恒压频比控制的调速系统仿真
摘要:作为一种常用的变频调速方法,恒压频比控制(简称U/F 控制)在改变输出频率和电压的同时保持磁通不变,实现电机在较大范围内的平滑调速运行。该方法能够满足大多数场合交流电动机调速控制的要求,并且使用方便,从而得到广泛的应用。本文通过介绍恒压频比变频调速的原理,应用MATLAB 仿真软件,实现了异步电动机变频调速系统的仿真,并且详细分析了其仿真结果。
关键字:变频调速,恒压频比,异步电机,MATLAB 仿真
一、恒压频比变频调速原理
变频调速系统一般要求在变频时保持电机气隙磁通m Φ不变,这样可在允许的电流下获得最大的转矩,使电机具有良好的调速性能。交流电机每相定子感应电动势为
4.44s s s s m s m
E f N K Cf =Φ=Φ (1)
式中,C 是由电动机结构决定的常数。
从式(1)可见,在改变频率s f 时要保持气隙磁通m Φ不变,就需要同时改变s E ,使s E 随s f 变化并保持/s s E f 为固定的常数m C Φ。因为s E 不能直接检测和控制,在忽略定子绕组电阻时s E 近似等于电动机端电压s U 。而s U 和s f 都可以方便地通过变频器控制,因此仅要求稳态时转速的调节,异步电动机变频调速系统常采用/s s U f =常数的控制,也称为VVVF 控制或恒压频比控制。
给定
升降速时间设定
低频电压补偿
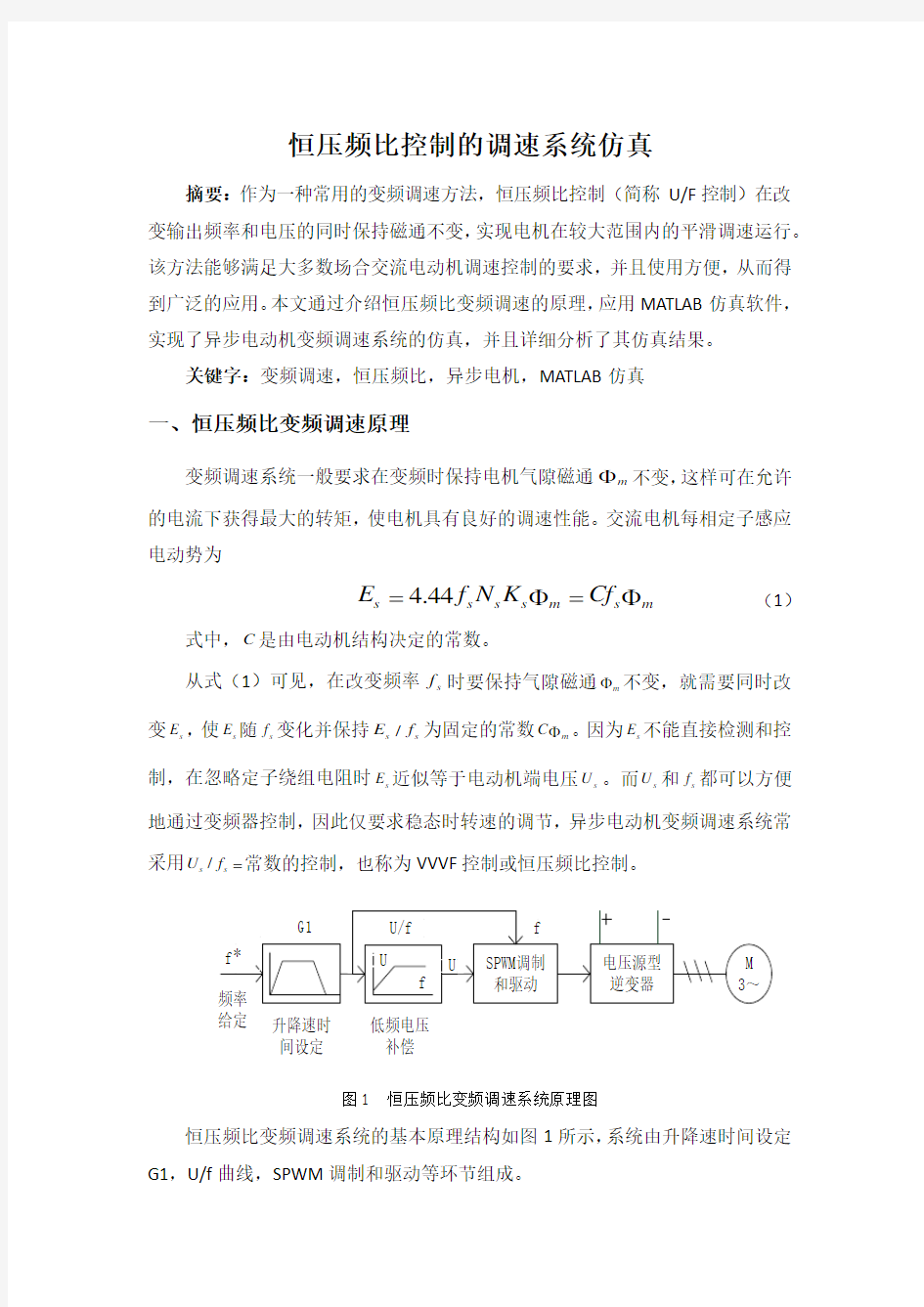
图1 恒压频比变频调速系统原理图
恒压频比变频调速系统的基本原理结构如图1所示,系统由升降速时间设定G1,U/f 曲线,SPWM 调制和驱动等环节组成。
二、恒压频比变频调速系统模型
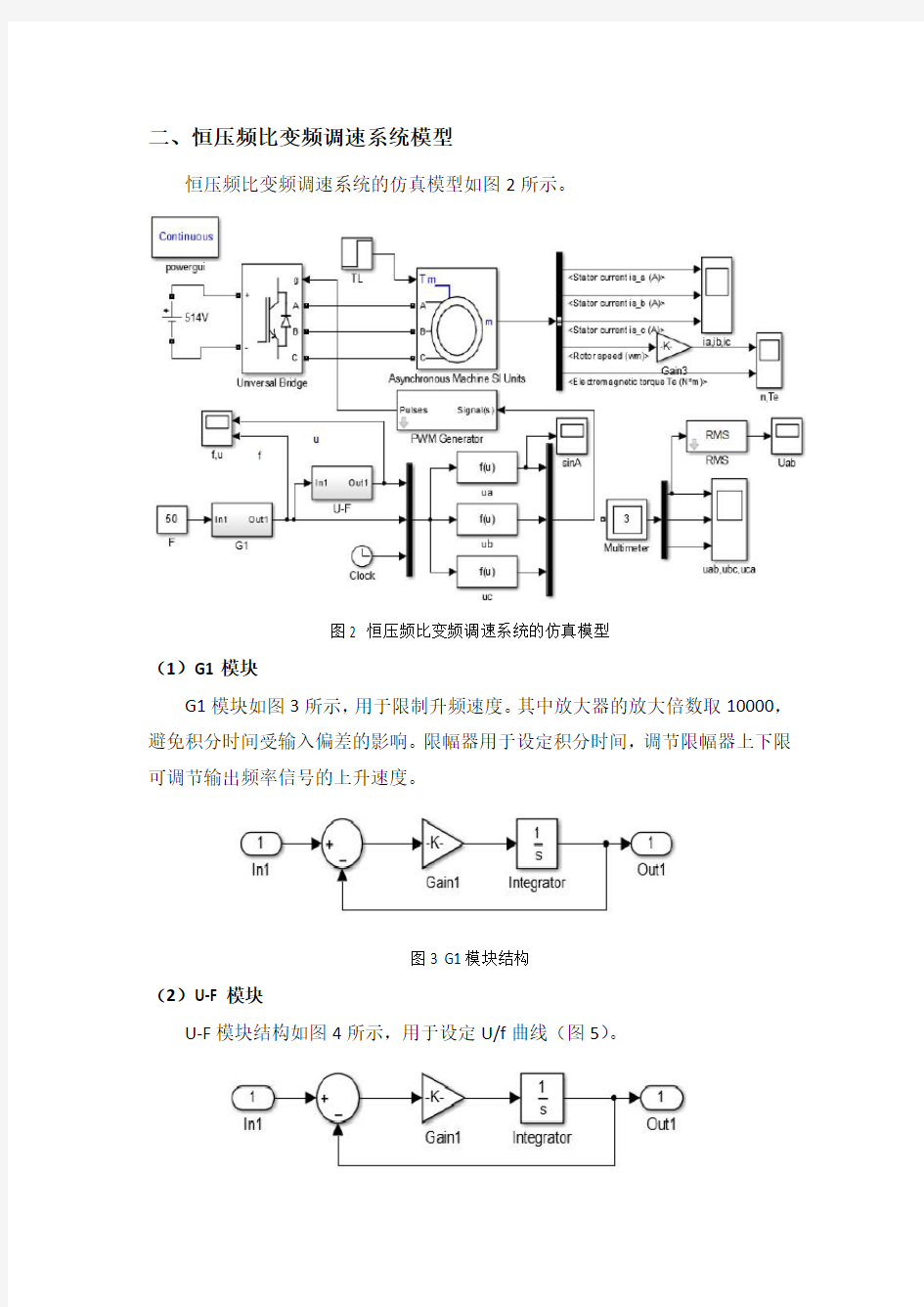
恒压频比变频调速系统的仿真模型如图2所示。
图2 恒压频比变频调速系统的仿真模型
(1)G1模块
G1模块如图3所示,用于限制升频速度。其中放大器的放大倍数取10000,避免积分时间受输入偏差的影响。限幅器用于设定积分时间,调节限幅器上下限可调节输出频率信号的上升速度。
图3 G1模块结构
(2)U-F模块
U-F模块结构如图4所示,用于设定U/f曲线(图5)。
图4 U-F 模块结构
U U U N
图5 U/f 曲线
模型中函数发生器Fcn1用于产生与频率f 相应的电压信号u ,函数表达式为
0()N N
U U u f f U f -=
+(2)式中,N U 为电机额定
电压;0U 为起动时的补偿电压;N f 为电机额定频率。
模型中用放大模块Gain2调整Fcn1模块的输出信号幅值,并且经过Saturation 模块限幅以保证U-F 模块输出不大于1。 (3)函数模块a u ,b u ,c u
经汇总的变量输入三个函数模块产生三相调制信号a u ,b u ,c u
