高浓度固液两相流的运动特性研究
倪晋仁1,2,黄湘江1,2
(1.大学环境科学中心;2.水沙科学教育部重点实验室)
摘要:利用固体颗粒运动的动理论,通过改变颗粒浓度可以考察非粘性颗粒在水流中运动的典型微观和宏观运动特性。本文分别对微观的颗粒速度分布函数变化和由此衍生的诸如颗粒平均速度、颗粒脉动速度和单位体积颗粒数垂线分布等宏观变量的变化进行了系统比较。研究结果表明:动理论能够比传统理论获得更详细的微观和宏观信息,也更适合研究高浓度固液两相流运动特性,颗粒运动微观和宏观特性在颗粒浓度超过一定阈值后会发生本质的变化,但临界颗粒浓度值(阈值)在不同的计算和实验条件下会有一定的差别。
关键词:高浓度挟沙水流,微观,宏观,特性,运动学理论
基金项目:国家自然科学基金资助项目(49625101)
作者简介:倪晋仁(1963-),男,山阴人,教授,主要从事环境科学及泥沙方面的研究。
高浓度固液两相流在生产实践中经常遇到。河流中的泥沙含量高,可能导致
河道淤积、河床抬高和洪水频率增加[1]。高浓度固液两相流的流动和输运特性与
低浓度固液两相流有着很大的不同。高浓度挟沙水流经常表现出非牛顿流体的特
性[2],不同于低浓度时的牛顿流体。以往对于高浓度固液两相流的描述多基于宾
汉塑性体模型或拜格诺的膨胀体模型[3,4]。就含有粘性颗粒的高浓度固液两相流
而言,中国学者提出了许多关于屈服应力和宾汉粘性系数的经验表达式,这些表
达式都采用颗粒浓度和反映颗粒大小组分的变量。Chen[5]曾对这方面的研究工作
进行了全面的评述。就含有非粘性颗粒的高浓度固液两相流而言,以往的研究[6]
多从Bagnold[3]的颗粒离散应力概念出发。Chen[7]的粘塑体模型包含了以上两种
情况。最近,新的流变模型研究又有进展,并用于描述高浓度挟沙水流的复杂特
性,参见Chen[8]和Brufau[9]等。通常描述固液两相流的连续介质理论[10]能够合理
地描述流体和颗粒的宏观运动特性,但不能充分解释颗粒与颗粒的相互作用,更
不能描述颗粒运动的微观特性。采用基于Boltzmann方程的动理论能够很好地
描述个体颗粒运动和颗粒之间相互作用的微观特性。这个方法类比自气体分子运动论,一旦微观的颗粒速度分布函数已知,固液两相流的微观和宏观特性都可得到很好的认识。尽管动理论过去多被用于描述低浓度固液两相流,近年来该方法已经被用于高浓度固液两相流研究中。例如,倪晋仁和王光谦[11~14]曾应用动理论研究高浓度固液两相流中悬浮颗粒垂向分布。本文则将动理论的应用扩展到研究高浓度固液两相流的主要微观运动特性(如颗粒运动速度分布函数变化)和宏观
运动特性(如颗粒平均速度、颗粒脉动速度和单位体积颗粒数等)。为此,从颗粒速度分布函数的微观信息入手,探讨颗粒浓度由低向高变化时固体颗粒特性的响应变化。
1 颗粒微观和宏观特性的主要变量
王光谦和倪晋仁[15,16]曾在低浓度固液两相流研究中引入了动理论,并建议固相颗粒类比气体分子运动用Boltzmann方程
(1)
来描述。方程右边是反映颗粒碰撞影响的积分项。在低浓度固液两相流中,颗粒碰撞影响较小,积分碰撞项通常被忽略。颗粒速度分布函数f=f(v i,x i,t)是在空间坐标x i和时间t颗粒速度介于v i和v i+dv i的颗粒数目,其中dv i=dv1dv2dv3,v i 是颗粒的随机速度,F i是作用在颗粒上的单位质量力,它包括重力和液相的作用力。
颗粒速度分布函数f能够很好地反映颗粒运动的特性。颗粒速度分布函数的任何变化都将引起一系列颗粒运动宏观特性的变化[12,13]。例如,单位体积颗粒数目为
n=∫fdv i(2) 相密度为
ρ=∫mfdv i(3) 其中m是单个颗粒的质量。颗粒平均速度为
=1/ρ∫mv i fdv i(4)
i
颗粒的脉动速度为
v′i=v i-i(5) 颗粒脉动速度的均方值为
′2=1/ρ∫m(v i-i)(v i-i)fdv i(6) 2 颗粒运动的微观特性
颗粒速度分布函数是颗粒运动最重要的微观特性。王光谦和倪晋仁[16]在平衡条件下针对低浓度固液两相流,通过忽略式(1)中的复杂碰撞项得到了一个与Champan & Cowling所推导形式类似的方程。当积分碰撞项很小并可被忽略时,
得到了相应于低浓度固液两相流情形下(颗粒体积浓度小于0.05)的颗粒速度分布函数
f 0=n 0exp{-α/2u 2L /u 2*[3/2ρL /ρp H/DC d (1-C l /C d )(1-u)2-(u-u 0)2]}÷
{-α/2u 2L /u 2*[3/2ρL /ρPH/DC d (1-C l /C d )(1-u)2-(u-u 0)2]}du
(
7
) 其中,u=v/u L 和u 0=v 0/u L .
α=0.2(1+0.22/u *)η/1+η, (8)
u 0=0.3(0.45+0.1/u *)1+η/1+1.6
(9)
n 0=n a exp(-A *(η-ηa )), (10)
A *=15ω(1-v )n1/u *
(11) 式中:v 0为颗粒参考速度;ω为颗粒沉降速度;u *为剪切速度;D 为颗粒粒径;H 为水深;u L 为流体的平均流速;C d 为综合阻力系数;C l 为综合升力系数;ρP 为颗粒密度;ρL 为流体密度;为颗粒垂线平均的体积浓度;ηa 为参考点位的相对高度;g 为重力加速度;n 1为指数。
在高浓度固液两相流中碰撞项不能再被忽略。在这种情况下,可以采用与分子气体运动论中类似的方法进行简化
=-f-f 0/τ (12)
其中,f0是低浓度条件下的颗粒速度分布函数,与高浓度下的颗粒速度分布函数f不同;τ为松弛因子,可以表示为
τ=l/v z(13) 其中,l与固液两相流中固体颗粒在垂向运动的平均自由程成正比,可近似地视为一常数(实际可能是颗粒特征的函数);v z是等向速度场中的颗粒速度。考虑恒定流动,则Boltzmann方程简化为
(14)
f=f0-1/v z(v i-F i)
作为一阶近似,再次采用气体分子运动理论中的处理方法[12,14],可以得到高浓度和低浓度固液两相流条件下的颗粒速度分布函数之间的关系
(15)
f=f0-l-mβglf0
或者
(16)
f=f0-L-ALf0
其中,L=l/H,η=z/H,A=kmβgH,k为反映颗粒浓度影响的系数;H为水深;β为Lagrange系数[15]。
为与作者以前的工作具有可比性和一致性,本文仍采用Michalik[17]的实验作为计算条件。Michalik的实验是在径为200mm的方管中进行的,挟沙水流由密
