
计算机仿真技术作业一
研究题目:转速反馈单闭环直流调速系统仿真
1、开环仿真:
(一)实验要求:
直流电机模型框图如下图所示,仿真参数为R =0.6,T l =0.00833,T m =0.045,Ce=0.1925。本次仿真采用算法为ode45,仿真时间5s 。 1/1+s T R l s T R m e C 10d u d
I +
--+n
图1 直流电机模型
① 用simulink 实现上述直流电机模型,直流电压U d0取220V ,
0~2.5s ,电机空载,即I d =0;
2.5s~5s ,电机满载,即I d =55A 。
② 画出转速n 的波形,根据仿真结果求出空载和负载时的转速n 以及静差率s 。改变仿真算法,观察效果(运算时间、精度等)。
(二)实验内容:
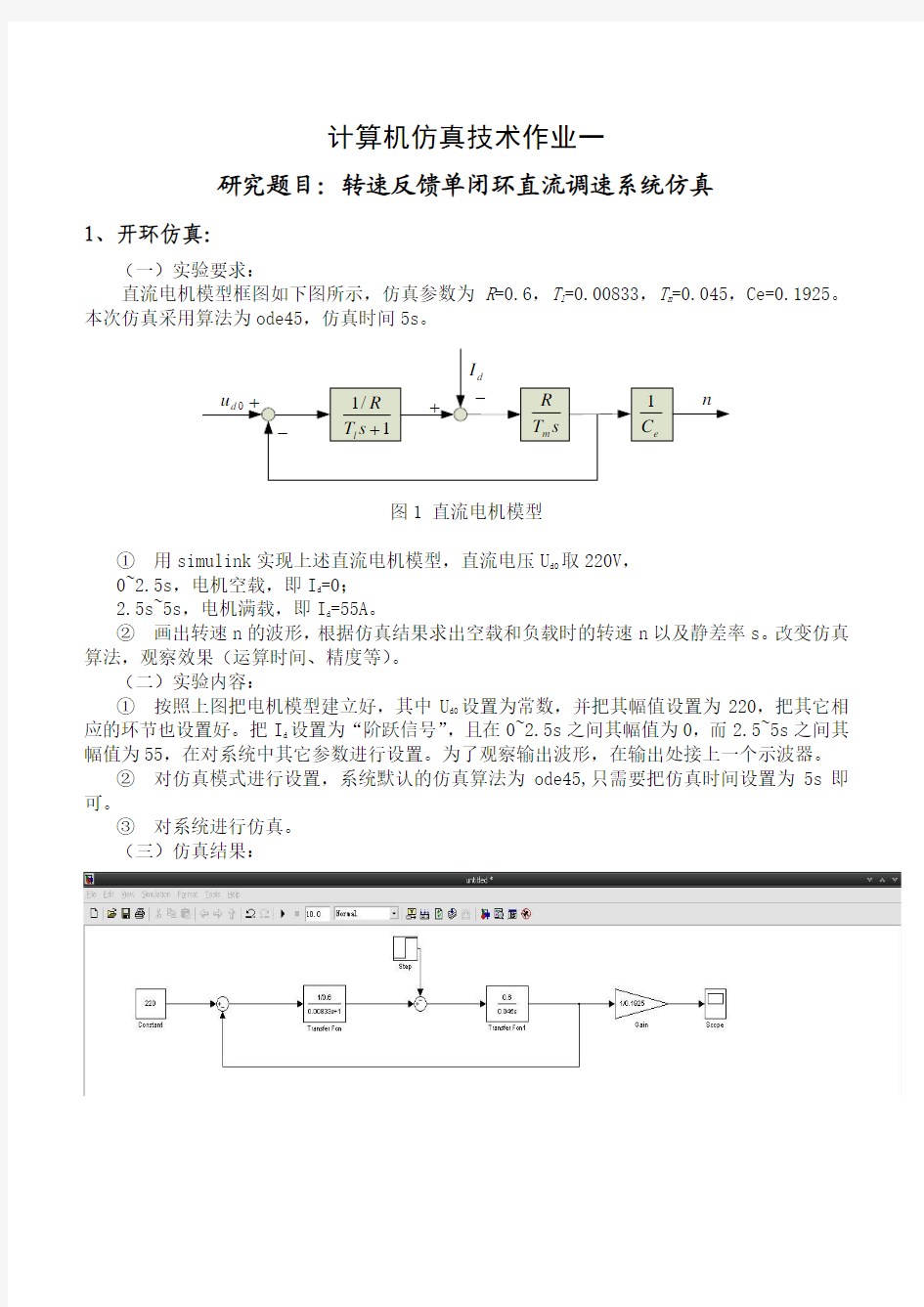
① 按照上图把电机模型建立好,其中U d0设置为常数,并把其幅值设置为220,把其它相
应的环节也设置好。把I d 设置为“阶跃信号”,且在0~2.5s 之间其幅值为0,而2.5~5s 之间其
幅值为55,在对系统中其它参数进行设置。为了观察输出波形,在输出处接上一个示波器。 ② 对仿真模式进行设置,系统默认的仿真算法为ode45,只需要把仿真时间设置为5s 即可。
③ 对系统进行仿真。
(三)仿真结果:
上图即为电机转速的仿真结果图,上图分为两个阶段,第一个阶段(0~2.5s )为空载转速,
第二阶段(2.5~5s )为满载转速。空载转速为1147r/min 。在2.5s 时加入了负载,通过仿真结果我们可以看出来,负载转速为976r/min 。可以看出在加入负载之后,电机的转速开始下降。
静差率(转速变化率)是指电动机在一定转速下运行时,负载由理想空载变到满载时所产生的转速降落与理想空载转速之比值。静态率越小,稳定性越高。只有设法减小静态速降Δn 才能扩大调速范围,减小静差率,提高转速的稳定度。
根据电机转差率的公式149.01147976114700=-=-=n n
n s 。转差率还是比较小的,说明该电机效
率比较高。
关于仿真算法的区别:
ode45是基于显式Rung-Kutla (4,5) 和Dormand- Prince 组合的算法,它是一种一步解法,即只要知道前一时间点的解y(tn-1),就可以立即计算当前时间点的方程解y (tn)。对大多数仿真模型来说,首先使用ode45 来解算模型是最佳的选择,所以在SIMULINK 的算法选择中将ode45 设为默认的算法。
ode23 是基于显式Rung-Kutta (2 , 3) 、Bogacki 和Shampine 相结合的算法,它也是一种一步算法。在容许误差和计算略带刚性的问题方面,该算法比ode45 要好。更换算法后,静差率基本没有变化,但ode23与ode45比系统震荡变大,且ode23的计算精度不太高,所以ode23一般用于计算精度不太高的场合。
odel13是可变阶数的Adams-Bash forth-Moulton PECE 算法,在误差要求很严时,odel13 算法较ode45 更适合。odel13 是一种多步算法,也就是需要知道前几个时间点的值,才能计算出当前时间点的值。仿真结果大致和上面几种运算方法的结果一致。但运算时间比上述三种方法的运算时间都要长。且系统振荡频率过大,稳定性变差。
ode15s 是一种基于数字微分公式的解法器(NDFs ),它相对BDFs 算法较好。它是一种多步算法,适用于刚性系统,当用户估计要解决的问题是比较困难的,或者不能使用ode45,或者即使使用效果也不好,就可以用ode15s 。由于它是一种多步解法器,所以运算时间相对长一点,
这种运算方法的精度中等。仿真结果值基本上与上述仿真算法的结果相同,且更加稳定。
ode23s 是一种改进的二阶Rosenbrock 算法。在容许误差较大时,ode23s 比ode15s 有效,所以在解算一类带刚性的问题时用ode15s 处理不行的话,可以用ode23s 算法。且运算时间变小,速度加快。
ode23t 是一种采用自由内插方法的梯形算法。如果模型有一定刚性,又要求解没有数值衰减时,可以使用这种算法。
ode23tb 采用TR-BD F2算法,即在龙格.库塔法的第一阶段用梯形法,第二阶段用二阶的Backward Differentiation Formulas 算法。从结构上讲,两个阶段的估计都使用同一矩阵。在容差比较大时, ode23tb 和ode23t 都比ode15s 要好。
2、闭环仿真:
(一)实验要求:
① 在上述仿真基础上,添加转速闭环控制器,转速指令为1130rpm ,
0~2.5s ,电机空载,即I d =0;
2.5s~5s ,电机满载,即I d =55A 。
② 控制器为比例环节:试取不同k p 值,画出转速波形,求稳态时n 和s 并进行比较。
③ 控制器为比例积分环节,设计恰当的k p 和k I 值,并与其它不同的k p 和k I 值比较,画出
不同控制参数下的转速波形,比较静差率、超调量、响应时间和抗扰性。 1/1+s T R l s T R m e C 1d
I +--+n
*n +
-控制器
图2 转速闭环直流电机调速控制框图
(二)实验内容:
① 在开环仿真基础上进行修改,此时输入量为一个转速的常量,再加入一个控制环节和一个反馈环节,实现对速度的控制。选择不同的Kp 值,通过仿真结果来选择最佳效果。
② 将原来的比例环节设置为比例积分环节,设计恰当的k p 和k I 值,并与其它不同的k p 和k I 值比较,画出不同控制参数下的转速波形,比较静差率、超调量、响应时间和抗干扰性。
③ 对系统进行仿真。
(三)仿真结果:
控制器为比例环节
搭建simulink 仿真模型如下图所示:
Kp=20
由于Kp=1000,Kp=100,Kp=50时的仿真波形波动比较大,完全不满足要求,因此在这里不进行分析截图。当Kp=20时,效果比50时好的多,在稳定之后,波动不是太大。但是在未稳定之前,超调和调节时间等都比较大,无法达到要求。需要减小Kp的值。此时输出的转数比较接近我们希望的转速。
Kp=5
Kp=2.5
当Kp=2.5时,空载转速为1080n/min。离我们所希望的转速不是太远,负载转速为1060n/min。所以转差率s=0.0185,转差率比较小。
Kp=1.5
当Kp=1.5时,空载转速为1000n/min。离我们所希望的转速差距较大,负载转速为983n/min。所以转差率s=0.017,转差率比较小。
Kp=0.5
当Kp=0.5时,效果比前面的都好,并且稳定时间也比较短,经过一次振荡之后就基本上稳定了。空载转速为816n/min。这比我们输入的转速1130n/min小得多。满载转速为772n/min。所以转差率s=0.05.转差率比Kp=2时还大,并且比我们所希望转速也比较远,因此不选择Kp=0.5,虽
然其超调等比较好。
Kp=0.05
明显与我们所期望的波形即满载转速和空载转速的比较有很大差别,无法进行静差率等仿真计算,因此Kp=0.05淘汰。
