基于ERDAS航空影像的单片正射纠正
王芳霞
摘要:介绍利用遥感图像处理系统ERDAS IMAGINE对单张航片进行正射纠正的原理、方法,纠正过程中应注意的问题及用此方法生产正射影像的优点和应用前景。
关键词:正射影像纠正遥感影像处理
1引言
随着数字化技术和城市建设的飞速发展,传统的测绘产品已不能满足各个行业高速发展的需要,高分辩率实时性好的数字测绘产品已逐渐替代了原先的传统测绘产品。数字正射影像地图就是其中一种重要的产品,所谓正射影像,指改正了因地形起伏和传感器误差而引起的像点位移的影像。数字正射影像不仅精度高,信息丰富,直观真实,而且数据结构简单,生产周期短,能很好的满足社会各行业的需要。利用摄影测量的方法生产正射影像,要求有准确的外业控制资料,且耗时耗力,遇到某地区没有现成的DEM,又没有带高程信息的地形图可供利用时,其不失为一种很好的方法。但若有现成DEM可供利用,则可采用单片数字正射纠正方案,该方案不仅可以省一道很费人力物力的工序,而且还可根据相片本身的重叠度,进行隔片纠正,从生产成本和速度上大大提高了生产效率,本文就是基于这种思路,介绍基于遥感图像处理系统ERDAS来进行航片正射纠正生产正射影像的方法。
2正射纠正的原理和方法
2.1原理:
数字正射纠正的实质就是将中心投影的影像通过数字元纠正形成正射投影的过程,其原理是将影像化为很多微小的区域,根据有关的参数利用相应的构像方程式或按一定的数学模型用控制点解算,求得解算模型,然后利用数字元高程模型对原始非正射影像进行纠正,使其转换为正射影像。注意纠正时尽量利用影像中心区域的影像,而避免利用影像边缘的影像。
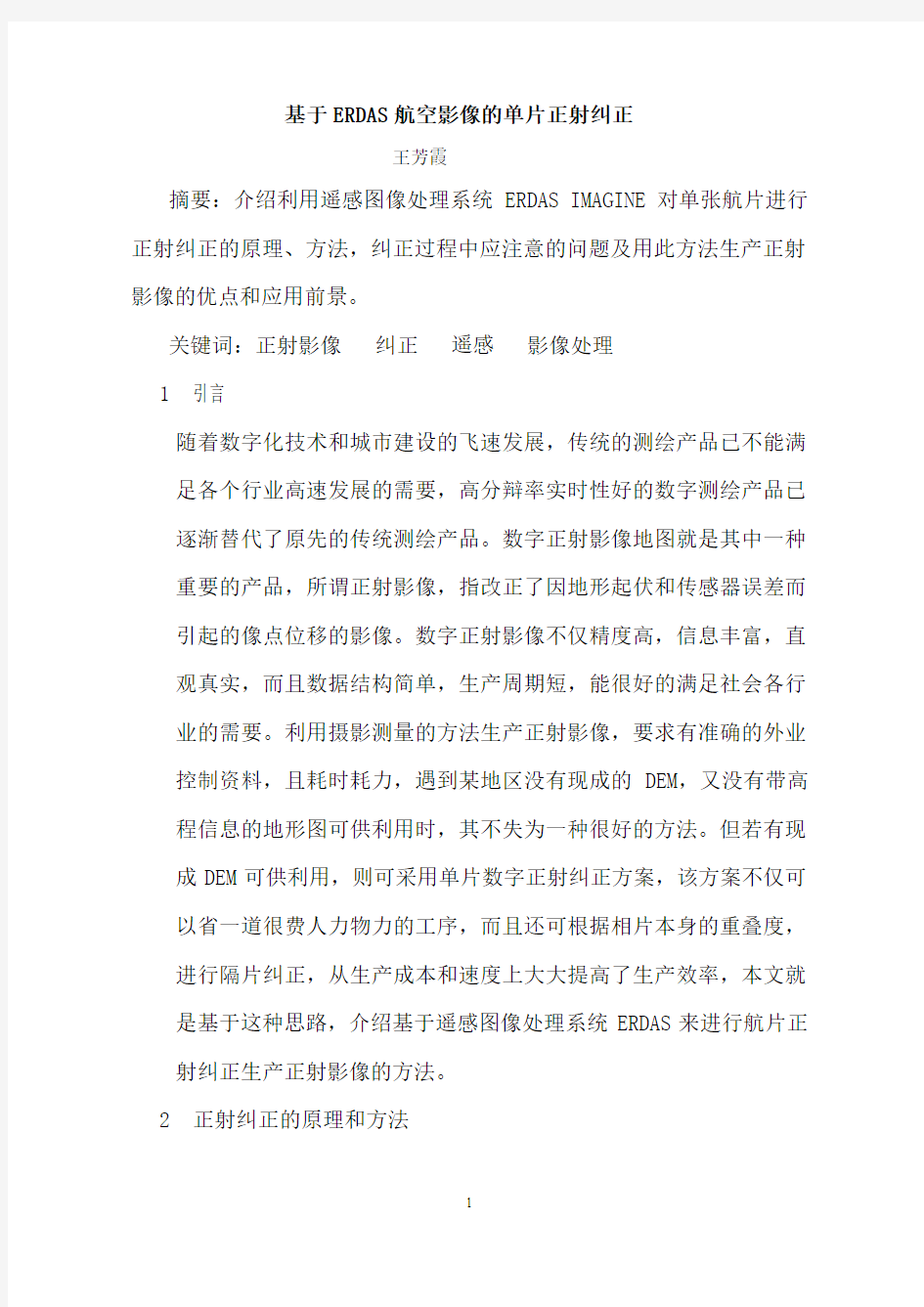
2.2正射纠正的工艺流程如下:
2.3正射纠正的方法
2.3.1资料准备
搜集与纠正地区相关的各种控制点坐标资料,纸图、栅格资料,(已具有坐标信息)、DEM、本摄区航摄鉴定表等相关资料,准备利用数字微分纠正的方法进行正射纠正。
2.3.2纠正方法
利用专业遥感影像处理软件ERDAS提供的正射纠正模块进行纠正,纠正过程为:
(1)输入航摄参数:进入ERDAS航空影像正射纠正模块后,严格按照航鉴表提供的参数输入各项参数,注意高程模型文件必须是ERDAS 内部资料格式*.img,且其投影应和参考影像的投影一致。
(2)确定内定向参数
根据航片的实际情况,选择框标类型为四角框标或四边框标或边角框标,测定四个或八个框标点,输入对应的图像坐标,计算内定向误差(error),若error<1,则表示内定向成功,可以进行后面的操作。若error>1,则需分析原因,重新定向,直到error<1为止。
(3)设置投影参数
根据需要,定义参考栅格影像、待纠正影像投影参数,注意两者投影参数应严格一致。进一步定义地图坐标单位(map units)为米(meters),定义完这些参数以后,另存为模型文件*.gms,以便纠正后面航片时调用。
(4)采点纠正
分析已有资料,如果已经通过GPS测量、或摄影测量、或常规外业控制测量、或其它途径获得了足够的控制点坐标资料,则可直接保存为ERDAS IMAGINE的控制点文件格式或ASCII数据文件,采取文件采点模式,直接在数据文件中读取控制点坐标来进行纠正。如果已经拥有需校正区域的数字地图、或经过校正的图像、或注记图层资料,则可采用窗口采点的模式进行纠正。本例地区以1:10000栅格地图作为地理参考,在其上选取若干参考点作控制点,在航片上选取相应同名点,选点时注意选在特征明显的地方,不能太靠近影像边缘,点位元分布应均匀。ERDAS自动解求模型,计算中误差、残查及控制点X 、Y坐标值误差。根据实际情况确定残差限差,一般航片纠正残差限差小于3米即可,以保证纠正后影像不变形为基准。
(5)航空影像重采样
重采样过程就是根据未校正图像像元值计算生成一幅校正图像的过程。ERDAS重采样常用三种方法:邻近点插值法(Nearest Neighbor)、双线性插值法(Bilinear Interpolation)、立方卷积插值法(Cubic convolution),采用邻近点插值法进行重采样,速度快,效果也比较好(采样过程中忽略零值)。
经过上面一系列的处理后,一幅具有坐标系统和投影信息的正射影像就生成了,检验图像校正的结果,若满足要求,本张航片正射纠正完成,即可进行下一张航片的纠正。
2.4生成数字正射影像地图
所需航片纠正完成后,根据需要裁切,利用ERDAS8.5输出具有头文件*.TFW的TIF文件,在PhotoShop下进行灰度处理,使灰度基本一致,再输入到ERDAS中,镶嵌生成一整幅DOM,然后根据所需图幅的坐标,按坐标裁切,生成图幅正射影像DOM。再进行图幅整饰,生成数字正射影像地图。
3纠正中应注意的问题
(1)纠正过程中,各种参数的选取一定要准确,不能有丝毫马虎。(2)航片重叠度一般为65%左右,纠正中根据情况可采用隔片纠正的方法,而不必每片都进行纠正,这样可节省大量的人力物力和财力,便于节省时间,提前完成任务。在工期要求紧的情况下,这种方法尤其值得推荐。
(3)本方法中DEM的覆盖范围必须是全部纠正区域,不能有缺少,否则无法完成微分纠正工作。
(4)纠正完成后拼接时,要利用ERDAS提供的各种拼接方法尽可能保证拼接的精度,不能有地物不接边的情况出现。
4结束语
DOM作为一种新的数字测绘产品,同时具有几何精度和影像特征,信息量大,内容丰富,直观真实,应用前景十分广阔。利用单张像片微
分纠正的方法生产正射影像,具有很多优点,目前,DEM已成为国家基础数字测绘产品之一,利用已有地形图生产DEM的工艺也已经非常成熟、非常迅速,精度完全能满足生产DOM的需要。所以,应用微分纠正的方法生产正射影像不失为一种很好的方法,在一些经济发展迅速的地方,需要实时更新DOM 以满足各方面的需要,微分纠正更新DOM大大降低了生产成本,提高了生产效率,省时省力,受到了广大技术人员的青睐。
参考文献
1、1:10000基础地理信息资料生产与建库总体技术纲要国家测绘局
2、ERDAS IMAGINE遥感图像处理方法清华大学人居环境研究中心