度为ρp=2.65g/cm3的固体颗粒和密度为ρL=1.0g/cm3的水组成的固液混合流。颗粒的代表粒径为d50=0.45mm。颗粒的垂线平均体积浓度()变化围为0.15~0.54。流体的运动粘滞系数为υ=0.01cm2/s,对应的颗粒雷诺数
Re=VDυ=8×105。在给定的颗粒粒径和温度条件下,颗粒沉降速度为
ω=6.15cm/s。
液相流体的速度分布可以根据修正的窦国仁公式(1987)计算,即
u L/u*=2.5ln[1+u*z/5ν]]+7.05(u*z/ν/1+u*z/ν)2+2.5(u*z/ν/1+u*z/ν)
(17)
+0.5[1-cos(πz/H)]
这一处理方法可能在高含沙量条件下带来一定的误差,但根据作者采用其它流速分布公式进行比较,对所得结论不会有明显影响。在具体计算时,这方面值得继续改进。
当颗粒浓度很高时,流体相关参数的测量存在很大困难。在求解方程过程中,边界条件假设符合如下公式
f b=N b1/exp(-(u-u b)2/2σ2b) (18) 其中,f b为床面位置处的颗粒速度分布函数;N b为床面处的单位体积颗粒数;σ
为床面处颗粒速度分布函数的标准偏差;u b为床面处颗粒分布函数的平均速度。b
在过去研究成果L=3的基础上,进一步考虑高浓度条件下颗粒浓度的影响,并采用经验系数k=30(-0.5)2进行修正。L的大小间接反映与平均自由程的比例关系,与颗粒连续两次碰撞所用时间有关。取床面作为参考点,即ηa=0,便
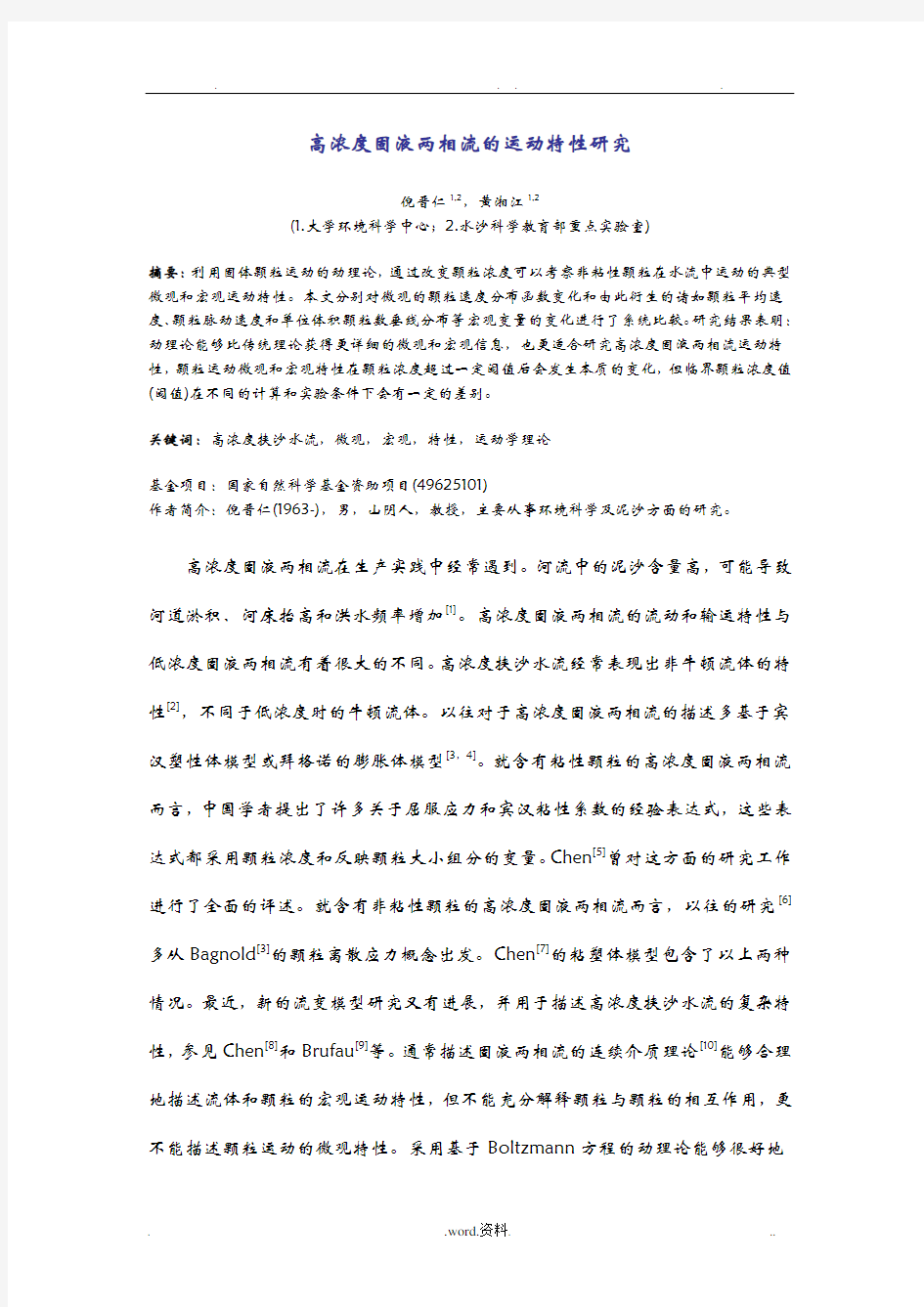
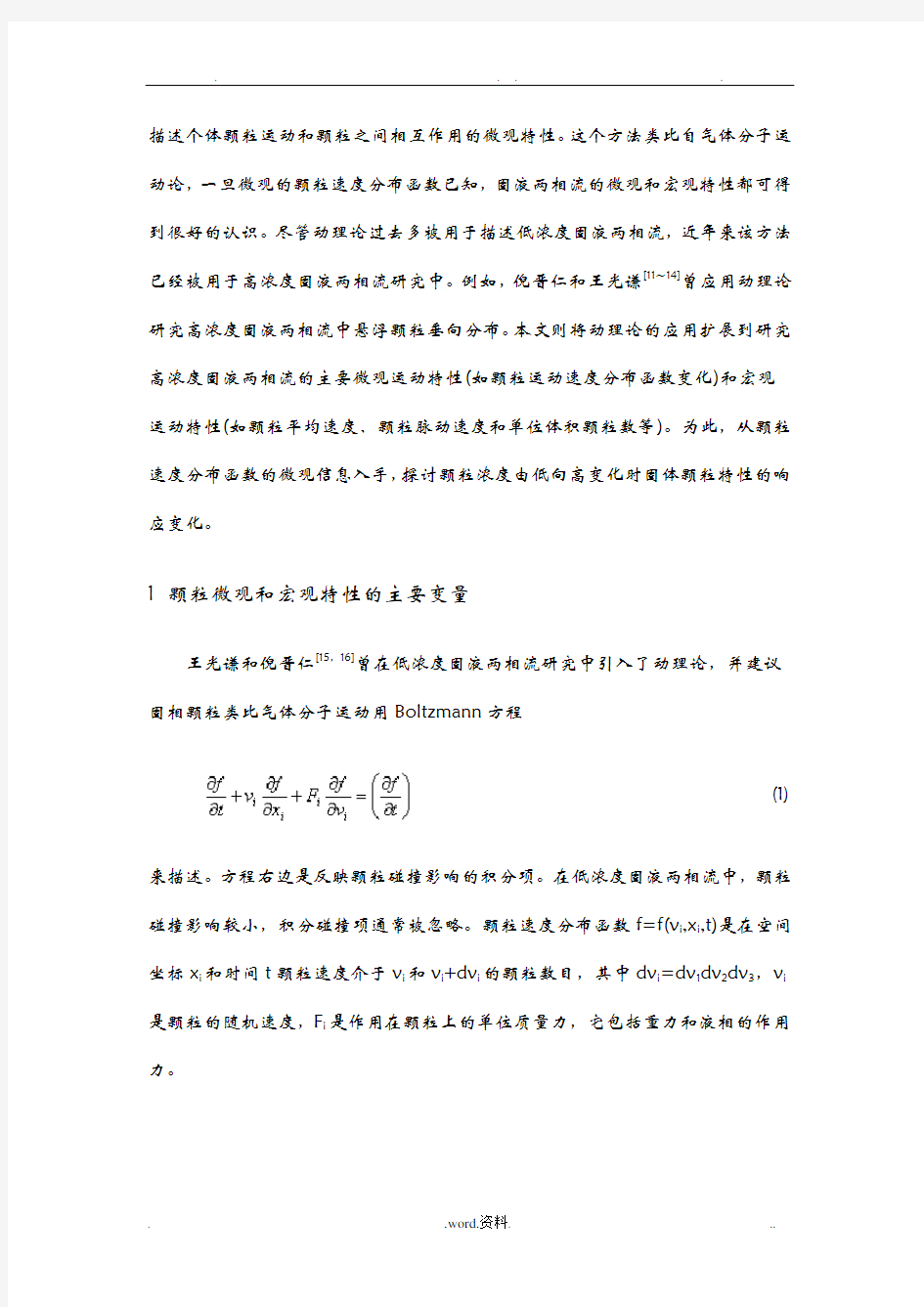
可通过求解上述诸方程得到相应的数值解(见图1和图2)。若定义颗粒速度概率密度分布函数为p(u)=(1/n)f,则会相应用到两个参数,一个是对应颗粒速度概率密度分布函数取最大值时的特征速度u c,另一个反映概率密度分布函数形态的标准偏差σ。当颗粒浓度给定时,图1和图2仅给出了沿垂直方向上相对水深为z/H=0.1,0.5和0.9的部分计算结果;颗粒平均体积浓度的变化则给出了=0.15,0.27,0.31,0.42和0.54的代表情形。
图1 不同颗粒浓度条件下的概率密度分布函数p(u)=(1/n)f变化
分析表明,尽管对应于最大
颗粒速度概率密度分布函数
值的特征速度u c从床面向上
呈不断增加的趋势,但在垂
直方向的任一位置上基本不
受颗粒平均浓度变化的影
响,见图3。然而,颗粒平均
浓度的变化却明显地影响着
标准偏差σ的变化。由图4
可见,沿垂线任意高度上,
σ随的变化可以大致分
为三个阶段:即对应于
<0.31的第一阶段,对应
于=0.31~0.42的第二阶
段,和对应于>0.42的第
三阶段。在第一阶段,σ随
的增加而缓慢减小;在第
图2 不同垂直高度下的概率密度分布函数p(u)=(1/n)f变化二阶段,σ随的增加而基
本不变;在第三阶段,σ随
的增加而急剧减小。
应该指出,不同阶段划
固液两相流泵的研究现状和进展 摘要:本文重点阐述了固液两相流泵的研究现状,从叶轮内部磨损、固体颗粒运动规律、固液两相流动规律和结构优化等几个方面对固液两相泵的研究现状进行了综述,最后提出了展望。 关键词:固液两相流泵研究现状结构优化 1、引言 两相流泵是在工业生产各部门应用广泛的流体机械,在水利、煤炭、矿山、化工、电力、建材、土建、冶金等行业都起着重要的作用。多年来液固两相流泵的设计大多都是按输送清水介质设计的,这样导致了泵的运行效率低,噪声大,局部磨损严重,造成能源和设备的大量浪费[1]。为克服上述缺点,国外在20世纪30年代就把两相流理论运用到渣浆泵的设计中,并取得了很大的成就。 我国对液固两相流泵的研究开始于20世纪70年代末80年代初,直到80年代中期才逐步得到应用。 在流体力学中,将动力学性质相同的一群物质称为一相。据此,一个包含两种以上不同态物质的流动是多相流;有时也把流动中包含的不同尺寸和形状的物质颗粒,当不同的相来处理,例如可以根据具体情况,把同流体一起运动的不同形状、不同尺寸的各种固体颗粒分成许多不同的相。对多相流中的每一相都需要一租力学和热力学的参数来描述,同时还要考虑相间的力学耦合关系,多相流通常是由连续介质与不连续介质组成的流体流。连续介质称为连续相,不连续介质称为分散相。一般碰到的多相流,往往是在连续相中含有分散相的均匀的混合物的两相流动,如固液两相流、气液两相流等[1]。 我们把专门输送多相流体的泵称为多相流泵,特别地把输送两相流体的泵叫两相流泵。这里我们只讨论固液两相流体的问题。 2、研究现状 由于固液两相流动的复杂性和特殊性,所以固液两相流泵在性能、噪声、寿命等方面存在着较大的缺陷。为了克服上述缺点,国内外学者先后通过理论分析,实验研究和数值模拟等方法深入研究固液两相流泵的流动机理,优化泵的设计来提高其效率和寿命,降低噪音。
弹性联轴器运动与动力特性 1.1 弹性联轴器的刚度和阻尼 弹性联轴器由于具有能产生较大弹性变形和阻尼作用的弹性元件,因此除能补偿两轴相对位移外,还能起缓冲和吸振的作用。弹性联轴器能适应载荷的波动,所以其应用较广,类型也较多。这种联轴器的缓冲和吸振性能主要与其刚度和阻尼有关。 联轴器的刚度可分为径向刚度、周向刚度和扭转刚度。由于载荷变化多数以扭矩波动形式出现,由此引起的振动也是以扭转振动为主,所以联轴器最主要的刚度是扭转刚度。扭转刚度易产生单位扭转变形所需的扭矩表示。通常,由于传动轴系中其它零件的刚度都比弹性联轴器的刚度大得多。所以为了简化起见,其它零件的弹性可以略去不计。仅考虑联轴器弹性,并根据这一情况以联轴器的刚度作为传动轴系的刚度。 刚度可用下式表示: C=T/(3-1) 式中 T——联轴器传递的扭矩; ——在扭矩作用下两半联轴器的相对扭转角。 当轴系接近发生共振时,刚度随扭矩增大而增大,改变传动轴系的固有频率与振动频率之间的关系,就能避开共振。 弹性联轴器在传递不稳定扭矩的过程中,弹性元件的弹性变形随扭矩的改变而增减。由于变形的不稳定,在弹性元件相对运动的接触表面上产生外摩擦,同时在弹性元件内部还存在内摩擦。这些摩擦将吸收一部分动能转化为热能,使温度升高。这就是联轴器的阻尼作用。阻尼作用能实现缓冲和衰减振动。联轴器的阻尼性能可以用阻尼系数表示。它是每一次载荷循环中产生的阻尼能和储存在扭转弹性元件中的变形能之比,即ф=W d/W e。