实验一开环直流调速系统的仿真
一、实验目的
1、熟悉并掌握利用 MATLAB中 Simulink 建立直流调速系统的仿真模型和进行仿真实验的方法。
2、掌握开环直流调速系统的原理及仿真方法。
二、实验内容
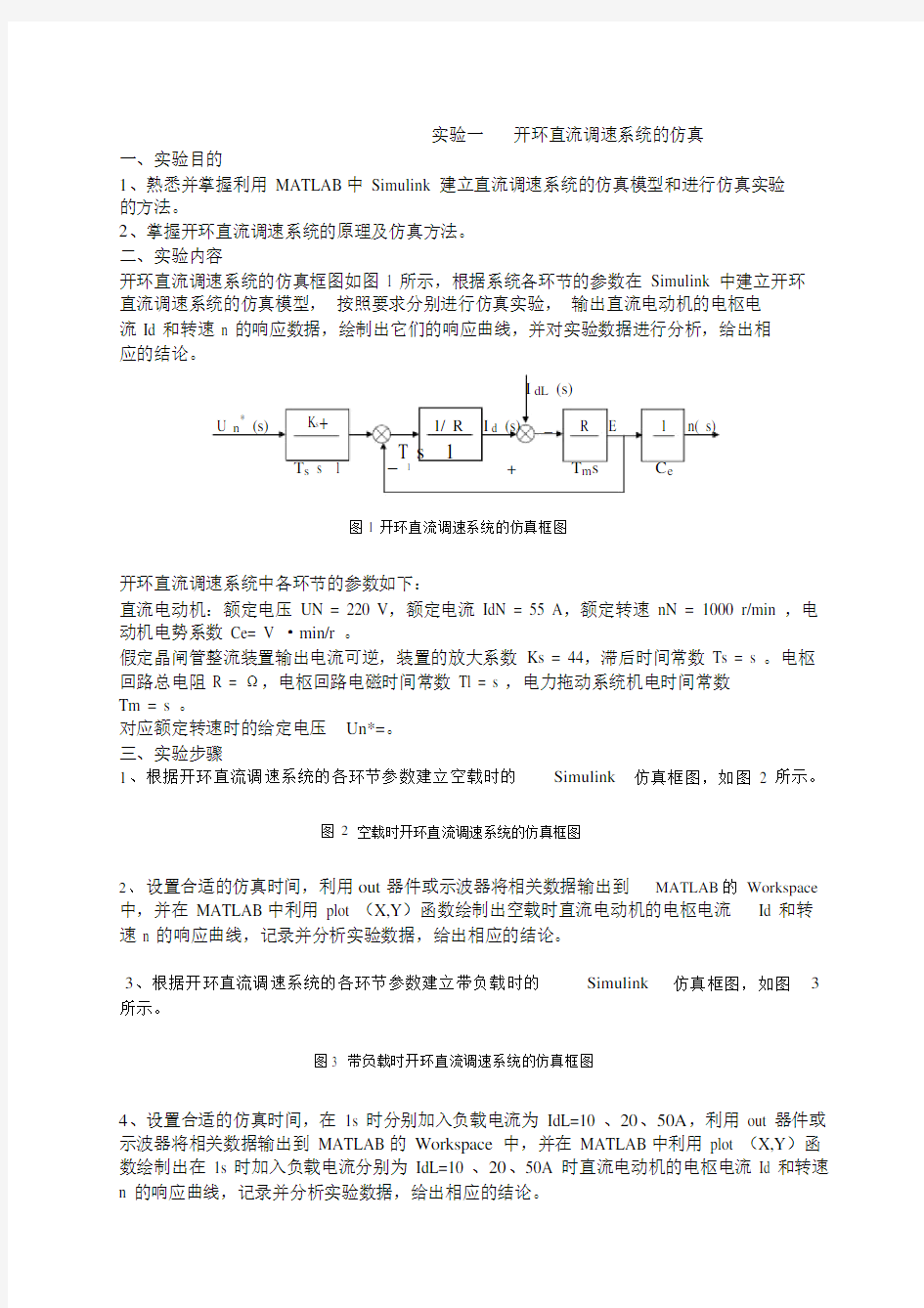
开环直流调速系统的仿真框图如图 1 所示,根据系统各环节的参数在 Simulink 中建立开环直流调速系统的仿真模型,按照要求分别进行仿真实验,输出直流电动机的电枢电
流Id 和转速 n 的响应数据,绘制出它们的响应曲线,并对实验数据进行分析,给出相
应的结论。
I dL (s)
U n* (s)K s+1/ R I d (s)_R E 1 n( s)
T s s 1—T
l
s 1
+T m s C e
图 1 开环直流调速系统的仿真框图
开环直流调速系统中各环节的参数如下:
直流电动机:额定电压 UN = 220 V,额定电流 IdN = 55 A,额定转速 nN = 1000 r/min ,电动机电势系数 Ce= V ·min/r 。
假定晶闸管整流装置输出电流可逆,装置的放大系数 Ks = 44,滞后时间常数 Ts = s 。电枢回路总电阻 R = Ω,电枢回路电磁时间常数 Tl = s ,电力拖动系统机电时间常数
Tm = s 。
对应额定转速时的给定电压Un*=。
三、实验步骤
1、根据开环直流调速系统的各环节参数建立空载时的Simulink仿真框图,如图2 所示。
图2空载时开环直流调速系统的仿真框图
2、设置合适的仿真时间,利用out器件或示波器将相关数据输出到MATLAB的 Workspace 中,并在 MATLAB中利用 plot (X,Y)函数绘制出空载时直流电动机的电枢电流Id 和转速 n 的响应曲线,记录并分析实验数据,给出相应的结论。
3、根据开环直流调速系统的各环节参数建立带负载时的Simulink仿真框图,如图3所示。
图 3 带负载时开环直流调速系统的仿真框图
4、设置合适的仿真时间,在 1s 时分别加入负载电流为 IdL=10 、20、50A,利用 out 器件或示波器将相关数据输出到 MATLAB的 Workspace 中,并在 MATLAB中利用 plot (X,Y)函数绘制出在 1s 时加入负载电流分别为 IdL=10 、20、50A 时直流电动机的电枢电流 Id 和转速n 的响应曲线,记录并分析实验数据,给出相应的结论。
5、设置合适的仿真时间,在 1s 时分别加入负载电流为 IdL=20A,修改给定电压 Un*的值
(取 3 组不同的值),利用 out 器件或示波器将相关数据输出到 MATLAB的 Workspace 中,并在 MATLAB中利用 plot (X,Y)函数绘制出在 1s 时加入负载电流分别为 IdL=20A 时直流
电动机的电枢电流 Id 和转速 n 的响应曲线,记录并分析实验数据,给出相应的结论。(证明开环时转速降落只与负载电流有关,而与给定电压无关。)
四、数据分析
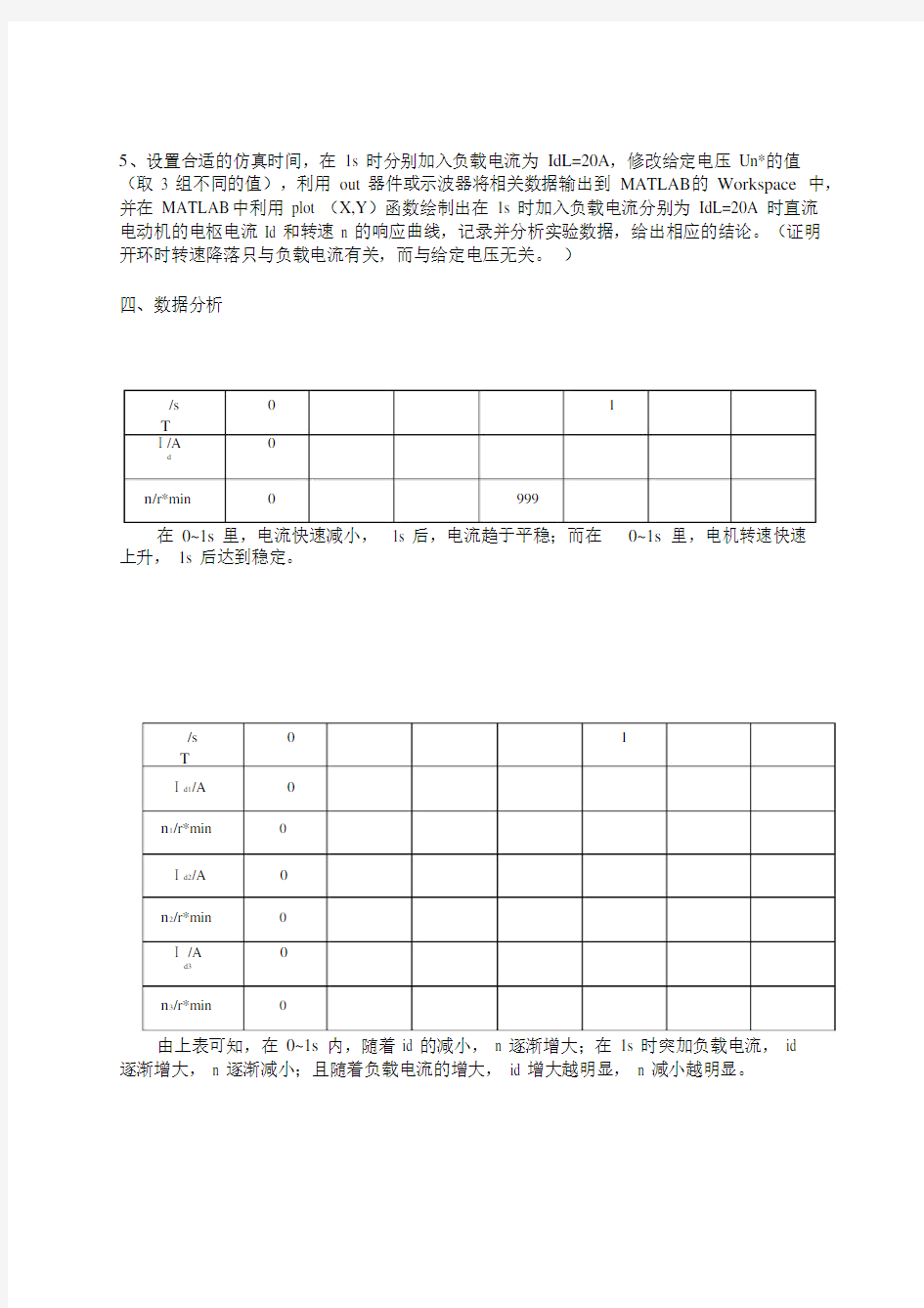
/s01
T
I /A0
d
n/r*min0999
在 0~1s 里,电流快速减小, 1s 后,电流趋于平稳;而在0~1s 里,电机转速快速
上升, 1s 后达到稳定。
/s01
T
I d1/A0
n1/r*min0
I d2/A0
n2/r*min0
I /A0
d3
n3/r*min0
由上表可知,在 0~1s 内,随着 id 的减小, n 逐渐增大;在 1s 时突加负载电流, id
逐渐增大, n 逐渐减小;且随着负载电流的增大, id 增大越明显, n 减小越明显。
T/s01
I d1/A0
n1/r*min02194
I d2/A0
n2/r*min01675
I d3/A0
n /r*min04486 3
对上表分析,随着给定电压的升高,电枢电流在0~1s 所达到的峰值也随着提高,在1s 时加入 20A 固定负载电流后,电枢电流上升的幅度基本相同;电机转速跟电枢电流变化基本相似。
在 Un*分别为 10V、15V、20V 时,转速降落分别为
n1==(r/min)
n2=可以看出n1≈Δ n2≈Δ n3,因此可证明转速降落于给定电压Un*无关。
交流调速系统概述 1.1、交流调速系统的特点 对于可调速的电力拖动系统,工程上往往把它分为直流调速系统和交流调速系统两类,这主要是根据采用什么电流制型式的电动机来进行电能与机械能的转换而划分的。所谓交流调速系统,就是以交流电动机作为电能—机械能的转换装置,并对其进行控制以产生所需要的转速。相比于直流电动机,交流电动机具有结构简单,制造成本低,坚固耐用,运行可靠,维护方便,惯性小,动态响应好,以及易于向高压、高速和大功率方向发展等优点。 随着电力电子技术,大规模集成电路和计算机控制技术的迅速发展,交流可调传动得到了广泛的发展,诸如交流电动机的串级调速、各种类型的变频调速,特别是矢量控制技术的应用,使得交流调速系统逐步具备了宽的调速范围、较高的稳速精度、快速的动态响应以及在四象限作可逆运行等良好的技术性能。现在从数百瓦的伺服系统到数百千瓦的特大功率高速传动系统,从一般要求的小范围调速传动到高精度、快响应、大范围的调速传动,从单机传动到多机协调运转,已几乎都可采用交流调速传动。 1.2交流调速系统的应用 由于交流调速系统的优越性,其已经普遍应用于现代工业中,主要由以下几个方面:(1)、风机、水泵、压缩机耗能占工业用电的40%,进行变频、串级调速,可以节能。 (2)、对电梯等垂直升降装置调速实现无级调速,运行平稳、档次提高。 (3)、纺织、造纸、印刷、烟草等各种生产机械,采用交流无级变速,提高产品的质量和效率。 (4)、钢铁企业在轧钢、输料、通风等多种电气传动设备上使用交流变频传动。 (5)、有色冶金行业如冶炼厂对回转炉、培烧炉、球磨机、给料等进行变频无级调速控制。 (6)、油田利用变频器拖动输油泵控制输油管线输油。此外,在炼油行业变频器还被应用于锅炉引风、送风、输煤等控制系统。 (7)、变频器用于供水企业、高层建筑的恒压供水。 (8)、变频器在食品、饮料、包装生产线上被广泛使用,提高调速性能和产品质量。 (9)、变频器在建材、陶瓷行业也获得大量应用。如水泥厂的回转窑、给料机、风机均可采用交流无级变速。 (10)、机械行业是企业最多、分布最广的基础行业。从电线电缆的制造到数控机床的制造。电线电缆的拉制需要大量的交流调速系统。一台高档数控机床上就需要多台交流调速甚至精确定位传动系统,主轴一般采用变频器调速(只调节转速)或交流伺服主轴系统(既无级变速又使刀具准确定位停止),各伺服轴均使用交流伺服系统,各轴联动完成指定坐标位置移动。