几何校正操作步骤 实验目的: 通过实习操作,掌握遥感图像几何校正的基本方法和步骤,深刻理解遥感图像几何校正的意义。 实验内容: ERDAS软件中图像预处理模块下的图像几何校正。几何校正就是将图像数据投影到平面上,使其符合地图投影系统的过程。而将地图投影系统赋予图像数据的过程,称为地里参考(Geo-referencing)。由于所有地图投影系统都遵循一定的地图坐标系统,因此几何校正的过程包含了地理参考过程。 1、图像几何校正的途径 ERDAS图标面板工具条:点击DataPrep图标,→Image Geometric Correction →打开Set Geo-Correction Input File对话框(图2-1)。 ERDAS图标面板菜单条:Main→Data Preparation→Image Geometric Correction→打开Set Geo-Correction Input File对话框(图2-1)。 在Set Geo-Correction Input File对话框(图1)中,需要确定校正图像,有两种选择情况: 其一:首先确定来自视窗(FromViewer),然后选择显示图像视窗。 其二:首先确定来自文件(From Image File),然后选择输入图像。 2、图像几何校正的计算模型(Geometric Correction Model) ERDAS提供的图像几何校正模型有7种,具体功能如下:
3、图像校正的具体过程 第一步:显示图像文件(Display Image Files) 首先,在ERDAS图标面板中点击Viewer图表两次,打开两个视窗(Viewer1/Viewer2),并将两个视窗平铺放置,操作过程如下: ERDAS图表面板菜单条:Session→Title Viewers 然后,在Viewer1中打开需要校正的Lantsat图像:xiamen,img 在Viewer2中打开作为地理参考的校正过的(图象或)矢量图层:xmdis3.shp 第二步:启动几何校正模块(Geometric Correction Tool)Viewer1菜单条:Raster→Geometric Correction →打开Set Geometric Model对话框(2-2) →选择多项式几何校正模型:Polynomial→OK →同时打开Geo Correction Tools对话框(2-3)和Polynomial Model Properties对话框(4)。 在Polynomial Model Properties对话框中,定义多项式模型参数以及投影参数:→定义多项式次方(Polynomial Order)(图2-4):2 →定义投影参数:(PROJECTION):略 →Apply→Close →打开GCP Tool Referense Setup 对话框(2-5)
无人机航空摄影正射影像及地形图制作项目技 术方案精编版 MQS system office room 【MQS16H-TTMS2A-MQSS8Q8-MQSH16898】
无人机大比例尺地形图航空摄影、正射影 像制作项目技术方案 1、概述 根据项目需求对项目区进行彩色数码航空摄影,获取真彩数码航片,并制作正射影像 及地形图。 作业范围 呼伦贝尔市北部区域约400平方公里。如下图:
飞行区域(红色) 作业内容 对甲方指定的范围进行1:2000航空摄影,获取高分辨率的彩色影像。 行政隶属 任务区范围隶属于呼伦贝尔市。 作业区自然地理概况和已有资料情况 作业区自然地理概况 (1)地理位置 呼伦贝尔市地处东经115°31′~126°04′、北纬47°05′~ 53°20′。东西630公里、南北700公里,总面积万平方公里?[2]??,占自治区面积的%,相当于山东省与江苏省两省面积之和。南部与相连,东部以为界与为邻,北和西北部以为界与接壤,西和西南部同交界。边境线总长公里,其中中俄边界公里,中蒙边界公里。 (2)地形概况 呼伦贝尔市西部位于内蒙古高原东北部,北部与南部被大兴安岭南北直贯境内。东部为大兴安岭东麓,东北平原——边缘。地形总体特点为:西高东低。地势分布呈由西到东地势缓慢过渡。 (3)气候状况 呼伦贝尔地处温带北部,大陆性气候显着。以与额尔古纳河交汇处为北起点,向南大致沿120°E经线划界:以西为中温带大陆性草原气候;以东的大兴安岭山区为中温带季风性混交林气候,低山丘陵和平原地区为中温带季风性森林草原气候,“乌玛-奇乾-根河-图里河-新帐房-加格达奇-125°E蒙黑界”以北属于寒温带季风性针叶林气候。 已有资料情况 甲方提供的航飞范围。 2、作业依据 (1)《全球定位系统(GPS)测量规范》GB/T18314-2009; (2)全球定位系统实时动态测量(RTK)技术规范》CH/T2009-2010; (3)《低空数字航空摄影规范》CH/Z3005-2010; (4)《低空数字航空摄影测量外业规范》CH/Z3004-2010; (5)《航空摄影技术设计规范》GB/T19294-2003; (6)《摄影测量航空摄影仪技术要求》MH/T1005-1996; (7)《航空摄影仪检测规范》MH/T1006-1996;
最新无人机应用于航空测绘的解决方案 篇一:无人机应用于航空测绘解决方案 无人机应用于航空测绘解决方案 一、背景简介 1、行业背景 随着3S技术为代表的高新测绘技术和计算机技术的快速发展,传统的测绘行业正在迅速向地理信息产业转化。传统的测绘生产主体模式已发生根本性变化,产品由模拟形式转为数字形式,大量的外业测量被室内地理信息采集所取代。地理信息的采集、存贮、加工和分发已成为一种全新的概念。 2、行业需求 随着市场经济体制的建立和不断完善,测绘市场发育趋向成熟。首先,测绘产品的需求不断增大,服务领域不断拓宽。近年来,除传统用户外,电信、公安、环保、金融等行业的需求不断增长,测绘产品的服务面几乎覆盖了国民经济的所有行业,初步实现了测绘为国民经济建设、国防、民众和政府服务的行业目标,充分显示了测绘行业的重要性。 二、行业需求分析 三、无人机航空测绘系统具体解决方案 (一)应用无人机遥感技术采集数据 我司通过无人机航摄所获取的竖直摄影影像、交向摄影影像、倾斜影影像以及复杂航线多基线摄影影像;通过多
