移动物体检测与跟踪算法的实现
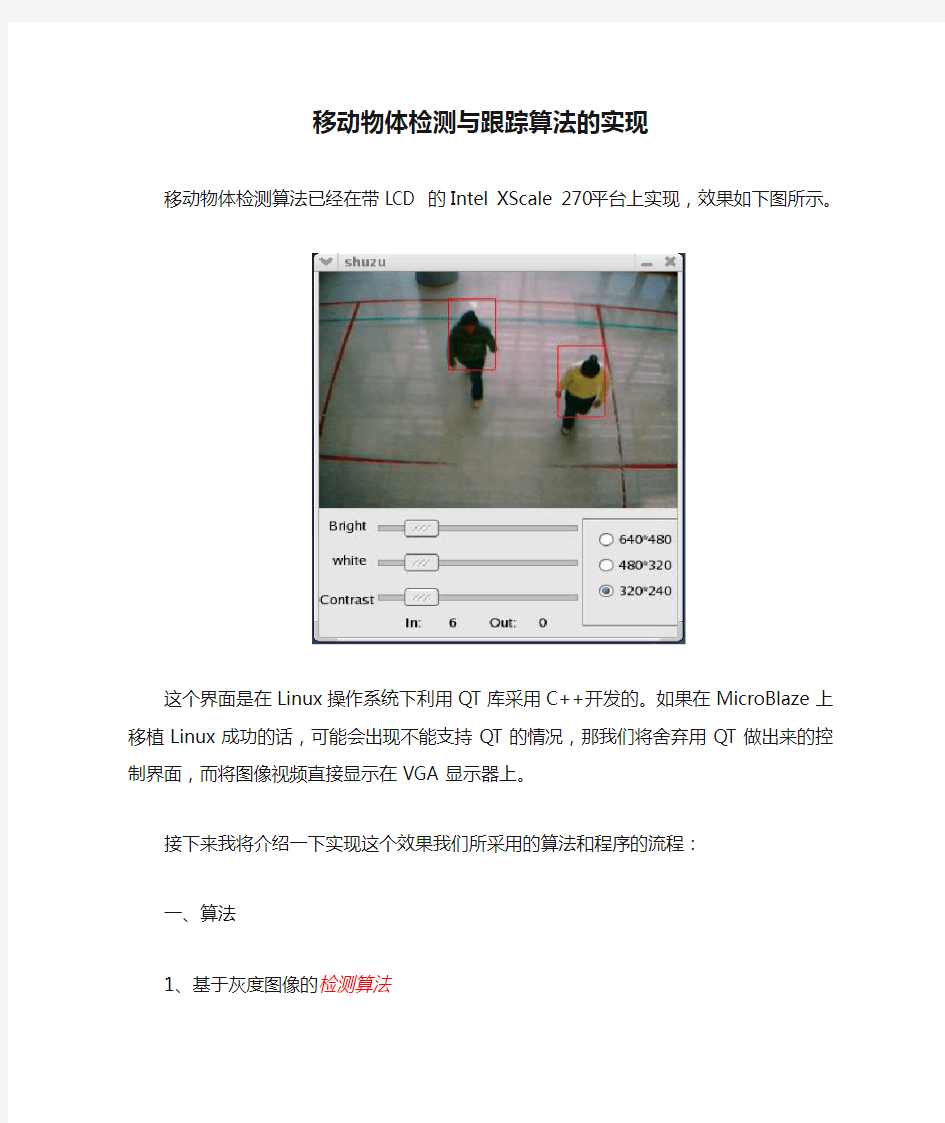
移动物体检测算法已经在带LCD 的Intel XScale 270平台上实现,效果如下图所示。
这个界面是在Linux操作系统下利用QT库采用C++开发的。如果在MicroBlaze上移植Linux成功的话,可能会出现不能支持QT的情况,那我们将舍弃用QT做出来的控制界面,而将图像视频直接显示在VGA显示器上。
接下来我将介绍一下实现这个效果我们所采用的算法和程序的流程:
一、算法
1、基于灰度图像的检测算法
为了完成实时目标检测,需要一系列的操作,所以就需要对目标的特征进行提取,包括目标的形状和颜色分布。由于人体是非刚性的,外在的障碍物和自身的噪声可能给建立唯一的模型带来困难。为了减小这些影响我们把摄像头观察点放置在人群的正上方,这样几乎不会有重叠的现象而且每个目标占用图像的面积很小。