在振动运动微分方程中,粘滞阻力系数用γ来表示,它与阻尼系 数之间的关系为γ=,ω为振动频率或绕动力矩变化频率。阻尼系数大,由于摩擦而消耗的能量就多,反之,阻尼系数小,由于摩擦而消耗的能量就少。 弹性联轴器一般都有缓冲和吸振功能,但是具有某一定值弹性的联轴器,并不是在任意的变扭矩作用下都能产生减振的效果,有时反而会引起更强烈的振动。其原因不在于此联轴器的刚度大小。可见,只有刚度和整个传动轴系的其他参数和载荷协调时,才能产生减振效果。因此,必须根据课题条件,通过计算来定出联轴器的刚度。 1.2 周期性载荷作用下的动力特性计算 对于某一已定的传动轴系,转动惯量和固有频率可由计算求得,如果已知所传扭矩的变化规律,如振幅和频率等,就能建立起轴系在扭转振动式的运动微分方程,对该方程求解,即可得到所需的联轴器的刚度。 为了便于求解运动微分方程,需要对传动轴系中联轴器的主动和从动两侧的转动惯量和刚度作力学模型的简化。根据具体结构情况,可以将轴系简化为若干个等效转动惯量圆盘,以具有某一刚度的周联系起来。通常比较典型的是简化为两个等效的圆
高浓度固液两相流的运动特性研究 倪晋仁1,2,黄湘江1,2 (1.大学环境科学中心;2.水沙科学教育部重点实验室) 摘要:利用固体颗粒运动的动理论,通过改变颗粒浓度可以考察非粘性颗粒在水流中运动的典型微观和宏观运动特性。本文分别对微观的颗粒速度分布函数变化和由此衍生的诸如颗粒平均速度、颗粒脉动速度和单位体积颗粒数垂线分布等宏观变量的变化进行了系统比较。研究结果表明:动理论能够比传统理论获得更详细的微观和宏观信息,也更适合研究高浓度固液两相流运动特性,颗粒运动微观和宏观特性在颗粒浓度超过一定阈值后会发生本质的变化,但临界颗粒浓度值(阈值)在不同的计算和实验条件下会有一定的差别。 关键词:高浓度挟沙水流,微观,宏观,特性,运动学理论 基金项目:国家自然科学基金资助项目(49625101) 作者简介:倪晋仁(1963-),男,山阴人,教授,主要从事环境科学及泥沙方面的研究。 高浓度固液两相流在生产实践中经常遇到。河流中的泥沙含量高,可能导致 河道淤积、河床抬高和洪水频率增加[1]。高浓度固液两相流的流动和输运特性与 低浓度固液两相流有着很大的不同。高浓度挟沙水流经常表现出非牛顿流体的特 性[2],不同于低浓度时的牛顿流体。以往对于高浓度固液两相流的描述多基于宾 汉塑性体模型或拜格诺的膨胀体模型[3,4]。就含有粘性颗粒的高浓度固液两相流 而言,中国学者提出了许多关于屈服应力和宾汉粘性系数的经验表达式,这些表 达式都采用颗粒浓度和反映颗粒大小组分的变量。Chen[5]曾对这方面的研究工作 进行了全面的评述。就含有非粘性颗粒的高浓度固液两相流而言,以往的研究[6] 多从Bagnold[3]的颗粒离散应力概念出发。Chen[7]的粘塑体模型包含了以上两种 情况。最近,新的流变模型研究又有进展,并用于描述高浓度挟沙水流的复杂特 性,参见Chen[8]和Brufau[9]等。通常描述固液两相流的连续介质理论[10]能够合理 地描述流体和颗粒的宏观运动特性,但不能充分解释颗粒与颗粒的相互作用,更 不能描述颗粒运动的微观特性。采用基于Boltzmann方程的动理论能够很好地
第一节矿井提升运动学 一、提升速度图 竖井提升速度图因提升容器的不同一般可分为箕斗提升速度图(六阶段速度图)和罐笼提升速度图(五阶段速度图)。 图5一l所示为常采用的交流拖动双箕斗提升系统六阶段速度图,因它具有六个阶段而得名。速度图表达了提升容器在一个提升循环内的运动规律,现简述如下: 图5-1 箕斗提升六阶段速度图 (1)初加速度阶段t0 提升循环开始,处于井底装载处的箕斗被提起,而处于井口卸载位置的箕斗则沿卸载曲轨下行。为了减少容器通过卸载曲轨时对井架的冲击,对初加速度a0及容器在卸载曲轨内的运行速度v0 。要加以限制,一般取Vo≤1.5 m/s 。 (2)主加速阶段t1 当箕斗离开曲轨时,则应以较大的加速度a1运行,直至达到最大提升速度vm ,以减少加速阶段的运行时间,提高提升效率。 (3)等速阶段t2箕斗在此阶段以最大提升速度v m运行,直至重箕斗将接近井口开始减速时为止。 (4)减速阶段t3重箕斗将要接近井口时,开始以减速度a3运行,实现减速。 (5)爬行阶段t4重箕斗将要进入卸载曲轨时,为了减轻重箕斗对井架的冲击以及有利于准确停车,重箕斗应以低速v4爬行。一般v4=0.4~0.5m/s,爬行距离v4 =2.5~5m。 (6)停车休止阶段t5当重箕斗运行至终点时,提升机施闸停车。处于井底的箕斗进行装载,处于井口的箕斗卸载。箕斗休止时间可参考表5—1。 图5—2所示为双罐笼提升系统五阶段速度图。因为罐笼提升无卸载曲轨,故其速度图中无t0阶段。为了准确停车,罐笼提升仍需有爬行阶段,故罐笼提升的速度图为五阶段速度图。罐笼进出车休止时间参考相应手册。
二、最大提升速度 由式(1-1)计算的经济速度v j ,并不是提升机的最大提升速度v m ,但值尽可能是接近值。而最大提升速度值应如何确定呢?提升机的卷筒是由电动机经减速器拖动的。提升机卷筒圆周的最大速度与电动机额定转数n e 及减速器传动比i 有关,其关系如下式所示: )/(60s m i Dn v e m π= 5-1) 式中:D 为提升机卷筒直径,m ;i 为减速器传动比, n e 为电动机额定转数,r /min 由式(5—1)计算的最大提升速度v m ,因每台提升机所选配的电动机转数的不同和减速器速比的不同而具有有限的几个数值,这有限的几个数值均称为提升机的标准速度—最大提升速度。应该注意的是,选取v m 时,即选择转速n e 和传动比i 时,应使v m 值接近v j 值。其办法可从下列有关的表中查找(各表(见课本)的值是据式(5—1)计算得出的)。 在表中找出与v j 值最接近的v m 值,该值即为确定的提升最大速度——标准速度,这样,即可定出与确定的v m 值相对应的电动机转速和减速器的传动比。 根据式(8—1)得到的标准速度值必须符合《煤矿安全规程》对提升最大速度的有关规定: (1) 竖井中升降物料时,提升容器最大速度不得超过下式算出的数 )/(6.0s m H v m ≤ (5-2) (2)竖井中用罐笼升降人员的最大速度不得超过下式算出的数值,且最大不得超过16m /s 。)/(5.0s m H v m ≤ (5-3)三、提升加速度和减速度的确定