视影像匹配自动构建空中三角测量网,能进行多达10000片影像的大区域网光束平差;配合低空遥感的高分辨率影像,实现高精度航测定位;并且,能自动化生产数字高程模型(DEM)和数字正射影像(DOM)等产品。 (1)快速响应 无人机航测通常低空飞行,空域申请便利,受气候条件影响较小。对起降场地的要求,可通过一段较为平整的路面实现起降。升空准备时间15分钟即可、操作简单、运输便利。车载系统可迅速到达作业区附近设站,根据任务要求每天可获取数十至两百平方公里的航测结果。 (2)快速获取地表数据和建模 系统携带的数码相机、数字彩色航摄相机等设备可快速获取地表信息,获取超高分辨率数字影像和高精度定位数据,生成DEM、三维正射影像图、三维景观模型、三维地表模型等二维、三维可视化数据,便于进行各类环境下应用系统的开发和应用。 (二)利用像素工厂进行后期数据处理 公司利用无人机遥感技术,结合像素工厂进行信息处理和分析。所得的数据将成立体三维图像,实时反馈给主管部门。 像素工厂(Pixel Factory,PF)由法国SPOT INFOTERRA 公司研制开发,是一套用于大型生产的对地观测数据处理系
无人机大比例尺地形图航空摄影、正射影像制作项目技术案
1、概述 根据项目需求对项目区进行彩色数码航空摄影,获取真彩数码航片,并制作正射影像及地形图。 1.1作业围 呼伦贝尔市北部区域约400平公里。如下图:
飞行区域(红色) 1.2作业容 对甲指定的围进行1:2000航空摄影,获取高分辨率的彩色影像。 1.3行政隶属 任务区围隶属于呼伦贝尔市。 1.4作业区自然地理概况和已有资料情况 1.5 作业区自然地理概况 (1)地理位置 呼伦贝尔市地处东经115°31′~126°04′、北纬47°05′~53°20′。东西630公里、南北700公里,总面积26.2万平公里 [2] ,占自治区面积的21.4%,相当于省与省两省面积之和。南部与兴安盟相连,东部以嫩江为界与省大兴安岭地区为邻,北和西北部以额尔古纳河为界与俄罗斯接壤,西和西南部同蒙古国交界。边境线总长1733.32公里,其中中俄边界1051.08公里,中蒙边界682.24公里。 (2)地形概况 呼伦贝尔市西部位于高原东北部,北部与南部被大兴安岭南北直贯境。东部为大兴安岭东麓,东北平原——松嫩平原边缘。地形总体特点为:西高东低。地势分布呈由西到东地势缓慢过渡。 (3)气候状况 呼伦贝尔地处温带北部,大陆性气候显著。以根河与额尔古纳河交汇处为北起点,向南大致沿120°E经线划界:以西为中温带大陆性草原气候;以东的大兴安岭山区为中温带季风性混交林气候,低山丘陵和平原地区为中温带季
风性森林草原气候,“乌玛-奇乾-根河-图里河-新帐房-加格达奇-125°E蒙黑界”以北属于寒温带季风性针叶林气候。 1.6已有资料情况 甲提供的航飞围。 2、作业依据 (1)《全球定位系统(GPS)测量规》GB/T 18314-2009; (2)全球定位系统实时动态测量(RTK)技术规》CH/T2009-2010; (3)《低空数字航空摄影规》CH/Z3005-2010; (4)《低空数字航空摄影测量外业规》CH/Z3004-2010; (5)《航空摄影技术设计规》GB/T 19294-2003; (6)《摄影测量航空摄影仪技术要求》MH/T 1005-1996; (7)《航空摄影仪检测规》MH/T 1006-1996; (8)《航空摄影产品的注记与包装》GB/T 16176-1996; (9)《基础航空摄影产品检查验收和质量评定实施细则》测绘局; (10)《基础航空摄影补充技术规定》测绘局; (11)《1∶500、1∶1000、1∶2000地形图航空摄影规》GB/T 6962-2005; (12)《1∶500、1∶1000、1∶2000地形图航空摄影测量外业规》GBT 7931-2008; (13)《1∶500、1∶1000、1∶2000地形图航空摄影测量业规》GBT 7930-2008; (14)《1∶500、1∶1000、1∶2000地形图航空摄影测量数字化测图规》GB 15967-1995;
实验二使用ENVI进行正射校正 1正射校正 正射校正是对一个影像空间和几何畸变进行校正生成平面正射影像的处理过程。将相机或卫星模型与有限的地面控制点结合起来,可以建立正确的校正公式,产生正确的,经几何校正的具有地图精度级的正射影像。 2 使用ENVI进行正射校正的步骤 使用ENVI进行正射校正需要几个步骤来完成,不考虑采集数字影像数据的传感器和像 片类型。这些步骤包括: 1 进行内定向(Interior Orientation,只针对航空像片而言):内定向将建立相机参数和航空像片之间的关系。它将使用航空像片间的条状控制点、相机框标(fiducial mark)和相机的焦距,来进行内定向。 2 进行外定向(Exterior Orientation)外定向将把航片或卫片上的地物点同实际已知的地面位置(地理位置)和高程联系起来。通过选取地面控制点,输入相应的地理坐标,来进行外定向。这个过程同影像到影像的配准(image to map registration)比较相似。 3 使用数字高程模型(DEM)进行正射校正,这一步将对航片和卫片进行真正的正射校正。校正的过程将使用定向文件、卫星位置参数,以及共线方程(collinearity equation)。共线方程是由以上两步,并协同数字高程模型共同建立生成的。 在进行正射校正之前,需要考虑影像空间分辨率的大小。正射校正的处理同ENVI影像 配准有所不同,它有三个关键的参数: DEM的像元大小 输出影像的像元大小 正射校正后输出影像的像元大小 允许对任何像元大小的影像进行处理,但是这些参数将对输出结果有很大的影响。理想情况下,DEM的像元大小应该同要创建的输出正射影像大小相同(或者更小)。如果DEM 分辨率明显大于所需的输出分辨率,那么得到的正射校正影像结果将有了一些明显的误差。在结果影像中,这些误差成阶梯状或块状分布,这种情况通常发生在像素集群的边缘处,这些位置通常会被赋予相同的 DEM高程。因此在ENVI中进行正射校正之前,要使用Basic Tools →Resize Images(spatial/spectral),将重采样成所需的输出正射影像的分辨率。在这里建议 使用双线性插值法(bilinear interpolation)进行重采样。 