仿真设计报告
转速、电流双闭环直流调速系统的Simulink仿真设计 一、系统设计目的 直流调速系统具有调速范围广、精度高、动态性能好和易于控制等优点,所以在电气传动中获得了广泛应用。根据直流电动机的工作原理建立了双闭环直流调速系统的数学模型,并详细分析了系统的原理及其静态和动态性能。按照自动控制原理,对双闭环调速系统的设计参数进行分析和计算,利用Simulink对系统进行了各种参数给定下的仿真,通过仿真获得了参数整定的依据。在理论分析和仿真研究的基础上,设计了一套实验用双闭环直流调速系统。对系统的性能指标进行了实验测试,表明所设计的双闭环调速系统运行稳定可靠,具有较好的静态和动态性能,达到了设计要求。采用MATLAB 软件中的控制工具箱对直流电动机双闭环调速系统进行计算机辅助设计,并用SIMULINK进行动态数字仿真,同时查看仿真波形,以此验证设计的调速系统是否可行。 二、系统理论分析 2.1双闭环直流调速系统工作原理 电动机在启动阶段,电动机的实际转速低于给定值,速度调节器的输入端偏差信号,经放大后输出的电压保持为限幅值,速度调节器工作在开环状态,速度调节器的输出电压作为电流给定值送入电流调节器,此时以最大电流给定值使电流调节器输出移相信号直流电压迅速上升,电流也随即增大直到最大给定值,电动机以最大电流恒流加速启动。电动机的最大电流可通过整定速度调节器的输出限幅值来改变。在转速上升到给定转速后,速度调节器输入端的偏差信号减小到近于零,速度调节器和电流调节器退出饱和状态,闭环调节开始起作用。对负载引起的转速波动,速度调节器输入端偏差信号将随时通过速度调节器、电流调节器修正触发器的移相电压,使整流桥输出的直流电压相应变化校正和补偿电动机的转速偏差。另外电流调节器的小时间常数,还能对因电网波动引起的电枢电流的变化进行快速调节,可在电动机转速还未来得及发生改变时,迅速使电流恢
长安大学交流调速课程设计
一.摘要 变频调速是一种新兴的技术,将变频调速技术用于供水控制系统中,具有高效节能、水压恒定等优点。随着社会经济的发展,绿色、节能、环保已成为社会建设的主题。对于一个城市的建设,供水系统的建设是其中重要的一部分,供水的可靠性、稳定性、经济性直接影响到居民的生活质量。近年来,随着自动化技术、控制技术的发展,以及这些技术在供水系统的应用,高性能、高节能的变频恒压控制的供水系统已成为现在城市供水管理的必然趋势。本次课程设计采用CPM1A PLC控制器结合富士变频器控制两台水泵的各种转换,实现变频恒压供水系统的功能,并且实现故障转换与报警等保护功能,使得系统控制可靠,操作方便。 二.设计要求 一楼宇供水系统,正常供水量为30m3/小时,最大供水量40m3/小时,扬程24米。采用变频调速技术组成一闭环调节系统,控制水泵的运行,保证用户水压恒定。当用水量增大或减小时,水泵电动机速度发生变化,改变流量,以保证水压恒定。 要求设计实现: ⑴设二台水泵。一台工作,一台备用。正常工作时,始终由一台水 泵供水。当工作泵出现故障时,备用泵自投。 ⑵二台泵可以互换。 ⑶给定压力可调。压力控制点设在水泵出口处。
⑷具有自动、手动工作方式,各种保护、报警装置。采用OMRON CPM1A PLC、富士变频器完成设计。 三.方案的论证分析 传统的小区供水方式有: ⑴恒速泵加压供水方式 该方式无法对供水管网的压力做出及时的反应,水泵的增减都依赖人工进行手工操作,自动化程度低,而且为保证供水,机组常处于满负荷运行,不但效率低、耗电量大,而且在用水量较少时,管网长期处于超压运行状态,爆损现象严重,电机硬起动易产生水锤效应,目前较少采用。 ⑵气压罐供水方式 气压罐供水具有体积小、技术简单、不受高度限制等特点,但此方式调节量小、水泵电机为硬起动且起动频繁,对电器设备要求较高、系统维护工作量大,而且为减少水泵起动次数,停泵压力往往比较高,致使水泵在低效段工作,也使浪费加大,从而限制了其发展。 ⑶水塔高位水箱供水方式 水塔高位水箱供水具有控制方式简单、运行经济合理、短时间维修或停电可不停水等优点,但存在基建投资大,占地面积大,维护不方便,水泵电机为硬起动,启动电流大等缺点,频繁起动易损坏联轴器,目前主要应用于高层建筑。 综上所述,传统的供水方式普遍不同程度的存在浪费水力、
基于单片机转差频率控制的交流调速系统设计 摘要 单片机控制的变频调速系统设计思想是用转差频率进行控制。通过改变程序来达到控制转速的目的。由于设计中电动机功率不大,所以整流器采用不可控电路,电容器滤波;逆变器采用电力晶体管三相逆变器。系统的总体结构主要由主回路,驱动电路,光电隔离电路,SA8282大规模集成电路,保护电路,AT89C51单片机, 8255可编程接口芯片,I/O接口芯片,测速发电机等组成。回路中有了检测保护电路就可以使整个系统运行的可靠性有了保障。 关键词:AT89C51单片机;SA8282;转差频率;交流调速;三相异步电动机
目录 前言 (1) 第1章交流调速系统的概述 (4) 1.1交流调速的基本原理 (4) 1.2 交流调速的特点 (5) 第2章交流调速系统的硬件设计 (7) 2. 1 转差频率控制原理: (7) 2. 2 系统设计的参数 (7) 2.3 用单片机控制的电机交流调速系统设计 (7) 2.3.1调速系统总体方案设计 (7) 2.3.2 元器件的选用 (9) 2.3.3 系统主回路的设计以及参数计算 (12) 2.3.4 SPWM控制信号的产生 (15) 2.3.5 光电隔离及驱动电路设计 (17) 2.3.6 故障检测及保护电路设计 (18) 2.3.7 模拟量输入通道的设计 (18) 第3章系统软件的设计 (19) 3.1 主程序的设计 (19) 3.2 转速调节程序 (19) 3.3 增量式PI运算子程序 (20) 3.4故障处理程序 (21) 3.5 部分子程序 (22) 3.5.1 AD0809的编程 (22) 3.5.2 8255的编程 (23) 结论 (23) 参考文献 (23)
TG n ASR ACR U *n + - U n U i U * i + - U c TA V M + - U d I d UP L - M T 双闭环直流调速系统的设计与仿真 1、实验目的 1.熟悉晶闸管直流调速系统的组成及其基本原理。 2.掌握晶闸管直流调速系统参数及反馈环节测定方法。 3.掌握调节器的工程设计及仿真方法。 2、实验内容 1.调节器的工程设计 2.仿真模型建立 3.系统仿真分析 3、实验要求 用电机参数建立相应仿真模型进行仿真 4、双闭环直流调速系统组成及工作原理 晶闸管直流调速系统由三相调压器,晶闸管整流调速装置,平波电抗器,电动机—发电机组等组成。 本实验中,整流装置的主电路为三相桥式电路,控制回路可直接由给定电压U ct 作为触发器的移相控制电压,改变U ct 的大小即可改变控制角,从而获得可调的直流电压和转速,以满足实验要求。 为了实现转速和电流两种负反馈分别起作用,可在系统中设置两个调节器,分别调节转速和电流,即分别引入转速负反馈和电流负反馈,二者之间实行嵌套联接,如图 4.1。把转速调节器的输出当作电流调节器的输入,再用电流的输出去控制电力电子变换器UPE 。在结构上,电流环作为内环,转速环作为外环,形成了转速、电流双闭环调速系统。为了获得良好的静、动态特性,转速和电流两个调节器采用PI 调节器。 图4.1 转速、电流双闭环调速系统 5、电机参数及设计要求 5.1电机参数 直流电动机:220V ,136A ,1460r/min ,C e =0.192V ? min/r ,允许过载倍数=1.5,晶闸管装置放大系数:K s =40 电枢回路总电阻:R=0.5 时间常数:T l =0.00167s, T m =0.075s 电流反馈系数:β=0.05V/A
东北大学秦皇岛分校控制工程学院自动控制系统课程设计 设计题目:直流电动机开环调速系统 设计与仿真 专业名称自动化 班级学号 学生姓名 指导教师 设计时间2015.7.13~2014.7.24 成绩
目录 1.设计任务书 (3) 2.概述 (4) 2.1前言 (4) 2.2 系统原理 (4) 2.3 simulink框图 (5) 3.元件参数设置 (7) 3.1三相交流电压源设置 (7) 3.2.同步六脉冲触发器 (7) 3.3.三相全控桥整流电路 (8) 3.4.直流电动机设计 (8) 4.仿真结果分析 (9) α=时 (12) 4.2 当30o α=时 (14) 4.3 当60o α=时 (17) 4.4 当90o 4.5励磁电流 (19) 5.结论 (20) 6.参考文献 (22) 7.结束语 (22)
东北大学秦皇岛分校控制工程学院 《自动控制系统》课程设计任务书 专业自动化班级姓名 设计题目:直流电动机开环调速系统设计与仿真 一、设计实验条件 地点:实验室 实验设备:PC机 二、设计任务 直流电动机的额定数据为220V,136A,1460r/min,4极, R=0.21 , a 22 GD=22.5N m;励磁电压为220V,励磁电流为1.5A。采用三相桥式全控整流电路。平波电抗器 L=200mH。 p 设计要求:设计并仿真该晶闸管-电动机(V-M)开环调速系统。观察电动机在全压起动和起动后加额定负载时电动机的转速、转矩和电流变化。 三、设计说明书的内容 1、设计题目与设计任务(设计任务书) 2、前言(绪论)(设计的目的、意义等) 3、主体设计部分 4、参考文献 5、结束语 四、设计时间与设计时间安排 1、设计时间:7月13日~7月24日 2、设计时间安排: 熟悉课题、收集资料:3天(7月13日~7月15日) 具体设计(含上机实验):6天(7月16日~7月21日) 编写课程设计说明书:2天(7月22日~7月23日) 答辩:1天(7月24日)
《交直流调速系统》课程设计 一、性质和目的 自动化专业、电气工程及其自动化专业的专业课,在学完本课程理论部分之后,通过课程设计使学生巩固本课程所学的理论知识,提高学生的综合运用所学知识,获取工程设计技能的能力;综合计算及编写报告的能力。 二、设计内容 1.根据指导教师所下达的《课程设计任务书》课程设计。 2.主要内容包括: (1)根据任务书要求确定总体设计方案 (2)主电路设计:主电路结构设计(结构选择、器件选型、考虑器件的保护)、变压器的选型设计; (3)控制回路设计:控制方案的选择、控制器设计 (4)保护电路的选择和设计 (5)调速系统的设计原理图,调速性能分析、调速特点 3.编写详细的课程设计说明书一份。 三、设计内容与要求 1.熟练掌握主电路结构选择方法、主电路元器件的选型计算方法。 2.熟练掌握保护方式的配置及其整定计算。 3.掌握触发控制电路的设计选型方法。。 4.掌握速度调节器、电流调节器的典型设计方法。 5.掌握绘制系统电路图绘制方法。 6.掌握说明书的书写方法。 四、对设计成品的要求 1.图纸的要求: 1)图纸要符合国家电气工程制图标准; 2)图纸大小规格化(例如:1#图,2#图); 3)布局合理、美观。 2.对设计说明书的要求 1)说明书中应包括如下内容
①目录 ②课题设计任务书; ③调速方案的论证分析(至少有两种方案,从经济性能和技术性能方面进行分析论证)和选择; ④所要完成的设计内容 ⑤变压器的接线方式确定和选型; ⑥主电路元器件的选型计算过程及结果; ⑦控制电路、保护电路的选型和设计; ⑧调速系统的总结线图 系统电路设计及结果。 2)说明书的书写要求 ①文字简明扼要,理论正确,程序功能完备,框图清楚明了。 ②字迹工整;书写整齐,使用统一规定的说明书用纸。 ③图和表格不能徒手绘制。 ④附参考资料说明。
中南大学 《工程训练》 ——设计报告 设计题目:异步电机变频调速 指引教师:黎群辉 设计人:冯露 学号: 专业班级:自动化0906班 设计日期:9月
交流异步电动机变频调速系统设计 摘要 近年来,交流电机变频调速及其有关技术研究己成为当代电气传动领域一种重要课题,并且随着新电力电子器件和微解决器推出以及交流电机控制理论发展,交流变频调速技术还将会获得巨大进步。 本文对变频调速理论,逆变技术,SPWM产生原理进行了研究,在此基本上设计了一种新型数字化三相SPWM变频调速系统,以8051控制专用集成芯片 SA4828为控制核心,采用IGBT作为主功率器件,同步采用EXB840构成IGBT驱动电路,整流电路采用二极管,可使功率因数接近1,并且只用一级可控功率环节,电路构造比较简朴。 V控制,同步,软件程序使得参数输入和变频器运营方式变本文在控制上采用恒 f 化极为以便,新型集成元件采用也使得它开发周期短。 此外,本文对SA4828三相SPWM波发生器使用和编程进行了详细简介,完毕了整个系统控制某些软硬件设计。 V控制,SA4828波形发生器 核心字:变频调速,正弦脉宽调制, f
目录 摘要................................................ 错误!未定义书签。 1.1 研究目与意义 (1) 1.2本次设计方案简介 (2) 1.2.1 变频器主电路方案选定 (2) 1.2.2 系统原理框图及各某些简介 (3) 1.2.3 选用电动机原始参数 (4) 2交流异步电动机变频调速原理及办法 (5) 2.1 异步电机变频调速原理 (5) 2.2 变频调速控制方式及选定 (6) V比恒定控制 (6) 2.2.1 f 2.2.2 其他控制方式................................ 错误!未定义书签。3变频器主电路设计. (13) 3.1 主电路工作原理 (13) 3.2 主电路各某些设计 (13) 3.3. 采用EXB840IGBT驱动电路 (15) 4控制回路设计 (16) 4.1 驱动电路设计 (16) 4.2 保护电路......................................... 错误!未定义书签。 4.2.1 过、欠压保护电路设计........................ 错误!未定义书签。 4.2.2 过流保护设计................................ 错误!未定义书签。 4.3 控制系统实现 (19) 5变频器软件设计....................................... 错误!未定义书签。 5.1 流程图 (22)
实验四 直流调速系统仿真与设计 一、 实验目的 1、掌握连续部分的程序实现方法; 2、熟悉仿真程序的编写方法。 二、 实验容 一转速、电流双闭环控制的H 型双极式PWM 直流调速系统,已知电动机参数为:N P =200W ,N U =48V ,N I =4A ,额定转速 500r/min ,电枢电阻Ra=6.5欧,电枢回路总电阻R=8欧,允许电流过载倍数2λ=,电势系数C 0.12min/e V r =?,电磁时间常数s T l 015.0=,机电时间常数s T m 2.0=,电流反馈滤波时间常数 s T oi 001.0=,转速反馈滤波时间常数s T on 005.0=。设调节器输入输出电压** nm im cm U U U 10V ===,调节器输入电阻Ω=k R 400。已计算出电力晶体管D202 的开关频率f 1kHz =,PWM 环节的放大倍数s K 4.8 =。 试对该系统进行动态参数设计,设计指标:稳态无静差,电流超调量i 5%σ≤;空载 起动到额定转速时的转速超调量n 20%σ≤;过渡过程时间s t 0.1s ≤。 建立系统的仿真模型,并进行仿真验证。 一、 设计计算 1. 稳态参数计算 根据两调节器都选用PI 调节器的结构,稳态时电流和转速偏差均应为零;两调 节器的输出限幅值均选择为12V 电流反馈系数;A V A V I U im /25.14210nom * =?==λβ 转速反馈系数:r V r V n U nm min/02.0min /50010max *?===α 2. 电流环设计 (1)确定时间常数 电流滤波时间常数T oi =0.2ms ,按电流环小时间常数环节的近似处理方法,则
比例积分控制的单闭环直流调速系统仿真 一、实验目的 1.熟练使用MATLAB 下的SIMULINK 仿真软件。 2.通过改变比例系数K P 以及积分时间常数τ的值来研究K P 和τ对比例积分控制的直流调速系统的影响。 二、实验内容 1.调节器的工程设计 2.仿真模型建立 3.系统仿真分析 三、实验要求 建立仿真模型,对参数进行调整,从示波器观察仿真曲线,对比分析参数变化对系统稳定性,快速性等的影响。 四、实验原理 图4-1 带转速反馈的闭环直流调速系统原理图 调速范围和静差率是一对互相制约的性能指标,如果既要提高调速范围,又要降低静差率,唯一的方法采用反馈控制技术,构成转速闭环的控制系统。转速闭环控制可以减小转速降落,降低静差率,扩大调速范围。在直流调速系统中,将转速作为反馈量引进系统,与给定量进行比较,用比较后的偏差值进行系统控
制,可以有效的抑制甚至消除扰动造成的影响。 当t=0时突加输入U in时,由于比例部分的作用,输出量立即响应,突跳到U ex(t)=K P U in,实现了快速响应;随后U ex(t)按积分规律增长,U ex(t)=K P U in+ (t/τ)U in。在t=t1时,输入突降为0,U in=0,U ex(t)=(t1/τ)U in,使电力电子变换器的稳态输出电压足以克服负载电流压降,实现稳态转速无静差。 五、实验各环节的参数及K P和1/τ的参数的确定 5.1各环节的参数: 直流电动机:额定电压U N=220V,额定电流I dN=55A,额定转速n N=1000r/min,电动机电动势系数C e=0.192V ? min/r。 假定晶闸管整流装置输出电流可逆,装置的放大系数K s=44,滞后时间常数T s=0.00167s。 电枢回路总电阻R=1.0Ω,电枢回路电磁时间常数T l=0.00167s电力拖动系统机电时间常数T m=0.075s。 转速反馈系数α=0.01V ? min/r。 对应额定转速时的给定电压U n?=10V。 稳态性能指标D=20,s 5% 。 5.2 K P和1/τ的参数的确定: PI调节器的传递函数为 W PI(s)=K Pτs+1 τs =K P τ1s+1 τ1s 其中,τ1=K Pτ。 (1)确定时间常数 1)整流装置滞后时间常数T s=0.00167s;
河南机电高等专科学校课程设计报告书 课程名称:《交流调速系统与变频器应用》课题名称:造纸机同步控制系统设计 系部名称:自动控制系 专业班级: 姓名: 学号: 1 2014年12月25日
目录 一、造纸机同步控制系统的设计目的 (1) 二、系统的设计要求 (1) 三、造纸机同步控制系统的系统图 (1) 四、控制系统电气原理图 (3) 五、软件设计 (4) 六、程序调试 (5) 七、力控组态及调试 (7) 八、心得与体会 (8) 附录一参考文献 (9) 附录二程序清单 (10)
一、造纸机同步控制系统的设计目的 设计四台电机构成的变频调速同步控制系统:四台电机速度可以同步升降,也可以微调,1#电机微调其他电机同步微调,2#电机微调1#不同步微调,其他电机须同步微调,3#电机微调1#和2#不同步微调,4#电机同步微调,4#电机微调,其他电机均不同步微调。 二、系统的设计要求 1、采用西门子S7-200PLC和MM440变频器。 2、设有启动/停止按钮和速度同步升/降旋钮。 3、每台电机设有选择开关和升/降微调旋钮。 4、采用力控组态软件进行远程控制 三、造纸机同步控制系统的系统图
单相AC 220V 图一、造纸机同步控制系统图 1)就地控制:即外部端子控制,把200PLC程序下载到PLC中,通过外部端子来实现电机的启停,同步增减和微调增减。 2)远程控制:即组态控制,把PLC与力控通过PPI电缆连接,通过组态界面上设置的按钮,开关,速度仪表实现速度的调节。
四、控制系统电气原理图 1)原理图 2)I/O分配图
五、软件设计 控制系统的软件设计基于以下原则: 1)程序模块化、结构化设计、其中负荷分配、速度增减、初始化、紧纸、速比计算、校验、数据发送、接收等功能由子程序完成,这样结构程序较为简洁。2)程序采用循环扫描的方式对传动点进行处理,简化程序,提高程序执行效率。3)采用中断子程序进行数据的发送、接收;确保数据准确快速的传输。 4)必要的软件保护措施,以免造成重大机械损害。该程序通用性强,可移植性好,使用不同的变频器时,只需要进行相应协议的格式定义,即对数据发送、接收、校验程序作相应修改即可满足纸机运行的需要。
电控学院 运动控制系统仿真课程设计 院(系):电气与控制工程学院 专业班级: 姓名: 学号:
开环直流调速系统的动态建模与仿真 摘要: MATLAB仿真在科学研究中的地位越来越高,如何利用MATLAB仿真出理想的结果,关键在于如何准确的选择MATLAB的仿真。本文就简单的开环直流调速系统的MATLAB仿真这个例子,通过对MATLAB的仿真,得到不同的仿真结果。通过仿真结果的对比,对MATLAB的仿真进行研究。从而总结出如何在仿真过程中对MATLAB的仿真做到最优选择。 详细介绍了用MATLAB语言对《电机与拖动》中直流电动机调速仿真实验的仿真方法和模型建立。其仿真结果与理论分析一致,表明仿真是可信的,可以替代部分实物实验。首先在分析直流调速系统原理的基础上, 介绍了基于数学模型的仿真, 在仿真中可灵活调节相关参数, 优化参数设计。其次完成了基于系统框图, 并分析了调速系统的抗干扰能力。采用工程设计方法对开环直流调速系统进行设计,选择调节器结构,进行参数的计算和校验;给出系统动态结构图,建立起动、抗负载扰动的MATLAB 仿真模型。分析系统起动的转速和电流的仿真波形,并进行调试,使开环直流调速系统趋于合理与完善。
1.1课题背景 直流调速是现代电力拖动自动控制系统中发展较早的技术。在20世纪60年代,随着晶闸管的出现,现代电力电子和控制理论、计算机的结合促进了电力传动控制技术研究和应用的繁荣。晶闸管-直流电动机调速系统为现代工业提供了高效、高性能的动力。尽管目前交流调速的迅速发展,交流调速技术越趋成熟,以及交流电动机的经济性和易维护性,使交流调速广泛受到用户的欢迎。但是直流电动机调速系统以其优良的调速性能仍有广阔的市场,并且建立在反馈控制理论基础上的直流调速原理也是交流调速控制的基础。现在的直流和交流调速装置都是数字化的,使用的芯片和软件各有特点,但基本控制原理有其共性。 长期以来,仿真领域的研究重点是仿真模型的建立这一环节上,即在系统模型建立以后要设计一种算法。以使系统模型等为计算机所接受,然后再编制成计算机程序,并在计算机上运行。因此产生了各种仿真算法和仿真软件。 由于对模型建立和仿真实验研究较少,因此建模通常需要很长时间,同时仿真结果的分析也必须依赖有关专家,而对决策者缺乏直接的指导,这样就大大阻碍了仿真技术的推广应用。 MATLAB提供动态系统仿真工具Simulink,则是众多仿真软件中最强大、最优秀、最容易使用的一种。它有效的解决了以上仿真技术中的问题。在Simulink 中,对系统进行建模将变的非常简单,而且仿真过程是交互的,因此可以很随意的改变仿真参数,并且立即可以得到修改后的结果。另外,使用MATLAB中的各种分析工具,还可以对仿真结果进行分析和可视化。 Simulink可以超越理想的线性模型去探索更为现实的非线性问题的模型,如现实世界中的摩擦、空气阻力、齿轮啮合等自然现象;它可以仿真到宏观的星体,至微观的分子原子,它可以建模和仿真的对象的类型广泛,可以是机械的、电子的等现实存在的实体,也可以是理想的系统,可仿真动态系统的复杂性可大可小,可以是连续的、离散的或混合型的。Simulink会使你的计算机成为一个实验室,用它可对各种现实中存在的、不存在的、甚至是相反的系统进行建模与仿真。传统的研究方法主要有解析法,实验法与仿真实验,其中前两种方法在具有各自优点的同时也存在着不同的局限性。随着生产技术的发展,对电气传动在启制动、正反转以及调速精度、调速范围、静态特性、动态响应等方面提出了更高要求,
皖西学院 课程设计任务书 系别:机电学院 专业:10电气 课程设计题目:双闭环串级交流调速控制系统设计学生姓名:诚学号:2010010694 起迄日期: 6 月17日~ 6 月28日课程设计地点:电机与拖动控制实验室 指导教师:世林 下达任务书日期: 6 月17日
摘要 本设计介绍了交流调速系统的基本概况及其研究意义,同时提出了本设计所要研究解决的问题,接着对系统各部分所需元器件进行比较选择并进行总体设计,最后采用工程设计方法对双闭环交流调速系统进行辅助设计,进行参数计算和近似校验。 在调节器选择方面,本设计选择的PI调节器,使得线路大为简化,且性能优良、调试方便、运行可靠、成本降低。触发电路则采用一种新型高性能集成移相触发器(MC787)设计的触发电路,它克服了分立元件缺点,抗干扰性优良,具有输入阻抗高、移相围宽、装调简便、使用可靠、只需一片MC787就可以完成三相相移功能,使用效果较好。 目录
1 绪论 (3) 1.1研究交流调速系统的意义 (3) 1.2本设计所做的主要工作 (3) 2 交流调速系统 (3) 2.1交流电机常用的调速方案及其性能比较 (3) 2.2三相交流调压调速的工作原理 (4) 2.3双闭环控制的交流调速系统 (5) 2.3.1转速电流双闭环调速系统的组成 (6) 2.3.2 稳态结构图和静特性 (6) 3 电路参数计算 (9) 3.1系统主电路的参数计算....................................................... .9 3.2根据系统方块图进行动态计算 (9) 3.3调节器的设计参数计算 .................................................. . (11) 3.3.1 电流调节器的参数计算 ................................................ .12 3.3.2 转速调节器的参数计算................................................ .14 4 控制系统硬件电路设计..................................................... .16 4.1调节器的选择和调整 . (16) 4.2触发电路的设计 (16) 4.3串级调速系统设计 (18) 4. 4双闭环系统设计........................ (19) 5 仿真........................................ .. (21) 6设计体会 (22)
天津职业技术师范大学 课程设计说明书题目:三相异步电动机变频调速系统设计及仿真 指导老师: 班级:机检1112班 组员
天津工程师范学院 课程设计任务书 机械工程学院机检1112 班学生 课程设计课题: 三相异步电动机变频调速系统设计及仿真 一、课程设计工作日自 2015 年 1 月 12 日至 2015 年 1 月 23 日 二、同组学生: 三、课程设计任务要求(包括课题来源、类型、目的和意义、基本要求、完成时 间、主要参考资料等): 1、目的和意义 交流调速是一门重要的专业必修课,它具有很强的实践性。为了加深对所学课程(模拟电子技术、数字电子技术、电机与拖动、电力电子变流技术等)的理解以及灵活应用所学知识去解决实际问题,培养学生设计实际系统的能力,特开设为期一周的课程设计。 2、具体内容 写出设计说明书,内容包括: (1)各主要环节的工作原理; (2)整个系统的工作原理(包括启动、制动以及逻辑切换过程); (3)调节器参数的计算过程。 2.画出一张详细的电气原理图; 3.采用Matlab中的Simulink软件对整个调速系统进行仿真研究,对计算得到的调节 器参数进行校正,验证设计结果的正确性。将Simulink仿真模型,以及启动过程中的电流、转速波形图附在设计说明书中。 4、考核方式 1.周五采用口试方式进行考核(以小组为单位),成绩按百分制评定。其中小组分数占60%,个人成绩占40%(包括口试情况和上交材料内容); 2.每天上午8:30--11:30在综合楼226房间答疑。 五、参考文献 1、陈伯时.电力拖动自动控制系统----运动控制系统(第3版).机械工业出版社,2003 指导教师签字:教研室主任签字:
实验一开环直流调速系统的仿真 一、实验目的 1、熟悉并掌握利用 MATLAB中 Simulink 建立直流调速系统的仿真模型和进行仿真实验的方法。 2、掌握开环直流调速系统的原理及仿真方法。 二、实验内容 开环直流调速系统的仿真框图如图 1 所示,根据系统各环节的参数在 Simulink 中建立开环直流调速系统的仿真模型,按照要求分别进行仿真实验,输出直流电动机的电枢电 流Id 和转速 n 的响应数据,绘制出它们的响应曲线,并对实验数据进行分析,给出相 应的结论。 I dL (s) U n* (s)K s+1/ R I d (s)_R E 1 n( s) T s s 1—T l s 1 +T m s C e 图 1 开环直流调速系统的仿真框图 开环直流调速系统中各环节的参数如下: 直流电动机:额定电压 UN = 220 V,额定电流 IdN = 55 A,额定转速 nN = 1000 r/min ,电动机电势系数 Ce= V ·min/r 。 假定晶闸管整流装置输出电流可逆,装置的放大系数 Ks = 44,滞后时间常数 Ts = s 。电枢回路总电阻 R = Ω,电枢回路电磁时间常数 Tl = s ,电力拖动系统机电时间常数 Tm = s 。 对应额定转速时的给定电压Un*=。 三、实验步骤 1、根据开环直流调速系统的各环节参数建立空载时的Simulink仿真框图,如图2 所示。 图2空载时开环直流调速系统的仿真框图 2、设置合适的仿真时间,利用out器件或示波器将相关数据输出到MATLAB的 Workspace 中,并在 MATLAB中利用 plot (X,Y)函数绘制出空载时直流电动机的电枢电流Id 和转速 n 的响应曲线,记录并分析实验数据,给出相应的结论。 3、根据开环直流调速系统的各环节参数建立带负载时的Simulink仿真框图,如图3所示。 图 3 带负载时开环直流调速系统的仿真框图 4、设置合适的仿真时间,在 1s 时分别加入负载电流为 IdL=10 、20、50A,利用 out 器件或示波器将相关数据输出到 MATLAB的 Workspace 中,并在 MATLAB中利用 plot (X,Y)函数绘制出在 1s 时加入负载电流分别为 IdL=10 、20、50A 时直流电动机的电枢电流 Id 和转速n 的响应曲线,记录并分析实验数据,给出相应的结论。
摘要 对于可调速的电力拖动系统来说,工程上通常分为直流调速系统和交流调速系统两大类。根据电动机在电能和机械能的转换时电流制型式的不同来分类,关于交流调速系统,它利用交流电动机来进行电能—机械能的转换,并且通过控制产生我们所需要的转速。在电力拖动的发展过程中,交流调速系统和直流调速系统一直并存于各个工业领域中,但是,在科学技术发展的不同时期,他们所处的地位也有所不同。相对于直流调速系统,交流调速系统具有结构简单,制造成本低,坚固耐用,运行可靠,维护方便,惯性小,动态响应好,等优点并且在向高速,高压和大功率的发展前景也较好。近年来,很多国家偏向于对交流调速系统的研究。 关键词:矢量控制,交流调速,变频器,变频调速 第一章交流调速系统的发展 1.1交流调速系统的发展历程 在工业发展的初级阶段,交流电动机仅仅作为动力使用而无需调速。随着工业的进一步发展,尤其是电子方面和起重运输机械的发展,才对电动机的调速提出了要求,才有了直流电动机的出现。直流电机提高了生产的连续性和产品的产量以及质量,并且以其快速的正反转,准确的定位逐渐取代了简单可靠的交流电机,并且到了了广泛的运用于各行业。 80年代以来,由于直流调速系统造价高,维护投入大等缺点,在工业较为发达的国家开始使用直流调速系统,并且逐渐取代直流调速系统。这主要是由于电力电子器件,脉宽调制技术,矢量控制技术的发展,特别是以微处理机为核心的全数字化控制的应用,这才使得简单廉价的交流电机又得以取代直流电机调速系统占据主导地位。 现代控制理论的发展和应用,才促成矢量控制的出现,更是奠定了现代交流电机调速技术的理论基础,这才使得交流电机调速系统的性能能够与直流调速系统相媲美。国家的重视使得各种各样的的交流调速系统不断被开发,应用,普及,节约了社会上的大量资源,更是将社会上的传统产业发生了巨大的变革。 1.2交流调速系统的发展趋势 1.2.1交流调速系统的高性能化 交流电动机是一个多变量,强耦合,非线性的被控对象,单单用电压/频率恒定控制是不能满足我们对调速系统的要求的。接下来,交流调速系统将采用矢量控制技术,它将使调速性能达到并且超过直流调速系统。 矢量变换控制是新时期控制技术的发展随之产生的控制理论和技术,它是根据直流电动机的控制特点模拟它的控制方式来进行交流电动机的控制。直流调速的调速性能好的根本原因是交流电动机的转矩比较容易控制,而交流电动机的调速性能差就由于它的转矩难以控制,所以,要想交流电机得到的控制性能和直流电机的一样,就要通过电机统一理论和坐标变换理论,通过将交流电机的定子电流分解成磁场定向坐标的磁场电流分量以及跟它相垂直的坐标的转矩电流分量,将固定的坐标系转化为旋转坐标系解耦后,就是把交流量的控制转化为
交流调速系统仿真分析 1 课题来源 本课题来源于三峡大学电气与新能源学院毕业论文自选课题。 2 研究的目的和意义 电动机(尤其是交流电动机)在工业.农业.交通运输.国防军事设施以及日常生活中被广泛的应用。其中许多的场合有着调速的要求从节能的角度出发。开发研究与风机,泵类负载相适应的配套调速装置,市场是非常广阔的,与我国的经济能源状况相适应,对交流系统进行建模仿真,可以熟悉交流调速系统的结构,掌握各种调速系统的优缺点,选择合理的方案,解决实际中的问题。 3 国内外的研究现状和发展趋势 目前,交流调速已进入逐步替代直流调速的时代。电力电子器件的发展为交流调速奠定了物质基础。50年代末出现了晶闸管,由晶闸管构成的静止变频电源输出方波和阶梯波的交变电压,取代旋转变频机组实现了变频调速,然而晶闸管属于半控型器件,可以控制导通,但不能由门极控制关断,因此由普通晶闸管组成的逆变器用于交流调速必须附加强迫换相电路。70年代以后,功率晶体管(GTR).门极关断晶闸管(GTO晶闸管).功率场效应晶闸管(Power MOSFET).绝缘栅双极晶体管(IGBT)。 MOS控制晶闸管(MCT)等已经先后问世,这些器件都是既能控制导通又能控制关断的自关断器件,又称全控型器件。它不再需要强迫换相电路,使得逆变器构成简单.结构紧凑。IGBT由于兼有MOSFET和GTR的优点,是用于中小功率目前最为流行的器件,MCT则综合了晶闸管的高电压.大电流的特性和MOSFET的快速开关特性,是极有发展前景的大功率.高频率开关器件。电力电子器件正在向大功率化.高频化.模块化.智能化的方向发展。80年代以后出现的功率集成电路(Power IC),集功率开关器件,驱动电路,保护电路,接口电路于一体,目前已应用于交流调速的智能功率模块(Intelligent Power Module IPM)采用IGBT作为功率开关,含有电流传感器.驱动电路及过载.短路.超温.欠电压保护电路,实现了信号处理.故障诊断.自我保护等多种智能功能,既减少了体积.减轻了重量,又提高了可靠性,使用.维护都更加方便,是功率器件的重要发展方向。
《电气控制与PLC》课程设计说明书 令狐文艳 基于PLC的变频调速系统设计 The variable frequency speed regulation system based on PLC design 学生姓名 学生学号 学院名称 专业名称电气工程及其自动化 指导教师 2013年12月1日