我们采用基于灰度直方图的方法简化目标模型,由于系统只需识别出有物体的存在并进行跟踪,所以要求的精度不需要很高,因此在该系统只识别人体的大体外形及所处的位置而忽略身体的细节部分,使算法更加简化。为了突出目标本文采用相邻帧差法去除不变的部分(比如背景、身体的一些部分),通过分析剩下的部分我们可以定位目标所在的位置。简单的帧差法并不足以达到检测的精度,这里采用相差后图像的水平和垂直投影完成检测功能。
下面给出这个算法的过程:
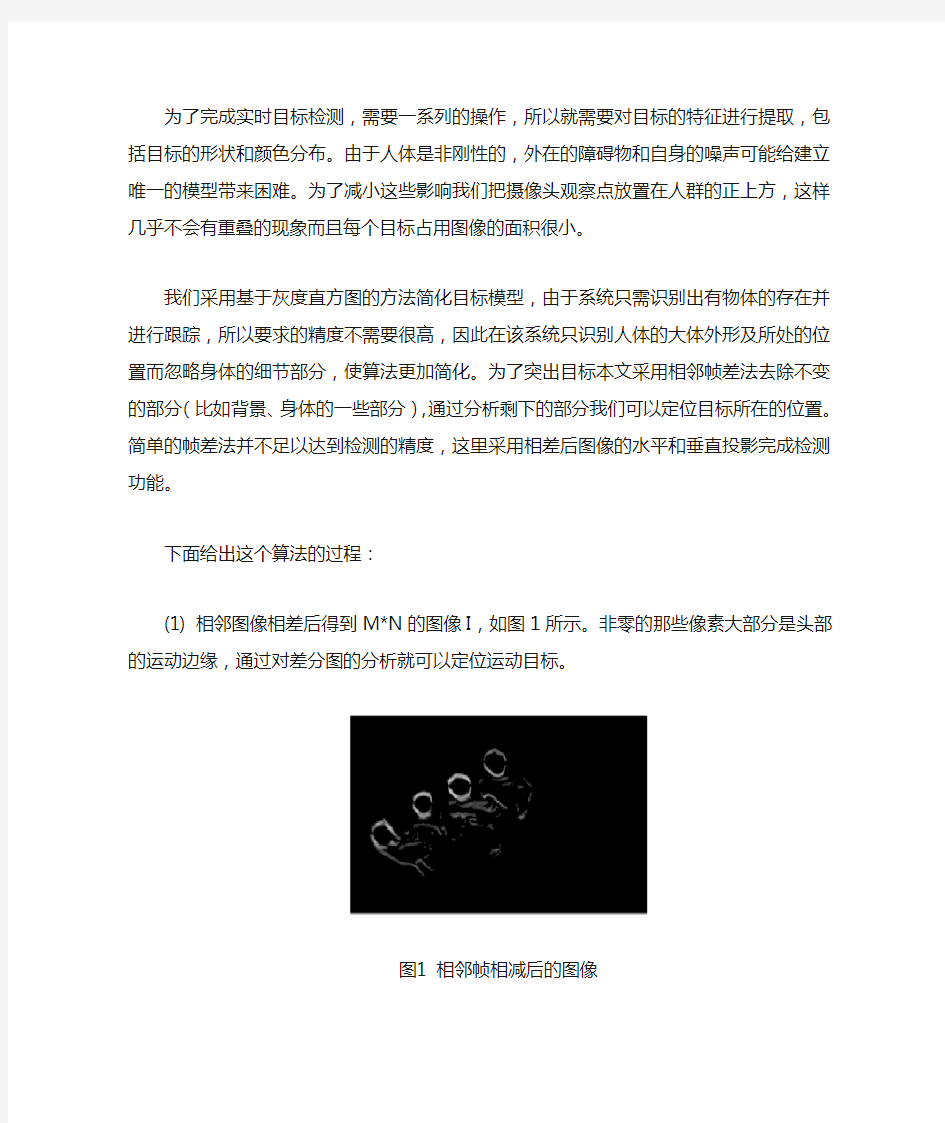
(1) 相邻图像相差后得到M*N的图像I,如图1所示。非零的那些像素大部分是头部的运动边缘,通过对差分图的分析就可以定位运动目标。
图1 相邻帧相减后的图像
(2) 求出差分图像I 的水平及垂直投影分别用H 和V 表示。如图2显示了两相邻帧和差分后的水平投影值的分布。
水平投影的计算如下:
1()(,)N j V i I i j ==∑ 1,2,....