这次实验的数据为IKONOS数据,由美国space Imaging和Digital Globe公司提供。ENVI中的IKONOS影像的正射校正功能将使用RPC相机模型,RPC工具既不需要DEM文件,也不需要地面控制点。 3 查看正射校正所涉及的影像 1要打开一个文件,从ENVI主菜单中,选择file →open image file。 2 在出现的Enter data filename文件选择对话框中,点击open file按钮,选择envidata目录下的ortho子目录,从文件夹中选择po_101515_pan_0000000.tif文件,然后点击open。 3 在可用波段列表中,选择grey scale单选按钮,选择刚打开IKONOS影像文件的第一个波段,然后点击load band按钮显示该波段。 4 从ENVI主菜单栏中,选择file →open external file→Digital Elevation→USGS DEM,选择进入envidata目录下的ortho子目录的conus_USGS.dem文件,然后点击open。
无人机大比例尺地形图航空摄影、正射影像制作项目技术方案
1、概述 根据项目需求对项目区进行彩色数码航空摄影,获取真彩数码航片,并制作正射影像及地形图。 1.1 作业范围 呼伦贝尔市北部区域约400 平方公里。如下图:
飞行区域(红色) 1.2 作业内容 对甲方指定的范围进行1:2000 航空摄影,获取高分辨率的彩色影像。 1.3 行政隶属 任务区范围隶属于呼伦贝尔市。 1.4 作业区自然地理概况和已有资料情况 1.5 作业区自然地理概况 ( 1)地理位置 呼伦贝尔市地处东经115°31′~ 126°04′、北纬47°05′~53°20′。东西 630 公里、南北 700 公里,总面积 26.2 万平方公里[2],占自治区面积的21.4%,相当于山东省与江苏省两省面积之和。南部与兴安盟相 连,东部以嫩江为界与黑龙江省大兴安岭地区为邻,北和西北部以额尔古纳河为 界与俄罗斯接壤,西和西南部同蒙古国交界。边境线总长 1733.32 公里,其中中 俄边界 1051.08 公里,中蒙边界 682.24 公里。 (2)地形概况 呼伦贝尔市西部位于内蒙古高原东北部,北部与南部被大兴安岭南北 直贯境内。东部为大兴安岭东麓,东北平原——松嫩平原边缘。地形总体特点为:西高东低。地势分布呈由西到东地势缓慢过渡。 (3)气候状况 呼伦贝尔地处温带北部,大陆性气候显著。以根河与额尔古纳河交汇 处为北起点,向南大致沿120°E经线划界:以西为中温带大陆性草原气候;以 东的大兴安岭山区为中温带季风性混交林气候,低山丘陵和平原地区为中温带季 风性森林草原气候,“乌玛- 奇乾 - 根河 - 图里河 - 新帐房 - 加格达奇 - 125°E蒙黑界”以北属于寒温带季风性针叶林气候。 1.6 已有资料情况 甲方提供的航飞范围。 2、作业依据 (1)《全球定位系统( GPS)测量规范》 GB/T 18314-2009; (2)全球定位系统实时动态测量( RTK)技术规范》 CH/T2009-2010; (3)《低空数字航空摄影规范》 CH/Z3005-2010; (4)《低空数字航空摄影测量外业规范》 CH/Z3004-2010;
北京揽宇方圆信息技术有限公司 遥感卫星影像辐射校正、几何校正、正射校正的方法 a)辐射校正:进入传感器的辐射强度反映在图像上就是亮度值(灰度值)。辐射强度越大,亮度值(灰度值)越大。该值主要受两个物理量影像:一是太阳辐射照射到地面的辐射强度,二是地物的光谱反射率。当太阳辐射相同时,图像上像元亮度值差异直接反映了地物目标光谱反射率的差异。但实际测量时,辐射强度值还受到其他因素的影响而发生改变。这一改变就是需要校正的部分,故称为辐射畸变。引起辐射畸变有两个原因:一是传感器本身的误差;二是大气对辐射的影响。 仪器引起的误差是由于多个检测器之间存在的差异,以及仪器系统工作产生的误差,这导致了接收的图像不均匀,产生条纹和“噪声”。 一般来说,这种畸变在数据生产过程中已经由生产单位根据传感器参数进行了校正,不需要用户自行校正。 b)几何校正:当遥感图像在几何位置上发生了变化,产生诸如行列不均匀,像元大小与地面大小对应不准确,地物形状不规则变化等畸变时,即说明遥感影像发生了几何畸变。遥感影像的总体变形(相对与地面真实形态而言)是平移、缩放、旋转、偏扭、弯曲及其他变形综合作用的结果。产生畸变的图像给定量分析及位置配准造成困难,因此遥感数据接收后,首先由接收部门进行校正,这种校正往往根据遥感平台、地球、传感器的各种参数进
行处理。而用户拿到这种产品后,由于使用目的的不同或者投影及比例尺的不同,仍然需要作进一步的几何校正。几何校正一般包括精校正和正射校正。 精校正:利用地面控制点对由于各种因素引起的遥感图像的几何畸变进行校正。简单理解:和地形图的校正,校正后有准确的经纬度信息。精校正适合于在地面平坦,不需要考虑高程信息,或地面起伏较大而无高程信息的情况。有时根据遥感平台的各种参数已做过一次校正,但仍不能满足要求,就可以用该方法作遥感影像相对于地面坐标的配准校正,遥感影像相对于地图投影坐标系统的配准校正,以及不同类型或不同时相的遥感数据之间的几何配准和复合分析,以得到比较精确的结果。 C)正射校正:正射影像制作一般是通过在像片上选取一些地面控制点,并利用原来已经获取的该像片范围内的数字高程模型(DEM)数据,对影像同时进行倾斜改正和投影差改正,将影像重采样成正射影像。将多个正射影像拼接镶嵌在一起,并进行色彩平衡处理后,按照一定范围内裁切出来的影像就是正射影像图。正射影像同时具有地形图特性和影像特性,信息丰富,可作为GI S的数据源,从而丰富地理信息系统的表现形式。 所谓正射影像,指改正了因地形起伏和传感器误差而引起的像点位移的影像。数字正射影像不仅精度高,信息丰富,直观真实,而且数据结构简单,生产周期短,能很好的满足社会各行业的需要。在地势起伏较大的地方,使用正射校正来解决地势起伏较大引起的误差,做正射校正需要用DEM 北京揽宇方圆信息技术有限公司是国内的领先遥感卫星数据机构,而且是整合全球的遥感卫星数据资源,分发不同性能、技术应用上可以互补的多种卫星影像,包括光学、雷达卫星影像、历史遥感影像等各种卫星数据服务,各种专业应用目的的图像处理、解译、顾问服务以及基于卫星影像的各种解决方案等。遥感卫星影像数据贯穿中国1960年至今的所有卫星影像数据,是中国遥感卫星数据资源最多的专业遥感卫星数据服务机构,提供多尺度、多分辨率、全覆盖的遥感卫星影像数据服务,最大限度的保证了遥感影像数据获取的及时性和完整性。
第34卷第3期 2009年5月 测绘科学 Science of Surveying and M app ing Vol 134No 13 M ay 作者简介:边馥苓(19412),女,教授,博士生导师,国际软件学院空间信息与数字工程研究中心主任,现从事地理信息系统、摄影测量及其应用方面的研究。E 2mail:flbian @wtus m 1edu 1cn 收稿日期:2008211218 真正射影像生成中遮蔽区域的补偿 边馥苓 ①② ,王 潇 ①② (①武汉大学空间信息与数字工程研究中心,武汉 430079; ②武汉大学测绘遥感信息工程国家重点实验室,武汉 430079) 【摘 要】 经过正射纠正后的真正射影像,往往会出现建筑物遮挡造成的影像信息缺失区域。本文采用相邻影 像补偿、图像修复两种方法依次对这些缺失区域进行补偿。对于因相邻影像信息不足,仍未补偿的剩余像素,在引入DBM 模型的基础上,进一步提出一种基于有效像素的样本纹理合成方法,实验结果证明,该方法优于常规图像修复算法,生成了完整的真正射影像。【关键词】真正射影像;遮蔽区域;像素补偿;有效像素;纹理合成【中图分类号】TP75 【文献标识码】A 【文章编号】100922307(2009)0320081203 1 引言 城市地区航空影像上,建筑物往往对周围地面及地物造成了遮挡现象。通过真正射影像纠正的方式将地面及建筑物进行精确纠正后[1,2],正射影像上会留下被建筑物遮挡的影像信息缺失区域。该问题将影响正射影像的使用和其功能的发挥,因此需要对遮蔽区域进行补偿。遮蔽区域补偿一般有如下三种处理方式[3]:以特殊颜色(如黑色)补充到遮蔽区域;以相邻影像上可见的对应像素补充到遮蔽区域;通过图像修复的方法,用该影像上的已有信息推测出遮蔽区域的信息,填补到像素缺失区域。第一种方法保留了原始可见情况,但是从美观和完整性来说都是不足的。第二种方法利用了真实信息,最为准确可靠。Zhou 、Sheng 等人都通过一定的准则在不同的相邻影像上选择最优像素进行补偿[4,5]。然而这种方式往往不能对遮蔽区域完全补偿[4]。第三种用的是非真实纹理,不能代表实际的地物信息。对于较简单、或纹理重复的区域,这种补偿方式能保证影像的连续性和完整性,该方法属于图像复原领域,已有不少较成熟的算法,如偏微分方程算法、变分算法、纹理合成算法等等[6210],然而也有其各自的适用范围。本文首先利用相邻影像的最佳对应像素对遮蔽区域进行补偿,然后提出一种基于样本的纹理修复与DBM 模型相结合的方法对剩余区域进行完整修复。 2 正射影像像素补偿 211 相邻正射影像补偿原理 最为可靠的正射影像像素补偿方式是选取原始影像相邻像片上的对应像素补偿到影像缺失区域。补偿信息来源于航向及旁向上重叠的相邻影像。相邻影像之间的视角越丰富,就越能获取更多的缺失像素。 当相邻影像信息较为丰富时,主影像上被遮挡的区域即可在不同的相邻副影像上获取到对应像素,此时需要选取最可靠的正射影像点。Zhou 利用不同影像上的地物点纠正的可靠性来进行选择。一般来说,正射影像上投影差改正较小的区域,其纠正的可靠性会更高。主垂线与地面的交点称为地底点,显然,该点在影像上的投影差最小,为 0。距离地底点越近,投影差越小,因此可以在待选副影像 的对应像素中,选择距离地底点最近的地物对应像素作为最可靠像素[4],补偿到该遮挡点上。 Yang 利用地物点摄影方向和铅垂线的夹角来选择补偿像素,如果夹角越小,视线方向越垂直,可靠性也越高,该方法的本质和Zhou 的方法是一致的,都是选取投影差改正较小的点作为补偿点。 然而在实际情况中,通过相邻影像的对应像素补偿并不能保证遮蔽地区的完整恢复。遮蔽点的可见性与摄影中心高度,建筑物高度,建筑物在摄影方向离地底点的距离等因素有关[4]。当建筑物较为拥挤,飞行高度较低等情况下,往往不能完整的对遮蔽区域进行补偿。此时为了正射影像的完整性和美观性,应对剩余的遮蔽区域作进一步纹理修复。212 基于有效像素的样本纹理合成算法 图像修复的方法是图像复原问题中的重要内容,在修复受损图像资料、古建筑物保护、目标隐藏等方面有着广泛应用[11,12]。图像修复一般分为两类,一类是纹理合成算法,这类算法可以利用纹理样本修复较大的缺失区域;另一类是基于结构的修复技术,用于修复较细小的缺损。纹理合成算法中最常用的方法是基于样本的纹理合成算法。取一个以某像素为中心的窗口,计算其他像素窗口与该窗口的最小SS D (Su m of Squared D ifferences )值[10],再将该窗口的像素对应复制到待修复窗口内的缺失像素。基于结构的图像修复技术中比较著名的方法有偏微分方程算法,主要思想是将热扩散思想应用到图像中信息的传播,如BSC B (Bertal m i o 2Sap ir o 2Caselles 2Ballester )算法、Euler 弹性曲线模型方法(Euler elastica model )[6]、CDD (curvature driven dif 2 fusi ons )算法[7] ;此外还有基于变分的算法如BV (Bounded Variati on )算法和T V (T otal Variati on )算法[9] ,该类算法主要利用建立的图像数学模型和先验模型,将修复问题转化为变分问题[12]。 在实际应用中,两类算法各有优缺点,基于纹理合成的修复方法中,修复区域的颜色更为逼真,损失较小,但对于具有结构性的信息没有很好的延续,容易出现断裂现象;而基于结构的修复方法一般都是利用扩散原理,因此能更好的保持结构特征的延续,但是修复区域容易出现模糊现象。Cri m inisi 提出了一种将两类方法相结合的算法[8]。该算法基于样本选取的纹理合成方法,在模板匹配的时候,引入优先权的概念。优先权的表达式为 P (p )=C (p )D (p ) (1)其中,C (p )为每个像素点的置信度项;D (p )为数据项,包含了结构信息。每个像素点的置信度和数据项的表达式如(2)、(3)式所示: C (p )= ∑ q ∈ ψp ∩(I-Ω)C (q ) ψp (2)