(1)sin[2(2)(3)]
2(1)sin[2(2)(3)]
34(1)sin[2(2)(3)]
3a b c u u pi u u pi u u pi u u pi
u u pi u u =*****=****-*=****+
(3) 再经PWM Generator 模块产生逆变器的驱动脉冲,经逆变器得到三相可调电压,控制电机的起动和运行。
三、恒压频比变频调速系统模型参数
四、恒压频比变频调速系统仿真
在给定频率50Hz、电动机空载起动、1s时加负载50N.m情况下,仿真结果如图6所示。
图6(a)频率给定曲线
图6(b)补偿后电压曲线
图6(c)逆变器输出线电压
图6(d)逆变器输出线电压有效值
图6(e)转速波形
图6(f)转矩波形
其中图(a)为频率上升曲线,经过一段时间频率上升到给定频率50Hz。图(b)为补偿后与频率对应的电压上升曲线,电压和频率基本保持同步,最后稳定到1V。图(d)为电动机输入的一相线电压(有效值),电压最终达到380V左右的电压额定值。图(e)为转速变化过程,电机从转速零起动,空载稳定转速为1500r/min,在1s时给电机施加负载,转速下降到1300r/min。图(f)为转矩波形,空载时转矩为零,1s时加负载,转矩变为500N.m。
从图中可以看到电动机电压基本按曲线的设定上升,但是起动中转速和转矩的波动很大。从逆变器输出电压的波形中可以看到,输出电压的频率变化呈现出不规则,电压频率不是均匀地上升,中间部分时段电压波形的周期变大,频率减小。在频率变化的边界上,正弦调制信号和转速都发生了畸变,这是因为频率变化的时刻不一定是发生在调制信号一个完整周期的末尾,在调制正弦信号一周期尚未结束时,频率发生了变化就可能使下一周期信号的前半周期变宽或变窄,使相应的一周期频率减小或增加。进一步比较频率变化时刻的三相电压波形,这时的三相电压的相序也可能异常,出现瞬时的负相序,电动机也产生了负的转矩,从而使电动机的转矩和转速发生急剧波动。延长起动时间,波动的情况可以减小,但是波动还是存在的。如果起动时间设定过小,在正弦一周内发生多次频率的变化,还可以出现增频现象,使逆变器输出频率超过设定频率(50Hz) ,电动机转速出现超调。因此采用等时间间隔的升频过程,都难以完全避免输出电压周期不规则的现象,工程上称之为"跳频"现象。
五、总结
这次通过Matlab软件仿真,我了解到电力电子变流技术在实际生活中的重要作用,并且对常用电力电子器件在MATLAB中的实现以及常用器件参数的设置有了实际的体验。这次仿真让我认识到掌握基础知识的重要性。复杂知识都是基础知识的堆积,抓住了基础,再难的问题都可以拆解开来简化处理。同时也深深体会到Matlab软件在本专业中的应用。
参考文献
[1]李华德. 交流调速控制系统[M]. 电子工业出版社. 2003.3.