曲柄连杆机构运动及动力特性分析 学生姓名: 学号: 专业: 院(系): 完成时间: 摘要 本文针对柴油机曲柄连杆机构运动和动力特性分析,运用自己在理论力学、高等数学、线性代数、工程力学等科目的知识,深入的分析了曲柄连杆机构在运动过程中的运动规律,并且用代数的方法精确地了得出了机构在运动过程中机构中主要零件的运动规律和所承爱的力及力矩变化关系式,并且以 EA1113柴油机为例,进行了精确的计算。从而为设计曲柄连杆机构和减小发动机震动提供了理论支持。 关键词:曲柄连杆机构;运动分析;力学分析特性
目录 第1章柴油机介绍.......................... .. (4) 1.1柴油机概述 (4) 1.2柴油机系统的机构及工作原理 (4) 第2章柴油机的运动和力析 (5) 2.1曲柄连杆机构的类型 (5) 2.2曲柄连杆机构运动分析 (6) 2.2.1活塞位移 (7) 2.2.2活塞的速度 (8) 2.2.3活塞的加速度 (9) 2.3曲柄连杆机构中的作用力 (9) 2.3.1气缸内工作物质的作用力 (9) 2.3.2机构的惯性力 (11) 2.4本章小结 (17) 第3章国内外柴油机的发展现状 (17)
前言 人们想起柴油车,总会想起浓烟滚滚、噪音大等等问题,其实随着2003年第三代电控高压共轨喷射系统的发展,噪音问题和柴油机震动问题都有了改善,新一代的柴油发动机在保障噪音低和震动小的前提下,还拥有经济性好,动力大等优点。这吸引了国际上有关大公司对柴油发动机的热情,也大大促进了柴油车在国外的销售,如今欧洲柴油车已经抢夺了汽油车的半壁江山,而部分车型,比如路虎在欧洲90%都是柴油版本。 柴油车的优点如此突出,然而振动问题和噪声问题却日益突出,致使其零部件磨损加重、噪声升高、寿命降低、工作条件恶化。柴油机的曲轴是整个发动机中最重要的零件之一。它的受损及破坏可能引起柴油机其它零件的损坏,特别是随着发动机的强化与技术发展,使曲轴的工作条件愈发苛刻。曲轴是柴油机最重要的零部件之一,它的任务是将活塞的往复运动转换为旋转运动,并向外输出功率。柴油机的可靠性和寿命很大程度取决与曲轴的可靠性。在周期性变化的动载荷的作用下,柴油机的主要零部件在柴油机工作转速范围内发生强烈共振,严重影响柴油机工作的可靠性,在深入研究柴油机曲柄连杆机构工作过程与原理基础上,分析其运动过程于受力情况。本文针对柴油机曲柄连杆机构运动和动力特性分析,运用自己在理论力学、高等数学、线性代数、工程力学等科目的知识,深入的分析了曲柄连杆机构在运动过程中的运动规律,并且用代数的方法精确地了得出了机构在运动过程中机构中主要零件的运动规律和所承爱的力及力矩变化关系式,并且以EA1113柴油机为例,进行了精确的计算。在本文的末尾还将最近几年在柴油机领域的发展现状做了一个大致的概括和总结,让我们可以更好地了解柴油机的发展趋势,从而为设计曲柄连杆机构和减小发动机震动提供了理论支持。
运动学、静力学、动力学概念 运动学运动学是理论力学的一个分支学科,它是运用几何学的方法来研究物体的运动,通常不考虑力和质量等因素的影响。至于物体的运动和力的关系,则是动力学的研究课题。 用几何方法描述物体的运动必须确定一个参照系,因此,单纯从运动学的观点看,对任何运动的描述都是相对的。这里,运动的相对性是指经典力学范畴内的,即在不同的参照系中时间和空间的量度相同,和参照系的运动无关。不过当物体的速度接近光速时,时间和空间的量度就同参照系有关了。这里的“运动”指机械运动,即物体位置的改变;所谓“从几何的角度”是指不涉及物体本身的物理性质(如质量等)和加在物体上的力。 运动学主要研究点和刚体的运动规律。点是指没有大小和质量、在空间占据一定位置的几何点。刚体是没有质量、不变形、但有一定形状、占据空间一定位置的形体。运动学包括点的运动学和刚体运动学两部分。掌握了这两类运动,才可能进一步研究变形体(弹性体、流体等)的运动。 在变形体研究中,须把物体中微团的刚性位移和应变分开。点的运动学研究点的运动方程、轨迹、位移、速度、加速度等运动特征,这些都随所选的参考系不同而异;而刚体运动学还要研究刚体本身的转动过程、角速度、角加速度等更复杂些的运动特征。刚体运动按运动的特性又可分为:刚体的平动、刚体定轴转动、刚体平面运动、刚体定点转动和刚体一般运动。 运动学为动力学、机械原理(机械学)提供理论基础,也包含有自然科学和工程技术很多学科所必需的基本知识。 运动学的发展历史 运动学在发展的初期,从属于动力学,随着动力学而发展。古代,人们通过对地面物体和天体运动的观察,逐渐形成了物体在空间中位置的变化和时间的概念。中国战国时期在《墨经》中已有关于运动和时间先后的描述。亚里士多德在《物理学》中讨论了落体运动和圆运动,已有了速度的概念。 伽利略发现了等加速直线运动中,距离与时间二次方成正比的规律,建立了加速度的概念。在对弹射体运动的研究中,他得出抛物线轨迹,并建立了运动(或速度)合成的平行四边形法则,伽利略为点的运动学奠定了基础。在此基础上,惠更斯在对摆的运动和牛顿在对天体运动的研究中,各自独立地提出了离心力的概念,从而发现了向心加速度与速度的二次方成正比、同半径成反比的规律。
固液两相流中颗粒受力及其对垂向分选的影响 孟晓刚1,2,倪晋仁1,2 (1.北京大学环境工程系;2.水沙科学教育部重点实验室) 摘要:在不同颗粒浓度条件下,通过考虑颗粒之间的相互作用,对固液两相流中的颗粒受力进行了分析。采用拉格朗日方法对颗粒在一维两相流中垂向运动过程进行了模拟。根据两相流中颗粒分选达到准稳定状态时的分选特征,探讨了作用于颗粒的各种力对颗粒运动和分选结构的影响。推导出颗粒受力与颗粒分选机理之间的关系。 关键词:固液两相流;颗粒;垂向分选;受力 作者简介:孟晓刚(1976-),男,山西文水人,研究生,主要研究方向:固液两相流理论。 颗粒受力分析是固液两相流中固体颗粒运动研究的核心问题[1]。Stokes (1851)曾对单个圆球、圆柱体和无限长平板在粘性流体中的简谐直线运动进行了较为详尽的研究,给出了反映流体对物体作用的数学表达式。此后,Basset (1888)、Boussineaq(1885)、Oseen(1927)等研究了粘性流体中做加速运动的单个圆球的直线运动,指出作用在圆球上的力不仅取决于它的瞬时速度和加速度,而且与圆球做加速运动的历史有关,从而得到了著名的B.B.O.方程。Tchen[2]进一步改进了B.B.O.方程,考察了不稳定紊流场中悬浮颗粒的运动,并给出了描述细颗粒运动的基本方程。 当流体中有多个颗粒存在时,颗粒的受力情况与单颗粒会有所不同。任意一个颗粒的运动都可能受到其它颗粒的影响,颗粒之间作用的主要形式有接触、位置交换和颗粒之间的碰撞。同时,大量颗粒的存在会影响液相的流动特性,后者的变化又会反过来影响颗粒的运动。因此,对于多颗粒存在的情形,需要对B.B.O.方程进行修正以便能够考虑颗粒之间的作用。黄社华等[3]在忽略粒间碰撞作用的前提下,在不同流动条件下对各作用力修上,得到了任意流场中稀疏颗粒运动方程的一般形式,并对方程进行了理论解析,探讨了颗粒物理性质对其运动规律的影响。对于颗粒碰撞不易忽略的情形[4],一种简便的方法是对颗粒受到流体的惯性作用和颗粒浓度影响进行修正。对于颗粒间的相互作用,可采用Bagnold[5]关于同心圆筒 间悬浮粗颗粒的剪切试验结果,即颗粒剪切应力和粒间离散应力在惯性作用区的表达式。 综合前人的研究成果,可将固液两相流中颗粒所受的力分为:粒间作用力、与流体-颗粒相对运动无关的力(包括惯性力、重力和压差力)、与流体-颗粒间相对运动有关的纵向力和侧向力(包括附加质量力、Basset力、升力、Magnus 力和Saffman力)以及与颗粒运动状态有关的相间阻力。本文根据球形颗粒在一维两相流中的受力分析,采用拉格朗日方法对非均匀颗粒的运动过程进行跟踪模拟,研究各种颗粒在两相流中的分选过程,并且对影响固相颗粒垂向分选的受力
《直线运动》知识要点 一、基本概念:时间、位移、速度、加速度 位移x ?——路程l 速度v ——平均速度与瞬时速度,速度与速率 加速度a ——t v a ??=??,物理意义 二、基本模型 质点 匀速直线运动 匀变速直线运动(自由落体运动、竖直抛体运动) 三、基本规律(模型草图) 1.匀速直线运动:vt x = 2.匀变速直线运动: at v v ±=0,202 1at t v x ±=,ax v v 2202±=-,220 t v v v v =+=,2aT x =? 3.t v -图象、t x -图象(点、线、面积、斜率、截距) 四、基本方法(过程草图) 比例法——相等时间、相等位移 逆向运动法——末速度为零的匀减速运动,其它 对称法——往返运动(竖直上抛运动) 平均速度法 逐差法 图象法 五、基本实验 打点计时器 纸带法测物体运动的时间、位移、速度(平均速度法)、加速度(图象法、逐差法) 六、难点题型 1.刹车问题——刹车时间 2.追击、相遇问题(草图、图象) (1)相遇问题——同一时刻、同一地点 (2)追击问题——关键:速度相等; 分析:速度相等前后; 结果:相距最近、最远,或能否追上。 *3.相对运动:相对参考系绝对v v v ???+= 七、易错点汇集 1.纸带处理:2naT x x m n m =-+,21234569)()(T x x x x x x a ++-++= 2.矢量性:减速运动或往返运动中,加速度为负值(一般规定出速度方向为正方向) 3.图象问题:用图象解决追击相遇问题 4.答题技巧:抓关键词,统一单位,字母区别 画过程草图,灵活选取公式——平均速度法
固液两相流的研究现状及进展 摘要:本文主要写了固液两相流泵在国内的研究现状以及分别从内特性、外特性两方面对国内固液两相流泵的研究进展进行分析。文中还给出了对固液两相流动中的最佳流动模式进行了探讨及固液两相流泵常用研究方法的分析。 关键词:固液两相流泵数学模型流动模式牛顿流体 1.固液两相流泵在国内的研究背景 我国对液固两相流泵的研究则始于20世纪70年代末80年代初,直到80年代中期以后按两相流理论设计的泵才逐步得到应用。经过几十年的努力,我国两相流泵技术也得到了长足的发展, 国内许多学者应用两相流理论对固液泵进行了水力设计和试验研究, 积累了许多很有价值的经验和数据, 为我国对液固两相流泵的研究开辟了广阔的道路。 2.国内固液两相流泵的研究现状 固液两相流泵的基本概念通常分为两类①杂质泵,包括泥浆泵、砂泵、挖泥泵等,主要用于冶金、矿山开采、电力、煤炭、水泥等行业抽送尾矿、精矿、灰渣、煤泥、水泥等,也可用于江、河、湖、海的挖泥和疏浚。离心式泵约占杂质泵总量的70% 左右,这类泵主要应考虑磨损问题。市场调查发现: 上海主流泵生产企业生产的离心式的固液两相流泵主要是渣浆泵。②无堵塞泵,包括旋流泵、单流道泵、多流道泵、螺旋离心泵和开式或半开式离心泵等,主要用于抽送污水、纸浆、纤维等,这类泵主要考虑的是堵塞问题。
由于固液两相流动的复杂性和特殊性,所以固液两相流泵在性能、噪声、寿命等方面存在着较大的缺陷。为了克服上述缺点,国内外学者先后通过理论分析,实验研究和数值模拟等方法深入研究固液两相流泵的流动机理,优化泵的设计来提高其效率和寿命,降低噪音。 3.固液两相流泵的研究理论 3.1外特性研究 20 世纪30 ~ 60 年代,国外学者研究固液相的性质与外特性关系得出的主要结论是: ①泵的扬程随着浓度的增加而下降; ②泵的 功率随着浓度的增大而增大; ③泵的效率随着浓度的增加而下降;④泵的最高效率点向着小流量区偏移。固液混合物的性质( 浓度、比重、粒径) 对离心泵性能方面的影响。固液混合物按固相比例分为高浓 度和低浓度。由于实际应用和实验大多数是在低浓度下,固体颗粒的质量分数上限为35% ,而对应的体积分数基本在15% 范围内,相当多的文献记载用CFD 方法分析过固相体积浓度为15% 范围内的渣浆 泵的流场。 3.2 内特性研究 固液两相流的内特性研究主要通过以下几个部分来进行: 3.2.1 叶轮内的运动规律 代表性的是B. K.苏波隆运用高速摄影技术研究固体颗粒在叶轮内部运动规律时得出的成果: ①叶道内固体颗粒运动轨迹的特点是: 小颗粒( 1 ~2mm) 大致沿着叶片的工作面运动,大颗粒( 8 ~10mm) 由于离心力作用,运动背离工作面; ②叶轮直径等于310mm,
国防科学技术大学 硕士学位论文 仿人机器人运动学和动力学分析 姓名:王建文 申请学位级别:硕士 专业:模式识别与智能系统 指导教师:马宏绪 20031101
