持JTAG边界扫描,128K×16b的片FLASH。有两个事件管理器(EVA和EVB),它们都是特定的外围设备,为多轴运动控制器而设计的。可通过外部存储器接口XINTF扩展外部存储器。DSP外围模块设计如图2所示。
维宏维鸿四轴真四轴联动雕刻机运动控制卡说明书 1.1 维鸿系统的安装 在安装新的维鸿前~请删除旧版本的维鸿。删除的方法请参考程序卸载一节。维鸿系统包括软件和运动控制卡两部分。所以~系统的安装也分为两个阶段: 软件安装和运动控制卡的安装。 总体上~请您在安装完软件之后再安装运动控制卡~这样运动控制卡的驱动程序就不需要单独安装。所以简单以说~可以分为这样几个步骤: (1) 安装维鸿软件~待安装程序提示关闭计算机后~关闭计算机。 (2) 关闭计算机后~安装运动控制卡。 (3) 重新启动计算机~进入Windows操作系统后~略微等待一会~待Windows 自动完成配置~整个安装工作就算完成了。 (4) 运行维鸿系统。 下面详细介绍其中的关键步骤。 维鸿软件安装 请按照下面的步骤安装软件: (1) 打开计算机电源~启动计算机~系统自动运行进入Windows操作系统。 如果你还没有安装Windows操作系统~请首先安装该操作系统。 (2) Windows 操作系统启动后~注意请关闭其他正在运行的程序。 (3) 解压维鸿V2.0免安装包,打开里面的dotNetFrameWork文件夹~安装 dotNetFx40_Full_x86_x64.exe (4) 打开维鸿V2.0文件夹~右键创建桌面快 捷方式
(5) 双击打开桌面快捷键方式~运行维鸿。 维鸿软件驱动安装 USB设备驱动支持XP、win7或win8等32位操作系统~任何一个小的错误都有可能安装驱动失败。 1. 将USB数据线连接到电脑任意USB接口~若出现新硬件向导信息提示中选“是~仅这一次,I,”选项~点击“下一步”。在出现新硬件向导信息提示中选“从列表或指定位置安装,高级,”选项~点击“下一步”。 2. 选择“在搜索中包括这个位置,O,”选项~点击“浏览”。
运动控制卡是一种基于PC机及工业PC机、用于各种运动控制场合(包括位移、速度、加速度等)的上位控制单元。 运动控制卡是基于PC总线,利用高性能微处理器(如DSP)及大规模可编程器件实现多个伺服电机的多轴协调控制的一种高性能的步进/伺服电机运动控制卡,包括脉冲输出、脉冲计数、数字输入、数字输出、D/A输出等功能,它可以发出连续的、高频率的脉冲串,通过改变发出脉冲的频率来控制电机的速度,改变发出脉冲的数量来控制电机的位置,它的脉冲输出模式包括脉冲/方向、脉冲/脉冲方式。脉冲计数可用于编码器的位置反馈,提供机器准确的位置,纠正传动过程中产生的误差。数字输入/输出点可用于限位、原点开关等。库函数包括S型、T型加速,直线插补和圆弧插补,多轴联动函数等。产品广泛应用于工业自动化控制领域中需要精确定位、定长的位置控制系统和基于PC的NC控制系统。具体就是将实现运动控制的底层软件和硬件集成在一起,使其具有伺服电机控制所需的各种速度、位置控制功能,这些功能能通过计算机方便地调用。现国内外运动控制卡公司有美国的GALIL、PAMAC,英国的翠欧,台湾的台达、凌华、研华,国内的雷赛、固高、乐创、众为兴等。 运动控制卡的出现主要是因为: (1)为了满足新型数控系统的标准化、柔性、开放性等要求; (2)在各种工业设备(如包装机械、印刷机械等)、国防装备(如跟踪定位系统等)、智能医疗装置等设备的自动化控制系统研制和改造中,急需一个运动控制模块的硬件平台; (3)PC机在各种工业现场的广泛应用,也促使配备相应的控制卡以充分发挥PC机的强大功能。 运动控制卡通常采用专业运动控制芯片或高速DSP作为运动控制核心,大多用于控制步进电机或伺服电机。一般地,运动控制卡与PC机构成主从式控制结
运动控制芯片 目录 运动控制芯片 (1) 1、两轴运动控制芯片MCX302 (2) 2、四轴运动控制芯片MCX304 (3) 3、两轴运动控制芯片MCX312 (3) 4、四轴运动控制芯片MCX314As (4) 5、四轴运动控制芯片3.3V低功耗MCX314AL (4)
2、四轴运动控制芯片MCX304 *同时4轴控制 *运转时不占用CPU时间 *包括编码器回授介面 *最高输出频率4MP PS *封装:QFP、100pin(14.0×20.0mm)、脚距:0.65mm 无铅 *最外形:23.8x17.8x3.05mm (内尺寸14.0mm×20.0mm×2.7mm) ●4轴独立控制 ●驱动速度:1PPS~4MPPS ●温度范围:0-83度工作电压:+5±5% ●速度曲线:定速、台形、抛物线、S形 ●自动原点输出(新功能)。原点输出动作在IC内部实现自动化,节省了原点输出动作的程序花费的时间。 ●内藏输入信号用积分型噪音过滤器。以前,超载限制、EMG、通用输入信号等,为了除去噪音,IC外必须有另外的CR过滤电路,但因为此机能不须外带部件,且减低消耗,另外也实现了搭载基板的小型化。 ●非对称加减速台形的自动减速机能。 ●即使是加速度与减速度的值不同的台形驱动也可自动减速,最适合垂直上下动作 3、两轴运动控制芯片MCX312 MCX312是一款能够同时控制2个伺服马达或步进马达的运动控制芯片。它以脉冲串形式输出,能对伺服马达或步进马达进行位置控制、插补驱动、速度控制等。在对第一个节点运动实行插补时, 可对第二节点运动连续写入数据。在这个过程中插补动作是连续运行, 而不需要中间作任何停顿 ◆控制轴独立2轴 ◆CPU数据总线长度可选8位/16位 ◆2轴直线插补 插补范围各个轴-8388607~+8388607 插补速度 1~4MPPS 插补位置精密度±0.5LSB以下(在全插补范围内) ◆圆弧插补 插补范围各个轴-8388607~+8388607 插补速度 1~4MPPS 插补位置精密度±1LSB以下(在全插补范围内) ◆2轴位模式插补 插补速度 1~4MPPS(但依靠CPU数据设定时间) ◆其他插补功能 ◆电气的特性 动作温度范围 0~85℃ 动作电源电压+5V±5% (标准28mA,50mA max)
基于VC++的运动控制卡软件系统设计 在自动控制领域,基于PC和运动控制卡的伺服系统正演绎着一场工业自动化的革命。目前,常用的多轴控制系统主要分为3大块:基于PLC的多轴定位控制系统,基于PC_based的多轴控制系统和基于总线的多轴控制系统。由于PC 机在各种工业现场的广泛运动,先进控制理论和DSP技术实现手段的并行发展,各种工业设备的研制和改造中急需一个运动控制模块的硬件平台,以及为了满足新型数控系统的标准化、柔性化、开放性等要求,使得基于PC和运动控制卡的伺服系统备受青睐。本文主要是利用VC++6.0提供的MFC应用程序开发平台探索研究平面2-DOF四分之过驱动并联机构的运动控制系统的软件开发。 平面2-DOF四分之过驱动并联机构的控制系统组成 并联机构的本体如图1,该机构由4个分支链组成,每条支链的一段与驱动电动机相连,而另一端相交于同一点。该并联机构的操作末端有2个自由度(即X 方向和Y方向的平动),驱动输入数目为4,从而组成过驱动并联机构。 控制系统的硬件主要有4部分组成:PC机,四轴运动控制卡,伺服驱动器和直流电动机。系统选用的是普通PC机,固高公司的GT-400-SV-PCI运动控制卡,瑞士Maxon公司的四象限直流伺服驱动器及直流永磁电动机。伺服驱动器型号为4-Q-DCADS50/5,与驱动器适配直流电动机型号为Maxon RE-35。运动控制系统的
构成如图2所示。上位控制单元由PC机和运动控制卡一起组成,板卡插在PC机主板上的PCI插槽内。PC机主要负责信息流和数据流的管理,以及从运动控制卡读取位置数据,并经过计算后将控制指令发给运动控制卡。驱动器控制模式采用编码器速度控制,驱动器接受到运动控制卡发出的模拟电压,通过内部的PWM电路控制直流电动机RE-35的运转,并接受直流电动机RE-35上的编码器反馈信号调整对电动机的控制,如此构成一个半闭环的直流伺服控制系统。 1.1 GT-400-SV控制卡介绍 固高公司生产的GT系列运动控制卡GT-400-SV-PCI可以同步控制4个轴,实现多轴协调运动。其核心由ADSP2181数字信号处理器和FPGA组成,能实现高性能的控制计算。控制卡同时提供了C语言函数库和Windows下的动态链接库,可实现复杂的控制功能。主要功能如下: (1) PCI总线,即插即用; (2)可编程伺服采样周期,4轴最小插补周期为200us,单轴点位运动最小控制周期为25us; (3) 4路16位分辨率模拟电压输出信号或脉冲输出信号模拟量输出范围:-10V-+10V,每路课独立控制,互不影响;
ACS多轴运动控制系统应用 为了满足当今半导体产业的最高的多轴自动化应用的需求,工程师们转而朝向把最好的集成和基于网络的控制属性的运动控制平台方向。许多先进机器的控制平台,即基于网络和集中控制开始看到从自动化领域里广泛的实践,因为它们需要大量的处理能力和通信带宽,这在几年前微处理器和网络技术是无法实现的。在高端多轴自动化行业很多人知道,从20 世纪90 年代以来的集中式多轴控制器的好处。使用中央高速处理器,处理协调多轴运动控制已被证明为确定性数字伺服控制的有效架构,使最快的更新率和精密的同步。 另外,网络结构,如CANopen 网络的,已经成功地实践在了太阳能电池板划线,半导体制造和通用自动化应用中等需要可扩展性,开放的多厂商和设备,对成本控制敏感的系统设计中的运动控制领域。网络标准也一直在不断发展,并且不断提高的带宽和可靠性。现在,随着基于以太网的实时工业网络,如EtherCAT 技术–决定性的实时工业网络具有足够的带宽以支持高性能协调很多个运动控制轴和I / O,是有可能的实现机器控制控制解决方案,他具有集中式和基于网络控制的最佳品质。下面是三个最近需要高度的协调和精确的多轴运动控制案例,每一个展现着对控制系统的独特的挑战和极限。1。太阳能电池板划线和光学检测设备扁平面板和薄片的激光划线经常需要用到极其高性能的运动控制,包括高的速度和加速度,高度协调的多轴激光路径,晶圆检查和及其最小的运动误差最大化光伏(PV)的晶圆密度或解决最小的缺陷。大尺寸面板占用面积超过一平方米以上;而且,由于面板增加的尺寸的规模,导致的机器设备的复杂性和多轴数和运动的性能和功率的需求。最近,太阳能面板板划线设备和检测设备的制造商在设计一条15 轴的生产线的控制系统是遇到了很多挑战。有些版本的机器还使用了其他辅助轴和I / O 设备。一个集中
摘要 步进电机是将电脉冲信号转变成角位移的执行机构,其转速、停止位置只与脉 冲信号的频率和脉冲数有关,具有误差小,易控制等特点,广泛应用于机械、电子、 纺织、化工、石油等行业。尤其是在医疗行业中,比如在X 光扫描方面,都会用到 电机,步进电机的优点使其成为医疗行业里最为适用的电机。本设计中的多轴控制 系统可以运用在X 光扫描仪等多种仪器上。 本设计选用STC89C55RD+型单片机作为核心控制单元,实现M35SP-7 型步进电机的多轴运动控制,并通过RS232 串口实现与上位PC 机通讯功能。设计中运用单 片机软件编程方式实现步进电机环形分配器功能,用P1.0 口、P1.1 口、P1.2 口和 P1.3 口分别控制四相步进电机的A 相、B 相、C 相和D 相绕组的通电顺序,软件上采用查表方法实现单双八拍工作方式环形脉冲分配。步进电机驱动部分采用 ULN2003A 驱动芯片,实现功率放大,驱动步进电机。最后使用Proteus 软件绘制 了单片机控制步进电机多轴运动的原理图。上述设计经实验验证是有效可行的。 关键词单片机,步进电机,多轴运动,串口通讯
Abstract Stepper motor is an implementing mechanism that convert the electronic pulse into angle displacement.Its speed and the stop position only about the frequency and pulse several of the pulse signal,its characteristics are minor error,easy to control and so on,it is widely applied to mechanical, electronic, textile, chemical, oil, etc. Especially in the medical industry,such as an x-ray scanning,need motors.Stepper motor's advantages make it become the most suitable medical industry machine.The multi-axis control system in the design can be used on a variety of instruments such as an x-ray scanning. This design choose STC89C55RD + SCM as the core of the control unit,to realize M35SP-7 type stepper motor's multi-axis control,and use RS232 serial to realize PC communication function.This design use SCM software programming realize stepper motor circular distribution function,P1.0, P1.1, P1.2 and P1.3 respectively controlling A, B, C and D phases' electricity order on the four phase step motor's.Software is used on look-up table method teak eight single working way circular pulse distribution.This design use ULN2003A realize power amplifier to drive stepper motor.Finally using Proteus to draw the principle diagram of the SCM control stepper motor multi-axis motion.The above design experiments showed is effective and feasible. Keywords:SCM, Stepper Motor, Multi-axis motion, serial communication
KeMotion控制系统及开发 KeMotion r5000系列控制器是一套完整的面向多轴运动控制系统软硬件模块化控制器。硬件包括由Keba公司设计的KeMotion控制器,以及各种外围模块组成,它们通过以太网或总线的形式与控制器连接,实现面向各种应用的搭配。软件方面,Keba公司也提供了一套完整的用户操作、诊断、开发工具等软件工具集。Keba公司提供的机器人控制系统解决方案的架构可以如下图0-1所示。 图0-1 系统架构 一、KeMotion系统硬件结构 Keba公司的KeMotion控制器是一套包含了完整软硬件的运动控制系统,如下图1-1所示。
图1-1 KeMotion控制器结构 焊接机器人所使用的几个主要的模块如下所述: 图1-2 CPU模块 CPU:CPU部分是系统的核心目前焊接机器人使用的是KeMotion r5000系列的CP252/X CPU 模块(如图1-2,使用的是定制的基于Intel x86嵌入式微处理器),其上运行的是VxWorks实时操作系统。控制器带有CF卡,OS和应用软件以及系统的数据都存在里面。系统中同时安装了RC机器人控制系统和软PLC控制系统两套软件。它们同时运行,通过共享内存块的方式进行
通信。RC部分负责运动控制,软PLC部分负责电气逻辑和实时外部信号采样处理工作,通过与RC通信,还可以扩展成为系统的主控部分,对运动控制过程进行控制。 KeDrive D2 伺服驱动器:通过SERCOS III总线与控制器连接,系统采用的I/O模块是FX271/A SERCOS III 接口模块。每个单元都可以独立控制伺服,包括位置、速度、加速度和电流的控制。 Ketop示教器 手持终端(KeTop示教器,图1-4):其上运行的是基于WinCE的嵌入式系统,通过以太网与控制器连接通信,在局域网内有自己的IP,相当于一个独立的终端,由于是基于OS的所以可以使用路由连接,提供对TCP等协议的支持。可以通过手持终端连接至控制器控制系统的运动,作为机器人操作手持设备,可以编写终端用户程序,对机器人示教操作、手动操作,监视运动状态。 系统扩展 扩展I/O模块:由于KeMotion控制系统采用的是模块化的方式构建,所以可以方便的外扩I/O模块进行功能扩展,提供插槽式的K-BUS连接。其中可以扩展支持各种总线(CAN、Sercos、Profibus)的模块,以及模拟量或者数字量的输入输出模块,如图1-5所示。 现在的Kemotion r5000控制系统的扩展I/O配置如下: CP252/X CPU module; DM272/A Digital Input / Output Module; DO272/A Digital Output Module; FX271/A SERCOS III Interface Module; AM280/A Analog Input/Output; PC:通过以太网和控制器连接在同一局域网内,可以登录到控制器系统内部修改系统文件;可以模拟手持终端控制控制系统,但在同一时刻只有一个人具有修改终端用户程序的权限;通过编辑程序的应用程序连接正在运行的控制器,调试、仿真程序;通过PC机上编写的OPC客户端连接控制器提供的OPC服务器,读写数据,实现控制。可见,控制调试方法多样,满足各种需求,方便扩展。