[2] 洪乃刚. 电力电子和电力拖动控制系统的MATLAB仿真[M]. 北京:机械
工业出版社, 2006.
[3] 陈伯时. 电力拖动自动控制系统—运动控制系统第3版[M]. 北京:机械工业出版社, 2007.
[4] 任彦硕. 自动控制原理[M]. 北京:机械工业出版社, 2006.
实验一 基于Matlab 的控制系统模型 姓名 学号 班级 一、实验目的 1) 熟悉Matlab 的使用环境,学习Matlab 软件的使用方法和编程方法。 2) 学习使用Matlab 进行各类数学变换运算的方法。 3) 学习使用Matlab 建立控制系统模型的方法。 二、实验原理 1. 香农采样定理 对一个具有有限频谱的连续信号f (t )进行连续采样,当采样频率满足ωs ≥ωmax 时,采样信号f *(t )能无失真的复现原连续信号。 (1) 作信号f (t )=5e 10t 和f *(t ) =5e 10kT 的曲线,比较采样前后的差异。 0.05 0::0.5 5*(10*) subplot(2,1,1) plot(,) grid subplot(2,1,2) stem(,) grid T t T f exp t t f t f ===- 请改变采样周期T ,观察不同的采样周期下的采样效果。
(2) 频谱曲线 50:1:50 5./(100.^2) (,)w F sqrt w plot w F grid =-=+ 若|F (j ωmax ) |=0.1|F (0)|,选择合理的采样周期T 并验加以证。 400:20:400 200 2*/05/*(1./(100.^2)) 15/*(1./(100().^2)) 25/*(1./(100().^2)) (,0,,1,,2) w ws Ts pi ws F Ts sqrt w F Ts sqrt w ws F Ts sqrt w ws plot w F w F w F grid =-===+=+-=++ 请改变采样频率,观察何时出现频谱混叠? 2. 拉式变换和Z 变换 (1) 使用Matlab 求函数的拉氏变换 拉式变换: 反拉氏变换: ()()()()()()2 222 1exp -*123*exp -*4sin *5exp -*s 11/(1) 21/()31/4/() 51/(*(2)*(*c 3)o ) s *yms syms a w t f a t laplace f f t f t a t f s a f s ilaplace f f s a f s f w s w f s s s w t f a t w t ==+==+====++== (2) 使用Matlab 求函数的Z 变换 Z 变换: 反Z 变换:
MATLAB/Simulink 电力系统建模与仿真 实验报告 姓名:****** 专业:电气工程及其自动化 班级:******************* 学号:*******************
实验一无穷大功率电源供电系统三相短路仿真 1.1 无穷大功率电源供电系统仿真模型构建 运行MATLAB软件,点击Simulink模型构建,根据电路原理图,添加下列模块: (1)无穷大功率电源模块(Three-phase source) (2)三相并联RLC负荷模块(Three-Phase Parallel RLC Load) (3)三相串联RLC支路模块(Three-Phase Series RLC Branch) (4)三相双绕组变压器模块(Three-Phase Transformer (Two Windings)) (5)三相电压电流测量模块(Three-Phase V-I Measurement) (6)三相故障设置模块(Three-Phase Fault) (7)示波器模块(Scope) (8)电力系统图形用户界面(Powergui) 按电路原理图连接线路得到仿真图如下: 1.2 无穷大功率电源供电系统仿真参数设置 1.2.1 电源模块 设置三相电压110kV,相角0°,频率50Hz,接线方式为中性点接地的Y形接法,电源电阻0.00529Ω,电源电感0.000140H,参数设置如下图:
1.2.2 变压器模块 变压器模块参数采用标幺值设置,功率20MVA,频率50Hz,一次测采用Y型连接,一次测电压110kV,二次侧采用Y型连接,二次侧电压11kV,经过标幺值折算后的绕组电阻为0.0033,绕组漏感为0.052,励磁电阻为909.09,励磁电感为106.3,参数设置如下图: 1.2.3 输电线路模块 根据给定参数计算输电线路参数为:电阻8.5Ω,电感0.064L,参数设置如下图: 1.2.4 三相电压电流测量模块 此模块将在变压器低压侧测量得到的电压、电流信号转变成Simulink信号,相当于电压、电流互感器的作用,勾选“使用标签(Use a label)”以便于示波器观察波形,设置电压标签“Vabc”,电流标签“Iabc”,参数设置如下图:
于MATLAB_Simulink的牵引变压器建模与仿真 基于MATLAB/Simulink的牵引变压器建模与仿真徐(西安铁路局安康供电段新陕西汉中 723000)摘要:针对多种牵引变压器接线方式,建立数学模型,基于Matlab/Simulink仿真软件,建立牵引变压器的仿真模型,并验证数学模型和仿真模型的一致性。利用所建立仿真模型对不同接线形式牵引变压器在不同条件下对公用电网产生的谐波和负序影响进行仿真试验,对研究各种类型的牵引变压器特性在我国电气化铁路的应用提供条件。关键词:牵引变压器;数学模型;仿真模型;Matlab/Simulink 中图分类号:U223.6 文献标识码:A 文章编号:1671-7597(2011)0610061-03 牵引变压器按其特性可分为平衡接线和不平衡接线。其中不平衡接线有单相接线、Vv接线和YNd11接线;平衡接线是试图实现三相两相对称变换而提出的,主要代表方式有Scott,Leblanc、Kubler、Wood-bridge、阻抗匹配接线等。本次主要总结了常用牵引变压器的特点并建立数学模型,包括每种牵引变压器的原理结构、原次边电气量关系等,基于Matlab/Simulink软件建立牵引变压器仿真模型,并对牵引变压器在不同条件下的负序、谐波特性的进行了研究. 1 牵引变压器数学模型研究 1.1 YNd11接线 YNd11变压器接线原理如下图所示,如果忽略激磁电流及其漏阻抗压降,二次侧绕组ac相与一次侧绕组A相同相,cb相与C相同相。由于变压器一次侧绕组A,B,C相与电力系统的相序一致,A相滞后C相,对应的二次侧ac也滞后cb相[2]。其中Z为牵引端口对应变压器漏抗,和β相的端口电压。 1.2 Vv接线 Vv接线牵引变压器接线原理如图2所示。为二次侧空载相即α相图2 Vv接线牵引变压器设Vv接线变压器一次侧、二次侧绕组匝数分别为可得电流输入输出关系[3]:和,电压输入输出关系如下:图1 YNd11接线牵引变压器设YNd11接线变压器一次侧、二次侧绕组匝数分别为和假设变压器原边中性点接地,可以得出一次侧三相电流。,其中为牵引端口对应变压器漏抗,为二次侧空载相即α相和β相的端口电压。 1.3 Scott接线 Scott接线变压器(又称T形接法变压器)属于能完成三相-两相变换的平衡变压器,Scott接线牵引变压器接线原理如图3所示。图3 Scott牵引变压器接线原理图 1 61 设一次侧绕组BC的匝数为次侧绕组AD的匝数为,记,二次的绕组ad、bc的匝数为,则一。可得电流输入输出关系[4]:把一次侧绕组电流用相电流替换,即为:式中,为从三相端子流进变压器的电流。输出端口电压方程为:图6 YNd11接线牵引变压器两供电臂输出电压波形从电压输出波形中可以得到α供电臂电压波形超前β供电臂电压波形120°,在对称阻性负载下,两臂电流输出波形幅值相同,相位相差120°,满足理论值。 2.2 Vv接线牵引变压器 Vv 接线牵引变压器是由两个单相牵引变压器并联而成,仿真模型如图7所示.在仿真模型中牵引变压器T1和T2的原、次边变比设置为110kV/27.5kV。对,于