能力;目前,ASIMO代表着仿人机器人研究的最高水平,见图卜2。2000年,索尼公司也推出了自己研制的仿人机器人SDR一3X,2002年又研制出了SDR一4X,见图卜3。日本东京大学也一直在进行仿人机器人的研究,与Kawada工学院合作相继研制成功了H5、H6和H7仿人机器人,其中H6机器人高1.37米,体重55公斤,具有35个自由度,目前正在开发名为Isamu的新一代仿人机器人,其身高1.5米,体重55公斤,具有32个自由度。日本科学技术振兴机构也在从事PINO机器人的研究,PINO高0.75米,采用29个电机驱动,见图卜4。日本Waseda大学一直在从事仿人机器人研究计划,研制的wL系列仿人机器人和WENDY机器人在机器人界有很大的影响,至今已投入100多万美元,仍在研究之中。Tohoku大学研制的Saika3机器人高1.27米,重47公斤,具有30个自由度。美国的MIT和剑桥马萨诸塞技术学院等单位也一直在从事仿人机器人研究。德国、英国和韩国等也有很多单位在进行类似的研究。 图卜1P2机器人图卜2ASIMO机器人图1.3SDR-4X机器人图1-4PINO机器人 图卜5第一代机器人图l-6第二代机器人图1.7第三代机器人图1—8第四代机器人 在国家“863”高技术计划和自然科学基金的资助下,国内也开展了仿人机器人的研究工作。目前,国内主要有国防科技大学、哈尔滨工业大学和北京理工大学等单位从事仿人机器人的研究。国防科技大学机器人实验室研制机器人已有10余年的历史,该实验室在这期间分四阶段推出了四代机器人,其中,2000年底推出的仿人机器入一“先行者”一是国内第一台仿人机器人。2003年6月,又成功研制了一台具有新型机械结构和运动特性的仿人机器人,这台机器人身高1.55米,体重63.5公斤,共有36个自由度,脚踝有力 第2页
运动学、静力学、动力学概念 运动学 运动学是理论力学的一个分支学科,它是运用几何学的方法来研究物体的运动,通常不考虑力和质量等因素的影响。至于物体的运动和力的关系,则是动力学的研究课题。 用几何方法描述物体的运动必须确定一个参照系,因此,单纯从运动学的观点看,对任何运动的描述都是相对的。这里,运动的相对性是指经典力学范畴内的,即在不同的参照系中时间和空间的量度相同,和参照系的运动无关。不过当物体的速度接近光速时,时间和空间的量度就同参照系有关了。这里的“运动”指机械运动,即物体位置的改变;所谓“从几何的角度”是指不涉及物体本身的物理性质(如质量等)和加在物体上的力。 运动学主要研究点和刚体的运动规律。点是指没有大小和质量、在空间占据一定位置的几何点。刚体是没有质量、不变形、但有一定形状、占据空间一定位置的形体。运动学包括点的运动学和刚体运动学两部分。掌握了这两类运动,才可能进一步研究变形体(弹性体、流体等)的运动。 在变形体研究中,须把物体中微团的刚性位移和应变分开。点的运动学研究点的运动方程、轨迹、位移、速度、加速度等运动特征,这些都随所选的参考系不同而异;而刚体运动学还要研究刚体本身的转动过程、角速度、角加速度等更复杂些的运动特征。刚体运动按运动的特性又可分为:刚体的平动、刚体定轴转动、刚体平面运动、刚体定点转动和刚体一般运动。 运动学为动力学、机械原理(机械学)提供理论基础,也包含有自然科学和工程技术很多学科所必需的基本知识。 运动学的发展历史 运动学在发展的初期,从属于动力学,随着动力学而发展。古代,人们通过对地面物体和天体运动的观察,逐渐形成了物体在空间中位置的变化和时间的概念。中国战国时期在《墨经》中已有关于运动和时间先后的描述。亚里士多德在《物理学》中讨论了落体运动和圆运动,已有了速度的概念。
关于实际弹簧振子运动特性的研究摘要:本文分析和研究了实际弹簧振子的运动特性,即在考虑弹簧振子自身的质量和在运动过程中遇到摩擦阻力等情况下,对其振动的性质、周期、振幅等特性的影响,并得出了定量的表达式,同时文中对弹簧振子运动时所具有的能量也作了比较全面的论述。这将为物理课程中该问题的教学提供了良好的参考作用。 关键词:弹簧;质量;摩擦力;系统能量等。 0 引言 在一般的物理书籍中,当述及到弹簧振子的特性时,为了讨论问题的方便,往往都是忽略了弹簧振子的质量和物体在运动时所受到的摩擦阻力的,但在实际问题中却往往不是这样,下面我们将对上述两个因素对弹簧振子运动特性的影响作系统的分析和研究,同时对平时较为少见的实际弹簧振子运动时所具有的能量问题也作了全面的论述。 1 实际弹簧振子的运动特性 在一般教学和研究中涉及弹簧振子时,通常都是指轻弹簧[1],即在这种理想条件下抽象出弹性集中于弹簧,质量集中于振子,没有运动阻力的理想弹簧振子模型。分析它的动力学特点,易知弹簧振子系统在运动中只受到回复力F=-kx的作用,简谐振动的固有周期公式T=2πm 。如果弹簧振子受到的摩擦力或弹簧质量不能忽略,那么这两种因素k 对弹簧振子的振动[2]到底会有什么影响呢?下面我们分别加以讨论。 1.1摩擦力对弹簧振子振动的影响 为简化该问题的讨论,我们不考虑弹簧质量对系统振动的影响,即忽略弹簧质量。设弹簧的倔强系数为k,振子与杆的滑动摩擦系数为μ,静摩擦系数为μ',弹簧振子的质量为m,x轴方向如图 弹簧振子在运动过程中所受摩擦力大小f=μmg,其方向与振子运动方向相反。如果我们用符号SignA表示某任意值A的正负号,则f=-μmg(Sign这样,当dx)dtdxdx>0时,f=-μmg;当<0时,f=μmg; dtdt dxdxd2x当≠O时,弹簧振子的运动方程为:-kx-μmg(Sign)=m dtdtdt2
结构动力特性的测试方法及应用(讲稿) 一. 概述 每个结构都有自己的动力特性,惯称自 振特性。了解结构的动力特性是进行结 构抗震设 计和结构损伤检测的重要步骤。目前,在 结构地震反应分析中,广泛采用振型叠加 原理的反应谱分析方法,但需要以确定结 构的动力特性为前提。n 个自由度的结构 体系的振动方程如下: [][][]{}{})()()()(. ..t p t y K t y C t y M =+??????+?????? 式中[]M 、[]C 、[]K 分别为结构的总体质量矩 阵、阻尼矩阵、刚度矩阵,均为n 维矩阵; {})(t p 为外部作用力的n 维随机过程列阵;{} )(t y 为位移响应的n 维随机过程列阵; {})(t y &为速度响应的n 维随机过程列阵; {})(t y &&为加速度响应的n 维随机过程列阵。 表征结构动力特性的主要参数是结 构的自振频率f (其倒数即自振周期T )、 振型Y(i)和阻尼比ξ,这些数值在结构动力 计算中经常用到。
任何结构都可看作是由刚度、质量、阻尼矩阵(统称结构参数)构成的动力学系统,结构一旦出现破损,结构参数也随之变化,从而导致系统频响函数和模态参数的改变,这种改变可视为结构破损发生的标志。这样,可利用结构破损前后的测试动态数据来诊断结构的破损,进而提出修复方案,现代发展起来的“结构破损诊断”技术就是这样一种方法。其最大优点是将导致结构振动的外界因素作为激励源,诊断过程不影响结构的正常使用,能方便地完成结构破损的在线监测与诊断。从传感器测试设备到相应的信号处理软件,振动模态测量方法已有几十年发展历史,积累了丰富的经验,振动模态测量在桥梁损伤检测领域的发展也很快。随着动态测试、信号处理、计算机辅助试验技术的提高,结构的振动信息可以在桥梁运营过程中利用环境激振来监测,并可得到比较精确的结构动态特性(如频响函数、模态参数等)。目前,许多国家在一些已建和在建桥梁上进行该方面有益的尝试。
SIMPACK车辆动力学习仿真系统 SIMPACK软件是德国INTEC Gmbh公司(于2009年正式更名为SIMPACK AG)开发的针对机械/机电系统运动学/动力学仿真分析的多体动力学分析软件包。它以多体系统计算动力学(Computational Dynamics of Multibody Systems)为基础,包含多个专业模块和专业领域的虚拟样机开发系统软件。SIMPACK软件的主要应用领域包括:汽车工业、铁路、航空/航天、国防工业、船舶、通用机械、发动机、生物运动与仿生等。 SIMPACK是机械系统运动学/动力学仿真分析软件。SIMPACK软件可以分析如:系统振动特性、受力、加速度,描述并预测复杂多体系统的运动学/动力学性能等。 SIMPACK的基本原理就是通过搭建CAD风格的模型(包括铰、力元素等)来建立机械系统的动力学方程,并通过先进的解算器来获取系统的动力学响应。 SIMPACK软件可以用来仿真任何虚拟的机械/机电系统,从仅仅只有几个自由度的简单系统到诸如一个庞大的火车。SIMPACK软件可以应用在我们产品设计、研发或优化的任何阶段。 SIMPACK软件独具有的全代码输出功能可以将我们的模型输出成Fortran或C代码,从而可以实现与任意仿真软件的联合。 车辆动力学仿真carsim CarSim是专门针对车辆动力学的仿真软件,CarSim模型在计算机上运行的速度比实时快3-6倍,可以仿真车辆对驾驶员,路面及空气动力学输入的响应,主要用来预测和仿真汽车整车的操纵稳定性、制动性、平顺性、动力性和经济性,同时被广泛地应用于现代汽车控制系统的开发。CarSim可以方便灵活的定义试验环境和试验过程,详细的定义整车各系统的特性参数和特性文件。 CarSim软件的主要功能如下: 适用于以下车型的建模仿真:轿车、轻型货车、轻型多用途运输车及SUV; 可分析车辆的动力性、燃油经济性、操纵稳定性、制动性及平顺性; 可以通过软件如MATLAB,Excel等进行绘图和分析; 可以图形曲线及三维动画形式观察仿真的结果;包括图形化数据管理界面,车辆模型求解器,绘图工具,三维动画回放工具,功率谱分析模块;程序稳定可靠; CarSim软件可以扩展为CarSim RT, CarSim RT 是实时车辆模型,提供与一些硬件实时系统的接口,可联合进行HIL仿真;
ADAMS软件在汽车前悬架-转向系统 运动学及动力学分析中的应用 尤瑞金 北京吉普汽车有限公司 摘要:本文介绍利用国际上著名的ADAMS软件对工程上多刚体系统进行运动学和动力学分析的 方法,并用这一方法模拟了某货车悬架-转向系统的运动学及动力学特性,研究开发了前、后处理专 用程序,使该软件适用于车辆系 统,并得出了许多具有工程意义的结果。 主题词:汽车总布置-计算机辅助设计县架转向系 一、前言 汽车悬架和转向的动学及动力学分析是汽车总布置设计、运动校核的重要内容之一, 也是研究平顺性、操纵稳定性等汽车性能的基础。由于汽车前悬架一转向系统是比较复杂的空间机构,特别是前独立悬架,一般多设计成主销内倾和后倾,并且控制臂轴也大多倾斜布置。这些就给运动学、动力学分析带来较大困难。过去多用简化条件下的图解法一般的分析计算法进行分析计算。所得的结果误差较大,并且费时费力。近年来,随着计算机技术和计算方法的不断提高,国外研制了IMP、ADAMS及DAMN等很多专用程序,用于车辆运动学及 动力学分析。 本文是在消化吸收引进的ADAMS软件过程中,结合汽车设计,解决运动学及动力学问题,从而提高设计质量。 二、ADAMS软件概述 ADAMS(Automatic Dynamic Analysis of Mechanical Systems,即机械系统动力学自动化分析软件包)是由美国机械动力公司开发的。由于该软件采用的比较先进的计算方法,大大地缩短了计算时间,其精确度也相当高,因上,被广泛应用于机械设计的各个领域。 1.ADAMS软件功能如下: 一般ADAMS分析功能如下: (1)可有效地分析三维机构的运动与力。例如可以利用ADAMS来模拟作用在轮胎上的垂直、转向、陀螺效应、牵引与制动、力与力矩;还可应用ADAMS进行整个车辆或悬架系统道路操纵性的研究。 (2)利用ADAMS可模拟大位移的系统。ADAMS很容易处理这种模型的非线性方程, 而且可进行线性近似。 (3)可分析运动学静定(对于非完整的束或速度约束一般情况的零自由度)系统。 (4)对于一个或多外自由度机构,ADAMS可完成某一时间上的静力学分析或某一时 间间隔内的静力学分析。
第三章流体运动学与动力学基础 主要内容 ●基本概念 ●欧拉运动微分方程 ●连续性方程——质量守恒* ●伯努利方程——能量守恒** 重点 ●动量方程——动量守恒** 难点 ●方程的应用 第一节研究流体运动的两种方法 ●流体质点:物理点。是构成连续介质的流体的基本单位,宏观上无穷小(体积非常 微小,其几何尺寸可忽略),微观上无穷大(包含许许多多的流体分子,体现了许 多流体分子的统计学特性)。 ●空间点:几何点,表示空间位置。 流体质点是流体的组成部分,在运动时,一个质点在某一瞬时占据一定的空间点(x,y,z)上,具有一定的速度、压力、密度、温度等标志其状态的运动参数。拉格朗日法以流体质点为研究对象,而欧拉法以空间点为研究对象。 一、拉格朗日法(跟踪法、质点法)Lagrangian method 1、定义:以运动着的流体质点为研究对象,跟踪观察个别流体质点在不同时间其位置、流速和压力的变化规律,然后把足够的流体质点综合起来获得整个流场的运动规律。 2、拉格朗日变数:取t=t0时,以每个质点的空间坐标位置为(a,b,c)作为区别该质点的标识,称为拉格朗日变数。 3、方程:设任意时刻t,质点坐标为(x,y,z) ,则: x = x(a,b,c,t) y = y(a,b,c,t) z = z(a,b,c,t) 4、适用情况:流体的振动和波动问题。 5、优点:可以描述各个质点在不同时间参量变化,研究流体运动轨迹上各流动参量的变化。 缺点:不便于研究整个流场的特性。 二、欧拉法(站岗法、流场法)Eulerian method
