第二章陀螺全站仪 §2.1 陀螺仪及其基本特性(龚建) 一、陀螺仪及其分类 陀螺仪 凡是绕定点高速旋转的物体,或绕自身轴高速旋转的任意刚体,都称为陀螺。如图2-1所示,设刚体上有一等效的方向支点O。以O为原点,作固定在刚体上的动坐标系O-XYZ。刚体绕此支点转动的角速度在动坐标轴上的分量分别为ωx、ωy、ωz,若能满足以下条件: ωz>>ωx ωz>>ωy ωz≈Const (2-1) OZ 为进动运动。 转的地球,而近代物理中广义的定义是:凡是能测量物体相对惯性空间作旋转的装置都叫陀
螺仪,如激光陀螺仪。 陀螺仪的自由度 陀螺仪基本上是一个匀质的转子,其质量大部分集中在轮缘,它能围绕其质量对称轴高速旋转。将转子安置在特殊的悬挂装置上,没有外力作用,使其具有两个或三个回转轴的整个装置,称为具有两个或三个自由度的陀螺仪。 自由陀螺仪的结构如图2-2所示。转子1支撑在内平衡环2上可绕其对称轴作高速度转动,这个轴称为陀螺仪的自转轴,即陀螺主轴,或称X轴。由于转子只能围绕本身轴旋转,因此它具有一个自由度。 转子支撑在内平衡环上,内平衡环又支撑在外平衡环3上,转子和内平衡环一起可绕陀螺仪的内环轴转动,这个轴一般称为Y轴。由于转子既绕本身轴旋转,又可绕内环轴旋转,因此他具有两个自由度。 转子支撑在内平衡环上,内平衡环又支撑在外平衡环上,外平衡环又支撑在底座上,转子和内平衡环、外平衡环一起绕陀螺仪的外环轴转动,这个轴一般称为Z轴。此时由于转子既可绕本身轴旋转,又可绕内、外环轴旋转,因此它具有三个自由度。一般把由内环和外环构成的支架称为万向支架。 如果把陀螺仪的重心与陀螺仪的中心相重合,这种陀螺仪称为三自由度平衡陀螺仪。如果把三自由度陀螺仪限制Y轴或Z轴其中一个自由度,这种陀螺仪称为二自由度陀螺仪。如果把陀螺仪的外环轴下移,偏离陀螺仪的中心,这种陀螺仪称为下悬式陀螺仪或摆式陀螺仪。 摆式陀螺仪如图2-3所示,即在陀螺仪轴上加上悬重G,则重心由陀螺仪中心O下移到
舵减摇装置的发展 舵减摇是基于正确利用下述两条规律发展起来的: 在操舵时,舵除产生一个使舰船转向的艏摇力矩以外,还产生一个横摇力矩; 一般舰船的艏摇响应周期大约是横摇固有周期的一倍左右。 舵减摇装置可以在控制操舵系统完成保持航向功能的同时,还能进行更高频率(舰船横摇固有频率附近)的操舵,使舵产生横摇力矩而不影响舰船的正常航行。 与鳍减摇装置相比,舵减摇装置具有造价低、所占船内空间小、使用和维修方便,以及便于对原来没有配备减摇控制装置的现役舰船进行加装改造等优点。 早在1972年,就有人探讨了用舵作为稳定装置的可能性,并在一艘商船上试验成功。 早期美国舰船一般都不采用减摇鳍。后来为了提高舰船在风浪中的特殊作业功能(例如直升机的起降作业,保持拖曳线列阵有尽可能多的时间正常工作,以及补给作业等),设法寻找提高舰船耐波性的途径才考虑安装减摇装置。利用原有的舵机作为执行机构,加上相应的控制器达到减小横摇的目的,无疑是一个极好的可行的方案。1974年美国泰勒舰船研究发展中心(DTNSRDC)开始研究在军舰上安装减摇装置的可能性,并研制了两台样机。主要设计思想是: 供舰船作业期间短期使用(半小时左右)。 将舵减摇系统和自动驾驶仪分成两个独立的系统,简化舵减摇装置的设计与制造。 在使用舵减摇时,用人工操舵保持航向,一旦舵减摇装置发生故障,便可转换到自动舵。控制原理是采用了有自适应性的角速度模拟控制。这两台样机分别安装在两艘115米长、30 00吨的哈密尔顿级巡逻舰上,于1976年和1979年进行了海上试验。在横浪中,当有义波高为2.14~2.44米,航速为14节时,横摇角有义值从4.83度减小到2.45度,减摇效果达49.3%,此外横荡加速度也有所减小。 早期的舵减摇装置都是采用控制规律简单的模拟系统,鉴于当时技术水平,不可能实现更为复杂的控制规律,加之舰船原有舵机性能的限制,因此减摇效果不总是那么理想。1986年至1987年美国泰勒舰船研究发展中心和海军科技部又相继推出第一代和第二代数控舵减摇装置,第一代是利用原有舵机加上数字控制器使减摇性能又有提高。第二代不仅采用了数字控制器而且配上了为舵减摇而专门研制的新舵机,使减摇效果大幅度提高,甚至达到70%的减摇水平。由于原来的舵机操舵角速度只能在4度/秒以下,为了增大减摇力矩,如果舵机允许操舵角速度大于8度/秒,则舵减摇装置的性能将会有明显提高。另外,新研制的舵机将满足功率、结构载荷以及对磨损等新的要求。美国已经在斯普鲁恩斯级上进行了成功的试验,并研制了在航母上采用的舵减摇装置。 在美国获得试验成功的鼓舞下,80年代荷兰、瑞典等国也开展了舵减摇装置的研究。1984年瑞典哥德堡船模试验水池(SSPA)着首研制型号为ROLL-NIX的舵减摇装置。1987年在瑞典皇家海军两艘舰艇上进行了试验。一艘为巡逻艇(艇长35米,排水量170吨,航速27节),一艘为布雷舰(舰长105米,排水量3300吨,航速16节)。舵机速度都是8度/秒,在蒲氏风级4~6级的横浪和尾斜浪中减摇效果达40~60%。ROLL-NIX采用了基于现代控制理论的自适应滤波器和调节器,可适应海况和航速的变化。它的硬件有摩托罗拉MC 68000微机、角速度陀螺、自动舵控制、ROLL-NIX控制和电源控制器。共组成两个部件:主设备和控制单元。主设备约重12千克,体积约为0.5×0.2×0.3立方米。控制单元重约13千克,体积约为0.2×0.1×0.1立方米。可将它用于对现役舰船的原操舵装置进行改装,也可用于新船建造,只要1到2天就可以完成安装和调试。该装置利用微机对信号进行数字滤波,提高了控制质量。它也兼有航向自适应操舵仪的功能,在启用舵减摇时可任意选择用手舵和自动舵保持航向。当要求改变航向时,减摇控制会自动脱开。待进入指定方位后马上又
船舶减摇装置专利技术综述 随着绿色造船对环境安全与舒适性的要求越来越高,减少船舶摇晃、保证货物和船员的安全成为现代船舶设计的焦点之一。文章分析了减摇装置的专利主要申请国和专利申请量,并进一步分析了其技术演进过程及发展方向,以期对我国减摇技术的发展提供一定的指导作用,促进我国船舶减摇技术的发展。 标签:减摇装置;船舶;专利分析 1 概述 船舶从古至今都是很重要的水上运输、作战、作业的工具。船舶在海上航行时,由于受到海浪、海风及海流等因素的影响,不可避免地会产生各种摇荡,其中以横摇最为显著,影响也最大。剧烈的摇荡对舰船的适航性、安全性、以及设备的正常工作、货物的固定和乘员的舒适性都会有很大的影响。一直以来人们都在寻求减小船舶摇荡的方法,各类减摇装置虽然在形式、结构上有很大差别,但是原理基本相似:都是产生一个与摇摆方向相反的稳定力矩,使摆幅减小、摇摆周期增大,以达到缓和摇摆的目的。目前使用最为广泛的减摇装置有舭龙骨、减摇水舱、减摇鳍等。文章主要从全球专利情况出发,研究减摇装置的发展情况。 2 国内外专利申请概况 2.1 全球申请趋势分析 减摇技术的起源很早,图1为通过CNABS、SIPOABS、DWPI专利数据库检索得到的减摇装置相关专利文献的数量图。在1907年就有了相关申请,是德国人佛拉姆的一项关于减摇水舱的申请,公开号为DE227134C;其后相关专利的申请量一直在稳步上升,这一阶段属于技术的萌芽发展期;到1960年的时候,进入了第一次快速的发展期,然后1980年左右进入一个瓶颈期,申请量有所下降;1990年开始,进入了第二个快速发展期,仅仅2000年到2010年的相关专利申请量就达到了1900多件,中国的专利申请量也是此时开始大幅度增加。 2.2 主要申请国家分析 图2显示了主要国家的专利申请量。为了便于分析,仅仅提取了全球申请量排名前几位的国家进行研究,分别是美国、德国、日本、中国、韩国、挪威和荷兰。从图中可以看出,美国的申请量占这几个国家总申请量的38%左右,而其他的传统造船强国,如挪威、德国和荷兰,总申请量也达到33%,剩下的中国、日本和韩国分别占有14%、10%和5%,由此可见,中国在该领域的研究较美国、德国而言还需加大研究力度。 下面就美国、德国、日本和中国的申请量趨势进一步分析,如图3。
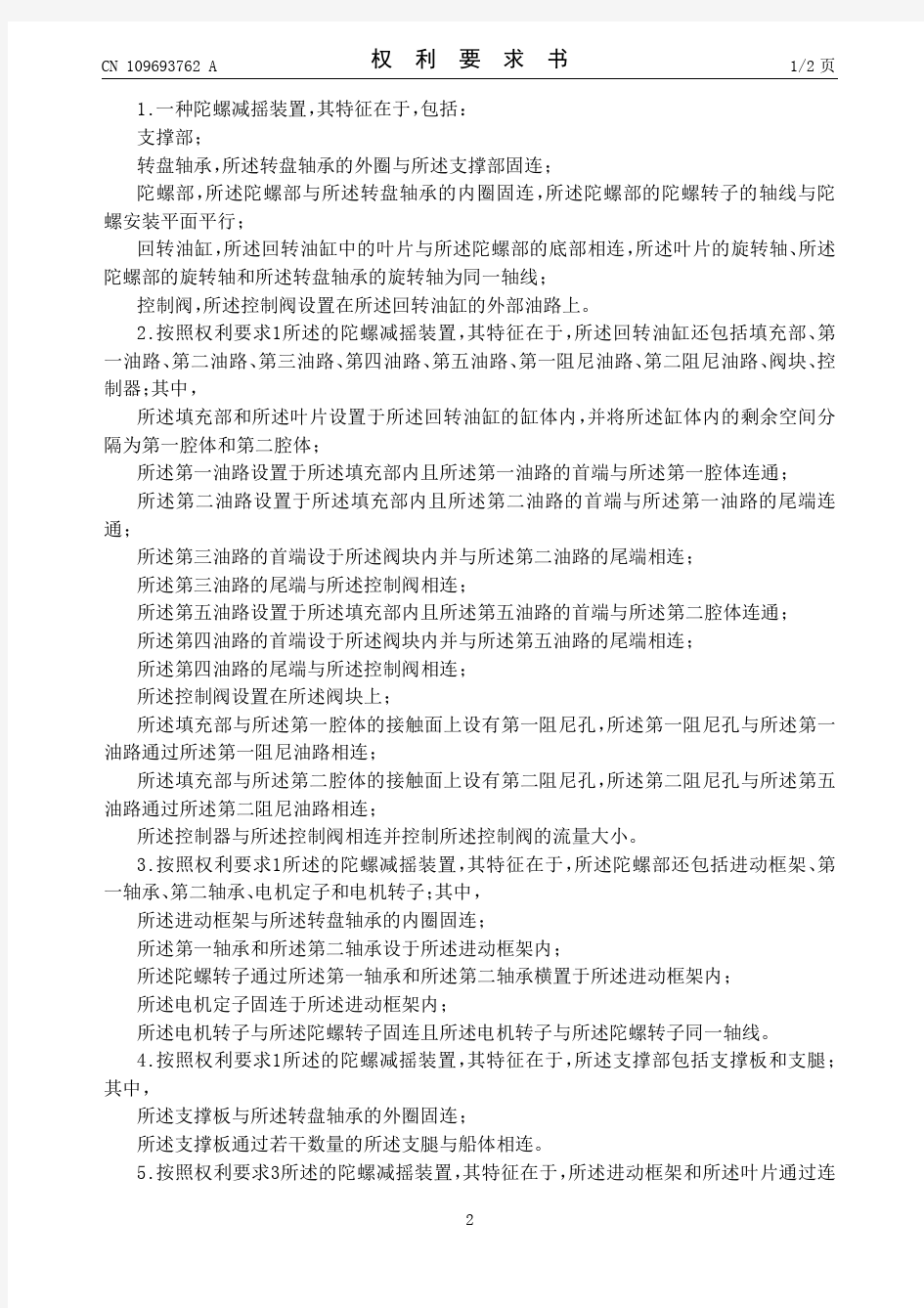
游艇陀螺减摇器 [摘要] 陀螺减摇器是最早在船舶上实际应用的减摇装置之一,它具有体积较小、安装方便、减摇效果较好、能在任意航速下减摇等优势。随着陀螺减摇器厂商的努力推广,特别是国产陀螺减摇器的出现,这种高档货已经逐步装上普通游艇,并将成为某些款型国产游艇的“标配产品”,为“低价高配”这一中国特色游艇业发展思路提供重要助力。 1. 陀螺减摇器是什么 陀螺减摇器是船舶减摇装置中的一种,主要由转子及其驱动装置、转子框架、转子框架进动控制装置、安装基架等部件构成。陀螺减摇器是一种两维陀螺,它利用了陀螺的定轴性原理,它对船艇产生的减摇力矩来源于转子框架进动时产生的反作用力矩。 船舶在波浪的作用下会发生摇摆,这是不可避免的。至于船的摇摆会有哪些副作用,人们首先想到的是晕船。其实,除此之外,大幅度的摇摆还会增加船的倾覆危险和操纵难度,还会降低船结构以及船上设备的使用寿命,如此等等,副作用确实不少。为了减摇,历史上工程师们尝试过几十种办法,而陀螺减摇器是最早在船舶上应用的减摇装置之一。
2. 陀螺减摇器有哪些优缺点 从功能角度讲,陀螺减摇器的减摇效果可以做到非常好,减摇率能达到60%以上,与减摇鳍相差不大。陀螺减摇器可以在任意航速下减摇,而普通减摇鳍不具备此功能。陀螺减摇器可以方便地解决船艇的参数横摇问题,而其它减摇装置很难做到。参数横摇是指由纵摇诱发剧烈横摇,形成多个运动成分的叠加,使乘员很不舒适,对船艇结构和船上设备的危害也更大。 从控制技术角度讲,设计一台能减摇的陀螺减摇器比设计一对普通减摇鳍,特别是比设计一套可控式被动减摇水舱要容易得多,问题只在于减摇率的高低。目前国际上号称能够设计陀螺减摇器的厂家很多,有品牌的就多于5家,而能够设计可控式被动减摇水舱的厂家只不过3、4家。 从安装、使用角度讲,陀螺减摇器的优势十分明显,它体积相对较小,可以安装在船艇上的任意位置,加装也比较方便。 陀螺减摇器的唯一缺点是比较难以大型化,绝大部分情况下应当用于排水量小于100吨的船艇。在国外,数千吨的驱逐舰上以及数万吨的豪华班轮上虽有安装陀螺减摇器的实例,但前提都是客户不在乎价格。
减摇装置介绍 近百余年来,人们一直致力于研究减缓船舶摇摆的措施。世界各国先后研究了近百种不同形式的减摇装置。但目前世界上广泛采用的仅是减摇水舱、舭龙骨和减摇鳍,其中居垄断地位的是减摇鳍,其减摇效果最佳。下面分别对上述三种减摇装置进行介绍。 一.减摇水舱 减摇水舱主要分为被动式减摇水舱和主动式减摇水舱两种。 A.被动式减摇水舱 将靠近船舯部两舷的水舱在底部用管道连接起来,舱内注入适量的水。利用船本身的横摇运动而引起水舱内水的物理运动来产生稳定力矩。它不要任何动力,所以称为被动式减摇水舱。它是各类减摇装置中比较简单、造价较便宜的一种。 被动减摇水舱(以下简称被动水 舱)最常用的是U型水舱和槽型水舱 (见右图)。 被动水舱的工作原理是使设计的 水舱内振荡的固有频率等于船横摇的 固有频率,这样在共振的情况下,水 舱是随船一起运动,而水舱里的水的 运动滞后横摇角90度。同时,当船横 摇的固有频率等于波浪的扰动力距频 率时,也发生共振,这时船的横摇角 滞后波浪力距90度。这样水舱力的水 的运动就滞后波浪扰动力矩180度。也就是说水舱里的水的重量引起的稳定力矩方向恰好和波浪扰动力矩方向相反,从而使共振区横摇减小。这就是所谓的“双共振减摇原理”。 被动减摇水舱仅在中等海况和在船舶初稳心高h限定范围以内,以很接近船舶固有频率附近提供有限的减摇效果,最好的减摇效果可达60~70%。离开共振区效果显著下降,在较长的遭遇周期上使横摇角增加。它的优点使设备简单、费用低及在任何航速下均有一定的减摇效果。 为了改善被动水舱的减摇性能,还有一种是可控被动减摇水舱。主要是在水舱通道上安装节流阀,通过横摇传感装置调节阀门开启和关闭的程度,控制水的流量,使这种减摇水舱比被动水舱能在较宽的频率范围内有效工作。 B.主动式减摇水舱 为了克服被动式减摇水舱的一些不足,有人提出了主动式减摇水舱。 主动式减摇水舱原理是依靠角速度陀螺感应船的横摇角速度信号,控制阀伺服机构,控制阀张开的大小由泵将水从一舷打到另一舷的水量建立稳定力矩。 主动式减摇水舱所需设备很多,主要包括控 制系统、伺服系统、测水舱内水头或压力、水流 速传感器、大功率的泵和原动机等(见右图)。 可见装置比较复杂,并且费用比较高,所以还没 有在实际中应用。 总之,减摇水舱对改善低速船、海上作业的浮 动平台等特种船舶的横摇性能具有独特的优点。