分析与结论:
比例环节是按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。比例作用大,可以加快调节,减少误差,但是过大的比例,使系统的稳定性下降,甚至造成系统的不稳定。
根据上面的各种Kp的仿真结果我们可以看出来当Kp越小时,超调和调节时间等越小。但是离我们跟定的输入值就越大,此时就需要并且当Kp越小时,其转差率也会随之增大,我们一般都是希望转差率尽量小一定,这样电机运转的效率高一点,所以根据综合各方面的因数,我们选择当Kp=2.5。虽然此时的离我们所希望的输出还有一定的差值,但是相对比较好。因此我们可以看出来只是用比例环节进行调节,依然还是不能达到我们所希望的要求。因此下面用比例积分环节进行调节。
控制器为比例积分环节
搭建simulink仿真模型如下图所示:
Kp=0.1,Ki=1
由仿真结果可知,空载转速为1124r/min,负载转速为1125r/min,转差率为-8.90*10^-4,在加入负载之后,对转速却基本上没有影响。没有超调,相同的Kp值,Ki值越大,则其超调量越小,调节时间增大到1.2s。这是我们所不希望的。抗干扰性比较好。
Kp=0.1,Ki=10
由仿真结果可知,空载转速为1135r/min,离我们所希望的输出值比较相近。峰值转速为
1480r/min,负载转速为1133r/min,因此转差率s=0.00176,转差率比较小。峰值时间为0.192s,调节时间为0.45s左右。超调量为30.6%,超调量相对较大。
Kp=1,Ki=1
由仿真结果可知,空载转速为1100n/min。峰值转速为1123n/min,峰值时间为0.042s,调节时间为2.5s左右,这比Kp=0.1,Ki=1的调节时间要长。基本无超调。
Kp=1,Ki=10
由仿真结果可知,空载转速为1135r/min,这与Ki相同为Kp=0.1的控制环节相同。峰值转速为1235r/min,负载转速为1130r/min,峰值时间为0.03s,调节时间为0.36s左右,这比Kp=0.1,Ki=10的调节时间要短。超调量为9.29%。同样比相同的Ki值,而Kp值不同的超调量小。加入负载的调节时间也比原来小。因此在相同条件下,我们应该选择Kp=1,Ki=10的控制环节。
Kp=50,Ki=0.1
如此图所示,虽然调节时间较小,但Kp过大会使波形振荡幅度和频率增大,波形无法识别空载与负载之间的关系,无超调量。
分析与结论:
积分调节作用是使系统消除稳态误差,提高无差度。因为有误差,积分调节就进行,直至无差时积分调节停止,积分调节输出常值。积分作用的强弱取决与积分时间常数Ti,Ti越小,积分作用就越强。反之Ti大则积分作用弱,加入积分调节可使系统稳定性下降,动态响应变慢。积分作用常与另两种调节规律结合,组成PI调节器或PID调节器。
通过以上仿真和分析我们可以知道,当Ki相同,Kp越大时,超调量越大,输出结果越接近于我们所希望的结果值,即被放大的倍数就越大。当Kp相同时,超调量越小,且有的可能没有超调。峰值转速也会相对小一点。
也就是说,当比例系数增大时,加快了系统响应,在有静差的情况下有利于减小静差,但比例系数过大将会使系统有过大的超调,并减小稳定性;而当增大积分时间,却有利于减小超调,减小震荡,增大系统稳定性,但是系统静差消除时间将增大。此时我们就需要根据具体的要求来选择相应参数来控制输出。
3.分析
结合《自动控制系统》相关知识,对上述结果进行分析。
一、结果分析
电压负反馈只能维持电动机端电压恒定,而对电动机的电枢电阻压降引起的静态速降不能予以抑制。即电压负反馈调速系统的静态速降比相同放大系数的转速负反馈系统要大一些,稳态性能要差一些。并且电压负反馈不能对电动机及其之后的负载的变化起调节作用。但由于其结构简单,在一些对性能要求不高的场合,经常使用电压负反馈。
在闭环仿真中,相当于我们给定了一个参考量,通过闭环控制来实现输出与输入一致。而在控制中,通常有比例控制环节、比例积分控制环节、比例微分控制环节和比例微分积分控制环节。不同的控制环节有不同的作用。比例环节的特点是输出不失真,不延迟,成比例地复现输入信号的变化。在仿真过程中,通过不同的Kp可以看出来,其放大的效果是不一样的,总体上对输入信号有放大,但是由于在输入和反馈之间有个波动,把这个波动放大,这样使得在开始时,系统波动比较大,且调节时间也比较大。P控制器实质上是一个具有可调增益的放大器。在信号变换过程中,P控制器只改变信号的增益而不影响其相位。在串联校正中,加大控制器增益Kp,可以提高系统的开环增益,减小系统稳态误差,从而提高系统的控制精度,但会降低系统的相对稳定性,甚至可能造成闭环系统不稳定。因此,在系统校正设计中很少单独使用比例控制规律。由仿真我们也可以看出来,当Kp为1000时,系统不稳定,而逐渐减小Kp值时,系统逐渐变得稳定,不过随着Kp的减小,增益也随之减小。始终不能达到我们所希望的情况。
控制器为比例积分控制,积分环节可以提高系统的型别,有利于系统稳态性能的提高,积分调节器主要功能(1)延缓作用;(2)积累作用;(3)记忆作用;(4)动态放大系数自动变化的作用。只要稳态误差不为零,控制器就一定会产生一个继续增长的输出转矩来抵消阶跃扰动转矩的作用,力图减小这个误差,直到稳态误差为零,系统取得平衡而进入稳态。在动态过程中,当ΔUn变化时,只要其极性不变,积分调节器的输出Uc便一直增长;只有达到*Un =Un ,ΔUn =0时,Uc才停止上升;不到ΔUn变负,Uc不会下降。ΔUn=0时, Uc并不是零,而是一个终值;如果ΔUn不再变化,这个终值便保持恒定而不再变化,这是积分控制的特点。因此,积分控制可以使系统在无静差的情况下保持恒速运行,实现无静差调速。
但积分控制使系统增加了一个位于原点的开环极点,使信号产生90°的相角滞后,于系统的稳定性不利。而加上比例环节的性质之后,就能改变整个控制的性质,能够达到我们所希望要求。在串联校正时,PI控制器相当于在系统中增加了一个位于原点的开环极点,同时也增加了一个位于s左平面的开环零点。位于原点的极点可以提高系统的型别,以消除或减小系统的稳态误差,改善系统的稳态性能;而增加的负实零点则用来减小系统的阻尼程度,缓和PI控制器极点对系统稳定性及动态过程产生的不利影响,只要积分时间足够大,PI控制器对系统稳定
性的不利影响可大为减弱。在控制工程中,PI控制器主要用来改善控制系统是的稳态性能。通过以上的仿真结果我们可以看出来,在Kp和Ki保持一定的比例时,系统的性能都相对较好一点,并且系统的Ki越大,就相当于积分的时间越长一点,则系统的稳定性能越好。且其抗干扰能力也比较强,但是当Kp比Ki大时,可能会导致系统不稳定,且调节时间也会相应的增加,因此我们应该通过适当改变Kp和Ki的值来调节系统的性能。在只有比例环节时,为了达到输入量,我们不得不增大Kp的值,增大Kp的值,带来的后果是使系统变得不稳定,这样对于我们调节是不利的,而在加入积分环节之后,通过同时调节Kp和Ki的值可以达到一个很好的控制效果。说明积分环节能够使系统达到一个稳定的效果,由于积分环节积分时间的影响,在加入负载(在自控中相当于一个干扰信号)之后,其输出虽然在加入瞬间有个干扰,但是很快输出基本上能够稳定跟上原来的输出,这样就增加了其抗干扰能力。而在比例环节中,其抗干扰能力不强,且还会把干扰信号进行放大,这就很可能使系统变得不再稳定。因此PI控制是比较常用的。