1、定义:以流场内的空间点为研究对象,研究质点经过空间点时运动参数随时间的变化规律,把足够多的空间点综合起来得出整个流场的运动规律。 2、欧拉变数:空间坐标(x ,y ,z )称为欧拉变数。 3、方程:因为欧拉法是描写流场内不同位置的质点的流动参量随时间的变化,则流动参量应是空间坐标和时间的函数。 位置: x = x(x,y,z,t) y = y(x,y,z,t) z = z(x,y,z,t) 速度: u x =u x (x,y,z,t ) u y =u y (x,y,z,t ) u z =u z (x,y,z,t ) 同理: p =p (x,y,z,t ) ,ρ=ρ(x,y,z,t) 说明: x 、y 、z 也是时间t 的函数。 加速度: z u u y u u x u u t u a x z x y x x x x ??+??+??+??= z u u y u u x u u t u a y z y y y x y y ??+??+??+??= z u u y u u x u u t u a z z z y z x z z ??+??+??+??= 全加速度=当地加速度+迁移加速度 当地加速度:在一定位置上,流体质点速度随时间的变化率。 迁移加速度:流体质点所在的空间位置的变化而引起的速度变化率。 说明:两种方法具有互换性。但由于欧拉法较简单,且本书着重讨论流场的整体运动特性。所以,采用欧拉法研究问题。 四、流场分类 1、 三元流场:凡具有三个坐标自变量的流场称为三元流场(或三维流场)。 一般来说,速度是三个坐标自变量的函数:V =V (x,y,z,t) 2、二元流场:凡具有两个坐标自变量的流场。 3、一元流场:具有一个坐标自变量的流场。 管截面A=A(l ),若人们研究的是各截面上流动的平均物理参数,则它可以简化为一元流场B=B(l , t)。 k y x j xy i xy u 542 1221+-=——二维流场
可逆摆运动特性的研究 刘勇(安庆师范学院物理与电气工程学院 安徽 安庆 246011) 指导老师:张 杰 摘要:本文根据可逆摆的物理图象和运动学方程,建立了可逆摆的目标函数和控制数学模型。通过对目标函数控制物理机理的研究,寻找目标函数的极值,然后利用MATLAB 的Simulink 进行了可逆摆的运动学仿真。在仿真过程中我们应用全维状态观测设计控制器实现了状态反馈,在此基础上用状态反馈控制配置系统极点,能够在最短的时间内寻找到系统的平衡位置。仿真结果表明,该方法可使系统稳定工作并具有良好的动态性能,并能较好地解释可逆摆实验中一系列物理现象。这为我们提供了一种利用状态反馈进行控制系统优化的手段。 关键词:可逆摆,状态反馈,MATLAB ,自动控制,仿真 1.引言 北京大学赵凯华教授指出[1]:“物理学家对事物是最好穷本极源的,他们在研究的过程中不段地思考,凡事总喜欢问个‘为什么’。理论物理学家不能仅仅埋首于公式的推演,应该询问其物理实质,从中构想出鲜明的无论图象来;实验物理学家不应满足于现象和数据的记录,或某种先进的指标,而要追究其中的物理机理”。 可逆摆问题在控制理论的研究中是一个很典型的范例[2-3]。本文根据可逆摆运动学方程,建立可逆摆目标函数的物理图象,分析(L-x )图象的形成机理,研究可逆摆上的大锤对目标函数控制的物理机理,从而较好地解释了可逆摆实验中一系列物理现象。 2.可逆摆原理及运动方程 2.1可逆摆的振动周期 在大学实验教材中,可逆摆是一种可倒过来摆动的物理摆[4],实验原理如图1,它是均匀钢体C 上装有2个均匀且平整的钢盘A 和B ,杆C 穿过钢盘,且穿过盘心。O 1,O 2为杆C 的两刀口,当可逆摆正挂做摆角很小的摆动时,它做简谐振动,其周期为 Mga I T 1 12π = (1) 式中I 1为摆在此时的转动惯量,M 为摆的总质量,a 为刀口O 1到质心O 的 距离。为了消去难于测量I 1与a ,需保持整个摆的结构不变而仅将摆倒过来绕O 2(称作倒摆)摆动则其周期为 Mgb I T 2 22π = (2) 式中I 2为摆此时的转动惯量,b 为刀口O 2到摆质心O 的距离,两者也难于侧准,为了消去I 1,I 2,a ,b ,再用平行轴定理 2 01Ma I I += ( 3 ) 2 02Mb I I += (4) 则由(1)、(2)、(3)、(4)可得 图1可逆摆
目录 摘要........................................................................................................................................... I ABSTRACT.............................................................................................................................. II 目录 ........................................................................................................................................... I II 第一章绪论 .. (1) 1.1 论文研究的背景和意义 (1) 1.2 国内外研究现状 (2) 1.2.1足踝生物力学研究现状 (2) 1.2.2 国内外步态模拟机研究现况 (3) 1.3 论文主要研究内容 (7) 第二章步态分析以及足踝步态模拟机的设计 (9) 2.1 引言 (9) 2.2 步态分析的研究 (9) 2.2.1 步态的流程 (9) 2.2.2 步态的周期性 (11) 2.2.3 步态中运动学测量分析 (12) 2.2.4 步态中足底动力学的测量分析 (14) 2.2.5 步态分析在临床上的应用 (16) 2.3 模拟机的系统功能设计 (17) 2.4 模拟机的机构设计 (17) 2.5 足部骨骼的三维建模 (19) 2.5.1 足踝的骨骼 (19) 2.5.2 足踝的关节 (20) 2.5.3 足踝的韧带 (21) 2.5.4 足踝的跟腱 (21) 2.5.4 足踝MRI断层扫描 (21) 2.5.5模型重建过程 (23) 2.6 本章小结 (27)