XXX县航测数字化成图、数字正射影像图制作项目 招标文件 招标人:XXX县规划局 XXX年XX月
目录 第一部分投标邀请书 (1) 第二部分招标人需求 (2) 1、项目概况 (2) 1.1本次工程项目具体任务情况: (2) 2、主要作业依据 (2) 第三部分投标人须知 (4) (一)投标须知前附表 (5) (二)投标须知 (6) 4、说明 (6) 5、合格的投标人 (6) 6、招标人保留的权力 (6) 7、投标文件的真实性 (7) 8、投标费用 (7) (三)招标文件 (7) 9、招标文件的容 (7) 10、招标文件的澄清 (7) 11、招标文件的修改 (8) (四)投标文件 (8) 12、投标文件的语言及度量衡单位 (8) 13、投标文件的组成 (8) 14、投标报价 (9) 15、投标文件的式样、签署和包装 (10) 16、投标保证金 (10) 17、投标文件的递交 (11) (五)开标与评审 (11) 18、开标 (11) 19、评审 (11) (六)合同的授予与签订 (12) 20、中标通知 (12) 21、合同授予与签订 (13) (七)腐败和欺诈行为 (13) 22、腐败和欺诈行为 (13) 第四部分评标办法 (13) 23、评标原则 (14) 24、定标原则 (14) 25、评分办法 (14) 第五部分投标文件部分格式 (15) 投标函 (15) 授权委托书 (17) 投标报价表 (18) 附图 (23)
第一部分投标邀请书 : 现正式邀请贵单位(公司)参加XXX县航测数字化成图及数字正射影像图制作项目招标。请按招标文件的要求认真准备投标文件,按时前来投标,并按本招标文件投标须知确定的时间、地点开标。投标单位的法定代表人,或其委托代理人应准时出席,否则视为弃权处理。 1、项目名称:XXX县航测数字化成图、数字正射影像图(DOM)制作。 2、项目容: XXX县航测数字化成图、数字正射影像图(DOM)制作及地形图快拼、正射影像快视浏览、规划管理信息系统。 3、招标文件发布时间:XXXX年XX月8日16:00开始。 4、招标文件网上索取或现场索取。 5、答疑时间:在XXXX年XX月 16 日16:00前必须将疑问以书面形式传真(XXX)或送至XXX县规划局城建大厦四楼。 6、投标地点:XXX县规划局(城建大厦四楼)。 7、开标地点:XXX县建设局一楼建设工程交易中心。 8、开标时间:2008年7 月18 日9:00起。 9、评标时间:2008年7 月18日9:00起至评标结束。 10、邀请方式:文字邀请或邀请。 11、联系方式: 联系人: XXX XXX 电话: 传真: 通讯地址:XXX县 邮编: XXX县规划局 XXXX年XX月8 日
POS辅助航空摄影正射影像图制作与应用 摘要:以制作衡阳市1:2000数字正射影像图为例,总结了1:2000数字正射影像制作的技术要点与基本流程,介绍自动DEM制作正射影像图的制作方法,阐述了衡阳市1:2000正射影像图的实际应用情况,并指出数字正射影像图有着广泛的应用前景。 关键词:航空摄影正射影像图制作POS系统 前言:随着数字航空摄影和航天摄影技术的不断发展,摄影数字测绘产品的不断完善,以及数字产品社会需求日益扩大。数字正射影像图以其地面信息丰富,地物直观,工作效率高,成图周期短、成本低、精度高的优势已经越来越多地被广泛应用。 1.正射影像图制作技术简介 正射影像图是以数字高程模型为基础,对航空相片(或者航天相片)进行数字微分纠正、数字镶嵌,根据图幅范围裁切生成带有方格网、图廓内外整饰的影像数据的底图,根据用户的需求还可附有等高线和地名。 衡阳市数字正射影像图成图比例尺为1:2000,航空摄影采用带POS辅助空三的摄影系统,摄影地面分辨率为0.2米,像对覆盖地面范围约为1.7平方公里。由于航空摄影带有POS系统,因此,外业相片控制测量只需要布设少量的控制点,通过DPgrid进行空中三角测量,利用数字摄影测量工作站进行数字高程模型(DEM)的制作、数字正射影像的自动生成和数字正射影像的镶嵌,对镶嵌后的影像进行匀光、匀色处理,使影像色彩(灰度)达到基本一致,使正射影像的整体视觉效果舒适,最后根据内图廓线进行影像的裁切,数字正射影像图制作完成。 2.制作正射影像图的工艺流程 根据衡阳测区影像图生产实践,总结出利用POS航空摄影数据制作正射影像图的基本流程。具体流程如下: 图1 正射影像图生产流程 1)POS数据解算
航空遥感与摄影测量应用 发表时间:2019-04-28T11:25:57.140Z 来源:《基层建设》2019年第6期作者:李长伟 [导读] 摘要:航空遥感,是从不同的航空高度上,应用各种传感器:航空测量照相机,多波段照相机、多波段扫描仪、红外辐射扫描仪、微波传感器、合成孔径测视雷达、感光胶片及磁带等。 中科遥感科技集团有限公司天津市 300380 摘要:航空遥感,是从不同的航空高度上,应用各种传感器:航空测量照相机,多波段照相机、多波段扫描仪、红外辐射扫描仪、微波传感器、合成孔径测视雷达、感光胶片及磁带等。接收和记录传输来自地球表层的各类地物的各种电磁波谱信息,并对这些信息影像数据进行分析研究,从而达到对不同的地物及其特性进行远距离的探测的综合技术。 关键词:航空遥感;摄影测量;应用 1、前言 摄影测量是应用几何光学的理论和精密的光电仪器技术,对航空遥感信息影像进行三维空间的定位定量的测量和制图,它与航空遥感结合组成一个完整的技术体系,航空遥感的前身就是航空摄影测量。本文论述了目前航空遥感在城市规划、建设、管理与服务领域的应用情况,并就城市航空遥感应用研究的方向和任务提出了一些意见和建议。 2、航空遥感技术的发展状况 航空遥感是快速获取和更新基础地理信息的重要技术手段之一。近年来,大量专业影像资料的应用,特别是大比例尺航空影像资料的应用极大地丰富了地图产品的种类。航空遥感资料不仅是测制和更新地形图和影像图的基础数据源,也是当前地理信息系统建设获取原始数据和数据更新的主要信息源。城市信息化进程的快速推进,使得社会各部门对于航空遥感资料的需求越来越大、要求也越来越高。随着传感器技术、航空航天技术和数据通讯技术的不断发展,现代遥感技术已经进入一个能动态、快速、多平台、多时相、高分辨率地提供对地观测数据的新阶段。 经过几十年的发展,城市航空遥感数据获取能力不断提高,航空摄影测量技术逐渐成熟,利用航空摄影测量进行地理信息采集在各行业中发挥出越来越重要的作用,特别是在大面积的地理信息采集过程中,航空摄影测量以其工期短、成本低、精度高、信息量丰富等特点显示出巨大的优越性。航空遥感技术作为空间信息技术的重要组成部分,在国家经济建设诸多领域的发展与应用前景十分广阔。当前航空遥感技术的发展状况可以概括为: 1)数码航空摄影方式逐步普及。随着大幅面数码航摄像机 DMC、UCD、ADS40 以及国产数码航摄像机SWDC 的出现,基于数码航空摄影的数据获取及应用大幅增长。相对于传统航空摄影,数码航摄可以直接获取高质量影像信息,同时可以在不增加飞行成本的基础上获得较大的航向重叠度(例如 80%以上),可以消除城市高层建筑产生的遮掩问题,因此多视影像在影像匹配、三维重建及数码城市建模方面的应用已成为研究热点。 2)基于差分 GPS 和 IMU 的定位定向系统得到广泛应用。利用在飞机上装载的差分 GPS 和惯性测量单元 IMU 构成的定位定向系统(POS),可以直接获取航摄像机的外方位元素和飞机的绝对位置,实现定点摄影成像和极少地面控制甚至无地面控制的高精度对地直接定位。 3)机载激光扫描技术日趋成熟。机载激光雷达(LIDAR)集激光、全球定位系统和惯性导航系统三种技术于一体,可以高精度地定位激光束打在物体上的光斑,能够部分穿透树林的遮挡,直接获取真实地表的三维信息。在需要依靠大量人工完成的大范围城市三维建模及纹理采集、粘贴等方面,LIDAR 具有较大的优势。 4)数字摄影测量处理平台不断完善。随着数码航摄像机的引入,高分辨率、高重叠度、多时态的数据获取方式带来大量的数据,传统的数据处理方式受到新的挑战。新一代数字摄影系统的完善和高性能遥感影像处理系统像素工厂(PF)的出现,打破了传统的摄影测量流程,突破了像片、像对的限制,同时集数据编辑、入库、质量检查和流程管理等功能为一体,极大地提高了摄影测量的工作效率。 5)航空遥感的研究和应用领域越来越广泛深入。航空遥感的数据获取和处理已经突破原有的框架,数据产品在原有 4D 产品的基础上出现了新的数字表面模型(DSM)和真正射影像图(TDOM),其主要应用领域不再局限于测绘,在数字城市、智能交通、环境监测以及社会科学等众多领域已有广泛应用,服务趋于大众化和多元化。 近 10 多年来,航空遥感技术取得了较快的发展,航空遥感信息产品更丰富、成果应用更广泛,为城市规划和国土资源管理、城市建设和全社会可持续协调发展提供更直接、有效的支持与服务,在服务政府决策、服务城市管理、服务重大工程建设、服务人民群众生活等方面取得了良好的社会经济效益。 3、摄影测量和遥感技术的应用分析 3.1 绘制地形图 摄影测量技术领域的一项重要产品是数字线划矢量图。数字线划矢量图能为各类地理信息系统的建立提供基础性信息数据,为工程规划设计、施工管理等工作提供科学依据。例如,在工程建设过程中,需要使用到 1:500、1:1000、1:2000、1:5000、1:10000 等不同比例尺的地形图,利用全数字摄影测量技术可进行不同比例尺地形图的绘制,数据资料可直接传入 CAD 软件系统以及地理信息系统中,为工程设计工作带来很大便利。 3.2 建立数字地面模型 数字影像技术与三维坐标数据共同构成的地形虚拟现实就叫做数字地面模型,这些基础信息在水利工程建设中发挥着重要作用。通过数字高程模型进行工程设计、渲染流域三维景观等,该模型能把施工区域内的地形、地貌状况进行直观展示,设计方案经过渲染后就会形成景观图,既能将设计意图直接展示出来,又能利用相关软件实现三维动画漫游,对水库淹没情况进行动态模拟,对水库容量、汇水面积加以计算,以此提高设计方案的科学性、合理性。 3.3 制作正射影像地图 作为数字化摄影测量计算的重要产品之一,影像地图在工程建设领域发挥着独特优势。对于中心投影的航摄影像,影像地图可利用数字高程模型实现纠偏处理,将投影差有效消除,同时将各种标注加设在垂直投影影像上,包括等高线、坐标格网等,影像地图不但涵盖各类地表原始信息,又具备线划地图以及影像的优势,将地物地貌信息全面、直观地展示出来,成图速度与更新速度都很快,在工程管理、
Geomatica9.1正射校正ZY3卫星影像流程 该影像操作流程适用于PCI Geomatica9.1及以上版本。 正射纠正前先把原始数据中的*.txt文件修改为*_RPC.txt。 正射校正步骤: 1、工程设置,启动OrthoEngine,点击file/NEW,在filename处给新建的工程 命名。 2、设置投影信息,添加输出影像的投影方式、空间分辨率及参考资料控制点的 投影信息;
3、导入数据; 4、采集控制点
5、正射校正,输入DEM,设置输出路径,名称,工作缓存,采样间隔,采 样方式等相关参数。 PCI 10.3软件制作核线影像操作流程 1.打开PCI主菜单,选择OrthoEngine正射模块,如下图所示, 建立工程,选择选项。注意Options选项下应选择第二项
Rational Function(Extract from image),让软件自动选取适合的RPC文件格式。 工程设置 2.第二步是设置输入输出影像的坐标系统和影像分辨率。 坐标系统设置 3.输入影像,只要在“New Image”中能够打开影像,就说明能
够读入它的RPC文件,只是无法显示出来而已,在输出的结果中会体现出来。如图打开前后视和正视影像。 读入影像界面 4.控制点和连接点的选取界面。 控制点、连接点选取界面 5.模型计算,会出现完成提示。 6.生成核线影像,目的是显示立体效果和为提取DEM做准备, 将前后视影像分别赋予左右影像。
7.然后打开核线影像,用红绿眼镜就能够看到立体效果了。 8.提取DEM结果,设置输出分辨率,本实验输出为8m分辨率的
无人机后期航片拼接软件PhotoScan详细使用教程 摘要:本文主要介绍一款无人机航片后期处理软件——Agisoft Photoscan,手把手教你完成航片正射影像拼接、生成DEM。 PhotoScan是一款基于影像自动生成高质量三维模型的软件。使用时无需设置初始值,无需相机检校,利用最新的多视图影像三维重建技术,就可以对具有影像重叠的照片进行处理,也可以通过给予的控制点生成真实坐标的三维模型。无论是航拍影像还是高分辨率数码相机拍摄的影像都可以使用这个软件进行处理。整个工作流程无论是影像定向还是三维模型重建过程都是完全自动化的。PhotoScan可生成高分辨率真正射影像和带精细色彩纹理的DEM模型。使用控制点可达5cm精度。完全自动化的工作流程,即使非专业人员也可以在一台电脑上处理成百上千张航拍影像,生成专业级别的摄影测量数据。 航片拼接软件有很多,之前我们使用过Pix4D、Global mapper、EasyUAV、Photoscan,几款软件用下来,无论是操作流程,还是出图效果和速度,Photoscan的表现都要好于其他几款。
Photoscan是俄罗斯的东西,正版价格4万左右,但是提供30天全功能试用。对电脑硬件的依赖也比其他要低。很多人在用的Pix4DMapper是瑞士一家公司的产品,功能上和Photoscan大同小异,但是正版价格可以买2套Photoscan 了,而且使用下来,感觉对电脑的要求比Photoscan高不少,16G内存的电脑频频弹窗警告。 PhotoScan优势盘点: 支持倾斜影像、多源影像、多光谱影像的自动空三处理 支持多航高、多分辨率影像等各类影像的自动空三处理 具有影像掩模添加、畸变去除等功能 能够顺利处理非常规的航线数据或包含航摄漏洞的数据 支持多核、多线程CPU运算,支持CPU加速运算 支持数据分块拆分处理,高效快速地处理大数据 操作简单,容易掌握 处理速度快 不足: 缺少正射影像编辑修改功能 缺少点云环境下量测功能
ENVI4.5中的正射校正说明 在ENVI中能对绝大多数的高分辨率影像通过严格物理模型进行正射校正。 1、概述 ENVI4.5目前支持的正射校正包括两种模型:严格轨道模型(Pushbroom Sensor)和RPC有理多项式系数(Rational Polynomial Coefficient),如表1所示。包括ALOS/PRISM、ASTER、IKONOS、OrbView-3、QuickBird、SPOT1-5、CARTOSAT-1(P5)、FORMOSAT-2、worldview-1校正模型,即将推出的ENVI4.6还将增加GeoEye-1、RADARSAT-2、KOMPSAT-2、TerraSAR-X传感器模型。
表1传感器模型 ENVI还具有根据星历表参数建立RPC文件来正射校正数据的功能(Map->Build RPCs)。也可以根据地面控制点(GCP)或者外方位元素(XS, YS, ZS, Omega, Phi, and Kappa)建立RPC文件,校正一般的推扫式卫星传感器、框幅式航空相片和数码航空相片。如图1为生成RPC文件面板。当获得的卫星数据提供的是轨道参数,诸如ALOS PRISM and AVINIR, ASTER, CARTOSAT-1,, IKONOS, IRS-C, MOMS, QuickBird, WorldView-1,也可以利用这个功能来生成RPC文件做正射校正。 图1生成RPC文件面板 2、正射校正简单操作说明
第一步、打开显示数据 在主界面中,选择File-> Open External File,选择对应的传感器类型和文件格式。这里需要注意,当对SPOT5数据做正射校正时,数据格式要选择DIMAP 格式。QuickBird和WorldView-1数据很多时候提供的是Tile形式的数据,这个时候可以选择Mosiic Tiled QuickBird Product。如果需要从影像或者矢量数据中选择控制点,还需要一并将参考数据源打开。 图2 打开数据文件
摄影测量(一) 一、填空题(20 分,每空 1 分) 1、摄影测量中常用的坐标系有、、、、 2、解求单张像片的外方位元素最少需要个点。 3、GPS辅助空中三角测量的作用是。 4、两个空间直角坐标系间的坐标变换最少需要个和个地面控制点。 5、摄影测量加密按平差范围可分为、和三种方法。 6、摄影测量的发展经历了、和三个阶段。 7、恢复立体像对左右像片的相互位置关系依据的是方程。 8、法方程消元的通式为Ni,i+1 = 。 二、名词解释(20 分,每个 4 分) 1、内部可靠性: 2、绝对定向元素: 3、像主点: 4、带状法方程系数矩阵的带宽: 5、自检校光束法区域网平差: 三、简答题(45 分,每题15分) 1、推导摄影中心点、像点与其对应物点三点位于一条直线上的共线条件方程,并简要叙述其在摄影测量中的主要用途。 2、像片外方位元素的作用是什么?用图示意以y 轴为主轴的航摄像片的外方位元素。 3、如果拥有一套POS系统,你打算如何用其快速确定地面点的三维坐标(简要叙述基本思想和具体解算过程)? 四、综合题(15 分) 设某区域由两条航线组成(如图 1 所示),试根据光束法区域网平差原理回答下列问题:① 当控制点无误差时,观测值个数n、未知数个数t 、多余观测数r ; ② 按最小带宽原则在图 a 中标出像片排列顺序号并求出带宽; ③ 在图 b 中绘出改化法方程系数矩阵结构图(保留像片外方位元素)。
摄影测量(二) 一、名词解释 1 摄影测量学 2 航向重叠 3 单像空间后方交会 4 相对行高 5 像片纠正 6 解析空中三角测量 7 透视平面旋转定律 8 外方位元素 9 核面 10 绝对定向元素 二、填空 1 摄影测量的基本问题,就是将 ________ 转换为 _______ 。 2 物体的色是随着 _________ 的光谱成分和物体对光谱成分固有不变的 ______ 、__________ 、和________ 的能力而定的。 3 人眼产生天然立体视觉的原因是由于 ________ 的存在。 4 相对定向完成的标志是 ________ 。 5 光束法区域网平差时,若像片按垂直于航带方向编号,则改化法方程系数阵带宽为______ 若按平行于航带方向编号,则带宽为_________ 。 三、简答题 1 两种常用的相对定向元素系统的特点及相对定向元素。 2 倾斜位移的特性。 3 单行带法相对定向后,为何要进行比例尺归化?为何进行? 4 独立模型法区域网平差基本思想。 5 何谓正形变换?有何特点? 四、论述题