课程设计报告 题目PID控制器应用 课程名称控制系统仿真院部名称龙蟠学院 专业自动化 班级M10自动化 学生姓名 学号 课程设计地点 C208 课程设计学时一周 指导教师应明峰 金陵科技学院教务处制成绩
一、课程设计应达到的目的 应用所学的自动控制基本知识与工程设计方法,结合生产实际,确定系统的性能指标与实现方案,进行控制系统的初步设计。 应用计算机仿真技术,通过在MATLAB软件上建立控制系统的数学模型,对控制系统进行性能仿真研究,掌握系统参数对系统性能的影响。 二、课程设计题目及要求 1.单回路控制系统的设计及仿真。 2.串级控制系统的设计及仿真。 3.反馈前馈控制系统的设计及仿真。 4.采用Smith 补偿器克服纯滞后的控制系统的设计及仿真。 三、课程设计的内容与步骤 (1).单回路控制系统的设计及仿真。 (a)已知被控对象传函W(s) = 1 / (s2 +20s + 1)。 (b)画出单回路控制系统的方框图。 (c)用MatLab的Simulink画出该系统。
(d)选PID调节器的参数使系统的控制性能较好,并画出相应的单位阶约响应曲线。注明所用PID调节器公式。PID调节器公式Wc(s)=50(5s+1)/(3s+1) 给定值为单位阶跃响应幅值为3。 有积分作用单回路控制系统PID控制器取参数分别为:50 2 5 有积分作用单回路控制系统PID控制器取参数分别为:50 0 5
大比例作用单回路控制系统PID控制器取参数分别为:50 0 0 (e)修改调节器的参数,观察系统的稳定性或单位阶约响应曲线,理解控制器参数对系统的稳定性及控制性能的影响? 答:由上图分别可以看出无积分作用和大比例积分作用下的系数响应曲线,这两个PID调节的响应曲线均不如前面的理想。增大比例系数将加快系统的响应,但是过大的比例系数会使系统有比较大的超调,并产生振荡,使稳定性变坏;
成绩
课程设计说明书(计算书、论文)
题 目 信号与系统的 MATLAB 仿真
课 程 名 称 院 (系)
信号与系统 电子通信工程学院
专 业 班 级 学 生 姓 名 学 号
设 计 地 点 指 导 教 师
设计起止时间:
年
月 日
至
年
月
日
1.
课程设计应达到的目的
(1)熟悉 Matlab 软件的运行环境 (2)掌握采用 Matlab 软件程序实现信号与系统分析的方法 (3)掌握正确的编程过程和仿真分析 (4)总结对比软件仿真与硬件实验的区别及特点 2.课程设计题目及要求 《信号与系统》课程设计选题主要是要体现本课程的主要教学 内容中的重点部分,同时要求选题能过反映出信号仿真的代表性, 系统分析的应用性, 灵活性, 并且能与原本理论教学中繁琐的数学 计算相比较, 体现出软件计算的方便快捷性, 本课程设计主要包括 四个小设计部分,分别是: (1)信号的产生与简单运算:产生一个方波周期为 4π ,t[0 50]。
(2)?求解微分方程:y"(t)+3y'(t)+2y(t)=2e-2 ε(t)求 yzs; ?求卷积:e-2 ε (t)*e-3 ε (t)
t t
t
(3)求 H (s) ?
2s 2 ? 1 s 3 ? 4s 2 ? 6s ? 9
?求零、极点 ?并绘图 ?冲激响应
(4)求解差分方程:y(n)-y(n-1)-2y(n-2)=f(n) ?f(n)=( 1 )nε (n)
3
?f(n)=δ (n)
3.课程设计思路 利用信号与系统中的 matlab 常用命令集求解微分方程,并利用结 果和绘图命令绘图。
4.课程设计原理 设计原理 (1)设计一个简单程序能实现方波信号的生成。 利用Matlab软件的信号处理工具箱(Signal Processing Toolbox)中的专用函数产生 信号并绘出波形。
(2) ?对于求方程的零状态响应,即是求解常微分方程。Matlab 解常微分方程式的语法是 dsolve('equation','condition'),其中equation代表常微分方程式即 y'=g(x,y), 且须以Dy代表一 微分项y'',condition则为初始条件。 ?利用MATLAB中conv命令求解卷积。 阶微分项y' D2y代表二阶
第 4 章 MatLab 的程序设计 MatLab 是一个工具、开发平台,同时它也是一门编程语言。与在命令窗口用交互的方式工作相比,通过程序运行来解决实际问题,其效率更高,因此,凡是复杂的、大型的应用都是以程序的方式执行。相对其它高级语言, MatLab 更简单、编程的效率更高、调试过程也更容易。 MatLab 中的程序文件是以 m 为后缀,所以通常将 MatLab 的程序文件称为 m 文件。MatLab提供了两种形式的m文件,即:脚本(Script)式m文件(就简称m文件)、函数型 m 文件。在 MatLab 中已经嵌入了一个功能强大的集成开发环境—— m 文件编辑器,用它来进行程序的编辑、修改、调试、运行等,完成应用开发工作。 4.1 MatLab 程序设计基础 通过前面内容的学习,大家对 MatLab 已经有了一个初步的认识和印象,到目前为止,我们都是在“命令”窗口中,以交互的方式运行,完成我们的工作。实际上简单的m 文件,就是一个批处理程序,它是若干条命令的集合。 例: 4.1.1 M 文件规则和属性 函数 M 文件必须遵循一些特定的规则。除此之外,它们有许多的重要属性,这其中包括: 1. 函数名和文件名必须相同。例如,函数 fliplr 存储在名为 fliplr.m 文件中。 2. MATLAB 头一次执行一函数个 M 文件时,它打开相应的文本文件并将命令编辑成存储器的内部表示,以加速执行以后所有的调用。如果函数包含了对其它函 数 M 文件的引用,它们也同样被编译到存储器。普通的脚本 M 文件不被编译,即使它们是从函数 M 文件内调用;打开脚本 M 文件,调用一次就逐行进行注释。 3. 在函数 M 文件中,到第一个非注释行为止的注释行是帮助文本。当需要帮助时,返回该文本。例如, ? help fliplr 返回上述前八行注释。 4. 第一行帮助行,名为 H1 行,是由 lookfor 命令搜索的行。 5. 函数可以有零个或更多个输入参量。函数可以有零个或更多个输出参量。