摘要 本文主要介绍了研究和设计的基于可编程控制器的变频调速系统的成果,在本次的设计中,我的设计系统主要由PLC、变频器、电动机等几部分组成。经过本次设计和研究,使我对所有器件有了新的认识,尤其对PLC有了更多的了解:PLC是能进行行逻辑运算,顺序运算,计时,计数,和算术运算等操作指令,并能通过数字式或模拟式的输入输出,控制各种类型的机械或生产过程的工业计算机。首先我们查阅各个器件的资料,先对其有个明确的认识,然后通过老师的指点明白了整个系统的大概工作原理框图后,通过学习资料与老师指点将硬件设备连接成功。本文综合应用电子学与机械学知识去解决基于可编程控制器的变频调速系统,本次设计选用三相异步交流电机,而 PLC和交流电机无论在工业还是生活中都是应用最广,因此本次设计具有相当的实用价值。 关键词PLC;变频器;电动机;调速
目录 1 引言1 1.1 概述1 1.2设计内容1 2 系统的功能设计分析和总体思路2 2.1 系统功能设计分析2 2.2 系统设计的总体思路2 3 PLC和变频器的选择3 3.1PLC的概述3 3.1.1 PLC的基本结构3 3.1.2 PLC的工作原理5 3.1.3PLC的型号选择6 3.2变频器的选择和参数设置6 3.2.1 变频器的选择6 3.2.2 变频调速原理7 3.2.3 变频器的工作原理8 3.2.4 变频器的快速设置8 4 开环控制设计及PLC编程9 4.1 硬件设计9 4.2 PLC软件编程10 4.2.1设计步骤10 4.2.2系统流程框图10 4.2.3 程序的主体11 4.2.4 控制程序T形图11 5 PLC系统的抗干扰设计17 5.1 变频器的干扰源17 5.2 干扰信号的传播方式17 5.3 主要抗干扰措施18 5.3.1 电源抗干扰措施18 5.3.2 硬件滤波及软件抗干扰措施18 5.3.3 接地抗干扰措施18 结论与心得19 参考文献20 附录21
用单片机控制的电机交流调速系统设计 文摘单片机控制的变频调速系统设计思想是用转差频率进行控制。通过改变程序来达到控制转速的目的。由于设计中电动机功率不大,所以整流器采用不可控电路,电容器滤波;逆变器采用电力晶体管三相逆变器。系统的总体结构主要由主回路,驱动电路,光电隔离电路,HEF4752大规模集成电路,保护电路,Intel系列单片机,Intel8253定时/记数器,Intel8255可编程接口芯片,Intel8279通用键盘/显示器,I/O接口芯片,CD4527比例分频器和测速发电机等组成。回路中有了检测保护电路就可以使整个系统运行的可靠性有了保障。 关键词MCS-51单片机;HEF4752;8253定时器;晶闸管;整流器;三相异步电动机
Exchange the speed of adjusting to design systematically with the electrical machinery that the one-chip computer controls Zhoumingqiang information and Electrical Engineering School, panzhihua university, Panzhihua 617000 Abstract Frequency conversion that one-chip computer control transfer speed systematic design philosophy with transfer to difference frequency control. Achieve the goal of controlling rotational speed through changing the procedure . Because the motor is not big in power in the design, the rectifier can not adopt controlledly the circuit, the condenser strains waves; Going against the becoming device adopts three phases of the electric transistor to go against the becoming device. The systematic ensemble architecture is by the main return circuit mainly, drive the circuit, the photo electricity isolates the circuit, HEF4752 large scale integrated circuit, protects the circuit, the Intel series one-chip computer, Intel8253 timing /count device of,Intel8255 programmable interface chip,Intel8279 keyboard not in common use / display, I/O interface chip, CD4527 proportion frequency division device and tests the speed such composition as the generator ,etc.. Have the dependability that can make the whole system operate of measuring and protecting the circuit to have guarantee in the return circuit [keywords] MCS-51;HEF4752;time/counter of l8253;selenium;rectifier;three phase eletromotor of asynchronism