线控转向系统前轮转角控制策略研究*
杨胜培1,周海军2
【摘要】针对汽车线控转向车辆,以四轮转向车辆模型为基础,将四轮转向车辆的横摆角速度和质心侧偏角作为参照控制目标,研究了线控转向车辆转向传动比在车速以及转向盘转角发生变化时,随车辆转向特性变化而进行优化设置的问题。仿真结果表明,基于参考模型横摆角速度反馈控制方案设置的变传动比控制整体性能最好。
【期刊名称】科技创新与生产力
【年(卷),期】2014(000)005
【总页数】4
【关键词】线控转向;传动比;横摆角速度;反馈控制;参考模型
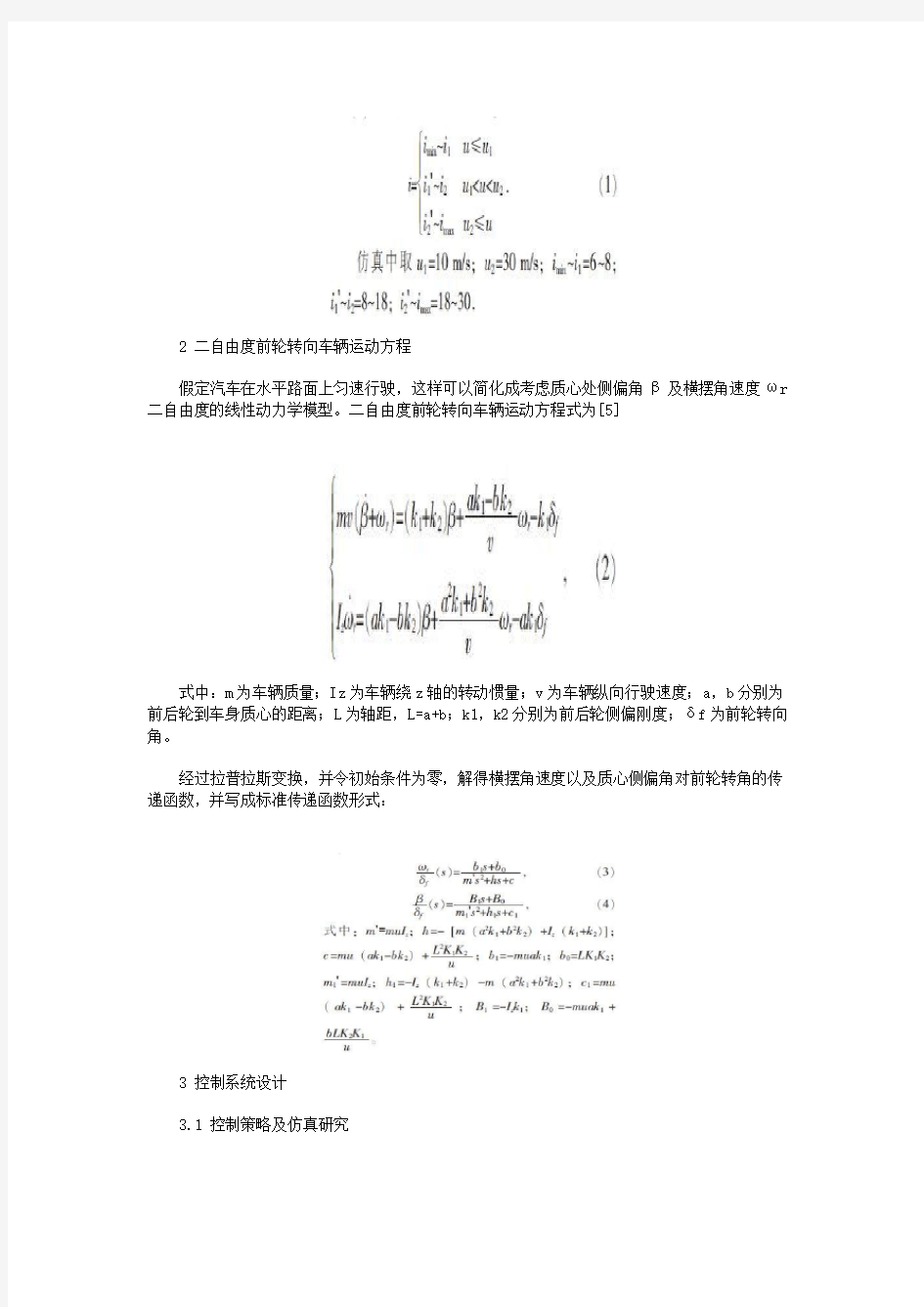
目前,汽车转向系统仍是机械传动,由于机械转向的角传动比固定,转向灵敏度随车速影响变化较大,高速行驶转向灵敏,低速行驶转向困难,增加了驾驶员对车辆特性变化的补偿,提高了驾驶难度。线控转向系统取消了转向盘和转向轮之间的机械连接,转向系统之间的传动比可通过软件自由设定,因此可以解决传统转向系统固定传动比造成的缺陷[1]。
现在对线控转向系统传动比的研究基于系统转向增益[2-3]、参数拟合以及智能控制[4]的研究较多,而基于车辆驾驶转向特性来设计系统转向传动比的研究较少。四轮转向车辆具有质心侧偏角为零的特性而得到了广泛的研究,因此笔者以四轮转向车辆为参考模型,对前轮线控转向车辆的转向特性以及传动比进行研究,提出了基于参考模型横摆角速度和质心侧偏角的反馈控制方案,并以四轮转向车辆参考模型的横摆角速度和质心侧偏角为跟踪目标对线控转向系统的