第1 页共11 页 倒立摆系统的建模及Matlab仿真 1.系统的物理模型 考虑如图(1)所示的倒立摆系统。图中,倒立摆安装在一个小车上。这里仅考虑倒立摆在图面内运动的二维问题。 图(1)倒立摆系统 假定倒立摆系统的参数如下。 摆杆的质量:m=0.1g l=1m小车的质量:摆杆的长度:2重力加速度:g=9.8m/M=1kg s摆杆的质量在摆杆的中心。 设计一个控制系统,使得当给定任意初始条件(由干扰引起)时,最大超调量?≤10%,调节时间ts ≤4s ,通过小车的水平运动使倒立摆保持在垂直位置。 2.系统的数学模型 2.1建立倒置摆的运动方程并将其线性化。 为简化问题,在数学模型中首先假设:1)摆杆为刚体;2)忽略摆杆与支点之间的摩擦;3)忽略小车与接触面间的摩擦。 ?),在u设小车瞬时位置为z,摆心瞬时位置为(作用下,小车及摆均产生加速远 动,sin?lz根据牛顿第二定律,在水平直线远动方向的惯性力应与u平衡,于是有 22dzd?)?sinu?M?m(zl22dtdt???2????z(M?mml?)cos?mlusin? 即:??①
绕摆轴转动的惯性力矩与重力矩平衡,因而有. 第2 页共11 页 2??d??? sin??lcosm(z?lsinmgl)??2dt?????22???????即: nis?l?ocgcosincoszs?ls??② 以上两个方程都是非线性方程,为求得解析解,需作线性化处理。由于控制的目的是保持倒立摆直?2?????且可忽略则,立,在试驾合适的外力条件下,假定θ很小,接近于零时合理的,1sincos??,项。于是有 ???M?zm?u?ml??)(③ ????g?z?l??④联立求解可得1mg?u?z????MM 1)?m(M????u??MlMl 列写系统的状态空间表达式。2.2??T xx,x,x,,选取系统变量则 xx,x,xx?,42134123xx??211mgux???x?32MM x?x?431)(M?mu?x?x? 34MlMl 即00100????z??1mg??????000?z?????d MM??Bu?Ax?xux????????00001???dt????1gm?(M)????000??????? MlMl??????Cx?0?y?xx1001代入数据计算得到:0100????000?1??????T0D,?0??1BA?,?001,C100??1000??00011?? 11 页3 页共第 3.设计控制器3.1判断系统的能控性和稳定性 1100????0011????23BBAABAB?Q?故被控对象完全可控, rank()=4,Q kk??11?0?10??011?10???22???11?。出现大于零的特征值,故被,,0 解得特征值为 0由特征方程0??11I?A?)(控对象不稳定3.2确定希望的极点, 另一对为远极点,认为系统性能主要由主导,选其中一对为主导极点和希望的极点n=4ss21极点决定,远极点只有微小影响。根据二阶系统的关系式,先确定主导极点???42??1????10.?e??t1.67?有,闭环可得;取误差带,于是取,则6.?059?0.02.?0? pns??n2????1?js??=-10.8j,远极点选择使它和原点的距离大于主导极点与原点 距离主导极点为?n,21s??15倍,取的54,33.3采用状态反馈方法使系统稳定并配置极点 ??kkkk?k;状态反馈系统的状态方程,馈状态反的控制规律为为kxu??3102?,其
课程设计说明书 题目:基于Matlab的IIR滤波器设计与仿真班级:2012 级电气五班 姓名:王璐 学号:201295014178 指导教师:张小娟 日期:2015年 1 月12日
课程设计任务书
基于MATLAB的IIR滤波器设计与仿真 前言 数字信号处理(digital signal processing,DSP)是从20世纪60年代以来,随着信息学科和计算机学科的高速发展而迅速发展起来的一门新兴学科。数字信号处理是把信号用数字或符号表示的序列,通过计算机或通用(专用)信号处理设备,用数字的数值计算方法处理(例如滤波、变换、压缩、增强、估计、识别等),以达到提取有用信息便于应用处理的目的。数字信号处理系统有精度高、灵活性高、可靠性高、容易大规模集成、时分复用、可获得高性能指标、二维与多维处理等特点。正是由于这些突出的特点,使得它在通信、语音、雷达、地震测报、声呐、遥感、生物医学、电视、仪器中得到愈来愈广泛的应用。在数字信号处理中起着重要的作用并已获得广泛应用的是数字滤波器(DF,Digital Filter),根据其单位冲激响应函数的时域特性可分为两类:无限冲激响应IIR(Infinite Impulse Response)滤波器和有限冲激响应FIR(Finite Impulse Response)滤波器。MATLAB的基本数据单位是矩阵,它的指令表达式与数学、工程中常用的形式十分相似,故用MATLAB来结算问题要比用C,FORTRAN等语言完成相同的事情简捷得多,并且MATLAB也吸收了像Maple等软件的有点,使MATLAB成为一个强大的数学软件,在新的版本中也加入了对C,FORTRAN,C++,JA V A的支持。可以直接调用,用户也可以将自己编写的实用程序导入到MATLAB函数库中方便自己以后调用。 1 数字滤波器概述 数字滤波器是对数字信号实现滤波的线性时不变系统。数字滤波实质上是一种运算过程,实现对信号的运算处理。输入数字信号(数字序列)通过特定的运算转变为输出的数字序列,因此,数字滤波器本质上是一个完成特定运算的数字计算过程,也可以理解为一台计算机。描述离散系统输出与输入关系的卷积和差分方程只是给数字信号滤波器提供运算规则,使其按照这个规则完成对输入数据的处理。时域离散系统的频域特性:Y(eωj)=X(eωj)H(eωj) 其中Y(eωj)、X(eωj)分别是数字滤波器的输出序列和输入序列的频域特性(或称为
本科毕业(论文) 题 目 (中、英文 ) in The Signal System 分类 号 学号 密级 公开 学校代码 1107044431 TN911.6 基于MATLAB 的信号系统仿真及应用 The Application of MATLAB in The Signal System 工科 作者姓名 指导教师 学科门类 专业名称 电气工程及其自动化 提交论文日期 成绩评定 二零一五年五月
摘要 当前的科学信息技术正在日新月异的高速发展,而通过应用数字信号处理的方法,已成为一个非常重要的技术手段被广泛应用在通信、音频和图像、遥感,视频等领域。为了更好地了解信号与系统的基本理论和掌握其方法,从而更好地理解和掌握数字信号处理的理论知识,因此在实验过程中我们就需要通过MATLAB 计算机辅助设计平台。 本论文主要探究MATALB在信号与系统中的连续信号和离散信号中的应用,主要从连续和离散两方面入手,进一步掌握信号系统中的相关知识。同时引进计算机软件—MATLAB,对信号系统二阶系统的时域和频域分析,通过它在计算机上对程序进行仿真,阐述信号与系统理论应用与实际相联系。以此激发学习兴趣,变被动接受为主动探知,从而提升学习效果,培养主动思维,学以致用的思维习惯,也可以让人们进一步了解MATLAB软件 关键词:采样定理;MATLAB;信号与系统;抽样定理
