11.1杠杆
一、杠杆
1.定义:在物理学中,将一根在力的作用下可绕一固定点转动的硬棒称做杠杆。
2.五要素:支点(O)——杠杆绕着转动的点。
动力(F1)——使杠杆转动的力。
阻力(F2)——阻碍杠杆转动的力。
动力臂(L1)——从支点到动力作用线的垂直距离。
阻力臂(L2)——从支点到阻力作用线的垂直距离。
注意:⑴力臂——从支点到力的作用线的垂直距离。
⑵力臂作图的步骤:①找支点②找力的作用线③作点到线的垂直距离④标明力臂名称。
二、杠杆的平衡条件
1.探究杠杆的平衡条件
⑴杠杆处于平衡状态的情况:①静止状态②匀速转动
⑵调节杠杆在水平位置平衡的方法:调节杠杆两端的平衡螺母(左高向左,右高向右调,两边平衡螺姆调节方向一至。)
⑶调节杠杆在水平位置平衡的目的:①便于测量力臂②克服杠杆自重的影响
⑷实验记录表:
⑸杠杆的平衡条件:动力×动力臂﹦阻力×阻力臂
数学表达式:F1 L1﹦F2 L2
⑹杠杆的平衡条件也称为杠杆原理,最早是由古希腊学者阿基米德总结出来的。
2.杠杆的分类:
⑴省力杠杆:①特点:动力臂大于阻力臂
②优点:省力
③缺点:费距离
④例如:羊角锤、手推车、剪铁皮的剪刀、老虎钳、撬棒等
⑵费力杠杆:①特点:动力臂小于阻力臂
②优点:省距离
③缺点:费力
④例如:筷子、镊子、笤帚、船桨、裁衣剪刀、钓鱼竿、理发的剪刀等
⑶等臂杠杆:①特点:动力臂等于阻力臂
②优点:既不省力也不省距离
③例如:托盘天平、定滑轮等
11.2滑轮
一、定滑轮
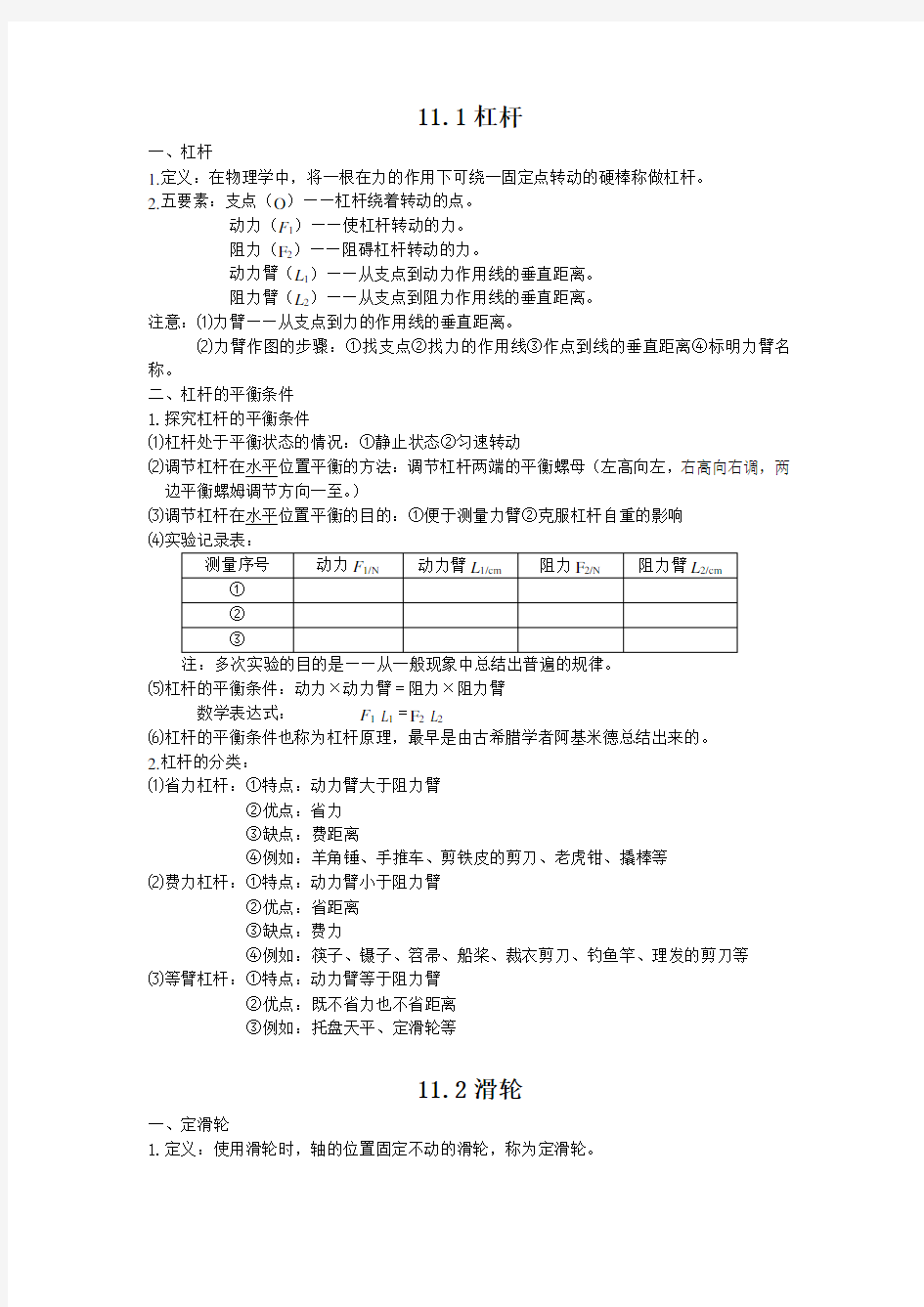
1.定义:使用滑轮时,轴的位置固定不动的滑轮,称为定滑轮。
2.实质:等臂杠杆
3.结构示意图:
4.探究使用定滑轮的特点 ⑴实验记录表
⑵定滑轮的特点:①使用定滑轮不能省力;
②使用定滑轮可以改变用力的方向; ③使用定滑轮可以改变拉力的方向,但不能改变拉力的大小(拉力的大小保持不变)。
二、动滑轮
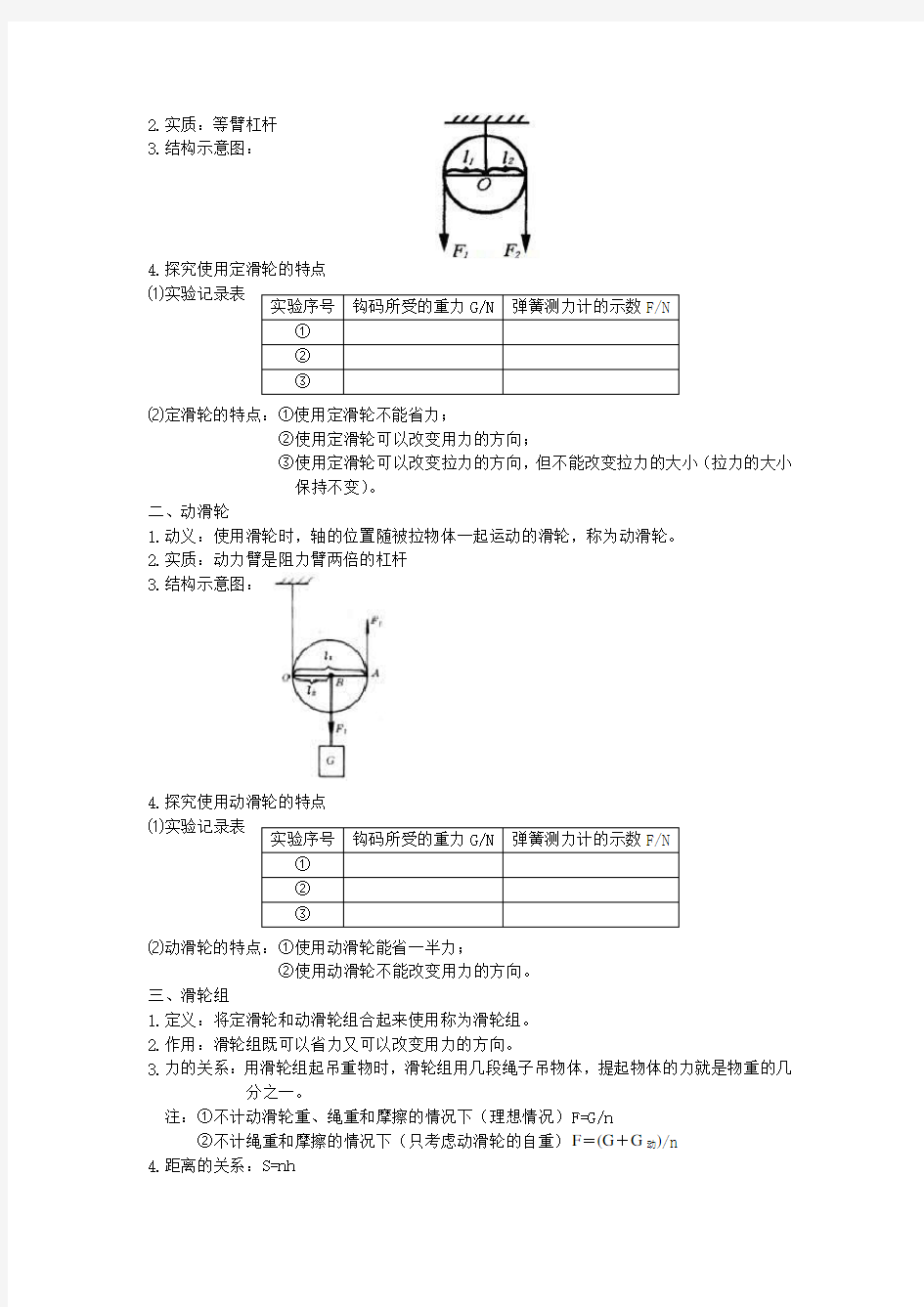
1.动义:使用滑轮时,轴的位置随被拉物体一起运动的滑轮,称为动滑轮。
2.实质:动力臂是阻力臂两倍的杠杆
3.结构示意图:
4.探究使用动滑轮的特点 ⑴实验记录表
⑵动滑轮的特点:①使用动滑轮能省一半力;
②使用动滑轮不能改变用力的方向。
三、滑轮组
1.定义:将定滑轮和动滑轮组合起来使用称为滑轮组。
2.作用:滑轮组既可以省力又可以改变用力的方向。
3.力的关系:用滑轮组起吊重物时,滑轮组用几段绳子吊物体,提起物体的力就是物重的几
分之一。
注:①不计动滑轮重、绳重和摩擦的情况下(理想情况)F=G/n
②不计绳重和摩擦的情况下(只考虑动滑轮的自重)F =(G +G 动)/n 4.距离的关系:S=nh