二、试验心得
通过本实验对simulink仿真系统下很多模型有了进一步的了解。通过对simulink的不同算法的仿真,理解了不同算法之间的关系及运算时间和精度的概念。
同时通过对控制系统的仿真,进一步理解了上学期所学习的关于自控方面的知识。本试验中用到了两个控制器来进行控制,不同的控制环节,对系统的输出结果有不同的影响。通过本次的试验仿真,我对开闭环系统及比例环节、比例积分控制环节有了很深的理解。
一、为什么要进行仿真 ?什么叫系统? ◆系统:相互关联又相互作用着的对象的有机组合,该有机组合能够完成某项任务或实现某个预定的目标。 通常研究的系统有工程系统和非工程系统。 ◆工程系统(电气、机电、化工) ◆非工程系统(经济、交通、管理) 建立系统概念的目的在于深入认识并掌握系统的运动规律,以便分析和综合自然、社会和工程系统中的种种复杂问题。 ?对系统进行研究、分析与设计的方法; (1)直接在系统上进行实验 在要设计的系统上进行实验 (2)在模型上进行实验 对要设计的系统进行处理,根据其中内含的各种自然规律(包括欧姆定律、比例环节和惯性环节等)得到相关的控制规律,即系统的数学模型来进行研究。 对要设计的系统进行一定比例的缩放得到缩小或放大的物理模型。(古时的建筑)选择在模型上进行实验的原因 ◆系统尚未设计出来 ◆某些实验会对系统造成伤害 ◆难以保证实验条件的一致性;如果存在人的因素,则更难保证条件的一致性。 ◆费用高 ◆无法复原 二、仿真的定义 ?仿真的定义在不同的领域或范畴中有不同的描述,可以概括为:“仿真是指用模型(物理模型或数学模型)代替实际系统进行实验和研究。” ?仿真遵循的原则:原理抽象 相似原理。 相似原理:几何相似、性能相似、环境相似。 几何相似:根据相似原理把原来的实际系统放大可缩小。如把12000吨水压机可用1200吨或120吨水压机作其模型。万吨轮船也要用缩小的模型来研究。 性能相似:构成模型的元素和原系统的不同,但其性能相似。如:可用一个电气系统来模拟热传导系统。在这个电气系统中电容代表热容量,电阻代表热阻,电压代表温差,电流代表热流。 三、仿真的目的或作用 ?优化设计 ◆预测系统的性能和参数 ?经济性 ◆采用物理模型或实物实验,花费巨大。 ◆采用数学模型即计算机数学仿真可大幅度的降低成本并可重复使用。 ?安全性 ◆载人飞行器和核电站的危险性不允许。 ?预测性 ◆对于非工程系统,直接实验不可能,只能采用预测的方法。(天气预报) ?复原性
选择题 1(6分)、 在Word得编辑状态中,如果要输入希腊字母Ω,则需要使用_________菜单. A、开始 B、插入 C、设计 D、视图 参考答案:B 2(6分)、 在Word得编辑状态打开了一个文档,对文档作了修改,进行关闭文档操作后_________. A、文档被关闭,并自动保存修改后得内容 B、文档不能关闭,并提示出错 C、文档被关闭,修改后得内容不能保存 D、弹出对话框,并询问就是否保存对文档得修改 参考答案:D 3(6分)、 word在编辑一个文档完毕后,要想知道它打印后得结果,可使用()功能。 A、打印预览 B、模拟打印 C、提前打印 D、屏幕打印 参考答案:A 4(6分)、
在Word 2013中打开某个文件后,若希望将当前文件中所有得“语文”二字改为“数学"二字,最好得操作方法就是( )。 A、利用“查找与替换”功能完成修改操作 B、利用“查找与选择”功能完成修改操作 C、利用“自动更正”功能完成修操作 D、利用“复制”功能完成修改操作 参考答案:A 5(6分)、 使图片按比例缩放应选用() A、拖动中间得句柄 B、拖动四角得句柄 C、拖动图片边框线 D、拖动边框线得句柄 参考答案:B 6(6分)、 下列文件中,()就是Word类型得文档。 A、Text、txt B、Text、docx C、Text、x D、Text、xlsx 参考答案:B 7(6分)、 在Word得编辑状态,打开文档"ABC”,修改后另存为"ABD”,则文档ABC_________. A、被文档ABD覆盖 B、被修改未关闭
C、被修改并关闭 D、未修改被关闭 参考答案: D 8(6分)、 在Word中,下述关于分栏操作得说法,正确得就是( ). A、栏与栏之间不可以设置分隔线 B、任何视图下均可瞧到分栏效果 C、设置得各栏宽度与间距与页面宽度无关 D、可以将指定得段落分成指定宽度得两栏 参考答案:D 9(6分)、 在Word2013中当前输入得文字被显示在()。 A、文档得尾部 B、鼠标指针得位置 C、插入点位置 D、当前行得行尾 参考答案: C 10(6分)、 在word中,如果要在文档中层叠图形对象,应执行()操作A、“绘图”工具栏中得“叠放次序”命令 B、“绘图"工具栏中得“绘图”菜单中“叠放次序"命令 C、“图片”工具栏中得“叠放次序”命令 D、“格式”工具栏中得“叠放次序”命令 参考答案:B 11(6分)、
通信对抗原理仿真大作业题目 基本要求:仿真大作业分组完成,每个组3~5人,至少选择4个题目,并且在每一类中至少选择一个题目。利用MATLAB完成计算机仿真,并且撰写仿真实验报告。大作业完成情况将作为评价平时成绩的依据。 第一类:测频方法仿真 1.FFT法数字测频技术仿真。仿真模拟通信信号或者数字通信信号三种以上, 基于FFT法进行载波频率测量。画出信号的时域、频域波形,给出FFT法测量的结果。进一步在0-20dB信噪比条件给出不同信噪比下的测量曲线,分析信噪比与测量误差的关系。 2.互相关法数字测频技术仿真。仿真模拟通信信号或者数字通信信号三种以上, 基于互相关法进行载波频率测量。画出信号的时域、频域波形,给出测量结果。进一步在0-20dB信噪比条件给出不同信噪比下的测量曲线,分析信噪比与测量误差的关系。 3.相位差分法数字测频技术仿真。仿真模拟通信信号或者数字通信信号三种以 上,基于相位差分法法进行载波频率测量。画出信号的时域、频域波形,给出测量结果。进一步在0-20dB信噪比条件给出不同信噪比下的测量曲线,分析信噪比与测量误差的关系。 第二类:测向方法仿真 4.相位干涉仪测向方法仿真。仿真模拟通信信号或者数字通信信号两种以上, 基于相位干涉仪测向方法,对不同方向到达的通信信号进行测向。画出信号的时域、频域波形,给出到达方向测量结果。进一步在0-20dB信噪比条件给出不同信噪比下的测量曲线,分析信噪比、到达角与测量误差的关系。 5.到达时差测向方法仿真。仿真模拟通信信号或者数字通信信号两种以上,基 于到达时差测向方法,对不同方向到达的通信信号进行测向。画出信号的时域、频域波形,观察相关函数,给出测量结果。进一步在0-20dB信噪比条件给出不同信噪比下的测量曲线,分析信噪比、到达角与测量误差的关系。6.多普勒测向方法仿真。仿真模拟通信信号或者数字通信信号两种以上,基于 多普勒测向方法,对不同方向到达的通信信号进行测向。画出信号的时域、频域波形,给出测量结果。进一步在0-20dB信噪比条件给出不同信噪比下的测量曲线,分析信噪比、到达角与测量误差的关系。 7.沃森-瓦特测向方法仿真。仿真模拟通信信号或者数字通信信号两种以上,基 于沃森-瓦特测向方法,对不同方向到达的通信信号进行测向。画出信号的时域、频域波形,给出测量结果。进一步在0-20dB信噪比条件给出不同信噪比下的测量曲线,分析信噪比、到达角与测量误差的关系。 第三类:信号处理技术仿真 8.信号带宽和幅度测量方法仿真。仿真模拟通信信号或者数字通信信号三种以 上,基于FFT法进行信号带宽、信号相对幅度测量。画出信号的时域、频域