Abstract Current, the rapid development of science and information technology are changing and through the application of digital signal processing method, has become a very important technology is widely used in communication, audio and video, remote sensing, video, etc. In order to better understand the basic theory of signal and system, and grasp the method, to better understand and master the theoretical knowledge of digital signal processing, so we need in the process of experiment by MATLAB computer aided design platform. This thesis mainly explores MATALB in signal and system, the application of discrete and continuous signals, mainly from the two aspects of the continuous and discrete, further to master relevant knowledge of signal system. Introduction of computer software - MATAB at the same time, the signal system of second order system time domain and frequency domain analysis, through its d on program on computer simulation, signal and system theory associated with the actual application. To stimulate interest in learning, change passive accept to active detection, so as to improve learning effect, active thinking, to practice habits of thinking, also can let people learn more about MATLAB software. Key words:Sampling theorem; MATLAB; Signals and systems; The sampling theorem
一、 控制系统的模型与转换 1. 请将下面的传递函数模型输入到matlab 环境。 ]52)1)[(2(24)(322 33++++++=s s s s s s s G ) 99.02.0)(1(568 .0)(22+--+=z z z z z H ,T=0.1s >> s=tf('s'); G=(s^3+4*s+2)/(s^3*(s^2+2)*((s^2+1)^3+2*s+5)); G Transfer function: s^3 + 4 s + 2 ------------------------------------------------------ s^11 + 5 s^9 + 9 s^7 + 2 s^6 + 12 s^5 + 4 s^4 + 12 s^3 >> num=[1 0 0.56]; den=conv([1 -1],[1 -0.2 0.99]); H=tf(num,den,'Ts',0.1) Transfer function: z^2 + 0.56 ----------------------------- z^3 - 1.2 z^2 + 1.19 z - 0.99 2. 请将下面的零极点模型输入到matlab 环境。请求出上述模型的零极点,并绘制其位置。 )1)(6)(5()1)(1(8)(22 +++-+++=s s s s j s j s s G ) 2.8() 6.2)(2.3()(1 511-++=----z z z z z H ,T=0.05s >>z=[-1-j -1+j]; p=[0 0 -5 -6 -j j]; G=zpk(z,p,8) Zero/pole/gain: 8 (s^2 + 2s + 2) -------------------------- s^2 (s+5) (s+6) (s^2 + 1) >>pzmap(G)
实验目录 实验一:Matlab环境熟悉与基本运算(设计型)实验二:Matlab语言程序设计(设计型) 实验三:控制系统模型的建立(设计型) 实验四:Simulink仿真入门(验证型) 实验五:控制系统时域仿真分析(设计型) 实验六:Simulink环境下时域仿真 实验七:控制系统根轨迹仿真分析 实验八:控制系统频域仿真分析(设计型)
1、矩阵运算(1)矩阵的乘法 A=[1 2;3 4]; B=[5 5;7 8]; y=A^2*B y = 105 115 229 251 (2)矩阵除法 A=[1 2 3;4 5 6;7 8 9]; B=[1 0 0;0 2 0;0 0 3]; y1=A\B 警告: 矩阵接近奇异值,或者缩放错误。结果可能不准确。RCOND = 1.541976e-18。y1 = 1.0e+16 * -0.4504 1.8014 -1.3511 0.9007 -3.6029 2.7022 -0.4504 1.8014 -1.3511 y2=A/B y2 = 1.0000 1.0000 1.0000 4.0000 2.5000 2.0000 7.0000 4.0000 3.0000 (3)矩阵的转置及共轭转置 A=[5+i,2-i,1;6*i,4,9-i]; y1=A.' y1 = 5.0000 + 1.0000i 0.0000 + 6.0000i 2.0000 - 1.0000i 4.0000 + 0.0000i 1.0000 + 0.0000i 9.0000 - 1.0000i y2=A' y2 = 5.0000 - 1.0000i 0.0000 - 6.0000i 2.0000 + 1.0000i 4.0000 + 0.0000i 1.0000 + 0.0000i 9.0000 + 1.0000i 实验名称:Matlab环境熟悉与基本运算(设计型)
天津理工大学计算机与通信工程学院通信工程专业设计说明书 基于Matlab/Simulink 的AM通信系统仿真设计与研究 姓名杜艳玮 学号 20092177 班级 09通信-2 指导老师赵健 日期2012/12/16