实验序号 钩码所受的重力G/N 弹簧测力计的示数F/N
①
② ③ 实验序号 钩码所受的重力G/N 弹簧测力计的示数F/N
①
② ③
5.速度的关系:V=nV物
6.滑轮组的绕法:奇动偶定
注:n为奇数时,从动滑轮开始;n为偶数时,从定滑轮开始。
四、轮轴和斜面
1.轮轴由具有公共转轴的轮和轴组成,轮轴也以看成是杠杆的变形,且是一种能省力的杠杆。轮轴的实例:门把手、汽车方向盘、扳手等。
2.斜面也是一种简单机械,也可以看成是杠杆的变形,且是一种能省力的杠杆。斜面的实例:供轮椅通行的斜坡、盘山公路等。
11.3功
一、探究斜面
1.实验需测量的物理量:拉力的大小F、小车通过的距离S
小车的重力G、小车上升的高度h
2.
测量序号F/N S/m G/N h/m Fs(N·m) Gh/(N·m)
①
②
③
3.实验现象:Fs与Gh近似相等
4.实验表明:如不考虑摩擦等阻力的影响,使用其他任何机械也可以得到与使用斜面时相似的结论,即没有既省力又省距离的机械。(使用任何机械都不能省功。)
二、功(符号:W)
1.定义:力与物体在力的方向上通过的距离的乘积,称为机械功,简称功。
2.公式:功=力×距离(W=Fs)
3.单位:在国际单位制中,功的单位是牛·米(N·m)。为纪念英国物理学家焦耳,将功的
单位命名为焦耳,简称焦,用字母J表示。(1J=1 N·m)
4.根据功的公式,对物体做功有两个必要条件:一是对物体要有力的作用,二是物体要在力的方向上通过一定的距离。
5.没有做功的三种情况:
①有力没有距离,例如:虽然司机费了九牛二虎之力,汽车还是纹丝不动。
②有距离没有力,例如:运动员踢了足球一下,球在草地上滚动了一段距离。
③有力有距离但不在同一方向上,例如:学生背着书包在水平路面上匀速前进。
11.4功率
一、功率(符号:P)——功率是表示物体做功快慢的物理量。
1.定义:单位时间内所做的功叫做功率。
2.公式:功率=功/时间(P=W/t)变形后可求W=Pt推导公式还有P=Fv
3.在国际单位制中,功率的单位是焦/秒(J/s)。为纪念英国工程师、发明家瓦特,将功率的单位命名为瓦特,简称瓦,用字母W表示。(1W=1J/s)
例如:人平时骑自行车的功率约为60—80W。
表示的物理意义:人骑自行车每秒做功60—80焦耳。
4.在工程技术中,常用千瓦(KW)、兆瓦(MW)等作为功率的单位。
1KW=1000W 1MW=1000KW
5.马力是曾使用过的一种功率的单位,1马力等于735瓦。
二、活动11.6估测上楼时的功率
1.需测量的物理量:人的质量m、上楼的竖直高度h、上楼的时间t
2.测量工具:磅秤(或体重秤测人的重力G)、皮卷尺、秒表
3.
4.功率表达式:P=mgh/t
11.5机械效率
一、活动11.7 再探动滑轮
1.需测量的物理量:绳受到的拉力F、手移动的距离S、
钩码受到的重力G、钩码上升的高度h
2.需要的测量工具:弹簧测力计、刻度尺
4.总功、有用功、额外功之间的关系:W总﹦W有用﹢W额外
二、机械效率(符号:η)
1.定义:在物理学中,将有用功与总功的比值,叫做机械效率。
2.机械效率通常用百分数表示:机械效率=(有用功/总功)×100℅
表达式:η=(W有用/ W总)×100℅
注:对于实际机械,由于额外功的存在,总有W有用<W总,因此η<100℅。
三、测定滑轮组的机械效率的实验
1.原理:η=(W有用/ W总)×100℅
2.器材:弹簧测力计、刻度尺、铁架台、滑轮组、钩码
3.需测量的物理量:绳受到的拉力F、手移动的距离S、
钩码受到的重力G、钩码上升的高度h
4.实验记录表:
第十二章简单机械 一、杠杆 1定义:在力的作用下绕着固定点转动的硬棒叫杠杆。 说明:①杠杆可直可曲,形状任意。 ②有些情况下,可将杠杆实际转一下,来帮助确定支点。如:鱼杆、铁锹。 2五要素──组成杠杆示意图。 ①支点:杠杆绕着转动的点。用字母O表示。 ②动力:使杠杆转动的力。用字母F1表示。 ③阻力:阻碍杠杆转动的力。用字母F2表示。 ④动力臂:从支点到动力作用线的距离。用字母L1表示。 ⑤阻力臂:从支点到阻力作用线的距离。用字母L2表示。 画力臂方法:一找支点、二画线、三连距离、四标签。 3研究杠杆的平衡条件: 杠杆平衡指:杠杆()或()。 实验前:应调节杠杆两端的螺母,使杠杆在()平衡。这样做的目的是:可以方便的从杠杆上量出力臂。 结论:杠杆的平衡条件(或杠杆原理)是: 4.分类:
达标检测: 1、在“探究杠杆平衡条件”的实验前,(1)将杠杆放在水平面上后,发现右端比左端低,这时,应将右端螺母向_____边调;实验中是靠移动来改变力臂的,靠增减来改变阻力和动力的大小的。 2、.如图3所示,OB为一轻质杠杆,O为支点,OA=0.3m,OB=0.4m,将重30N的物 体悬 挂在B点,当杠杆在水平位置平衡时,在A点至少需加__ N的拉力,这是一个__ (选 填“省力”或“费力”)杠杆. 图3 3、下列工具中:(1)镊子;(2)羊角锤;(3)铡刀;(4)理发剪刀;(5)裁衣剪刀;(6)天平;(7) 大扫帚;(8)筷子;(9)剪铁皮的剪刀;(10)道钉撬;(11)火钳;(12)起重机的起重臂;(13)撬 棒;(14)汽车的脚踏板.其中属于省力杠杆的是_______ _______,属于等臂杠杆的是________, 属于费力杠杆的是_____________.(填序号) 二、滑轮 1.定滑轮: ①定义:中间的轴固定不动的滑轮。 ②实质:等臂杠杆。
2020-2021学年度九年级物理上册课时练习:第11章简单机 械和功第2节滑轮 学校:___________姓名:___________班级:___________考号:___________ 一、单选题 1.使用如图所示的装置提升同一个物体,(不计滑轮重和摩擦)最省力的装置是A.B.C.D. 2.如图所示,吊篮的重力为400N,动滑轮总重力为100N,定滑轮总重力为50N,人的重力为600N,人在吊篮里拉着绳子不动时人需用力() A.218N B.220N C.210N D.236N 3.如图所示的各种情况中,用同样大小的力F将重物匀速提升,若不计摩擦及绳与滑轮的重力,物重最大的是() A.B.C.D. 4.要利用滑轮组匀速提升重为1200N的物体,而绳子能承受的最大拉力为300N (不计滑轮自身重和摩擦),则所用滑轮中至少使用 A.一个定滑轮一个动滑轮B.一个定滑轮、两个动滑轮 C.两个定滑轮一个动滑轮D.两个定滑轮、两个动滑轮 5.利用两个滑轮提升同一重物,滑轮重、绳重、摩擦力均不计,下图的几种组合中,最省力的组合是
A.B.C.D. 6.如图所示,分别用力F1、F2、F3匀速提起物体A,不考虑摩擦,三个力的大小关系是() A.F1<F2<F3B.F1=F2=F3C.F1>F2>F3D.F2>F1=F3 7.学校旗杆顶端装有定滑轮,这样做 A.既省力,也改变力的方向 B.省力,但不改变力的方向 C.不省力,但改变力的方向 D.既不省力,也不改变力的方向 8.如图所示,物体M放在水平桌面上.现通过一动滑轮(质量和摩擦均不计)在绳子自由端施加一拉力F,拉着M向左做匀速直线运动,此时弹簧测力计(质量可忽略)示数为10 N.若在M上加放一物块m,要保持M向左继续做匀速直线运动,需在绕过动滑轮绳子的自由端施加一拉力F′,则 A.M运动时受到向左的摩擦力 B.加放m前,M受到20 N的摩擦力 C.加放m前,M受到10 N的摩擦力 D.加放m后,力F′保持10 N不变 9.如图所示,物体A所受的重力为98 N,滑轮所受的重力为2 N,当整个装置静止时,弹簧测力计的读数是22 N,不计绳重及滑轮摩擦,物体B所受的重力是
苏教版简单机械和功知 识点归纳 Document number:NOCG-YUNOO-BUYTT-UU986-1986UT
第十一章、简单机械和功 (一)杠杆 1、杠杆:在力的作用下可以绕一固定点转动的硬棒叫做杠杆。 2、杠杆的5个要素: ①支点:杠杆绕着转动的点,用O 点表示; ②动力:使杠杆转动的动力,用1F 表示; ③阻力:阻碍杠杆转动的力,用2F 表示; ④动力臂:从支点到动力作用线的距离,用1l 表 示; ⑤阻力臂:从支点到阻力作用线的距离,用2l 表 示。 3、杠杆平衡的条件(杠杆原理): 动力×动力臂 = 阻力×阻力臂,即2211l F l F ?=? 杠杆静止或绕支点匀速转动时,说明杠杆处于平衡状态。 、杠杆的应用 名称 结构特征 特点 应用举例 省力杠杆 动力臂 > 阻力臂 省力、费距 扳手、动滑轮、钢丝钳 费力杠杆 动力臂 < 阻力臂 费力、省距 理发剪刀、钓鱼竿、筷子、船桨 等臂杠杆 动力臂 = 阻力臂 不省力、不费距 天平、定滑轮 1、滑轮是周边有槽,能绕着轴转动的小轮。 2、滑轮是一种变形杠杆,所以它也属于杠杆机械。根据工作情况,可分为定滑轮与动滑轮。 3、轴固定不动的滑轮叫定滑轮。定滑轮可以看作是一个等臂杠杆。 使用定滑轮并不能省力,但可以改变力的方向。 4、轴随物体一起移动的滑轮叫做动滑轮。动滑轮可以看作是一个省力杠杆。 使用动滑轮可以省一半力,但却不能改变用力的方向。 5、滑轮组:动滑轮与定滑轮的组合。 优点:既可省力,又可改变用力方向。 用滑轮组吊起重物时,滑轮组用几段绳子(看滑轮组下半部分)吊起物体,提起物体的力就是物重的几分之一。 6、滑轮组的应用 ①一个定滑轮与一个动滑轮: ②一个定滑轮与两个动滑轮: ③两个定滑轮与一个动滑轮: (三)功 1、功W :一个力作用在物体上,且物体沿力的方向通过了一段距离,物理学上称这个力对物体做了机械功,简称做了功。 2、计算公式:S F W ?=。 单位:焦耳(焦); 符号:J ; 即:m N J ?=11 3、做功的两个必要条件:①对物体要有力的作用; ②物体要在力的方向上通过一定的距离。 (四)功率 1、功率:单位时间内所做的功。 物理意义:表征力做功快慢的物理量。 2、计算公式:t W P =; 单位:瓦特(瓦); 符号:W ; 即s J W 11=
九上物理第十一章简单机械和功 功 一、填空题 1.从“探究斜面”实验我们看出:利用斜面提升重物可以省_______,但不能省_______.利用其他机械也可以得到类似的结论:省力的机械费_______.省距离的机械费______. 2.探究斜面,每次在小车上放不同数量的砝码,沿斜面方向匀速拉动小车,分别测出拉力的大小F、小车通过的距离s、小车及车上砝码所受重力G、上升的高度h并记录下来.分析、比较实验数据,从中能得到的结论是_______与_______近似相等. 3.力与物体在力的方向上通过距离的乘积是一个有意义的物理量,在物理学中称这一乘积为_______,简称______. 4.对物体做功的两个必要条件:一是_________;二是______. 5.(2010.河池)如图所示,是某大楼内电梯的结构示意图, 钢链的一端固定在A点,然后绕过电梯厢下的滑轮,另一端连 接在电动控制装置上.若用拉力F将重为2×104N的电梯和乘客 从一楼匀速提升到15m高的六楼,则拉力F的大小是_______ N,拉力F所做的功是_______J(不计摩擦和钢链自重). 6.在水平桌面上,将重为20N的木块沿直线匀速向前推了5m,所用的推力为4N,撤去推力后,木块由于惯性又前进了1m,则推力所做的功是_______J,重力所做的功为_______J. 7.甲、乙两物体在水平力的作用下做匀速直线运动,若甲的质量是乙的2倍,甲所受的水平力是乙的3倍,甲的速度是乙的4倍,那么在相同的时间内,水平力对甲、乙两物体做功之比为_______. 8.如图所示,重为20N的物体从斜面的顶端A滑下,若AC=3m,AB=5m,则物体从A端滑到B端时,重力对物体所做的功为_______J,支持力对物体做的功为_______J. 9.某商场二楼到三楼的自动扶梯高度是4m,扶梯长6m,孙琪同学体重500N.自动扶梯把孙琪同学从二楼运送到三楼的过程中对她做功_______J. 10.如图,某人通过定滑轮拉住重为98N的物体,当人拉绳子从A点慢慢移动到B点时,此人克服物体的重力大约做了_______J的功. 11.教学大楼每层楼高为3m,小明提着一重为50N的箱子,沿楼梯从一楼登上三楼,再沿三楼水平走廊走了4m进入教室,从一楼到教室过程中小明对箱做的总功为____. 12.如图所示,在水平拉力F作用下,使重40N的物体A匀速移动5m,物体A受到地面的摩擦力为5N,不计滑轮、绳子的重力及摩擦,拉力F做的功_______. 二、选择题 13.关于物体是否做功的说法中正确的是( ) A.起重机吊着钢筋水平匀速移动一段距离,起重机对钢筋做了功 B.被脚踢出的足球在草地上滚动的过程中,脚对足球做了功 C.小刚从地上捡起篮球的过程中,小刚对篮球做了功 D.小丽背着书包站在路边等车,小丽对书包做了功 14.一个足球运动员用100N的力踢一个重为5N的足球,球离脚后在水平草地上向前滚动了30m.在球滚动的过程中,运动员对足球做的功为( )
第十二章简单机械 、杠杆 1定义:在力的作用下绕着固定点转动的硬棒叫杠杆。 说明:①杠杆可直可曲,形状任意。 ②有些情况下,可将杠杆实际转一下,来帮助确定支点。如:鱼杆、铁锹 2五要素一一组成杠杆示意图。 ①支点:杠杆绕着转动的点。用字母0表示。 ②动力:使杠杆转动的力。用字母F i表示。 ③阻力:阻碍杠杆转动的力。用字母F2表示。 ④动力臂:从支点到动力作用线的距离。用字母L i表示。 ⑤阻力臂:从支点到阻力作用线的距离。用字母L2表示。 画力臂方法:一找支点、二画线、三连距离、四标签。 3研究杠杆的平衡条件: 杠杆平衡指:杠杆()些()。 实验前:应调节杠杆两端的螺母,使杠杆在()平衡。这样做的目的是:可以方便的从杠杆上
量出力臂 结论:杠杆的平衡条件(或杠杆原理)是: 4 .分类: 名称结构特征优缺点应用举例 省力 动力臂大于阻力臂省力、费距离撬棒、铡刀、动滑轮、轮轴、羊角锤、钢丝钳、手推车 杠杆 费力 动力臂小于阻力臂费力、省距离缝纫机踏板、起重臂、人的前臂、理发剪刀、钓鱼杆 杠杆 等臂 动力臂等于阻力臂不省力不费力天平,定滑轮 杠杆 达标检测: 1、在“探究杠杆平衡条件”的实验前,(1)将杠杆放在水平面上后,发现右端比左端低,这时,应将右端螺母向调;实 验中是靠移动来改变力臂的,靠增减来改变阻力和动力的大小的。 2、.如图3所示,0B为一轻质杠杆,0为支点,OA=0.3m,OB=0.4m,将重30N的物 体悬 挂在B点,当杠杆在水平位置平衡时,在A点至少需加___________ N的拉力,这是一个________ (选 填“省力”或“费力”)杠杆. 二图3 3、下列工具中:(1)镊子;(2)羊角锤;(3)铡刀;(4)理发剪刀;(5)裁衣剪刀;(6)天平;(7) 大扫帚;(8)筷子;(9)剪铁皮的剪刀;(10)道钉撬;(11)火钳;(12)起重机的起重臂;(13)撬 棒;(14)汽车的脚踏板.其中属于省力杠杆的是____________________ 于等臂杠杆的是 ____________ , 属于费力杠杆的是_______________ (填序号)
简单机械和功知识点归纳 第一部分、杠杆和滑轮 一、杠杆 1、杠杆的定义:一根在力的作用下能绕着固定点转动的硬棒就是杠杆。杠杆可以是直的硬棒,如撬棒等;也可以是弯的,如压井的把儿。 2、杠杆的五要素: 支点O:杠杆绕着转动的点。 动力F1: 使杠杆转动的力。 阻力F2:阻碍杠杆转动的力。 动力臂L1:从支点到动力作用线的距离。 阻力臂L2:从支点到阻力作用线的距离。 3、杠杆平衡:杠杆在力的作用下保持静止或匀速转动,杠杆就处于平衡状态。 杠杆的平衡条件是:动力×动力臂=阻力×阻力臂: F1L1= F2L2 注意:杠杆的平衡不是单独由力或力臂决定的,而是由它们的乘积来决定的。 能用杠杆的平衡条件解释、设计、解决有关问题,能进行简单计算。 4、杠杆分类: (1)省力杠杆:L1>L2,F1<F2。其动力臂L1大于阻力臂L2,平衡时动力F1小于阻力F2,即用较小的动力就可以克服较大的阻力。但是实际工作是动力移动的距离却比阻力移动的距离大,即要费距离。如撬起重物的撬棒,开启瓶盖的起子、铡草用的铡刀等,都属于这一类杠杆。 (2)费力杠杆:L1<L2,F1>F2。 这类杠杆的特点是动力臂L1小于阻力臂L2,平衡时动力F1大于阻力F2,即要用较大的动力才能克服阻力完成工作,但它的优点是杠杆工作时,动力移动较小的距离就能使阻力移动较大的距离。使工作方便,也就是省了距离。如缝纫机踏板、挖土的铁锨、大扫帚、夹煤块的火钳,这些杠杆都是费力杠杆。 (3)等臂杠杆:L1=L2,F1=F2。 这类杠杆的动力臂L1等于阻力臂L2,平衡时动力F1等于阻力F2,工作时既不省力也不费力,如天平、定滑轮就是等臂杠杆。 列表如下: 杠杆种类构造特点 应用举例优点缺点 省力杠杆L1>L2 省力费距离钳子、起子 费力杠杆L1<L2 省距离费力钓鱼杆、理发剪刀 等臂杠杆L1=L2 改变力的方向天平、翘翘板 注意:没有既省力、又省距离的杠杆。 二、定滑轮、动滑轮、滑轮组 5、定滑轮定义:轴固定不动的滑轮叫做定滑轮。特点:使用定滑轮不省力,但可以改变力的方向。 6、动滑轮定义:轴和物体一起移动的滑轮叫做动滑轮。特点:使用动滑轮可以省一半力,但不改变力的方向,且多移动一倍的距离。 7、滑轮组:由定滑轮和动滑轮组合而成的。特点:使用滑轮组会省力,可能会改变用力方向,一定费距离。 8、使用滑轮组时,重物和动滑轮由几段绳子承担,作用在绳子末端的拉力就是重物和动滑轮总重的几分之一,若动滑轮重不计,则F=G/n。
第十一章简单机械和功专题练习(解析版) 一、初三物理第十一章简单机械和功易错压轴题提优(难) 1.小红在探究杠杆的平衡条件时,找来一个量程为5N的弹簧测力计和若干个重均为0.5N 的钩码,实验前测得杠杆上相邻刻度线间的距离都等于2cm。请回答下列问题: (1)实验前,小红先将杠杆调至水平位置平衡,这样操作的目的是______; (2)小红在实验中测得一组数据如下表,于是他立即得出了杠杆的平衡条件: “F1×L1=F2×L2”,你认为是否合理,并说明理由:______; F1/N L1/cm F2/N L2/cm 2634 (3)某次实验如图所示,杠杆平衡,则以下生活中相关杠杆的应用与此图中杠杆类型相同的是______(选填“托盘天平”、“核桃夹”或“筷子”); (4)在上图中,保持弹簧测力计的位置及拉力的方向和钩码的个数不变,钩码向左移动,若要保持杠杆平衡,则钩码到支点的距离不应超过______cm。 【答案】便于直接测量力臂不合理,只有一组实验数据,得到的结论具有偶然性核桃夹 10cm 【解析】 【分析】 【详解】 (1)[1]在探究杠杆的平衡条件时,为了便于直接测量力臂,我们将杠杆调至水平位置平衡。 (2)[2]在探究杠杆的平衡条件时,我们需要进行多次实验得到多组实验数据是结论具有普遍性,实验中由一组实验数据得到的结论具有偶然性。 (3)[3]如图所示,弹簧测力计对杠杆施加拉力的力臂大于钩码对杠杆施加拉力的力臂,是一个省力杠杆;而托盘天平是一个等臂杠杆,核桃夹是一个省力杠杆,筷子夹菜时相当于一个费力杠杆;所以与此图中杠杆类型相同的是核桃夹。 (4)[4]杠杆上相邻刻度线间的距离都等于2cm,每个钩码重均为0.5N,则图中钩码的总重力为 0.5N63N G=?= 弹簧测力计施加拉力的力臂 L=?= 2cm36cm 右 钩码向左移动,若要保持杠杆平衡,弹簧测力计量程为5N,由杠杆平衡条件可知,钩码对杠杆施加拉力的最大力臂
简单机械和功 (一)杠杆 1、杠杆:在力的作用下可以绕一固定点转动的硬棒叫做杠杆。 2、杠杆的5个要素: ①支点:杠杆绕着转动的点,用O点表示; ②动力:使杠杆转动的动力,用 1 F表示; ③阻力:阻碍杠杆转动的力,用 2 F表示; ④动力臂:从支点到动力作用线的距离,用 1 l表示; ⑤阻力臂:从支点到阻力作用线的距离,用 2 l表示 3、画力臂练习 方法:1)找支点 2)画力的作用线 3)通过支点向力的作用线画垂线 4)大括号,垂足符号,字母 4.最小力画法 1)支点与杠杆末端相连 2)力垂直于杠杆末端 从A点搬动柜子从M端抬起均匀木棒把水倒入杯中
5杠杆平衡的条件(杠杆原理): 动力×动力臂 = 阻力×阻力臂,即2211l F l F ?=? 杠杆静止或绕支点匀速转动时,说明杠杆处于平衡状态 6杠杆平衡条件的计算: 例题1.假如在一跷跷板中大人重750N,小女孩重250N 。当大人离跷跷板的转轴0.5m 时,小女孩应该坐在哪里才能使跷跷板平衡? 例题2.如图,一轻质杆OA 一端固定在竖直墙上,可绕O 点转动,已知0A=0.3cm ,OB=0.2cm ,在A 点处悬挂一重物G,质量为2kg ,若在B 处施一竖直向上的拉力F,使杠杆在水平线上平衡,此时拉力F 为多少? 例题3.如图:OB=2B A,物体重为60N,不计杠杆自身重力,绳与杆的夹角为30℃,则绳的拉力为多少? 4、杠杆平衡的条件实验 例题1.在“探究杠杆的平衡条件”实验中,应先调节杠杆两端的平衡螺母, 使杠杆在____位置平衡,这样做是为了便于测量____.如发现杠杆左端偏高,则可将右端的平衡螺母向_____调节,此后在整个实验过程中,能否再旋动两端的平衡螺母?______. 下图是小明同学三次实验的情景,实验时所用的每个钩码重均为0.5N ,杠杆上刻线的间距为5cm,部分实验数据记录如下表: 实验次数 动力F 1/N 动力臂L 1/cm 阻力F 2/N 阻力臂L2/c m 1 1.5 10 1 2 1 20 10 3 1 20 1.5 10 (1)请将表格中的实验数据补充完整. (2)小明的第3次实验记录中有一个数据明显错误,它是_________,错误原因是_________ ____________. (3)某次测量中,在如图14所示的条件下杠杆已处于平衡状态.若小明同时拿走两边下方的两个 钩码,则杠杆的________(“左”或“右”)端将下沉.为使杠杆恢复水平平衡,小明应将左侧剩余的两个钩码移至________点处.
第十一章《简单机械和功》同步练习(苏科版初三上) (11) 纲要检测 自主评估 基础与巩固 1 .将重为5N 和15N 的甲、乙两物体分不挂在杠杆的左、右两端,假设杠杆的重力忽略不计,当杠杆平稳时,左、右两力臂长之比为 〔 〕 A .3:1. B .2:1. C .1:3. D .4:1. 2.一杆刻度准确的杆秤,假设其秤砣上粘上一块重物,那么用它秤东西时,其读数 〔 〕 A .将比实际质量大. B .与实际质量相同. C .将比实际质量小. D .大小难以确定. 3.下面的实例中,相当于费劲、省距离的杠杆是 〔 〕 A .独轮推车. B .动滑轮. C .人的前臂. D .老虎钳. 4.用图11-29所示的滑轮组,将重为10N 的物体匀速提升0.1m ,拉力F =6N , 在这一过程中,以下讲法正确的选项是 一点、二力、二臂与作图 杠杆的平稳条件________________ 杠杆 省力杠杆_________ 杠杆的应用 费劲杠杆_________ 等臂杠杆_________ 特点_________________________ 实质_________________________ 特点_________________________ 实质_________________________ 滑轮组 ______________________________ 轮轴 _________________ 定滑轮 滑轮 动滑轮 简单机械 做功的两个必要因素___________________________ 功 功的运算 __________ 功的单位 __________ 内容:_____________________________ 应用:斜面 定义:_____________________________ 机械效率 表达式:__________ 测滑轮组的机械效率:器材、原理、步骤 定义与物理意义_____________________ 功率 表达式 __________________ 单位与换算 _____________ 功的原理 功 F
简单机械和功—杠杆 1.在______的作用下,能绕一_________转动的________叫做杠杆.杠杆可以是直的,也可以是_______的. 2.下列说法中正确的是() A.杠杆都是直的硬棒B.力臂是力的作用点到支点的距离 C.力臂是支点到力的作用线的距离D.杠杆的动力臂总是大于阻力臂 3.如图所示的杠杆中,动力的力臂用L表示,图中所画力臂正确的是() 4.在棉产区,每年秋天拔去地里的棉杆是农民的一项繁重体力劳动。王刚 仿照钳子的结构改制成一种农具解决了这一问题。如图所示,使用时, 将小铲着地,用虎口夹住棉杆的下部,然后在套管上用力,棉杆就拔出 来了。该农具整体视为杠杆,则支点、动力作用点、阻力作用点对应下列位置正确的是()A.转轴—虎口—套管B.小铲—套管—虎口 C.小铲—虎口—套管D.虎口—转轴—套管 5.如图所示,用一根硬棒撬一个大石块,棒的上端A是动力作用点.请在图上 标出:(1)当动力方向向上时,杠杆的支点a;(2)当动力方向向下时,杠杆的 支点b. 6.如图所示,杠杆OA处于平衡状态,在图中分别画出力F 1和F 2 对支点0的力臂L 1 和L 2 。. 7.在下图中画出力F 1、F 2 的力臂l1、l2。 第11章简单机械和功—杠杆随堂练习题二 1.杠杆的平衡条件是_________(用文字表示),写成数学表达式为________. 2.一杠杆受到的动力和阻力分别是6N和30N,当杠杆平衡时,动力臂与阻力臂之比是______________.3.若作用在杠杆上的动力是40N,动力臂是阻力臂的3倍,那么杠杆平衡时,阻力的大小为___________N.4.如图所示,一均匀杠杆A处挂2个钩码,B处挂1个钩码,杠杆恰好平衡,若钩码质量均为50g,在A. B两处再各加一个钩码,那么:() A.杠杆仍平衡B.杠杆左边向下倾
九年级物理第十一章简单机械和功(篇)(Word版含解析) 一、初三物理第十一章简单机械和功易错压轴题提优(难) 1.在“探究杠杆平衡条件的实验”中: (1)图甲中,杠杆静止时处于_________(选填“平衡”或“不平衡”)状态.为使杠杆在水平位置平衡,小明应将杠杆两端的平衡螺母向_______(选填“左”或“右”)移。(2)如图乙所示,在A 点挂 2 个重力均为 0.5N 的钩码,在B 点用弹簧测力计竖直向下拉杠杆,使其在水平位置平衡,弹簧测力计的示数为______________N。 (3)如图丙,保持A 点所挂砝码的数量和位置不变,将弹簧测力计绕B 点从a 位置转到b 位置,杠杆始终保持水平平衡,在此过程中拉力F 与其力臂的乘积变化情况是 ______________。 A.一直变小 B.一直变大 C.一直不变 D.先变小后变大 (4)竖直向下拉弹簧测力计,使杠杆从水平位置缓慢转过一定角度,如图丁所示,此过程中,拉力的力臂_________,弹簧测力计的示数__________(均选填“变大”、“变小”
或“不变”)。 (5)若要使图丁状态下的弹簧测力计读数减小,可将弹簧测力计绕B 点 _____(选填“顺时针”或“逆时针”)方向转动一个小角度。 (6)小华用如图戊装置进行探究,发现总是无法得到教材上所列出的杠杆平衡条件,其原因是_____________________________________。 (7)小明用如图戊所示的实验装置研究“杠杆的机械效率”.实验时,将总重为G 的钩码挂在杠杆A 处,竖直向上匀速拉动弹簧测力计,钩码上升的高度为h,弹簧测力计的示数为F,其移动的距离为s,则杠杆的机械效率η=__________(用题中字母表示)。若将钩码移动到B 点,仍将它匀速提升h 的高度,则此时弹簧测力计的示数F'________(选填 “>”“=”或“<”)F,杠杆此时的机械效率η′___________η(选择“>”、“=”或“<”)。 【答案】平衡左 1.5 C 变小不变顺时针杠杆自重对杠杆平衡有影响 Gh ×100% > > Fs 【解析】 【分析】 【详解】 (1)[1]杠杆处于静止状态或匀速转动状态都为杠杆的平衡状态;所以,图甲中实验前没挂钩码时,杠杆处于静止的平衡状态。 [2]由于杠杆左端上翘,调节时重心应向左移动,应将杠杆两端的平衡螺母向左移,使杠杆在水平位置平衡。 (2)[3]如图乙所示,在刻度线A处挂两个钩码,在刻度线B处用调好的弹簧测力计竖直向下拉杠杆,杠杆在水平位置时,每个钩码为G=0.5N,每小格为L,根据杠杆的平衡条件知道,即 2G×3L=F×2L 2×0.5N×3L=F×2L 解得F=1.5N (3)[4]将测力计绕B点从a位置转动到b位置过程中,钩码的重力不变,其力臂OA不变,即阻力与阻力臂的乘积不变;由于杠杆始终保持水平平衡,所以根据杠杆的平衡条件知道,拉力F与其力臂的乘积也是不变的。 故选C。 (4)[5][6]力臂等于支点到力的作用线的距离,竖直向下拉弹簧测力计,使杠杆从水平位置缓慢转过一定角度,如图丁所示,此过程中,弹簧测力计拉力的力臂变小,钩码对杠杆拉力的力臂也变小,但是根据三角形的相似性,动力臂和阻力臂的比值是不变的,所以拉力大小不变。 (5)[7]根据杠杆平衡条件知道,要使弹簧测力计读数减小,在阻力和阻力臂不变时,需要增大动力臂,当弹簧测力计与杠杆垂直时,动力臂最长,拉力最小,所以需要将弹簧测力计顺时针转动。
九年级物理第十一章简单机械和功 §11.1 杠杆 1.在物理学中,将一根在力的作用下可绕一固定点转动的硬棒叫做杠杆。 2.杠杆的平衡条件F1·L1=F2·L2。 3.①若L1>L2,F1<F2,则是省力杠杆,费距离; ②若L1
三、滑轮组: 1.滑轮组用几段绳子吊物体,提起物体的力就是物重的几分之一。2 . 3. 四、水平放置滑轮: S=n S物 V=n V物 四、如何设计滑轮: G=Fn-G动 G动=Fn-G
§11.3功 1.力与物体在力的方向通过的距离的乘积,叫做功。 2.W=Fs 3.1J=1N·m 4.做功条件:一是对物体要有力的作用,二是物体要在力的方向上通过一定的距离。 5.不做功的情况: ①F≠0,S=0。有力没距离,W=0 ②F=0,S≠0。有距离没力,W=0 ③F≠0,S≠0。F⊥S §11.4 功率 1.单位时间内所做的功叫功率。 2. 3.1W=1J/s 4.1KW=1000W 1MW=1000000 1马力=735W §11.5 机械功率 1.利用任何机械都不能省功,但动力所做的功也不会无缘无故消失。 2.总功:动力对机械所做的功。 有用功:对我们有用的功(机械对物体所做的功)。
厦门市双十中学物理第十一章简单机械和功同步单元检测(Word版含答案) 一、初三物理第十一章简单机械和功易错压轴题提优(难) 1.如图,小明在“研究杠杆平衡条件”的实验中所用的实验器材有:刻度均匀的杠杆,支架,弹簧测力计,刻度尺,细线和相同的重0.5 N重的钩码若干个。 (1)如图A所示,实验前,杠杆左侧下沉,则应将左端的平衡螺母向______(选填“左”或”右”)调节,直到杠杆在水平位置平衡; (2)在图B中杠杆平衡了,若在杠杆左右两边同时增加一个相同的钩码,则杠杆向______(选填“左”或”右”)倾斜; (3)甲同学通过对一组数据分析后得出的结论是:动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离,与小组同学交流后,乙同学为了证明甲同学的结论是错误的,他做了如图C的实验,已知杠杆上每个小格长度为5 cm,每个钩码重0.5 N,当弹簧测力计斜向上拉(与水平方向成30°角)杠杆,使杠杆在水平位置平衡,此时乙同学发现,动力×动力臂______(选填“等于”或“不等于”)阻力×阻力臂。实验C______(选填“能”或”不能”)说明甲同学结论是错误的。 【答案】右右等于能 【解析】 【分析】 【详解】 (1)[1]图A中,杠杆左侧下沉,应向右调节平衡螺母,直到杠杆在水平位置平衡。 (2)[2]在图B中,据杠杆的平衡条件得 3G?2F=2G?3L 在左右两边同时增加一个相同的钩码,则左右两边分别变成 4G?2F,3G?3L 而 4G?2F<3G?3L 所以杠杆向右倾斜。 (3)[3][4]由图C知,此时 4×0.5N×3×0.5cm=3N×1 2 ×4×0.5cm 即:动力×动力臂=阻力×阻力臂。而此时,动力臂并不等于支点到动力作用点的距离,所以能证明甲同学的结论是错误的。 2.小军利用如图所示器材测定滑轮组的机械效率,他记录的实验数据如下表。
第十一章简单机械和功达标检测(Word版含解析) 一、初三物理第十一章简单机械和功易错压轴题提优(难) 1.小苗利用刻度均匀的轻质杠杆进行“探究杜杆的平衡条件”实验,已知纡个钩码重 0.5N。 (1)实验前,将杠杆的中点置于支架上,当杠杆静止时,发现杠杆左端下沉,这时应将平衡螺母向__________(选填“左”或“右”)调节,直到杠杆在水平位置半衡。 (2)在图甲中的A点悬挂4个钩码,要使杠杆仍保持水平位置平衡,需在B点悬挂_______个钩码。 (3)如图乙所示,取走悬挂在B点的钩码,改用弾簧测力计在C点竖直向上拉,仍使杠杆在水平位置平衡,测力计的拉力为__________N;若在C点改变弹簧测力计拉力的方向,使之斜向右上方,杠杆仍然在水平位置平衡,则测力计的读数将__________(选填“变 大”“变小”或“不变”)。 【答案】右 3 1.5 变大 【解析】 【分析】 【详解】 (1)[1]杠杆在使用前左端下沉,说明左侧力与力臂的乘积大,应将平衡螺母向右调节。 (2)[2]设杠杆每个格的长度为L,每个钩码的重力为G,根据杠杆的平衡条件:F A L A=F B L B,得 4G×3L=F B×4L 解得 F B=3G 即需在B点处挂3个钩码。 (3)[3]取走悬挂在B点的钩码,改用弹簧测力计在C点竖直向上的拉力,根据杠杆的平衡条件:F A L A=F C L C,得 4G×3L=F C×4L 解得 F C=3G=3×0.5N=1.5N [4]如改变弹簧测力计拉力的方向,使之斜向右上方,阻力和阻力臂不变,动力臂减小,动力要增大,所以弹簧测力计示数变大,才能使杠杆仍然水平平衡。 2.小红在探究杠杆的平衡条件时,找来一个量程为5N的弹簧测力计和若干个重均为0.5N 的钩码,实验前测得杠杆上相邻刻度线间的距离都等于2cm。请回答下列问题: (1)实验前,小红先将杠杆调至水平位置平衡,这样操作的目的是______;
简单机械和功知识点总结 一、 认识和利用杠杆 1、 杠杆 (1) 杠杆的定义:在力的作用下能绕固定点转动的硬棒。 (2) 影响杠杆的五要素: 支点:杠杆绕着转动的固定点; 动力:使杠杆转动的力F1; 阻力:阻碍杠杆转动的力F2; 动力臂:从支点到动力作用线的距离1l ; 阻力臂:从支点到阻力作用线的距离2l ; (方法提示:一找点;二画线;三作垂线段) 2、 杠杆的平衡条件 (1) 杠杆的平衡:杠杆处于静止或匀速转动状态 (2) 杠杆平衡条件:动力×动力臂=阻力×阻力臂,即F11l = F22l 或:动力臂是阻力臂的几倍,动力就是阻力的几分之一。即力与力臂成反比。2 1 12F F l l = 3、 三种杠杆及应用举例: (1) 省力杠杆:当1l >2l 时,F1
5、欲使已平衡的杠杆在改变力或力臂后再次平衡,则应有改变后的两侧的力与力臂的乘积相等,或者是两边的力或力臂同时改变相同的倍数。(不是相同的大小) 6、杠杆两端挂同种金属块平衡后,同时没入水中,杠杆仍然平衡;若挂不同种金属块,则杠杆失去平衡,密度较大的一端下沉。 二、认识和利用滑轮 1、认识滑轮和滑轮组 实质力的关 系 (F,G) 距离关 系 (s,h) 速度关 系 (v,0v) 作用 定滑 轮等臂杠杆F=G s=h v=0v 改变力的方向, 既不省力也不省距离 动滑轮动力臂是阻 力臂两倍的 杠杆 F= 1 2 G s=2h v=20v 省一半力, 费距离 滑轮 组F= 1 n G s=nh v=n0v 既可省力又能改变力 的方向 费距离 (忽略摩擦,G=G物+G动滑轮) 2、滑轮组用力情况的判断 判断用力情况的关键是弄清几段绳子承担动滑轮和重物,在数绳子时,不但要明确绳子是否承担动滑轮和重物的重力,还要看清滑轮组的组装方式,不能只看滑轮个数。3、滑轮组绳子段数n与动滑轮个数m之间的关系:n=2m或n=2m+1。 n为偶数时,绳子起点在定滑轮上;n为奇数时,绳子起点在动滑轮上。 4、在给滑轮组绕绳时,若要求人站在地上拉动重物上升。则绳子最后必定穿过定滑轮,拉
九年级物理上册第十一章简单机械和功同步单元检测(Word版含答案) 一、初三物理第十一章简单机械和功易错压轴题提优(难) 1.如图,小明在“研究杠杆平衡条件”的实验中所用的实验器材有:刻度均匀的杠杆,支架,弹簧测力计,刻度尺,细线和相同的重0.5 N重的钩码若干个。 (1)如图A所示,实验前,杠杆左侧下沉,则应将左端的平衡螺母向______(选填“左”或”右”)调节,直到杠杆在水平位置平衡; (2)在图B中杠杆平衡了,若在杠杆左右两边同时增加一个相同的钩码,则杠杆向______(选填“左”或”右”)倾斜; (3)甲同学通过对一组数据分析后得出的结论是:动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离,与小组同学交流后,乙同学为了证明甲同学的结论是错误的,他做了如图C的实验,已知杠杆上每个小格长度为5 cm,每个钩码重0.5 N,当弹簧测力计斜向上拉(与水平方向成30°角)杠杆,使杠杆在水平位置平衡,此时乙同学发现,动力×动力臂______(选填“等于”或“不等于”)阻力×阻力臂。实验C______(选填“能”或”不能”)说明甲同学结论是错误的。 【答案】右右等于能 【解析】 【分析】 【详解】 (1)[1]图A中,杠杆左侧下沉,应向右调节平衡螺母,直到杠杆在水平位置平衡。 (2)[2]在图B中,据杠杆的平衡条件得 3G?2F=2G?3L 在左右两边同时增加一个相同的钩码,则左右两边分别变成 4G?2F,3G?3L 而 4G?2F<3G?3L 所以杠杆向右倾斜。 (3)[3][4]由图C知,此时 4×0.5N×3×0.5cm=3N×1 2 ×4×0.5cm 即:动力×动力臂=阻力×阻力臂。而此时,动力臂并不等于支点到动力作用点的距离,所以能证明甲同学的结论是错误的。 2.在探究”杠杆平衡条件”的实验中:
第十一章简单机械和功知识归 纳 -CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN
简单机械和功知识点归纳 第一部分、杠杆和滑轮 一、杠杆 1、杠杆的定义:一根在力的作用下能绕着固定点转动的硬棒就是杠杆。杠杆可以是直的硬棒,如撬棒等;也可以是弯的,如压井的把儿。 2、杠杆的五要素: 支点O:杠杆绕着转动的点。 动力F1: 使杠杆转动的力。 阻力F2:阻碍杠杆转动的力。 动力臂L1:从支点到动力作用线的距离。 阻力臂L2:从支点到阻力作用线的距离。 3、杠杆平衡:杠杆在力的作用下保持静止或匀速转动,杠杆就处于平衡状态。 杠杆的平衡条件是:动力×动力臂=阻力×阻力臂: F1L1= F2L2 注意:杠杆的平衡不是单独由力或力臂决定的,而是由它们的乘积来决定的。 能用杠杆的平衡条件解释、设计、解决有关问题,能进行简单计算。 4、杠杆分类: (1)省力杠杆:L1>L2,F1<F2。其动力臂L1大于阻力臂L2,平衡时动力F1小于阻力F2,即用较小的动力就可以克服较大的阻力。但是实际工作是动力移动的距离却比阻力移动的距离大,即要费距离。如撬起重物的撬棒,开启瓶盖的起子、铡草用的铡刀等,都属于这一类杠杆。(2)费力杠杆:L1<L2,F1>F2。 这类杠杆的特点是动力臂L1小于阻力臂L2,平衡时动力F1大于阻力F2,即要用较大的动力才能克服阻力完成工作,但它的优点是杠杆工作时,动力移动较小的距离就能使阻力移动较大的距离。使工作方便,也就是省了距离。如缝纫机踏板、挖土的铁锨、大扫帚、夹煤块的火钳,这些杠杆都是费力杠杆。 (3)等臂杠杆:L1=L2,F1=F2。 这类杠杆的动力臂L1等于阻力臂L2,平衡时动力F1等于阻力F2,工作时既不省力也不费力,如天平、定滑轮就是等臂杠杆。 列表如下: 杠杆种类构造特点 应用举例优点缺点 省力杠杆L1>L2省力费距离钳子、起子 费力杠杆L1<L2省距离费力钓鱼杆、理发剪刀 等臂杠杆L1=L2改变力的方向天平、翘翘板 二、定滑轮、动滑轮、滑轮组 5、定滑轮定义:轴固定不动的滑轮叫做定滑轮。特点:使用定滑轮不省 力,但可以改变力的方向。 6、动滑轮定义:轴和物体一起移动的滑轮叫做动滑轮。特点:使用动滑轮 可以省一半力,但不改变力的方向,且多移动一倍的距离。 7、滑轮组:由定滑轮和动滑轮组合而成的。特点:使用滑轮组会省力,可 能会改变用力方向,一定费距离。
(苏科版)2020-2021学年度九年级物理上册课时练习:第11章简单机械和功第5节机械效率 学校:___________姓名:___________班级:___________考号:___________ 一、单选题 1.甲乙两机械,甲的机械效率是70%、乙的机械效率是50%,下列说法中正确的是()A.使用甲机械做功省力 B.甲机械做功快 C.相同时间内,甲机械完成的功多 D.乙机械的额外功在总功中占的比例大 2.用规格相同的滑轮安装成甲、乙两个滑轮组提升重物,如图所示。已知 G1=150N,G2=200N,动滑轮重G动=50N,滑轮与轴的摩擦忽略不计。设甲的机械效率为η1,乙的机械效率为η2,则下列关系正确的是() A.F1<F2,η1<η2B.F1>F2,η1>η2C.F1>F2,η1<η2D.F1<F2,η1>η2 3.小明用如图所示的甲、乙两个滑轮组,分别在相同时间内将同一重物匀速提升相同高度,每个滑轮的重均相等,不计绳重及摩擦,针对这一现象,小明得出了4个结论:①F1做的功等于F2做的功;②甲滑轮组的机械效率等于乙滑轮组的机械效率;③使用乙滑轮组比甲滑轮组更加省力;④F1做功的功率等于F2做功的功率;其中正确的为() A.①、②、③B.②、③、④C.①、③、④ D.①、②、③、④ 4.一台电动机的额定电压是220V,其电阻是2Ω.正常工作时,通过的电流为5A,忽
略各种摩擦,则电动机正常工作时将电能转化为机械能的效率约为( ) A .100% B .95% C .90% D .80% 5.如图所示的滑轮组中,动滑轮重1N ,小强用6N 的拉力F 通过该滑轮组匀速拉起重10N 的物体,物体沿竖直方向上升0.4m .此过程中,额外功和机械效率分别是( ) A .0.4J 83.3% B .0.8J 91.7% C .0.8J 83.3% D .0.4J 91.7% 6.工人用如图所示的动滑轮,将重1000N 的物体在5s 内匀速竖直提升了1m,人对绳自由端的拉力F 为600N,不计绳重和摩擦.以下结论正确的是( ) A .动滑轮的有用功为600J B .动滑轮的重力为400N C .动滑轮的机械效率为83.3% D .拉力F 的功率为120W 7.某实验小组利用图示装置研究杠杆的机械效率.保持O 点位置不变,竖直向上拉动弹簧测力计使重为G 的钩码缓慢匀速上升,在此过程中弹簧测力计的读数为F ,利用刻度尺分别测出C 、B 两点上升的高度为h 1、h 2 . 则下列说法正确的是 A .杠杆机械效率的表达式为21 Fh Gh B .杠杆机械效率的表达式为12 Gh Fh C .在如图水平位置拉升时F×OB=G× OA
11.1杠杆 一、杠杆 1.定义:在物理学中,将一根在力的作用下可绕一固定点转动的硬棒称做杠杆。 2.五要素:支点(O)——杠杆绕着转动的点。 动力(F1)——使杠杆转动的力。 阻力(F2)——阻碍杠杆转动的力。 动力臂(L1)——从支点到动力作用线的垂直距离。 阻力臂(L2)——从支点到阻力作用线的垂直距离。 注意:⑴力臂——从支点到力的作用线的垂直距离。 ⑵力臂作图的步骤:①找支点②找力的作用线③作点到线的垂直距离④标明力臂名称。 二、杠杆的平衡条件 1.探究杠杆的平衡条件 ⑴杠杆处于平衡状态的情况:①静止状态②匀速转动 ⑵调节杠杆在水平位置平衡的方法:调节杠杆两端的平衡螺母(左高向左,右高向右调,两边平衡螺姆调节方向一至。) ⑶调节杠杆在水平位置平衡的目的:①便于测量力臂②克服杠杆自重的影响 ⑷实验记录表: ⑸杠杆的平衡条件:动力×动力臂﹦阻力×阻力臂 数学表达式:F1 L1﹦F2 L2 ⑹杠杆的平衡条件也称为杠杆原理,最早是由古希腊学者阿基米德总结出来的。 2.杠杆的分类: ⑴省力杠杆:①特点:动力臂大于阻力臂 ②优点:省力 ③缺点:费距离 ④例如:羊角锤、手推车、剪铁皮的剪刀、老虎钳、撬棒等 ⑵费力杠杆:①特点:动力臂小于阻力臂 ②优点:省距离 ③缺点:费力 ④例如:筷子、镊子、笤帚、船桨、裁衣剪刀、钓鱼竿、理发的剪刀等 ⑶等臂杠杆:①特点:动力臂等于阻力臂 ②优点:既不省力也不省距离 ③例如:托盘天平、定滑轮等 11.2滑轮 一、定滑轮 1.定义:使用滑轮时,轴的位置固定不动的滑轮,称为定滑轮。
2.实质:等臂杠杆 3.结构示意图: 4.探究使用定滑轮的特点 ⑴实验记录表 ⑵定滑轮的特点:①使用定滑轮不能省力; ②使用定滑轮可以改变用力的方向; ③使用定滑轮可以改变拉力的方向,但不能改变拉力的大小(拉力的大小保持不变)。 二、动滑轮 1.动义:使用滑轮时,轴的位置随被拉物体一起运动的滑轮,称为动滑轮。 2.实质:动力臂是阻力臂两倍的杠杆 3.结构示意图: 4.探究使用动滑轮的特点 ⑴实验记录表 ⑵动滑轮的特点:①使用动滑轮能省一半力; ②使用动滑轮不能改变用力的方向。 三、滑轮组 1.定义:将定滑轮和动滑轮组合起来使用称为滑轮组。 2.作用:滑轮组既可以省力又可以改变用力的方向。 3.力的关系:用滑轮组起吊重物时,滑轮组用几段绳子吊物体,提起物体的力就是物重的几 分之一。 注:①不计动滑轮重、绳重和摩擦的情况下(理想情况)F=G/n ②不计绳重和摩擦的情况下(只考虑动滑轮的自重)F =(G +G 动)/n 4.距离的关系:S=nh 实验序号 钩码所受的重力G/N 弹簧测力计的示数F/N ① ② ③ 实验序号 钩码所受的重力G/N 弹簧测力计的示数F/N ① ② ③