C#程序设计期末大作业考核要求及选题 专业:班级:任课教师: 考核目的及方式:“C#程序设计”作为专业技术课程,其目的是学习基于.NET平台的C#程序开发技术,训练提高本专业学生软件开发能力。本课程采用课程大作业方式完成期末考核,所要求完成的大作业项目列表见附录。 考核任务及要求:学生完成本课程大作业要求如下: 1)每个学生选择一个项目,独立设计与实现; 2)现场运行演示所实现的项目并解答提问(50%); 3)课程结束1周内独立提交系统开发文档(电子档+打印档)和可运行系统(50%)。 期末考核综合评定成绩根据学生选择项目难度系数3/4/5,其满分分别为80/90/100。 大作业开发文档组成:系统需求定义+系统总体设计(数据对象/数据库设计+系统模块设计+用户界面设计)+系统关键实现算法或代码+系统测试报告+系统设计参考资料索引。 系统开发文档电子档+可运行系统打包提交,打包文档名称:C#<学号>.rar 系统开发打印文档按A4幅面,封面按文理学院课程大作业统一封面制作,装订提交。
附录:C#课程设计大作业选题表 项目1 简易文本编辑器设计与实现【难度系数3】 参照Windows的记事本功能,应用C#的MDI程序开发技术,设计实现一个能够编辑多文本文件的简易文本编辑器。 项目2 图片浏览器设计与实现【难度系数4】 使用.NET的GDI+图形绘制功能,用C#设计实现一个图片浏览器; 项目3 简易Windows文件管理器设计与实现【难度系数4】 参照Windows的资源管理器功能,应用C#的MDI程序开发技术,设计实现一个能够查找、复制、剪切、删除文件和文件夹的简易Windows文件管理器。 项目4 用户文件加密存储系统设计与实现【难度系数5】 使用Win窗体/https://www.doczj.com/doc/253051976.html,技术实现一个用户文件加密存储系统。该系统的基本功能包括:1)实现用户名和密码系统登陆; 2)对于已合法登陆的用户,其自身创建或者编辑修改的文本文件加密存储到指定文件夹;3)对于已合法登陆的用户,如果要求访问已加密文本文件,必须输入该文件的合法密钥才能正确解密访问(显示/编辑)。 项目5 基于数据库系统的简易图书管理系统设计与实现【难度系数4】 使用Access(或者Excel)建立两个表,定义一个关系: 图书表(图书分类号、馆藏编号(关键字)、书名、价格、作者名、借出否); 读者表(读者编号(关键字)、读者名称、过期未还); 借书关系:每个读者最多可借书K本,每本书最长借出M天,如果存在过期未还书籍,则不允许再借出图书 假设当前共有n1本图书,n2名读者(相关字段类型及数据自定义编,n1>=30,n2>=5)。用C#实现一个简易图书管理系统(Win窗体/https://www.doczj.com/doc/253051976.html,应用),该系统包括以下功能: *分别按照馆藏编号、图书分类号作者名顺序列出所有图书馆藏信息; *分别按照馆藏编号、图书分类号顺序列出所有在馆图书; *分别按照馆藏编号、图书分类号顺序列出所有在借图书; *分别按照馆藏编号、书名、作者名查询指定图书馆藏信息; *分别按读者编号、读者名顺序列出所有读者; *分别按读者编号、读者名查询该读者当前借阅所有书籍并对每本标注是否过期; *实现读者借书功能(如果没有过期未还书籍则一次可借多本,但不能超过其借书上限);*实现读者还书功能; *扩展定义的其他功能 项目6基于文件存储的简易图书管理系统设计与实现【难度系数5】 将项目5的表和关系用文件方式存储(不依赖数据库系统)实现相关功能 项目7简易学生选课管理系统设计与实现【难度系数5】 使用Access(或者Excel)建立两个表,定义一个关系: 学生信息表(学号(关键字)、姓名、性别、年龄、班级,专业),
学院 专业 届别 课程 班级 姓名 学号 联系方式 指导老师2012年5月
计算机仿真技术的发展概述及认识 摘要:随着经济的发展和社会的进步,计算机技术高速发展,使人类社会进入了信息时代,计算机作为后期新秀渗入到人们生活中的每一个领域,给人们的生活带来了前所未有的变化。作为新兴的技术,计算机技术在人类研究的各个领域起到了只管至关重要的作用,帮助人类解决了许多技术难题。在科研领域,计算机技术与仿真技术相结合,形成了计算机仿真技术,作为人们科学研究的一种新型方法,被人们应用到各个领域,用来解决人们用纯数学方法或者现实实验无法解决的问题,对科研领域技术成果的形成有着积极地促进作用。 本文在计算机仿真技术的理论思想基础上,分析了计算机仿真技术产生的基本原因,也就是人们用计算机模拟解决问题的优点所在,讨论了模拟、仿真、实验、计算机仿真之间的联系和区别,介绍了计算机仿真技术的发展历程,并查阅相关资料介绍了计算机仿真技术在不同领域的应用,分析并预测了计算机仿真的未来发展趋势。经过查阅大量数据资料并加以分析对比,这对于初步认识计算机仿真技术具有重要意义。 关键词:计算机仿真;模拟;仿真技术;发展 Discussionand understanding of the development of computer simulation technology Abstract:In the field of scientific research, computer technology and simulation technology is the combination of computer simulation technology as a new method of scientific research applied to various fields, used to solve the problems of pure mathematical methods or practical experiments can not be solved, has a positive role in promoting the formation of scientific research and technological achievements. In the theory of computer simulation technology based on the idea of computer simulation technology to produce the basic reason people use computer simulation to solve the problem of the advantages of where to discuss the links and
课程:虚拟现实题目:沸腾的水壶 班级:数媒0902 学号:0305090206 姓名:沈玉婷 日期:2012.12
1、绪论 1.1 虚拟现实动画简介 虚拟现实动画就是用虚拟现实的技术以动画的形式表现出来(这是建立在虚拟现实及动画技术的基础上出现的)。我们以了解什么是虚拟现实及动画的意思后就能全面理解虚拟现实动画的概念。 1.2 关于虚拟现实技术 虚拟现实(Virtual Reality,简称VR;又译作灵境、幻真)是近年来出现的高新技术,也称灵境技术或人工环境。虚拟现实是利用电脑模拟产生一个三维空间的虚拟世界,提供使用者关于视觉、听觉、触觉等感官的模拟,让使用者如同身历其境一般,可以及时、没有限制地观察三度空间内的事物。 VR是一项综合集成技术,涉及计算机图形学、人机交互技术、传感技术、人工智能等领域,它用计算机生成逼真的三维视、听、嗅觉等感觉,使人作为参与者通过适当装置,自然地对虚拟世界进行体验和交互作用。使用者进行位置移动时,电脑可以立即进行复杂的运算,将精确的3D世界影像传回产生临场感。该技术集成了计算机图形(CG)技术、计算机仿真技术、人工智能、传感技术、显示技术、网络并行处理等技术的最新发展成果,是一种由计算机技术辅助生成的高技术模拟系统。概括地说,虚拟现实是人们通过计算机对复杂数据进行可视化操作与交互的一种全新方式,与传统的人机界面以及流行的视窗操作相比,虚拟现实在技术思想上有了质的飞跃。 2、需求分析 随着CAD技术的发展,人们就开始研究立体声与三维立体显示相结合的计算机系统。目的在于建立一种新的用户界面,使用户可以置身于计算机所表示的三维空间资料库环境中,并可以通过眼、手、耳或特殊的空间三维装置在这个环境中"环游",创造出一种"亲临其境"的感觉。 虚拟现实是人们通过计算机对复杂数据进行可视化、操作以及实时交互的环境。与传统的计算机人――机界面(如键盘、鼠标器、图形用户界面以及流行的Windows等)相比,虚拟现实无论在技术上还是思想上都有质的飞跃。传统的人――机界面将用户和计算机视为两个独立的实体,而将界面视为信息交换的媒介,由用户把要求或指令输入计算机,计算机对信息或受控对象作出动作反馈。虚拟现实则将用户和计算机视为一个整体,通过各种直观的工具将信息进行可视化,形成一个逼真的环境,用户直接置身于这种三维信息空间中自由地使用各种信息,并由此控制计算机。目前,虚拟现实技术已经遍布我们生活中的每一个行业,城市规划中的应用、旅游景观的应用、医学中应用、娱艺教中的应用、军事与航天中的应用、室内设计中的应用、房产开发中的应用、工业仿真中的应用、应急推演中的应用。由此可知,虚拟
计算机仿真技术的发展概述及认识 摘要:随着经济的发展和社会的进步,计算机技术高速发展,使人类社会进入了信息时代,计算机作为后期新秀渗入到人们生活中的每一个领域,给人们的生活带来了前所未有的变化。作为新兴的技术,计算机技术在人类研究的各个领域起到了只管至关重要的作用,帮助人类解决了许多技术难题。在科研领域,计算机技术与仿真技术相结合,形成了计算机仿真技术,作为人们科学研究的一种新型方法,被人们应用到各个领域,用来解决人们用纯数学方法或者现实实验无法解决的问题,对科研领域技术成果的形成有着积极地促进作用。 本文在计算机仿真技术的理论思想基础上,分析了计算机仿真技术产生的基本原因,也就是人们用计算机模拟解决问题的优点所在,讨论了模拟、仿真、实验、计算机仿真之间的联系和区别,介绍了计算机仿真技术的发展历程,并查阅相关资料介绍了计算机仿真技术在不同领域的应用,分析并预测了计算机仿真的未来发展趋势。经过查阅大量数据资料并加以分析对比,这对于初步认识计算机仿真技术具有重要意义。 关键词:计算机仿真;模拟;仿真技术;发展 一、引言 计算机仿真技术是以多种学科和理论为基础,以计算机及其相应的软件为工具,通过虚拟试验的方法来分析和解决问题的一门综合性技术。计算机仿真(模拟)早期称为蒙特卡罗方法,是一门利用随机数实验求解随机问题的方法。其原理可追溯到1773年法国自然学家G.L.L.Buffon为估计圆周率值所进行的物理实验。根据仿真过程中所采用计算机类型的不同,计算机仿真大致经历了模拟机仿真、模拟-数字混合机仿真和数字机仿真三个大的阶段。20世纪50年代计算机仿真主要采用模拟机;60年代后串行处理数字机逐渐应用到仿真之中,但难以满足航天、化工等大规模复杂系统对仿真时限的要求;到了70年代模拟-数字混合机曾一度应用于飞行仿真、卫星仿真和核反应堆仿真等众多高技术研究领域;80年代后由于并行处理技术的发展,数字机才最终成为计算机仿真的主流。现在,计算机仿真技术已经在机械制造、航空航天、交通运输、船舶工程、经济管理、工程建设、军事模拟以及医疗卫生等领域得到了广泛的应用。 二、基本概念 模拟:(Simulation)应用模型和计算机开展地理过程数值和非数值分析。不是去求系统方程的解析解,而是从系统某初始状态出发,去计算短暂时间之后接着发生的状态,再以此为初始状态不断的重复,就能展示系统的行为模式。模拟是对真实事物或者过程的虚拟。模拟要表现出选定的物理系统或抽象系统的关键特性。模拟的关键问题包括有效信息的获取、关键特性和表现的选定、近似简化和假设的应用,以及模拟的重现度和有效性。可以认为仿真是一种重现系统外在表现的特殊的模拟。 仿真:(Emulation)利用模型复现实际系统中发生的本质过程,并通过对系统模型的实验来研究存在的或设计中的系统,又称模拟。即使用项目模型将特定于某一具体层次的不确定性转化为它们对目标的影响,该影响是在项目仿真项目
第三次在线作业 单选题 (共30道题) 展开 收起 1.( 2.5分) PowerPoint演示文稿的作者必须非常注意幻灯片集的两个要素是()。 ? A、内容和设计 ? B、内容和模板 ? C、内容和视觉效果 ? D、问题和解决方法 我的答案:A 此题得分:2.5分 2.(2.5分) PowerPoint中的视图,其中不包括()。 ? A、普通视图 ? B、幻灯片浏览视图 ? C、幻灯片视图 ? D、页面视图 我的答案:D 此题得分:2.5分 3.(2.5分)有关幻灯片配色方案下列说法不正确的是()。 ? A、配色方案是指可以应用到所有幻灯片备注页或听众讲义上的8种均衡颜色