目录 摘要 (3) 第一章前言 (4) 1.1专业设计任务及要求 (4) 1.2 Matlab简介 (4) 1.4 通信系统模型 (6) 第二章 AM调制原理及仿真 (7) 2.1 AM调制原理 (7) 2.1.1 AM介绍 (7) 2.1.2 AM调制原理框图 (8) 2.2 AM调制方式的Matlab仿真 (8) 2.2.1 载波信号分析 (8) 2.2.2 AM调制 (9) 2.3 AM调制方式Matlab-simulink仿真 (10) 2.3.1 仿真框图 (10) 2.3.2 仿真结果 (11) 第三章 AM解调 (13) 3.1 AM解调原理 (13) 3.2 AM解调方式Matlab仿真 (13) 3.2.1 滤波前AM解调信号波形 (13) 3.2.2 AM调制信号解调 (15) 3.3 AM解调方式的Matlab-simulink仿真 (17) 3.3.1 仿真框图 (17) 3.3.2 仿真结果 (18) 第四章结论 (19) 参考文献 (20)
摘要 学习AM调制原理,AM调制就是由调制信号去控制高频载波的幅度,使之随调制信号作线性变化的过程。在波形上,幅度已调信号的幅度随基带信号的规律而呈正比地变化。解调方法利用相干解调。解调就是实现频谱搬移,通过相乘器与载波相乘来实现。通过相干解调,通过低通滤波器得到解调信号。相干解调时,接收端必须提供一个与接受的已调载波严格同步的本地载波,它与接受的已调信号相乘后,经低通滤波器取出低频分量,得到原始的基带调制信号。通过信号的功率谱密度的公式,得到功率谱密度。利用Matlab和Matlab-Simulink仿真建立AM调制的通信系统模型,用Matlab仿真程序画出调制信号、载波、已调信号、相干解调之后信号的波形以及功率频谱密度,分析所设计系统性能。用Matlab-Simulink仿真建立基于相干解调的AM仿真模型,详细叙述模块参数的设置,分析仿真结果。 关键字:AM调制相干解调 Matlab仿真 Matlab-Simulink仿真
综合训练① 实验内容:利用matlab绘制频率自定的正弦信号(连续时间和离散时间),复指数信号(连续时间),并举例实际中哪些物理现象可以用正弦信号,复指数信号来表示。绘制成谐波关系的正弦信号(连续时间和离散时间),分析其周期性和频率之间的关系。实验步骤: 一、绘制谐波关系的正弦信号 分析:由于正弦信号可以表示成两个共轭的复指数信号相减,然后再除去两倍的单位虚数得到,故,我们将正弦信号设置为 X=exp(j*pi*n/4)-exp(-j*pi*n/4))/(2*j) 此信号就相当于 x=sin(pi*n/4) 设计程序如下: n=[0:32]; %设置n的取值 x=(exp(j*pi*n/4)-exp(-j*pi*n/4))/(2*j); %限定离散正弦信号 stem(n,x) %绘制该离散正弦信号 通过Matlab所得图形如下:
分析:同样的连续型的正弦信号同样也可以用类似方式绘制. x=sym('(exp(j*pi*t/T)+exp(-j*pi*t/T))/2');%函数表示正弦信号 x5=subs(x,5,'T'); %设置周期大小ezplot(x5,[0,10]) %绘制图形 所得结果如下:
二、绘制复指数信号 分析:由于复指数信号有实数部分和虚数部分,所以绘制其图形,我们采取了分别绘制的方法,将实数和虚数分别画出。 实验程序如下: t=[0:.01:10]; %产生时间轴的等差点 y=exp((1+j*10)*t); %设置复指数信号 subplot(211),plot(t,real(y)); %绘制实数信号图形 grid subplot(212),plot(t,imag(y)); %绘制虚数部分图形 grid 实验所得结果如下:
《MATLAB与控制系统仿真》 实验报告 班级: 学号: 姓名: 时间:2013 年 6 月
目录实验一 MATLAB环境的熟悉与基本运算(一)实验二 MATLAB环境的熟悉与基本运算(二)实验三 MATLAB语言的程序设计 实验四 MATLAB的图形绘制 实验五基于SIMULINK的系统仿真 实验六控制系统的频域与时域分析 实验七控制系统PID校正器设计法 实验八线性方程组求解及函数求极值
实验一 MATLAB环境的熟悉与基本运算(一) 一、实验目的 1.熟悉MATLAB开发环境 2.掌握矩阵、变量、表达式的各种基本运算 二、实验基本原理 1.熟悉MATLAB环境: MATLAB桌面和命令窗口、命令历史窗口、帮助信息浏览器、工作空间浏览器、文件和搜索路径浏览器。 2.掌握MA TLAB常用命令 表1 MA TLAB常用命令 3.MATLAB变量与运算符 3.1变量命名规则 3.2 MATLAB的各种常用运算符 表3 MATLAB关系运算符 表4 MATLAB逻辑运算符
| Or 逻辑或 ~ Not 逻辑非 Xor 逻辑异或 符号功能说明示例符号功能说明示例 :1:1:4;1:2:11 . ;分隔行.. ,分隔列… ()% 注释 [] 构成向量、矩阵!调用操作系统命令 {} 构成单元数组= 用于赋值 4.MATLAB的一维、二维数组的寻访 表6 子数组访问与赋值常用的相关指令格式 三、主要仪器设备及耗材 计算机 四.实验程序及结果 1、新建一个文件夹(自己的名字命名,在机器的最后一个盘符) 2、启动MATLAB,将该文件夹添加到MATLAB路径管理器中。 3、学习使用help命令。
实验一 用MATLAB 处理线性系统数学模型 [说明] 一个控制系统主要由被控对象、测量装置、控制器和执行器四大部分构成。MATLAB 软件的应用对提高控制系统的分析、设计和应用水平起着十分重要的作用。采用MATLAB 软件仿真的关键问题之一是在MATLAB 软件平台上怎样正确表示被控对象的数学模型。 [实验目的] 1.了解MATLAB 软件的基本特点和功能; 2.掌握线性系统被控对象传递函数数学模型在MATLAB 环境下的表示方法及转换; 3.掌握多环节串联、并联、反馈连接时整体传递函数的求取方法; 4. 掌握在SIMULINK 环境下系统结构图的形成方法及整体传递函数的求取方法; 5.了解在MATLAB 环境下求取系统的输出时域表达式的方法。 [实验指导] 一、被控对象模型的建立 在线性系统理论中,一般常用的描述系统的数学模型形式有: (1)传递函数模型——有理多项式分式表达式 (2)传递函数模型——零极点增益表达式 (3)状态空间模型(系统的内部模型) 这些模型之间都有着内在的联系,可以相互进行转换。 1、传递函数模型——有理多项式分式表达式 设系统的传递函数模型为 111011 1......)()()(a s a s a s a b s b s b s b s R s C s G n n n n m m m m ++++++++= =---- 对线性定常系统,式中s 的系数均为常数,且a n 不等于零。 这时系统在MATLAB 中可以方便地由分子和分母各项系数构成的两个向量唯一地确定,这两个向量常用num 和den 表示。 num=[b m ,b m-1,…,b 1,b 0] den=[a n ,a n-1,…,a 1,a 0]