,i N = (1)
图2 两相邻帧以及差分后的水平投影
从图中可以很明显地看出,在人体头部周围跟随两个峰值。这里我们利用这个特征来检测定位目标。为了最小化噪声的扰动和摄像机抖动的影响我们采用对V 进行中值滤波来保持边缘并滤除孤立脉冲噪声和胡椒噪声。
(3) 如果运动物体存在,那么在向量V 中肯定存在具有足够多的灰度值大于分割阈值的像素点的段。我们将图像I 分成n 个域(n 就是段数),每一个域都位于相应段的中心并且具有一定的宽度。那么这就检测出具有n 个运动目标。
(4) 假设每个域有一组纵向目标。对每个域进行水平投影得到(1,2,3,...,)i H i n =然后进行中值滤波,如果在第i 个域中存在m 个目标,那么在i H 中一定具有m 个显著的值(峰值)。再进行中值滤波并且利用另外一个阈值将域中的一组目标分割开。这样就得
图3 目标分割
到了当前帧中可能的目标的坐标值,然后用外接矩形画出运动目标的边界,如图3所示。
以上使用的阈值具有很大的范围,但是它们的成分大体是固定的。通过系统训练和结果分析我们发现了阈值T 和图象的平均灰度值之间具有如图4所示的关系。因此,系统引进通过连续帧的平均灰度值表述的阈值自适应模型。
图4 阈值与平均灰度值的关系
2、基于一个新的评价函数的跟踪算法
在图像帧中可能发生目标的出现和消失,这就需要将最近检测到的目标和以前检测过的目标进行匹配。基于模板匹配的算法被广泛采用但是它们的搜索空间会随图像大小和模板的增大而急剧增大。所以较难达到实时处理的目的,而且也不可能在人群中提取到所有的模板。这里采用一种新的基于颜色直方图的算法,认为同一物体的直方图是在帧间是相对不变的。但是这种方法忽视了自身的误差,因此还需要做相应地处理来尽可能减小误差的影响。
该系统采用改进的一种新的评估函数来解决匹配问题。此算法将最近相邻算法、速度相关性和单一化灰度直方图结合在一起。
由于帧间的时间间隔很短,所以人体特征如质心、边界矩形和速度不会发生突然地变化,在实验中我们得到了质心位移的上限λ。假设,x y V V 分别表示某物体水平方向和垂直方向的速度,那么用[,],[,]T T cx cy sx sy Vc v v Vs v v ==分别表示在第K 帧的第C 个目标和第K+1帧的第S 个目标。两向量规格化的关系(,,)c s R k V V 定义为
(,,),/(||||||||)c s c s c s R k V V V V V V =<> (2)
其中,Vc Vs <>表示内积,,T cx sx cy sy Vc Vs Vc Vs v v v v <>=?=?+?。||||c V 、||||s V 分别表示向量,Vc Vs 的模。
根据施瓦兹不等式有0(,,)1c s R k V V ≤≤。
帧间物体的彩色直方图相对稳定而且在检测处理过程中本文关注的是加了边界的那些区域,然后计算它们的灰度直方图。这里关心的是所有灰度值的一小部分而其中的大部分都不关心,于是为减轻处理的负担简化后的直方图H 是必须的。
这里采用了第K 帧的第C 个目标和第K+1帧的第S 个目标灰度直方图的相似度计算,匹配程度的计算公式如下:
00(,,)min((),())/()w w s c c
i i G k S C H i H i H i ===∑∑ (3)
设d(C,S)表示它们之间的欧几里得距离,建立一个新的评价函数如下:
(,,)(,,)(,,)(1)min((,))/(,)F k S C R k S C G k S C d i j d S C αβαβ=?+?+--? (4) 其中(,)d i j 表示两帧间任意两目标之间的欧几里得距离,,αβ的取值都在0到1之间。这样就将三个重要特征联合在一起作为匹配规则对运动目标进行跟踪。下面给出跟踪算法的流程:
(1) 所有在第一帧中出现的目标都标记为新目标,并且为了以后的匹配为每个目标建立一条空链。
(2) 当接收到第k 帧图像时,计算当前帧第j 个可能目标(1j m ≤≤,m 表示当前帧中出现的目标数)和以前检测过的第i 个目标(1i n ≤≤,n 表示以前检测过的总的目标数)之间的G(k,S,C)和(,)d i j 。
① 如果第j 个可能目标具有最大的G(k,S,C)且满足(,)d i j λ≤,就把这个目标认为时第i 个目标的后续,它们属于同一个物体,并且将它添加到相应的链中同时标记为已匹配。
② 如果所有以往检测到的目标都满足(,)d i j λ>,那么就认为第i 个目标在第k 帧没有后续。这暗示这个目标已经在视窗范围之外或者暂时静止不动。如果链的长度超过给定的值就进行一次统计。
被噪声淹没的目标即使在视窗范围内可能也会检测不到,但我们不能停止对它的跟踪,这里我们采用名为“等待N 帧重新匹配”的算法:如果在当前帧没有发现以前检测到的目标,我们不立即将它丢弃,接着处理接下来的N 帧,如果该目标在接下来的N 帧中都没有检测到,那么就放弃对它的跟踪,并且清除相应的链表同时进行计数,否则,恢复跟踪处理。
(3) 如果所有的目标都匹配并且都做过已匹配标记,意味着所有可能的目标都和以前检测到的目标有联系。如果存在没有做过已匹配标记的目标,那么为该目标新建一条空链。
(4) 接收第K+1帧图像,重复第(2)(3)步,直到图像采集结束。
二、 程序流程
(1) 系统类图
系统实现由前台界面显示、后台的图像处理、目标检测和跟踪计数部分组成,完成这一系统本文定义了MainWin 、Process 、Tracker 、Target 四个类:
①MainWin 类:如图5所示,该类利用Qt 图形库绘制主界面,在控件img(QImage)上实时显示处理后的视频。主界面如下图所示。Qt 中消息映射是通过“消息—槽”的机制实现,在这里时间信号每50毫秒触发timeoutslot() 函数,timeoutslot 调用Process 的InputNewFrame 方法检测和跟踪目标,也就是说每秒处理20帧图像。主界面的布局如图4
所示。
图5 MainWin 类 图6 Process 类
②Process 类:如图6所示,该类实现图像处理和目标检测。目标检测的核心算法在ProcessNewFrame()方法中实现,主要包括相邻帧作差、计算水平方向和垂直方向的阈值、分割并标记目标等操作。
③Tracker
类:如图7所示,该类实现了对运动目标的跟踪和计数。目标跟踪的核心算法在InputNewPosition()方法中实现,主要包括计算距离、判别新目标等操作。
图7 Tracker 类 图8 Target 类 ④Target 类:如图8所示,该类主要是描述图像中的运动目标的属性、判别目标是否消失等操作。
(2) 程序流程与框架
系统采用C++语言实现,程序的流程与框架及调用过程如图9所示。图中给出了系统实现的每个类中的函数执行过程。
①MainWin 类执行摄像头初始化,绘制图形界面,从摄像头中读取图像帧交给Process 类进行处理,然后将处理后的结果绘制出来。
②Process 类执行RGB 图转换成灰度图之后,计算算法中说明的动态阈值,根据水平和垂直的阈值计算出目标的个数和所处的位置,然后用红色矩形框进行标记,登记存在的Target ,然后交给Tracker 类进行跟踪部分的分析计算。返回后将最终识别和跟踪的结果返回给MainWin 类进行显示。
③Tracker 类执行目标的跟踪,首先分析目标是否为新目标或者是在前帧中存在而在当前帧中继续移动的目标(Target),然后分别对不同的分析结果执行相应的操作。进而进行计数统计,将跟踪和计数的结果返回给Process 。
图9 系统程序流程
第九章图像目标探测与跟踪技术 主讲人:赵丹培 宇航学院图像处理中心 zhaodanpei@https://www.doczj.com/doc/329659824.html, 电话:82339972
目录 9.1 概论 9.2 目标检测与跟踪技术的发展现状9.3 目标检测与跟踪技术的典型应用9.4 图像的特征与描述 9.5 目标检测方法的基本概念与原理9.6 目标跟踪方法涉及的基本问题
9.1 概论 1、课程的学习目的 学习和掌握目标探测、跟踪与识别的基本概念和术语,了解一个完整信息处理系统的工作流程,了解目标探测、跟踪与识别在武器系统、航空航天、军事领域的典型应用。了解目标检测、跟踪与识别涉及的关键技术的发展现状,为今后从事相关的研究工作奠定基础。 2、主要参考书: 《目标探测与识别》,周立伟等编著,北京理工大学出版社; 《成像自动目标识别》,张天序著,湖北科学技术出版社; 《动态图像分析》,李智勇沈振康等著,国防工业出版社;
引言:学习目标检测与跟踪技术的意义 ?现代军事理论认为,掌握高科技将成为现代战争取胜的重要因素。以侦察监视技术、通信技术、成像跟踪技术、精确制导技术等为代表的军用高科技技术是夺取胜利的重要武器。 ?成像跟踪技术是为了在战争中更精确、及时地识别敌方目标,有效地跟踪目标,是高科技武器系统中的至关重要的核心技术。 ?例如:一个完整的军事战斗任务大致包括侦察、搜索、监视以及攻击目标和毁伤目标。那么快速的信息获取和处理能力就是战争胜利的关键,因此,目标的实时探测、跟踪与识别也成为必要的前提条件。
?随着现代高新技术的不断发展及其在军事应用领域中的日益推广,传统的作战形态正在发生着深刻的变化。 1973年的第四次中东战争,1982年的英阿马岛之战,1991年的海湾战争及1999年的科索沃战争,伊拉克战争等都说明了这一点。西方各军事强国都在积极探索对抗武器,特别是美国更是投入了巨大的物力、人力和财力积极研制弹道导弹防御系统。而图像检测、跟踪和识别算法作为现代战场信息环境作战成败的关键,具备抗遮挡、抗丢失和抗机动鲁棒性的智能跟踪器,将是现代战场作战必备品,具有广泛的应用前景。
人体目标检测与跟踪算法研究 摘要:近些年以来,基于视频中人体目标的检测与跟踪技术研究越来越被重视。然而,由于受到目标自身特征多样性和目标所处环境的复杂性和不确定性的影响,现存算法的性能受到很大的限制。本文对目前所存在的问题进行了分析,并提出了三帧差分法和改进阈值分割法相结合的运动目标检测算法和多特征融合的改进运动目标跟踪算法。这两种算法不仅可以准确有效的检测出运动目标而且能够满足实时性的要求,有效的解决了因光照变化和目标遮挡等情况造成的运动目标跟踪准确度下降或跟踪目标丢失等问题。 关键词:三帧差分,Camshift,阈值分割 Research Based on Human Target Detectionand Tracking Algorithm Abstract: In recent years, human object detection and tracking become more and more important. However the complexity, uncertainty environment and the target’s own diversity limit the performance of existing algorithms. The main works of this paper is to study and analysis the main algorithm of the human object detection and tracking, and proposes a new moving target detection method based on three-frame difference method and threshold segmentation and improved Camshift tracking algorithm based on multi-feature fusion. These algorithm can satisfy the real-time, while accurately and efficiently detect moving targets, and also effectively solves the problem of tracking object lost or misplaced under illumination change or target occlusion. Keywords: three-frame difference, Camshift, threshold segmentation 一、绪论 (一)选题的背景和意义 人类和动物主要通过眼睛来感受和认知外部世界。人类通过视觉所获取的信息占了60%[1],因此,在开发和完善人工智能的过程中,赋予机器视觉的功能这一操作极不可缺少。完善上述功能需要以许多技术为基础,特别是运动目标的检测与跟踪技术。近些年以来,此技术受到了越来越多的关注[2]。目前,此技术也在各领域得到了充分的应用,涵盖的领域有智能交通、导航、智能视频监控、精确制导、人机交互和多媒体视频编码压缩技术等。
移动物体检测与跟踪算法的实现 移动物体检测算法已经在带LCD 的Intel XScale 270平台上实现,效果如下图所示。 这个界面是在Linux操作系统下利用QT库采用C++开发的。如果在MicroBlaze上移植Linux成功的话,可能会出现不能支持QT的情况,那我们将舍弃用QT做出来的控制界面,而将图像视频直接显示在VGA显示器上。 接下来我将介绍一下实现这个效果我们所采用的算法和程序的流程: 一、算法 1、基于灰度图像的检测算法 为了完成实时目标检测,需要一系列的操作,所以就需要对目标的特征进行提取,包括目标的形状和颜色分布。由于人体是非刚性的,外在的障碍物和自身的噪声可能给建立唯一的模型带来困难。为了减小这些影响我们把摄像头观察点放置在人群的正上方,这样几乎不会有重叠的现象而且每个目标占用图像的面积很小。 我们采用基于灰度直方图的方法简化目标模型,由于系统只需识别出有物体的存在并进行跟踪,所以要求的精度不需要很高,因此在该系统只识别人体的大体外形及所处的位置而忽略身体的细节部分,使算法更加简化。为了突出目标本文采用相邻帧差法去除不变的部分(比如背景、身体的一些部分),通过分析剩下的部分我们可以定位目标所在的位置。简单的帧差法并不足以达到检测的精度,这里采用相差后图像的水平和垂直投影完成检测功能。 下面给出这个算法的过程: (1) 相邻图像相差后得到M*N的图像I,如图1所示。非零的那些像素大部分是头部的运动边缘,通过对差分图的分析就可以定位运动目标。
图1 相邻帧相减后的图像 (2) 求出差分图像I 的水平及垂直投影分别用H 和V 表示。如图2显示了两相邻帧和差分后的水平投影值的分布。 水平投影的计算如下: 1()(,)N j V i I i j ==∑ 1,2,.... ,i N = (1) 图2 两相邻帧以及差分后的水平投影 从图中可以很明显地看出,在人体头部周围跟随两个峰值。这里我们利用这个特征来检测定位目标。为了最小化噪声的扰动和摄像机抖动的影响我们采用对V 进行中值滤波来保持边缘并滤除孤立脉冲噪声和胡椒噪声。 (3) 如果运动物体存在,那么在向量V 中肯定存在具有足够多的灰度值大于分割阈值的像素点的段。我们将图像I 分成n 个域(n 就是段数),每一个域都位于相应段的中心并且具有一定的宽度。那么这就检测出具有n 个运动目标。 (4) 假设每个域有一组纵向目标。对每个域进行水平投影得到(1,2,3,...,)i H i n =然后进行中值滤波,如果在第i 个域中存在m 个目标,那么在i H 中一定具有m 个显著的值(峰值)。再进行中值滤波并且利用另外一个阈值将域中的一组目标分割开。这样就得
基于opencv中光流法的运动 行人目标跟踪与检测 一、课题研究背景及方法 行人检测具有极其广泛的应用:智能辅助驾驶,智能监控,行人分析以及智 能机器人等领域。从2005年以来行人检测进入了一个快速的发展阶段,但是也存在很多问题还有待解决,个人觉得主要还是在性能和速度方面还不能达到一个权衡。 早期以静态图像处理中的分割、边缘提取、运动检测等方法为主。例如 (1)以Gavrila为代表的全局模板方法:基于轮廓的分层匹配算法,构造了将近2500个轮廓模板对行人进行匹配, 从而识别出行人。为了解决模板数量众多而引起的速度下降问题,采用了由粗到细的分层搜索策略以加快搜索速度。另外,匹配的时候通过计算模板与待检测窗口的距离变换来度量两者之间的相似性。 (2)以Broggi为代表的局部模板方法:利用不同大小的二值图像模板来对人头和肩部进行建模,通过将输入图像的边缘图像与该二值模板进行比较从而识别行人,该方法被用到意大利Parma大学开发的ARGO智能车中。 (3)以Lipton为代表的光流检测方法:计算运动区域内的残余光流; (4)以Heisele为代表的运动检测方法:提取行人腿部运动特征; (5)以Wohler为代表的神经网络方法:构建一个自适应时间延迟神经网络来判断是否是人体的运动图片序列; 以上方法,存在速度慢、检测率低、误报率高的特点。 2、行人检测的研究现状
(1)基于背景建模的方法:分割出前景,提取其中的运动目标,然后进一步 提取特征,分类判别;在存在下雨、下雪、刮风、树叶晃动、灯光忽明忽暗等场 合,该方法的鲁棒性不高,抗干扰能力较差。且背景建模方法的模型过于复杂,对 参数较为敏感。 (2)基于统计学习的方法:根据大量训练样本构建行人检测分类器。提取的 特征一般有目标的灰度、边缘、纹理、形状、梯度直方图等信息,分类器包括神经 网络、SVM,adaboost等。该方法存在以下难点: (a)行人的姿态、服饰各不相同; (b)提取的特征在特征空间中的分布不够紧凑; (c)分类器的性能受训练样本的影响较大; (d)离线训练时的负样本无法涵盖所有真实应用场景的情况; 尽管基于统计学习的行人检测方法存在着诸多的缺点,但依然有很多人将注 意力集中于此。 行人检测国外研究情况: 法国研究人员Dalal在2005的CVPR发表的HOG+SVM的行人检测算法(Histograms of Oriented Gradients for Human Detection, Navneet Dalel,Bill Triggs, CVPR2005)。 Dollar 在 2010 年 BMVC 的《The fastest pedestrian detector in the west》一文中提出了一种新的思想,这种思想只需要训练一个标准 model,检测N/K(K ≈10)然后其余的 N-N/K 种大小的图片的特征不需要再进行这种复杂的计算,而是跟据这 N/K 次的结果,由另外一种简单的算法给估计出来,这种思 想实现的基础是大小相近的图像的特征可以被足够精确的估计出来;同年,德国
4.1.跟踪算法的基本流程 在本文的智能视频监控系统中,运动目标跟踪的基本流程如图4.1所示。 主要包括以下几个部分: (1)运动目标检测部分:在视频图像中定位、检测运动目标; (2)建立目标模板部分:根据检测到的目标,提取其特征建立跟踪模板; (3)目标运动预测部分:利用预测算法预测目标可能出现的位置; (4)运动目标跟踪部分:在预测范围内,利用跟踪算法搜索匹配的运动目标; 如果在预测范围内找到与目标模板匹配的目标,则更新该模板;否则建立 一个新的模板。 运动目标检测 图4.1本文的目标跟踪算法结构框图 4.2.Mean Shift算法 Mean Shifl这_个概念最早是有Fukunaga和Hostetle于1975年提出的一种无参嚣;| 一板]l_]一 ~ 一竺竺~~模一皈I| 一 王一目|! 离一 估计算法,其主要思想是沿着概率梯度上升的方向找到分布的峰值,即寻找极 值【61】;1 995年,Yizong Cheng等人定义了一簇核函数,并且设定了权重系数,这大大扩展了该算法的适用范围并使得其逐渐被不同领域所应用;自1 998年开 始,该算法被Bradski应用于人脸跟踪,其在目标跟踪领域的优势显现出来,并 不断被应用在目标跟踪的各个领域中‘621。 在Mean shift算法中非常重的一个概念就是核函数。其定义为:若函数K: 当X—R,存在剖面函数k:【0,叫一R,即式4.1: K(x)=k(㈣x 2) (4.1) 核函数必须是一个非负非增函数,并且是分段连续的,同时满足式4.2: 【k(r)dr 万方数据 万方数据 第2期刘富强。等:一种基于视觉的车道线检测与跟踪算法利用式(2求得的X便是车道线参数模型(1 中的h:.此外,利用消隐点可进行坐标变换,即将图 像坐标系内的点映射到世界坐标系中,这样便可得 到实际场景下的车道线.变换原理L15]如下简述: 如图2,设矩形QABC宽为Ⅳ,长为L,它经过 摄影变换投影为四边形oabc,d为平面oabc上任意 一点,已知0,a,b,e,d摄影变换后的坐标,求d变 换前的对应点D在QABC上的坐标. 由于A B//oc,推出口c与曲的交点秽。即为所 有与AB平行的直线摄影变换后对应的消隐点;同 理,oa与6c的交点口z也是所有与OA平行的直线变 换后对应的消隐点. 根据消隐点可求出Vzd与口6的交点m,即为 D点在All上投影M摄影变换后的对应点;可。d与 伽的交点n,即为D点在OA上的投影Ⅳ的对应点. 图2基于消隐点的坐标变换图示 Fig.2Calibration based On vanishing point 根据交比不变性,有: (诹;栅2=(04;N%(bm;avl=(跚;AVl 可以分别得到: ,、0n×a',2 0N×A V2 ‘0口;n移22二=:l—_==2二==——===2 a n x o',2A』v×0K =O三N:(OA;毗 A N ,.、b a×m l,】BA×M V1 (mn;avl2二==—==三2====_—_===2 m a×b l,1MA x B VI 些:(BM;AV2 朋A 变换得到:一ON:A~N×竺娑 (3 a n×o耽 而:丽×竺些(4 b口×m v1 视频目标检测与跟踪算法综述 1、引言 运动目标的检测与跟踪是机器视觉领域的核心课题之一,目前被广泛应用在 视频编码、智能交通、监控、图像检测等众多领域中。本文针对视频监控图像的运动目标检测与跟踪方法,分析了近些年来国内外的研究工作及最新进展。 2、视频监控图像的运动目标检测方法 运动目标检测的目的是把运动目标从背景图像中分割出来。运动目标的有效分割对于目标分类、跟踪和行为理解等后期处理非常重要。目前运动目标检测算法的难点主要体现在背景的复杂性和目标的复杂性两方面。背景的复杂性主要体现在背景中一些噪声对目标的干扰,目标的复杂性主要体现在目标的运动性、突变性以及所提取目标的非单一性等等。所有这些特点使得运动目标的检测成为一项相当困难的事情。目前常用的运动目标检测算法主要有光流法、帧差法、背景相减法,其中背景减除法是目前最常用的方法。 2.1 帧差法 帧差法主要是利用视频序列中连续两帧间的变化来检测静态场景下的运动目标,假设(,)k f x y 和(1)(,)k f x y +分别为图像序列中的第k 帧和第k+1帧中象素点(x ,y)的象素值,则这两帧图像的差值图像就如公式2-1 所示: 1(1)(,)(,)k k k Diff f x y f x y ++=- (2-1) 2-1式中差值不为0的图像区域代表了由运动目标的运动所经过的区域(背景象素值不变),又因为相邻视频帧间时间间隔很小,目标位置变化也很小,所以运动目标的运动所经过的区域也就代表了当前帧中运动目标所在的区域。利用此原理便可以提取出目标。下图给出了帧差法的基本流程:1、首先利用2-1 式得到第k 帧和第k+1帧的差值图像1k Diff +;2、对所得到的差值图像1k Diff +二值化(如式子2-2 示)得到Qk+1;3、为消除微小噪声的干扰,使得到的运动目标更准确,对1k Q +进行必要的滤波和去噪处理,后处理结果为1k M +。 111255,,(,)0,,(,)k k k if Diff x y T Q if Diff x y T +++>?=?≤? (T 为阈值) (2-2) 运动目标检测与跟踪算法的研究进展 0 引言 人类感知的环境信息大多是通过视觉获得的,而在接受到的所有视觉信息中,人们又往往对动态信息更感兴趣。随着多媒体技术的发展,人们正在接触越来越多的视频信息。一方面,要获得较高压缩比来存储这些信息,另一方面,需要对感兴趣的区域或对象进行操作[1]。因此对视频图像中运动目标的提取、分类识别和跟踪,已成为对运动目标的行为进行理解和描述视频图像中动态信息的主要内容。 运动目标的检测与跟踪在技术上融合了计算机视觉、视频图像处理、模式识别和自动控制等相关领域的知识[2]。运动目标的检测与跟踪是视频技术的一个重要研究方向,其应用十分广泛。在交通流量的监测、安全监控、军事制导、视觉导航,以及视频编码中都有涉及。目前,运动目标的检测与跟踪已经取得了很多成果,并且不断有新技术、新算法涌现。但是,在实际环境中,由于自然环境的复杂(光照、气候的变化等),目标的高机动性,干扰了目标检测与跟踪,造成检测不准确且跟踪效率不高。因此,研究改进运动目标检测与跟踪算法有很现实的意义和应用价值。 1 运动目标检测常用算法 运动目标检测就是从视频图像中将变化的区域从背景中提取出来,此类算法依照目标与摄像机之间的关系可以分为静态背景下运动检测和动态背景下运动检测。静态背景下只有被监视目标在摄像机的视场内运动;而动态背景下摄像机也发生了运动,这个过程就产生了目标与背景之间复杂的相对运动,造成动态背景下的运动检测和跟踪难度很大。目前对于动态背景下运动检测和跟踪的研究较少,因此本文暂不涉及运动背景下的运动目标检测与跟踪。在静态背景下,运动目标检测主要算法有三种:帧间差分法、背景差分法和光流法。下面分别对这三种算法进行分析。 1.1 帧间差分法 帧间差分法[3]的基本原理就是相邻帧的图像对应像素点的灰度值相减,通过差分图像进行二值化处理以确定运动目标。帧间差分法的主要优点是:算法实现简单,程序设计复杂度低;不存在背景的获取、更新和存储的问题;对场景中光线的变化不太敏感,实时性好。但在实际环境中,当目标运动速度过快时,容易产生空洞,也可能把一个运动目标分割为两个或者多个,并且运动目标的获取存在着模糊的边缘。 针对帧间差法存在的问题,人们提出了很多方法改进,如采用三帧差分法、加入颜色信息进行判别等。例如Shahinfard 等提出对相邻5 场的视频序列作差分处理,并且综合视频序列的RGB 分量信号进行运动检测[4]。因此,该方法即适用于高速运动目标,同时也适用于低速目标。针对光线变化的环境,Crnojevic等提出将小波变换加入差分算法中[5],取得了较好的效果。聂?等提出了一种复合差分算法,利用两次差分之间的相关性来检测运动目标,并且将前景像素面积作为判别目标漏检程度的依据,有效的减少了目标漏检[6]。 1.2 光流法 光流是空间运动物体在观测成像面上的像素运动的瞬时速度。物体在光源照射下,其表面的灰度呈现一定的空间分布,称之为灰度模式。当人的眼睛观察运动物体时,物体的景象在人眼的视网膜上形成一系列连续变化的图像称之为光流。光流表达图像的变化,包含目标运动的信息,可用来确定目标的运动。光流算法评估了两幅图像的之间的变形,它假设一个物体的颜色在前后两帧没有巨大而明显的变化。基于这个思路,我们可以得到图像约束方程。不同的光流算法解决了假定了不同附加条件的光流问题。Horn 和Schunck 于1981 年创造性地将二维速度场与灰度相联系,引入光流约束方程,得到光流计算的基本算法[7]。Lucas 和Kanade 同年提出了LK 光流算法[8]。 虽然光流携带了有关物体运动和景物三维结构的丰富信息,在实际应用中,由于遮挡、多光源和噪声等原因,使得光流方程的灰度守恒假设条件得不到满足,不能正确的解出光流场;同时大多数的光流计算方法相当复杂,计算量大,难以实时应用,因此在对实时性要求较高的监控系统中一般并不采用这种算法。因此减少光流算法的运算复杂度是应用光流法的关键。为此,戴斌等人提出了最优估计的点匹配技术和光流均匀采样策 略[9],同时进行运动目标的检测和跟踪,并能在一定程度上解决光流技术中的计算量和信息量的矛盾。为改善HS 算法中最小均方差迭代的最终收 基于光流的运动目标检测跟踪快速算法 关兴来;谢晓竹 【期刊名称】《微计算机信息》 【年(卷),期】2012(000)010 【摘要】Using optical flow algorithm for identification and tracking moving targets, the advantage is the ability to adapt to the com- plex background conditions, and can ensure the integrity of the target partition, but the existing target tracking algorithm based on op- tical flow vector has obvious limitations: excessive operation, and does not apply and movement characteristics of complex targets. Im- provements to existing algorithms, using the pyramid optical flow-based smoothing algorithm and the absolute value of the region seg- mentation algorithm can effectively solve these two problems.%采用光流算法对运动目标进行识别跟踪,其优点是能够适应复杂的背景条件,并且能保证目标分割的完整性,但现有的。按照光流矢量对目标进行跟踪的算法有明显的局限性:运算量过大,并且不适用与运动特征复杂的目标。对现有算法进行改进.采用均值平滑算法和基于光流绝对值的区域分割算法,可以有效解决这两个问题。 【总页数】3页(421-423) 【关键词】光流;运动目标;图像分割 【作者】关兴来;谢晓竹 【作者单位】装甲兵工程学院;装甲兵工程学院一种基于视觉的车道线检测与跟踪算法_图文(精)
视频目标检测与跟踪算法综述
运动目标检测与跟踪算法的研究进展
基于光流的运动目标检测跟踪快速算法
相关主题
文本预览