? B、配色方案是由背景颜色、线条和文本颜色及其它6种颜色组成 ? C、对演示文稿应用一种配色方案后,其颜色对演示文稿中所有对象都是有效的 ? D、所有配色方案均是8种固定颜色的组合 我的答案:B 此题得分:2.5分 4.(2.5分)关于幻灯片页面版式的叙述中不正确的是()。 ? A、幻灯片的大小可以改变 ? B、同一演示文稿不同幻灯片的配色方案可以不同 ? C、同一演示文稿中允许使用多种母板格式 ? D、幻灯片设计模板一旦改变,就不可以改变 我的答案:D 此题得分:2.5分 5.(2.5分) PowerPoint中,在对象的" 动作设置" 中,不能进行()。 ? A、超级链接设置 ? B、运行宏设置 ? C、幻灯片切换设置 ? D、运行程序设置 我的答案:C 此题得分:2.5分 6.(2.5分)要从一张幻灯片“溶解”到下一张幻灯片,应使用“幻灯片放映”中的()。
? A、动作设置 ? B、幻灯片切换 ? C、预设动画 ? D、自定义动画 我的答案:B 此题得分:2.5分 7.(2.5分)设置所有幻灯片放映时的换页效果为“垂直百叶窗”,应该使用“幻灯片放映”菜单下的()选项。 ? A、动作按钮 ? B、幻灯片切换 ? C、预设动画 ? D、自定义动画 我的答案:B 此题得分:2.5分 8.(2.5分) PowerPoint中按照预设时间自动连续播放幻灯片,应设置()。 ? A、自定义放映 ? B、动作设置 ? C、观看方式 ? D、排练计时 我的答案:D 此题得分:2.5分
《控制系统数字仿真》课程 大作业 姓名: 学号: 班级: 日期: 同组人员:
目录 一、引言 (2) 二、设计方法 (2) 1、系统数学模型 (2) 2、系统性能指标 (4) 2.1 绘制系统阶跃响应曲线、根轨迹图、频率特性 (4) 2.2 稳定性分析 (6) 2.3 性能指标分析 (6) 3、控制器设计 (6) 三、深入探讨 (9) 1、比例-微分控制器(PD) (9) 2、比例-积分控制(PI) (12) 3、比例-微分-积分控制器(PID) (14) 四、设计总结 (17) 五、心得体会 (18) 六、参考文献 (18)
一、引言 MATLAB语言是当今国际控制界最为流行的控制系统计算机辅助设计语言,它的出现为控制系统的计算机辅助分析和设计带来了全新的手段。其中图形交互式的模型输入计算机仿真环境SIMULINK,为MATLAB应用的进一步推广起到了积极的推动作用。现在,MATLAB语言已经风靡全世界,成为控制系统CAD领域最普及、也是最受欢迎的软件环境。 随着计算机技术的发展和应用,自动控制理论和技术在宇航、机器人控制、导弹制导及核动力等高新技术领域中的应用也愈来愈深入广泛。不仅如此,自动控制技术的应用范围现在已发展到生物、医学、环境、经济管理和其它许多社会领域中,成为现代社会生活中不可或缺的一部分。随着时代进步和人们生活水平的提高,在人类探知未来,认识和改造自然,建设高度文明和发达社会的活动中,控制理论和技术必将进一步发挥更加重要的作用。作为一个自动化专业的学生,了解和掌握自动控制的有关知识是十分必要的。 利用MATLAB软件及其SIMULINK仿真工具来实现对自动控制系统建模、分析与设计、仿真,能够直观、快速地分析系统的动态性能和稳态性能,并且能够灵活的改变系统的结构和参数,通过快速、直观的仿真达到系统的优化设计,以满足特定的设计指标。 二、设计方法 1、系统数学模型 美国卡耐尔基-梅隆大学机器人研究所开发研制了一套用于星际探索的系统,其目标机器人是一个六足步行机器人,如图(a)所示。该机器人单足控制系统结构图如图(b)所示。 要求: (1)建立系统数学模型; (2)绘制系统阶跃响应曲线、根轨迹图、频率特性; (3)分析系统的稳定性,及性能指标; (4)设计控制器Gc(s),使系统指标满足:ts<10s,ess=0,,超调量小于5%。
远程与继续教育学院《建筑制冷技术》大作业 题目:建筑制冷技术
大工20秋《建筑制冷技术》大作业及要求 第一部分: 注意:从以下几个题目中任选其一作答。 题目一:简述制冷技术在生活和生产活动中的应用。 答:制冷技术的应用随着制冷技术的不断发展广泛应用到人们生活和生产活动的各个领域,制冷技术与食品安全关系密切。以制冷技术与食品冷冻技术为核心的冷藏链已成为现代生活中不可缺少的一个产业链。制冷食品保鲜工程,易腐食品从采购、加工、贮藏、运输到销售的各个流通过程中,都必须保持稳定的低温环境,才能延长和提高食品的质量和经济价值。这就需有各种制冷设备。如冷加工设备、冷冻库、速冻库、冷藏库、保鲜冷库、冷藏运输车或船、冷藏售货柜台等。制冷技术在空调工程中也得到应用广泛应用。光学仪器仪表、精密计量量具、纺织等生产车间及计算机房等,都要求相对的环境温度、湿度、洁净度进行不同程度的控制。体育馆、大会堂、宾馆等公共建筑和小汽车、飞机、大型客车等交通工具也都需有舒适的空调系统。现代的制冷技术,是18世纪后期发展起来的。在此之前人们很早已懂得制冷的利用。我国古代就有人用天然冰冷藏食品和防暑降温。马可·波罗在他的著作《马可·波罗游记》中对中国制冷和造冰窖的方法有详细的记述。在普冷方面1834年发明家波尔金斯造出了第一台以为工质的蒸气压缩式制冷机并正式申请了英国第6662号专利。这是后来所有蒸气压缩式制冷机在此期间,空气绝热膨胀会显著降低空气温度的现象开始用于制冷。1844年,医生高里用封闭循环的空气制冷机为患者建立了一座空调站,空气制冷机使他一举成名。威廉·西门斯在空气制冷机中引入了回热器,提高了制冷机的性能。1859年,卡列发明了氨水吸收式制冷系统,申请了原理专利。1910年左右,马利斯·莱兰克发明了蒸气喷射式制冷系统。到20世纪,制冷技术有了更大发展。
计算机仿真技术作业一 研究题目:转速反馈单闭环直流调速系统仿真 1、开环仿真: (一)实验要求: 直流电机模型框图如下图所示,仿真参数为R =0.6,T l =0.00833,T m =0.045,Ce=0.1925。本次仿真采用算法为ode45,仿真时间5s 。 1/1+s T R l s T R m e C 10d u d I + --+n 图1 直流电机模型 ① 用simulink 实现上述直流电机模型,直流电压U d0取220V , 0~2.5s ,电机空载,即I d =0; 2.5s~5s ,电机满载,即I d =55A 。 ② 画出转速n 的波形,根据仿真结果求出空载和负载时的转速n 以及静差率s 。改变仿真算法,观察效果(运算时间、精度等)。 (二)实验内容: ① 按照上图把电机模型建立好,其中U d0设置为常数,并把其幅值设置为220,把其它相 应的环节也设置好。把I d 设置为“阶跃信号”,且在0~2.5s 之间其幅值为0,而2.5~5s 之间其 幅值为55,在对系统中其它参数进行设置。为了观察输出波形,在输出处接上一个示波器。 ② 对仿真模式进行设置,系统默认的仿真算法为ode45,只需要把仿真时间设置为5s 即可。 ③ 对系统进行仿真。 (三)仿真结果:
上图即为电机转速的仿真结果图,上图分为两个阶段,第一个阶段(0~2.5s )为空载转速, 第二阶段(2.5~5s )为满载转速。空载转速为1147r/min 。在2.5s 时加入了负载,通过仿真结果我们可以看出来,负载转速为976r/min 。可以看出在加入负载之后,电机的转速开始下降。 静差率(转速变化率)是指电动机在一定转速下运行时,负载由理想空载变到满载时所产生的转速降落与理想空载转速之比值。静态率越小,稳定性越高。只有设法减小静态速降Δn 才能扩大调速范围,减小静差率,提高转速的稳定度。 根据电机转差率的公式149.01147976114700=-=-=n n n s 。转差率还是比较小的,说明该电机效 率比较高。 关于仿真算法的区别: ode45是基于显式Rung-Kutla (4,5) 和Dormand- Prince 组合的算法,它是一种一步解法,即只要知道前一时间点的解y(tn-1),就可以立即计算当前时间点的方程解y (tn)。对大多数仿真模型来说,首先使用ode45 来解算模型是最佳的选择,所以在SIMULINK 的算法选择中将ode45 设为默认的算法。 ode23 是基于显式Rung-Kutta (2 , 3) 、Bogacki 和Shampine 相结合的算法,它也是一种一步算法。在容许误差和计算略带刚性的问题方面,该算法比ode45 要好。更换算法后,静差率基本没有变化,但ode23与ode45比系统震荡变大,且ode23的计算精度不太高,所以ode23一般用于计算精度不太高的场合。 odel13是可变阶数的Adams-Bash forth-Moulton PECE 算法,在误差要求很严时,odel13 算法较ode45 更适合。odel13 是一种多步算法,也就是需要知道前几个时间点的值,才能计算出当前时间点的值。仿真结果大致和上面几种运算方法的结果一致。但运算时间比上述三种方法的运算时间都要长。且系统振荡频率过大,稳定性变差。 ode15s 是一种基于数字微分公式的解法器(NDFs ),它相对BDFs 算法较好。它是一种多步算法,适用于刚性系统,当用户估计要解决的问题是比较困难的,或者不能使用ode45,或者即使使用效果也不好,就可以用ode15s 。由于它是一种多步解法器,所以运算时间相对长一点,
通信原理大作业 1、说明 在通信原理课程中,介绍了通信系统的基本理论,主要包括信道、基带传输、调制 / 解调方法等。为了进一步提高和改善学生对课程基本内容的掌握,进行课程作业方法的改革的试点,设立计算机仿真大作业。成绩将计入平时成绩。 2、要求 参加的同学3~5人一组,选择1?2个题目,协作和共同完成计算机编程和仿真,写出计算机仿真报告。推荐的计算机仿真环境为MATLAB也可以 选择其它环境。 3、大作业选题 (1) 信道噪声特性仿真产生信道高斯白噪声,设计信道带通滤波器对高斯白噪 声进行滤波, 得到窄带高斯噪声。对信道带通滤波器的输入输出的噪声的时域、频域特性进行统计和分析,画出其时域和频域的图形。 (2) 基带传输特性仿真利用理想低通滤波器作为信道,产生基带信号,仿真验证奈氏第一准则的给出的关系。改变低通滤波器的特性,再次进行仿真,验证存在码间干扰时的基带系统输出,画出眼图进行观察。加入信道噪声后再观 察眼图。 (3) 2ASK言号传输仿真 按照2ASK产生模型和解调模型分别产生2ASK言号和高斯白噪声,经过信道传
输后进行解调。对调制解调过程中的波形进行时域和频域观察,并且对解调结果进行误码率测量。2ASK信号的解调可以选用包络解调或者相干解调法。(4) 2FSK信号传输仿真 按照2FSK产生模型和解调模型分别产生2FSK信号和高斯白噪声,经过信道传输后进行解调。对调制解调过程中的波形进行时域和频域观察,并且对解调结果进行误码率测量。2FSK信号的解调可以选用包络解调或者相干解调法。(5) 2PSK信号传输仿真 按照2PSK产生模型和解调模型分别产生2PSK言号和高斯白噪声,经过信道传输后进行解调。对调制解调过程中的波形进行时域和频域观察,并且对解调结果进行误码率测量。2PSK信号的解调选用相干解调法。 ⑹2DPSK言号传输仿真 按照2DPSK产生模型和解调模型分别产生2DPSK言号和高斯白噪声,经过信道传输后进行解调。对调制解调过程中的波形进行时域和频域观察,并且对解调结果进行误码率测量。2DPSK信号的解调可以选用非相干解调或者相干解调法。 (7) 模拟信号的数字传输 产生模拟语音信号,进行PCM编码过程的计算机仿真。仿真发送端采样、 量化编码的过程、仿真接收端恢复语音信号的过程。按照有或者无信道噪 声两种情况分别进行仿真。
、数值计算,编程完成以下各题(共20分,每小题5 分) 1、脉冲宽度为d,周期为T的矩形脉冲的傅里叶级数如下式描述: d[i.^= sin(^d/T)cos(^:n.) T n」n rd /T 当n =150,d..「T =1;4,- 1/2 :::.::: 1/2,绘制出函数f(.)的图形。 解: syms n t; f=((si n(n *pi/4))/( n*pi/4))*cos(2*pi* n*t); s=symsum(f, n,1,150); y=(1+2*s)/4; x=-0.5:0.01:0.5; Y=subs(y,'t',x); plot(x,Y) 2 0 05x2 5 ■ 5 2、画出函数f (x)二(sin 5x) e .- 5x cos1.5x 1.5x 5.5 x 在区间[3, 5]的图形,求出该函数在区间[3, 5]中的最小值点X min和函数的最小值f min . 解:程序如下 x=3:0.05:5; y=(si n(5*x).A2).*exp(0.05*x.A2)-5*(x.A5).*cos(1.5*x)+1.5*abs(x+5.5)+x.A2.5; mix_where=fi nd(y==mi n(y)); xmin=x(mix_where); hold on; plot(x,y); plot(xmi n,min (y),'go','li newidth',5); str=strcat('(' ,nu m2str(xmi n),',' ,nu m2str(mi n(y)),')'); text(xmi n,min (y),str);
Ylabel('f(x)') 经过运行后得到的图像截图如下: 运行后的最小值点X min =4.6 , f m in = -8337.8625 3、画出函数f (x) = cos2x「e^'x — 2.5 X在口,3]区间的图形, 解该非线 并用编程求性方程 f (x) = 0的一个根,设初始点为X o = 2 . 解: x=1:0.02:3; x0=2; y=@(x)(cos(x).A2).*exp(-0.3*x)-2.5*abs(x); fplot(y,[1,3]); Xlabel('x') Ylabel('f(x)') X仁fzero('(cos(x).A2).*exp(-0.3*x)-2.5*abs(x)',x0) 运行后求得该方程的一个根为z=0.3256 。 4、已知非线性方程组如下,编程求方程组的解,设初始点为[1 0.5 -1].
计算机仿真技术
The computer simulation technology Abstract: With the development of information processing technology and network technology, simulation technology has not only limited to the performance test product or system integration after production, but also can be applied to the whole process of product models developed, including demonstration program, tactical and technical indicators feasibility studies, design analysis, manufacturing, testing, maintenance, training and so on various stages. System simulation technology is also knowned as system simulation technology, computer simulation of so-called electronic communications system, it is used of computer systems for real electronic communications or digital models of physical model tests. To analyze and study the performance of such a model experiment and working conditions of a real system. When tested in the actual study of electronic communication systems is difficult or impossible to achieve, simulation technology has become an inevitable choice。 Keyword:message,network,simulation,communication,research 计算机仿真技术 摘要:随着信息处理技术和网络技术的发展,仿真技术的应用已不仅仅限于产品或系统生产集成后的性能测试试验,更可应用于产品型号研制的全过程,包括方案论证、战术技术指标论证、设计分析、生产制造、试验、维护、训练等各个阶段。系统仿真技术也称为系统模拟技术,所谓电子通信系统的计算机仿真,就是利用计算机对实际电子通信系统物理模型或数字模型进行试验,通过这样模型实验来对一个实际系统的性能和工作状态进行分析和研究.当在实际电子通信系统中进行试验研究比较困难或者根本无法实现时,仿真技术就成为必然选择。 关键字:信息,网络,仿真,通信,研究 1、什么是计算机仿真技术: 仿真技术是伴随着计算机技术的发展而发展的。是一门多学科的综合性技术,它以控制论、系统论、相似原理和信息技术为基础,以计算机和专用设备为工具,利用系统模型对实际的或设想的系统进行动态试验,其可以再现系统的状态﹑动态行为及性能特征,用于分析系统配置是否合理﹑性能是否满足要求,预测系统可能存在的缺陷,为系统设计提供决策支持和科学依据。 [1]它具有经济、可靠、实用、安全、灵活、可多次重复使用的优点, 已经成为对许多复杂系统( 工程的、非工程的) 进行分析、设计、试验、评估的必不可少的手段。它是以数学理论为基础, 以计算机和各种物理设施为设备工具, 利用系统模型对实际的或设想的系统进行试验仿真研究的一门综合技术。在计算机问世以前,基于物理模型的实验一般称为“模拟”,它一般附属于其他相关学科。自从计算机特别是数字计算机出现以后,其高速计算能力和巨大的存储能力使得复杂的数值计算成为可能,计算机仿真技术得到了蓬勃的发展,从而使计算机仿真成为一门重要的学科。随着仿真应用的日益扩展,计算机仿真的外延也在延伸。如现代的各种仿真训练器:飞行器,船舶、轮机仿真训练器等,尽管在景观、声响、操纵和监控系统等方面大量地采用物理仿真,但其核心部分仍然是对系统及其各组成元件的实时计算机数学仿真。广义地.这些仿真也纳入了计算机仿真的范围。 2、现代仿真技术 现代仿真技术的重要进展主要体现在: 2.1系统建模方面: 传统上,多通过实验辩识来建立系统模型。近十几年来, 系统辩识技术得到飞速发展。在辩识方法上有时域法、频域法、相关分析法、最小二乘法等;在技术手段上有系统辩识设计、系统模型结构辩识、系统模型参数辩识、系统模型检验等[2]。除此之外,近年来还提出了用仿真方法确定实际系统模型的方法;基于模型库的结构化建模方法:面向对象建模方法等。特别是对象建模,可在类库基础上实现模型的拼合与重用。
第一套 一、单选题(共 10 道试题,共 50 分。) 1. 在Windows XP中,鼠标()可打开对象的快捷菜单。 A. 单击 B. 双击 C. 移动 D. 右击 2. 鼠标具有简单、直观、移动速度快等优点,但下列四项中不能用鼠标单击的是()。 A. 键盘按键 B. 菜单 C. 图标 D. 窗口按钮 3. 计算机的应用渗透到社会的各个领域,但其应用最早的领域是()。 A. 数据处理 B. 科学计算 C. 人工智能 D. 过程控制 4. 计算机按其处理数据的方式的不同,可分为()。 A. 模拟计算机和数字计算机 B. 专用机和通用机 C. 大型机和小型机 D. 主机和终端 5. CAPS LOCK键是()。 A. 大小写锁定键 B. 换档键 C. 退格键 D. 回车键 6. 以下关于内存与硬盘的说法,错误的是()。 A. 内存与硬盘都是存储设备 B. 内存的容量小,硬盘的容量相对大 C. 内存的存取速度快,硬盘的速度相对慢 D. 断电后,内存和硬盘中的所有信息均保留着 7. CPU不能直接访问的存储器是()。 A. RAM B. ROM C. 内存储器 D. 外存储器 8. 下列属于系统软件的是()。 A. PowerPoint 2003 B. Windows XP C. Foxmail D. Excel 2003
9. Windows XP操作系统中的“回收站”中不可能有()。 A. 文件夹 B. 硬盘中的文件 C. 快捷方式 D. U盘中的文件 10. 利用计算机来模仿人的高级思维活动,如智能机器人、专家系统等,应属于计算机应用中的()。 A. 科学计算 B. 数据处理 C. 过程控制 D. 人工智能 二、判断题(共 10 道试题,共 50 分。) 1. CAD指的是计算机辅助测试。 2. Word只能编辑文档,不能编辑图形。 3. 第三代计算机的核心部件是晶体管。 4. 计算机辅助测试是人工智能的应用领域之一。 5. Windows XP的窗口是不可改变大小的。 6. 存储器容量用字节数来衡量,其中2KB等于2000B。 7. 按计算机处理数据的方式分类可把计算机分为数字计算机、模拟计算机。 8. 当一个应用程序窗口被最小化后,该应用程序的状态被终止运行。 9. 机器语言编写的程序能被计算机直接执行。 10. 专家系统是人工智能的应用领域之一。 第二套 一、单选题(共 10 道试题,共 50 分。) 1. 下列域名的表示中错误的是()。 A. https://www.doczj.com/doc/253051976.html, B. https://www.doczj.com/doc/253051976.html, C. https://www.doczj.com/doc/253051976.html, D. SH163,NET,CN 2. IP地址能唯一确定Internet上每台计算机与每个用户的()。 A. 使用电脑的用户姓名 B. 费用 C. 位置 D. 时间 3. 在Excel中,对工作表的数据进行一次排序,Excel允许同时对()个关键字进行排序。 A. 只能一个 B. 只能两个 C. 最多三个 D. 任意多个
控制系统仿真大作业 1、曲线拟合的Matlab实现和优化度检验 通过一个实际的例子,介绍最小二乘曲线拟合法的基本原理,对最小二乘曲线拟合法的Matlab实现方法进行研究,并给出曲线拟合Matlab实现的源程序。论述了Matlab软件在做曲线拟合时的用法,并进行曲线的拟合和相应的图像。 2、基于Matlab的液位串级控制系统 运用组态王和Matlab混合编程的方法设计了一个双容(两个水箱串联)液位串级在线控制系统,由组态王编制人机交互界面,用Matlab完成控制算法,二者通过DDE进行实时数据交换;采用串级控制策略,减小二次干扰的影响,验证其方法的有效性。 3、基于Matlab的变压器差动保护闭环仿真研究 应用Matlab建立了微机保护仿真系统,并对不同原理的变压器差动保护进行了仿真和比较.仿真系统采用积木式结构,根据微机保护的实现原理构建模块,实现保护的闭环仿真,对保护的动作过程进行分析. 4、基于MATLAB/SIMULINK的交流电机调速系统建模与仿真 根据直接转矩控制原理,利用MATLAB/SIMULINK软件构造了一个交流电机调速系统,该系统能够很好地模拟真实系统,实现高效的调速系统设计。仿真结果验证该方法的有效性。 5、基于MCGS和MATLAB的薄膜厚度控制系统仿真 以MCGS组态软件和MATLAB为平台,设计和仿真了一个薄膜厚度控制系统.MCGS完成硬件接口的设置、数据的实时采集、人机对话、以动画的方式显示控制系统的运行情况,MATLAB完成PID参数的自动整定,并利用动态数据交换(DDE)技术建立两者间的通讯.并分析其仿真结果。 6、Matlab在动态电路分析中的应用 用Matlab计算动态电路,可得到解析解和波形图.一阶电路先计算3要素,后合成解