倒立摆系统的建模及Matlab 仿真 1.系统的物理模型 考虑如图(1)面内运动的二维问题。 图(1)倒立摆系统 假定倒立摆系统的参数如下。 摆杆的质量:m=0.1g 摆杆的长度:l =1m 小车的质量: M=1kg 重力加速度:g=9.8m/2s 摆杆的质量在摆杆的中心。 设计一个控制系统,使得当给定任意初始条件(由干扰引起)时,最大超调量δ ≤10%,调节时 间ts ≤4s ,通过小车的水平运动使倒立摆保持在垂直位置。 2.系统的数学模型 2.1建立倒置摆的运动方程并将其线性化。 为简化问题,在数学模型中首先假设:1)摆杆为刚体;2)忽略摆杆与支点之间的摩擦;3)忽略小车与接触面间的摩擦。 设小车瞬时位置为z,摆心瞬时位置为(θsin l z +),在u 作用下,小车及摆均产生加速远动,根据牛顿第二定律,在水平直线远动方向的惯性力应与u 平衡,于是有 u l z dt d m dt z d M =++)sin (22 22θ 即: u ml ml z m M =-++θθθθsin cos )(2&&&&& ① 绕摆轴转动的惯性力矩与重力矩平衡,因而有
θθθsin cos )sin (22mgl l l z dt d m =??? ????+ 即: θθθθθθθsin cos sin cos cos 22g l l z =-+&&&&& ② 以上两个方程都是非线性方程,为求得解析解,需作线性化处理。由于控制的目的是保持倒立摆直 立,在试驾合适的外力条件下,假定θ很小,接近于零时合理的,则1cos ,sin ≈≈θθθ,且可忽略θ θ2&项。于是有 u ml z m M =++θ&&&& )( ③ θθg l z =+&&&& ④ 联立求解可得 u Ml Ml m M u M M mg z 1)(1 -+=+- =θθθ&&&& 2.2列写系统的状态空间表达式。 选取系统变量4321,,,x x x x , []T x x x x x 4321,,,=则 u Ml x Ml m M x x x u M x M mg x x x 1 )(134433221-+= =+-==&&&& 即 []Cx x x y Bu Ax u Ml M x Ml g m M M mg z z dt d x ===+=?????? ? ???????-+?????????? ??? ? +- =???? ????????=000110100)(0 010 0000000 1 1θθ&&& 代入数据计算得到: [][]0,0001,1010,01100 1000010000 1 0==-=? ? ??? ? ??? ???-=D C B A T
基于matlab的模拟信号数字化仿真 作者:李亚琼 学号:1305160425
摘要 本文研究的主要内容模拟信号数字化Matlab软件仿真。若信源输出的是模拟信号,如电话传送的话音信号,模拟摄像机输出的图像信号等,若使其在数字信道中传输,必须在发送端将模拟信号转换成数字信号,即进行A/D变换,在接收端则要进行D/A变换。模拟信号数字化由抽样、量化、编码三部分组成。由于数字信号的传送具有稳定性好,可靠性高,方便传送和传送等诸多优点,使得被广泛应用到各种技术中。不仅如此,Matlab仿真软件是常用的工具之一,可用于通信系统的设计和仿真。在科研教学方面发挥着重要的作用。Matlab有诸多优点,编程简单,操作容易、处理数据迅速等。 本文主要阐述的是模拟信号数字化的理论基础和实现方法。利用Matlab提供的可视化工具建立了数字化系统的仿真模型,详细讲述了抽样、量化、编码的设计,并指出了在仿真建模中要注意的问题。在给定的仿真条件下,运行了仿真程序,得到了预期的仿真结果。 关键词:Matlab、模拟信号数字化、仿真 1.1基本原理 模拟信号的数字传输是指把模拟信号先变换为数字信号后,再进行传输。由于与模拟传输相比,数字传输有着众多优点,因而此技术越来越受到重视。此变化成为A/D变换。A/D变换是把模拟基带信号变换喂数字基带信号,尽管后者的带宽会比前者大得很多,但本质上仍属于基带信号。这种传输可直接采用基带传输,或经过熟悉调制后再做频带传输。A/D变化包括抽样、量化、编码三个步骤,如图。 图1.模拟信号数字化 1.1.1抽样定理 抽样就是把模拟信号在时间上的连续变成离散的抽样值。而能不能用这一系列抽样值重新恢复原信号,就需要抽样定理来解决了。所以说,如果我们要传输模拟信号,可以通过传输抽样定理的抽样值来实现而不是非要传输原本的模拟信号。模拟信号数字化的理论基础就是抽样定理,抽样定理的作用不言而喻。 抽样定理:设时间连续信号) f,其最高截止频率为m f,如果用时间间 (t
MATLAB及 控制系统仿真 实验 班级:智能0702
姓名:刘保卫 学号: 06074053(18) 实验四控制系统数学模型转换及MATLAB实现 一、实验目的 熟悉MATLAB 的实验环境。 掌握MATLAB 建立系统数学模型的方法。 二、实验内容 (注:实验报告只提交第2 题) 1、复习并验证相关示例。 (1)系统数学模型的建立 包括多项式模型(Transfer Function,TF),零极点增益模型(Zero-Pole,ZP),状态空间模型 (State-space,SS); (2)模型间的相互转换 系统多项式模型到零极点模型(tf2zp),零极点增益模型到多项式模型(zp2tf),状态空间模 型与多项式模型和零极点模型之间的转换(tf2ss,ss2tf,zp2ss…); (3)模型的连接 模型串联(series),模型并联(parallel),反馈连接(feedback) 2、用MATLAB 做如下练习。 (1)用2 种方法建立系统的多项式模型。 程序如下: %建立系统的多项式模型(传递函数) %方法一,直接写表达式 s=tf('s') Gs1=(s+2)/(s^2+5*s+10) %方法二,由分子分母构造 num=[1 2]; den=[1 5 10]; Gs2=tf(num,den) figure pzmap(Gs1) figure pzmap(Gs1) grid on 运行结果:
易知两种方法结果一样 Transfer function: s Transfer function: s + 2 -------------- s^2 + 5 s + 10 Transfer function: s + 2 -------------- s^2 + 5 s + 10 (2)用2 种方法建立系统的零极点模型和多项式模型。 程序如下: %方法一 s=tf('s') Gs1=10*(s+1)/((s+1)*(s+5)*(s+10)) % zpk模型 ZPK=zpk(Gs1) %方法二 % tf模型 num=[10 10]; den=conv([1 1],conv([1 5],[1 10])); Gs2=tf(num,den) % zpk模型 ZPK=zpk(Gs2) figure pzmap(Gs1) figure pzmap(Gs1) grid on 运行结果: 易知两种方法结果一样 Transfer function: s Transfer function: