我们一般采用高速输出信号控制步进电机和伺服电机做位置,角度和速度的控制,比如定位,要实现这个目的,我们要知道这几个条件:1、PLC高速输出需要晶体管输出,继电器属于机械动作,反应缓慢,而且易坏
2、以三菱PLC为例,高速输出口采用Y0 、Y1
3、高速输出指令常用的有
PLSY 脉冲输出
PLSR 带加减速
PLSV……可变速的脉冲输出
ZRN……原点回归
DRVI……相对定位
DRVA……绝对定位
4、脉冲结束标志位M8029
5、D8140 D8141 为Y0总输出脉冲数
6、在同一个程序里面Y0做为脉冲输出,程序可以存在一次,当需要多次使用的时候,可以采用变址V进行数据的切换,频率,脉冲在不同的动作模式中,改变数据
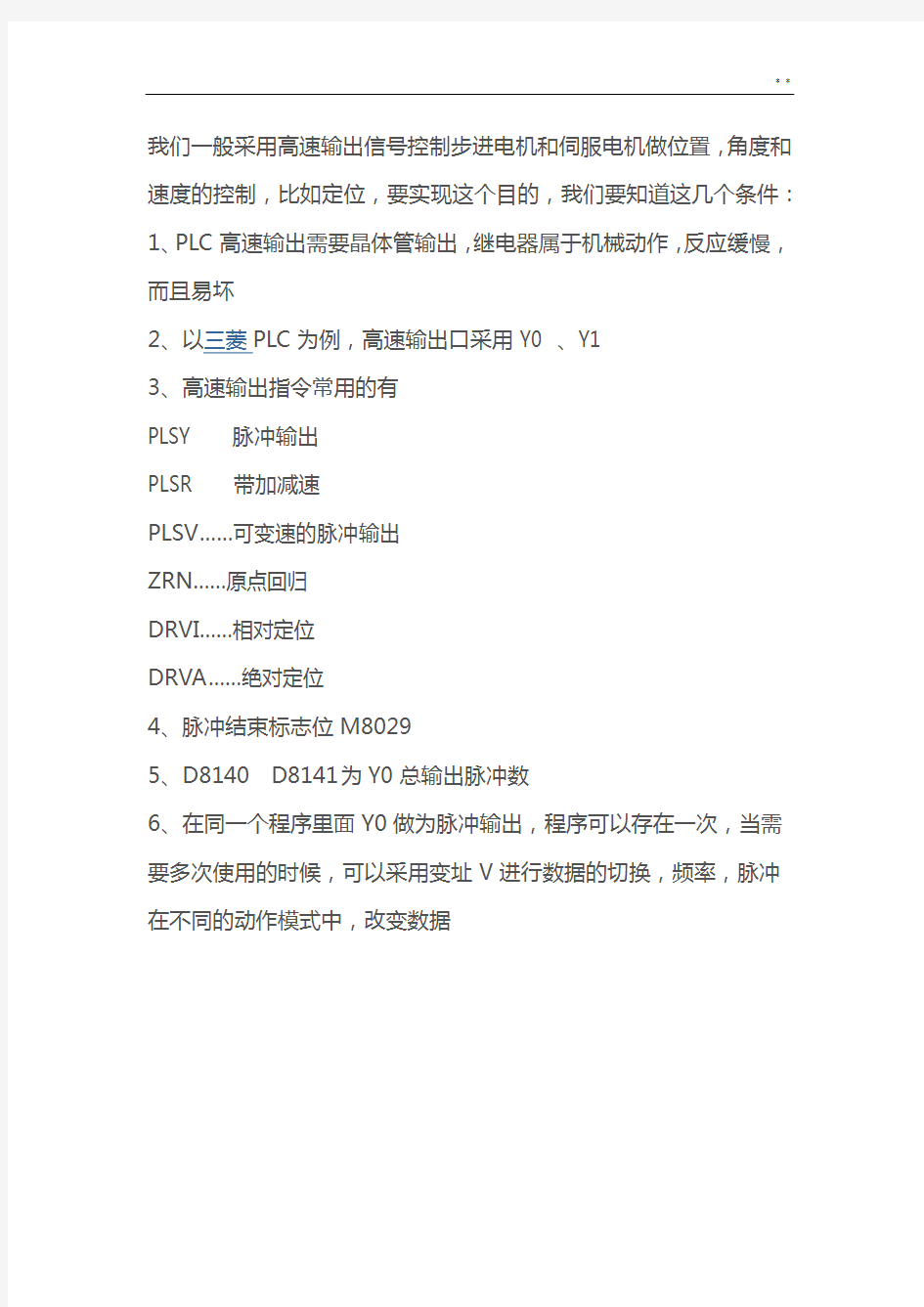
正对上述讲解的内容:我们用一个程序来表示若我们以后可能接触步进。伺服这一块,上述内容,大家一定要熟练掌握!
23、PLC编程实现编码器的脉冲计数
在高速计数器与编码器配合使用之前,我们首先要知道是单向计数,还是双向计数,需要记录记录的数据,需要多少个编码器,在PLC 中也需要多少个高速输入点,我们先要确认清楚。
当我们了解上面的问题以后,参照上题的寄存器分配表得知我们该选择什么高速计数器
如:现在需要测量升降机上升和下降的高度,那么我们需要采用双向编码器,即可加可减的,AB相编码器,PLC需要两个IO点,查表
得知,X0 X1为一路采用C251高速计数器那么我们可以这样编程,如图
开机即启动计数,上升时(方向),C251加计数
下降时(方向),C251减计数
我们要求编码器转动的数据达到多少时,就表示判断实际升降机到达的位置
注意:在整个程序中没有出现X0、X1这个两个软元件?
是因为C251为X0、X1的内置高速计数器,他们是一一对应的,只要见到c251,X0 X1就在里面了,当然,用了C251以后,X 0 、X1不能在程序里面再当做开关量使用了
接线参照下图
21、我们对高速计数器的理解及编程
相对11题定时器和计数器来说,本题目主要是告诉大家学习高数处理的功能
PLC内部高速计时器是计数器功能的扩展,高速计数器指令与定位指令使PLC的应用范围从逻辑控制、模拟量控制扩展到了运动控制领域。
特点:其最大的特点就是执行的过程中不受PLC的扫描周期影响,而是按照中断方式工作,并且立即输出。
之前的题目中,我们说过内部信号计数器,它可以对编程元件X、Y、M、S、T、C信号进行计数。当X信号计数时,要求X的断开和接通一次时间应大于PLC的扫描周期,否则会出现丢步的现象,如果PLC的扫描周期为40ms,则一秒里X的信号频率最高位25HZ。这么低的速度限制了PLC的高速应用范围,如编码器,可以达到10000HZ。(编码器后面会讲到)
我们看高速计数器,可以先参照下面表格
图片出处:三菱FX编程手册
U:增计数输入;D:减计数输入;A:A相输入;B:B相输入;R:复位输入;S:启动输入;
一般不同型号的PLC,可能对应高速计数器的点位控制不一样,首先满足硬件功能。然后在软件上进行实现,两者缺一不可
图片出处:三菱编程手册
我们现在说说高速计数器与普通计数器的区别:
1、高速计数器相对于普通计数器,不受扫描周期的影响,但是,速度还是有限制的。
2、多个高速计数输入口,和对应的高速计数器不是任意选择的,由上表得知,他们是一一对应的
3、所有高速计数器均为停电保持型,题当前值和出点状态在停电时都会保持停电前的状态,也可以利用参数设定为非停电保持型。
4、作为高速计数器的高速输入信号,建议使用电子开关信号,而不要使用机械开关触点信号,由于机械触点的振动会引起信号输入误差,从而影响到正确计数。
考考大家的理解能力
看了上图,再看后面的内容,我们会不会对高速计数器又一步加深理
解
22、编码器的原理、与PLC的接线方式
编码器是产生脉冲反馈给PLC的检测装置,一般用来检测外围设备走的距离和速度,我们常见的检测位置的元件有:
光电编码器、光栅编码器;(最常用)
感应同步器、磁栅编码器、容栅编码器;(10年前的产品)
电位器;(30多年前的产品)
激光干涉仪、机器视觉系统。(高精度、高成本)
旋转式光电编码器
原理:光电编码器,是通过光电转换将输入轴上机械几何位移量转换
成脉冲数字量的传感器。光电编码器是有码盘和光电检测装置组成。
码盘是在一定直
径的透明圆板上等分的印制了若干个细长线,如图,经发光二极管等
电子元件组成的检测装置
检测脉冲输出信号,即可测量编码器输入轴的转角。
通过计算单位时间编码器输出脉冲的个数就能计算出输入轴的转速。
增量式编码器:
增量式编码器是直接利用光电转换原理输出三组方波脉冲: A、B和Z;A 、差90度,以判断旋转方向,如下图所示。
增量式编码器特点:
l 构造简单,
l 机械寿命长,
l 抗干扰能力强,可靠性高;
l 缺点是无法输出轴转动角的绝对位置。
绝对式编码器:
绝对编码器是直接输出数字量的传感器,在它的圆形码盘上沿径向有若干同心码道,每条道上由透光和不透光的扇形区相间组成,相邻码道的扇区数目是双倍关系,码盘上的码道数就是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。这种编码器的特点是不要计数器,在转轴的任意位置
都可读出一个固定的与位置相对应的数字码。显然,码道越多,分辨率就越高,对于一个具有N位二进制分辨率的编码器,其码盘必须有N条码道。
特点:
1.可以直接读出角度坐标的绝对值;
2.没有累积误差;
3.电源切除后位置信息不会丢失。
4.有10位、14位、16位等品种。
s高速脉冲计数器及 P T O和P W M Document serial number【NL89WT-NY98YT-NC8CB-NNUUT-NUT108】
高速脉冲计数器 高速计数器专用输入 高速计数器使用的输入 HSC0 , , HSC1 , , , HSC2 , , , HSC3 HSC4 , , HSC5 有些高速计数器和边缘中断的输入点赋值存在某些重叠。同一个输入不能用于两种不同的功能;但是高速计数器当前模式未使用的任何输入均可用于其他目的。例如,如果在模式2中使用HSC0,模式2使用和,则可用于边缘中断或用于HSC3。 如果所用的HSC0模式不使用输入,则该输入可用于HSC3或边缘中断。与此相似,如果所选的HSC0模式不使用,则该输入可用于边缘中断;如果所选HSC4模式不使用,则该输入可用于HSC5。 请注意HSC0的所有模式均使用,HSC4的所有模式均使用,因此当使用这些计数器时,这些输
(仅限正交计数器)。这些控制位位于各自计数器的控制字节内,只在执行HDEF指令时才使用。 执行HDEF指令之前,必须将这些控制位设为所需的状态,否则计数器采用所选计数器模式的默认配置。复原输入和起始输入的默认设置为现用水平高,正交计数速率为4x(或4乘以输入时钟频率)。一旦执行了HDEF指令,就不能再改变计数器设置,除非首先将CPU设为STOP(停止)模式。 ** 率)。 定义控制字节 一旦定义了计数器和计数器模式,您就可以为计数器动态参数编程。每台高速计数器均有一个控制字节,允许完成以下作业: * 启用或禁止计数器 * 控制方向(仅限模式0、1和2)或初始化所有其他模式的计数方向 * 载入当前值 每台高速计数器都有一个32位初始值和一个32位预设值,初始值和预设值均为带符号的整数值。欲向高速计数器载入新的初始值和预设值,您必须设置包含初始值和/或预设值的控制字节及特殊内存字节。然后您必须执行HSC指令,将新数值传输至高速计数器。下表说明用于包含新当前值和预设值的特殊内存字节。
实验四:时序逻辑电路(集成寄存器和计数器) 一、实验目的: 1.熟悉中规模集成计数器的逻辑功能和使用方法;掌握用集成计数器组成任意模数为M的计数器。 2.加深理解移位寄存器的工作原理及逻辑功能描述;熟悉中规模集成移位寄存器的逻辑功能和使用方法;掌握用移位寄存器组成环形计数器的基本原理和设计方法。 二、知识点提示和实验原理: ㈠计数器: 计数器的应用十分广泛,不仅可用来计数,也可用于分频、定时和数字运算。计数器种类繁多,根据计数体制不同,计数器可分为二进制计数器和非二进制计数器两大类。在非二进制计数器中,最常用的是十进制计数器,其他的称为任意进制计数器。根据计数器的增减趋势的不同,计数器可分为加法计数器和减法计数器。根据计数脉冲引入方式不同,计数又可分为同步计数器和异步计数器。 在实际工程应用中,一般很少使用小规模的触发器组成计数器,而是直接选用中规模集成计数器。 用集成计数器实现任意M进制计数器:一般情况任意M进制计数器的结构分为3类,第一种是由集成二进制计数器构成,第二种为移位寄存器构成的移位寄存型计数器,第三种为集成触发器构成的简单专用计数器。 当M较小时通过对集成计数器的改造即可以实现,当M较大时,可通过多片计数器级联实现。 实现方法:(1)当所需计数器M值小于集成计数器本身二进制计数最大值时,用置数(清零)法构成任意进制计数器;⑵当所需计数器M值大于集成计数器本身二进制计数最大值时,可采用级联法构成任意进制计数器。 常用的中规模集成器件:4位二进制计数器74HC161,十进制计数器74HC160,加减计数器74HC191、74HC193,异步计数器74LS290。所有芯片的电路、功能表见教材。 ㈡寄存器: 寄存器用来寄存二进制信息,将一些待运算的数据、代码或运算的中间结果暂时寄存起来。按功能划分,寄存器可分为数码寄存器和移位寄存器两大类。 数码寄存器用来存放数码,一般具有接收数码、保持并清除原有数码等功能,电路结构和工作原理郡比较简单。而移位寄存器除具有存放数码的功能以外,还具备将寄存的数码实现移位的功能,即在时钟脉冲CLK作用下,能够把寄存器中存放的数码依次左移或右移。由于将二进制数左移一位等于乘2。右移一位等于除2,因此,移位寄存器可用于二进制数的乘、除运算。按照所存放数码的输入、输出方式的不同,移位寄存器可有四种工作方式:串行输入、串行输出,串行输入、并行输出,并行输入、串行输出,并行输入、并行输出。 中规模集成4位双向移位寄存器74HC194 ,具有左移、右移、置数、保持和清除功能。74HC194的功能见教材。
环形计数器是由移位寄存器加上一定的反馈电路构成的,用移位寄存器构成环形计数器的一般框图见图23-5-1,它是由一个移位寄存器和一个组合反馈逻辑电路闭环构成,反馈电路的输出接向移位寄存器的串行输入端,反馈电路的输入端根据移位寄存器计数器类型的不同,可接向移位寄存器的串行输出端或某些触发器的输出端。 图23-5-1 移位寄存器型计数器方框图 23.5.1 环形计数器 23.5.1.1 电路工作原理 图23-5-2为一个四位环形计数器,它是把移位寄存器最低一位的串行输出端Q1反馈到最高位的串行输入端(即D触发器的数据端)而构成的,环形计数器常用来实现脉冲顺序分配的功能(分配器)。 假设寄存器初始状态为[Q4Q3Q2Q1]=1000,那么在移位脉冲的作用下,其状态将按表23-11 中的顺序转换。 当第三个移位脉冲到来后,Q1=1,它反馈到D4输入端,在第四个移位脉冲作用下Q4=1,回复到初始状态。表23-11中的各状态将在移位脉冲作用下,反复在四位移位寄存器中不断循环。
由上述讲讨论可知,该环形计数的计数长度为N=n。和二进制计数器相比,它有2n-n个状态没有利用,它利用的有效状态是少的。 23.5.1.2 状态转换图和工作时序 表23-11中是以1000为初始状态的,它所对应的状态转换图见图23-5-3。如果移位寄存器中的初始状态不同,就会有不同的状态转换图。图23-5-4给出了四位环形计数器可能有的其它几种状态转换图。 图23-5-3 状态转换图 (a) (b) (c) (d) 图23-5-4 四位环行计数器其它的状态转换图 图23-5-4(a)、(b)、(c)三个状态转换图中各状态是闭合的,相应的时序为循环时序。当计数器处于图23-5-4(d)所示的状态0000或1111时,计数器的状态将不发生变化。这两个状态称为悬态或死态。 四位环形计数器可能有这么多不同的循环时序,是我们不希望的,只能从这些循环时序中选出一个来工作,这就是工作时序,或称为正常时序,或有效时序。其它末被选中的循环时序称为异常时序或无效时序。一般选图23-5-3的时序为工作时序,因为它只循环一个“1”,不用经过译码就可从各触发器的Q端得到顺序脉冲输出,参看图23-5-5。
实验九脉冲计数(定时/计数器实验) 1、实验目的:熟悉单片机内部定时/计数器功能,掌握初始化编程方法。 2、实验内容:把定时器0外部输入的脉冲进行计数,并送显示器显示 3、实验程序框图: 4、实验接线图:
5、实验步骤:P3.4 依次接T0~T7或单脉冲输出孔,执行程序,观察数码管上 计数脉冲的速度及个数。 6、思考:修改程序使显示器上可显示到999999个脉冲个数。 7、程序清单文件名:SW09.ASM;脉冲计数实验 ORG 0000H LJMP SE15 ORG 06E0H SE15: MOV SP,#53H MOV P2,#0FFH MOV A,#81H MOV DPTR,#0FF23H MOVX @DPTR,A ; 1 MOV TMOD,#05H MOV TH0,#00H MOV TL0,#00H SETB TR0 LO29: MOV R2,TH0 MOV R3,TL0 LCALL ZOY0 MOV R0,#79H MOV A,R6 LCALL PTDS MOV A,R5 LCALL PTDS MOV A,R4 LCALL PTDS LCALL SSEE SJMP LO29 ZOY0: CLR A MOV R4,A MOV R5,A MOV R6,A MOV R7,#10H LO30: CLR C MOV A,R3 RLC A MOV R3,A MOV A,R2 RLC A MOV R2,A MOV A,R6 ADDC A,R6 DA A MOV R6,A MOV A,R5 ADDC A,R5 DA A MOV R5,A MOV A,R4 ADDC A,R4 DA A MOV R4,A DJNZ R7,LO30 RET PTDS: MOV R1,A
高速脉冲计数器 高速计数器专用输入 高速计数器使用的输入 HSC0 I0.0, I0.1, 0.2 HSC1 I0.6, I0.7, I1.0, I1.1 HSC2 I1.2, I1.3, I1.4, I1.5 HSC3 I0.1 HSC4 I0.3, I0.4, I0.5 HSC5 I0.4 有些高速计数器和边缘中断的输入点赋值存在某些重叠。同一个输入不能用于两种不同的功能;但是高速计数器当前模式未使用的任何输入均可用于其他目的。例如,如果在模式2中使用HSC0,模式2使用I0.0和I0.2,则I0.1可用于边缘中断或用于HSC3。 如果所用的HSC0模式不使用输入I0.1,则该输入可用于HSC3或边缘中断。与此相似,如果所选的HSC0模式不使用I0.2,则该输入可用于边缘中断;如果所选HSC4模式不使用I0.4,则该输入可用于HSC5。 请注意HSC0的所有模式均使用I0.0,HSC4的所有模式均使用I0.3,因此当使用这些计数器时,这些输入点绝不会用于其他用途。
四台计数器有三个控制位,用于配置复原和起始输入的激活状态并选择1x或4x计数模式(仅限正交计数器)。这些控制位位于各自计数器的控制字节内,只在执行HDEF指令时才使用。 执行HDEF指令之前,必须将这些控制位设为所需的状态,否则计数器采用所选计数器模式的默认配置。复原输入和起始输入的默认设置为现用水平高,正交计数速率为4x(或4乘以输入时钟频率)。一旦执行了HDEF指令,就不能再改变计数器设置,除非首先将CPU设为STOP(停止)模式。 下表复位和启动输入的有效电平以及1x/4x控制位
**缺省设置为:复位输入和启动输入高电平有效,正交计数率为四倍速(四倍输入时钟频率)。 定义控制字节 一旦定义了计数器和计数器模式,您就可以为计数器动态参数编程。每台高速计数器均有一个控制字节,允许完成以下作业: * 启用或禁止计数器 * 控制方向(仅限模式0、1和2)或初始化所有其他模式的计数方向 * 载入当前值 通过执行HSC指令可激活控制字节以及相关当前值和预设值检查。下表说明每个控制位。
实验四4 位计数器设计 1. 实验目的 学习quartusii 和modelsim 的使用方法; 学习原理图和veriloghdl 混合输入设计方法; 掌握4位计数器设计的设计及仿真方法。 2. 实验原理 设计其中的计数器模块CNT4E和数码管译码驱动模块DECL7S勺verilogHDL代码,并作出整个系统仿真。 2.1 4位计数器模块代码 module CNT4B(out, CLK, RST); // output out; // in put CLK, RST; // reg [3:0] out; // always (posedge CLK or n egedge RST) // begin if(!RST) // out <= 4'dO; else out <= out + 1; // end en dmodule 低电平复位 每一个clk计数 效果图: 定义模块名和各个端口 定义输出端口 定义输入时钟和复位 定义四位计数器 上升沿时钟和下降沿复位
2.2七段数码管代码 module segled(out1,a); // in put [3:0]a; // output [6:0]out1; // reg [6:0]out1; //reg always(a) // begin case(a) //case 4'b0000:out1<=7'b0111111; 4'b0001:out1<=7'b0000110; 4'b0010:out1<=7'b1011011; 4'b0011:out1<=7'b1001111; 4'b0100:out1<=7'b1100110; 4'b0101:out1<=7'b1101101; 4'b0110:out1<=7'b1111101; 4'b0111:out1<=7'b0000111; 4'b1000:out1<=7'b1111111; 4'b1001:out1<=7'b1101111; 4'b1010:out1<=7'b1110111; 4'b1011:out1<=7'b1111100; 4'b1100:out1<=7'b0111001; 4'b1101:out1<=7'b1011110; 4'b1110:out1<=7'b1111001; 4'b1111:out1<=7'b1110001; endcase end en dmodule // 模 块结束效果图: 定义模块名和输入输出端口 输入一个3位矢量 输出一个6位矢量 型变量用于always语句 语句用于选择输出 CNT4B:b2v inst 敏感信号a
目录 摘要:单片机是一种集成在电路芯片,是采用超大规模集成电路技术把具有数据处理能力的中央处理器CPU、随机存储器RAM、只读存储器ROM、多种I/O口和中断系统、定时器/计时器等功能集成到一块硅片上构成的一个小而完善的计算机系统。本课程设计的指导思想是控制单片机实现从0到99的计数功能,其结果显示在两位一体的共阳极数码管上。 关键词:脉冲计数器数码管单片机 本设计基于单片机技术原理,以单片机芯片STC89C52作为核心控制器,通过硬件电路的制作以及软件程序的编制,设计制作出一个计数器,包括以下功能:输出脉冲,按下键就开始计数,并将数值显示在两位一体的共阳极数码管上。 1课题原理 PCB板上设置开始计数按键和清零按键,以上按键与89C52单片机的P1口连接,通过查询按键是否被按下来判断进行计数或者清零。若按下计数健,则单片机控制两位一体的共阳极数码管显示从00开始的数字,按下一次,则数字加一,一次类推;若按下清零键,则程序返回程序开始处,并且数码管显示00。
2 硬件及软件设计 2.1 硬件系统 2.1.1 硬件系统设计 此设计是在单片机最小系统的基础上进行开发和拓展,增加了按键电路和和数码管显示电路,由于单片机输出电流不足以驱动数码管发光,所以数码管需要驱动电路。我们采用了三极管对数码管电流进行放大,使电流大小达到要求值。 2.1.2 单元电路设计 基本框架如下图2.1 2.1基本框架
1.STC89C52芯片 STC89C52RC芯片包括: 8k字节 Flash,512字节RAM, 32位I/O口 线,看门狗定时器,两个数据指针, 三个16位定时器/计数器,一个6向 量2级中断结构,全双工串行口,片 内晶振及时钟电路。STC89C52RC芯片 可降至0Hz静态逻辑操作,时钟频率 0-80MHz,支持2种软件可选择节电 模式。空闲模式下,CPU停止工作, 允许RAM、定时器/计数器、串口、中 断继续工作。掉电保护方式下,RAM 内容被保存,振荡器被冻结,单片 机一切工作停止,直到下一个中断或 硬件复位为止。8位微控制器8K字节 在系统可编程。芯片如图2.4所示。 图2.4 STC89C52芯片 2.按键电路 K1键为启动键,K2键为清零键,K3键为计数键,通过按钮的连接,实现开始、计数清零功能,连接电路如图2.5所示。 图2.5 按键电路
我们一般采用高速输出信号控制步进电机和伺服电机做位置,角度和速度的控制,比如定位,要实现这个目的,我们要知道这几个条件:1、PLC高速输出需要晶体管输出,继电器属于机械动作,反应缓慢,而且易坏 2、以三菱PLC为例,高速输出口采用Y0 、Y1 3、高速输出指令常用的有 PLSY 脉冲输出 PLSR 带加减速 PLSV……可变速的脉冲输出 ZRN……原点回归 DRVI……相对定位 DRVA……绝对定位 4、脉冲结束标志位M8029 5、D8140 D8141 为Y0总输出脉冲数 6、在同一个程序里面Y0做为脉冲输出,程序可以存在一次,当需要多次使用的时候,可以采用变址V进行数据的切换,频率,脉冲在不同的动作模式中,改变数据
正对上述讲解的内容:我们用一个程序来表示若我们以后可能接触步进。伺服这一块,上述内容,大家一定要熟练掌握! 23、PLC编程实现编码器的脉冲计数 在高速计数器与编码器配合使用之前,我们首先要知道是单向计数,还是双向计数,需要记录记录的数据,需要多少个编码器,在PLC 中也需要多少个高速输入点,我们先要确认清楚。 当我们了解上面的问题以后,参照上题的寄存器分配表得知我们该选择什么高速计数器 如:现在需要测量升降机上升和下降的高度,那么我们需要采用双向编码器,即可加可减的,AB相编码器,PLC需要两个IO点,查表
得知,X0 X1为一路采用C251高速计数器那么我们可以这样编程,如图 开机即启动计数,上升时(方向),C251加计数 下降时(方向),C251减计数 我们要求编码器转动的数据达到多少时,就表示判断实际升降机到达的位置 注意:在整个程序中没有出现X0、X1这个两个软元件? 是因为C251为X0、X1的内置高速计数器,他们是一一对应的,只要见到c251,X0 X1就在里面了,当然,用了C251以后,X 0 、X1不能在程序里面再当做开关量使用了
占空比 占空比的图例 占空比(Duty Ratio)在电信领域中有如下含义:在一串理想的脉冲周期序列中(如方波),正脉冲的持续时间与脉冲总周期的比值。例如:脉冲宽度1μs,信号周期4μs的脉冲序列占空比为0.25。在一段连续工作时间内脉冲占用的时间与总时间的比值。在CVSD调制(continuously variable slope delta modulation)中,比特“1”的平均比例(未完成)。引申义:在周期型的现象中,某种现象发生的时间与总时间的比。例如,在成语中有句话:「三天打渔,两天晒网」,如果以五天为一个周期,“打渔“的占空比则为0.6。 编辑本段定义 占空比是指高电平在一个周期之内所占的时间比率。方波的占空比为50%,占空比为0.5,说明正电平所占时间为0.5个周期。定义1:如果占空比定义为d=rTc。那么,分量F。为:F.一Ub(2d一1)及肛案sin(n)枷一江。脉宽调制波形同时应能明显看出从一个周期到另一个周期,傅里叶分量的幅值将随着占宽比发生的变化而变化。定义2:Dutycycle=Width(Delay+Width)含步进电机的CCD线阵列式位置传感器支架。传感器是CCD线阵列式位置传感器,它是一种新型的固体成像器件,是在大规模集成电路工艺基础上研制而成的模拟集成电路芯片。定义3:所谓占空比是指压缩机持续开启时间与控制周期之比。在确定占空比时必须满足压缩机两次开启时间间隔大于制冷系统高低压侧平衡所需最小时间。定义4:Ts为脉冲周期,Tw为脉冲宽度,定义τ=TwT's×100τ称为占空比。PWM根据输入信号的大小对脉冲宽度进行调制,使得在一个载波周期内输出占空比是输入的函数。定义5:可见改变电源加在负载上正弦电压波形的个数和关断正弦电压波形个数的比率,称为占空比,(占空比用n表示)。改变占空比可实现交流调压.这种微机控制交流调压法属有级调压,由于级数(对应占空比)可以做得很多,故电压级差可以做得很小。定义6:系统工作原理如下,占空比的设定所谓占空比是指直流电机在一个通电与断电周期中其通电时间所占的比例常用下述公式表示:式中Ti—通电时间。定义7:因此黑色区域是探测器的有效区域,与探测元的窗口面积之比称为占空比,此比率的大小直接影响探测器输出信号的大小。定义8:在忽略开关管T和续流二级管D 的正向压降的情况下:Uo=TONTON+TOFF·Ui式中TON为开关管T的导通时间
本科毕业论文(设计、创 作) 题目:环形计数器和扭环形计数器设计 学生姓名:学号: 院(系):电子信息工程学院专业:通信工程 入学时间:年月 导师姓名:职称/学位: 导师所在单位: 完成时间:2014年5月
环形计数器和扭环形计数器设计 摘要 现代世界的快速发展,夜生活已成为大多数城市不可缺少的生活,在夜生活中,五彩斑斓,形状不断变化的LED灯走入了大家的生活。而各种形状的LED灯,随着技术的不断发展,EDA设计得到不断地发展和应用,LED灯所表示的图案多种多样,LED灯中最简单的就数流水灯,而流水灯可以由环形计数器或扭环形计数器控制。本文以环形计数器和扭环形计数器为设计对象,根据其相关规律,设计其运行电路,以及用verilog硬件描述语言实现。内容主要涉及计数器的循环与自启动以及最后整个计数器的检测方案和仿真。本设计可以实现计数器的一些简单的控制,并用modelsim进行仿真。 关键词:环形计数器和扭环形计数器设计;Verilog;modelsim。
Twisted ring counter ring counter and design Abstract The rapid development of the modern world, night life has become indispensable in the life most of the city, in the nightlife, colorful, shape changing LED lights went into people's lives. And various shapes of LED lights, with the continuous development of technology, EDA design get continuously development and application of LED lamp represents pattern is varied, the most simple several water light LED lights, lights and running water can be controlled by the ring counter or twisting the ring counter. This article is based on the circular counter and twisting the ring counter as the design object. According to the counter relevant laws , the counter is to design the operation circuit .this design adopts hierarchical method and verilog hardware description language to realize. This article is mainly related to counter circulation and since the start and final of the test scheme and simulationThis design can realize some simple control counter, and modelsim simulation Keywords: ring counter and twisting the ring counter design ;Verilog; modelsim.
湖南工业大学 课程设计 资料袋 理学学院(系、部)2012 ~ 2013 学年第 1 学期 课程名称单片机应用系统指导教师周玉职称副教授学生姓名张思远专业班级电子科学102 学号10411400223 题目对外部脉冲计数系统的设计 成绩起止日期2013 年01 月06 日~2013 年01 月10 日 目录清单
湖南工业大学 课程设计任务书 2012 —2013 学年第1 学期 理学院学院(系、部)电子科学专业102 班级 课程名称:单片机应用系统 设计题目:对外部脉冲计数系统的设计 完成期限:自2013 年01 月06 日至2013 年01 月10 日共 1 周
指导教师(签字):年月日系(教研室)主任(签字):年月日
附件三 (单片机应用系统) 设计说明书 (题目) 对外部脉冲计数系统的设计 起止日期:2013 年01 月06 日至2013 年01 月10 日 学生姓名张思远 班级电子科学102 学号10411400223 成绩 指导教师(签字) 电气与信息工程学院 2012年12 月10 日
一、设计任务: 1.1 外部脉冲自动计数,自动显示。 1.1.1设计一个255计数器:0-255计数,计满后自动清0,重 新计数(在数码管中显示)。 1.1.2设计一个50000计数器:0-50000计数,计满后自动清0, 重新计数(在数码管中显示)。 注:要求首先采用PROTEUS完成单片机最小系统的硬件电路 设计及仿真;程序仿真测试通过后,再下载到单片机实训 板上执行。 二、硬件设计介绍: ※STC89C52单片机; ※6位共阴或者共阴极数码管; ※外部晶振电路; ※ISP下载接口(In system program,在系统编程); ※DC+5V电源试配器(选配); ※ISP下载线(选配) ※6个PNP(NPN)三极管 ※12个碳膜电阻 三、硬件设计思路 方案一:五个1位7段数码管,无译码器 方案二:五个1位7段数码管,译码器 方案三:1个6位7段数码管,译码器 方案四:1个6位7段数码管,无译码器 考虑实际中外围设备、资金、单片机资源利用率、节省端口数量,可实行性以及连接方便等问题,采用6为数码管(共阳或者共阴极)由于实际中没买到6位的,采用2个三位数码管并接组合一个6位数码管形式;由于实际P口驱动能力有限,故采用6位三极管增大驱动能力,已便足以使得6位数码管亮度明显正常工作,增加6个电阻限流保护数码管不被烧坏。让数码管a-g7段分别接P1.6—P1.0,6位位选分别接P2.5—P2.0。 方法一:共阴极数码管 硬件图1.0所示:通过npn管放大后,段选高电平有效,位选低电平有效
成像硬件用于获得清晰有效的菌落图像,以便分析计数。现今的成像硬件有拍照成像的、扫描成像的。由摄像头拍照成像的优点是:成像速度快,能确保在0.5秒内获得菌落图像。由单反相机、卡片机拍照成像的优点是:能自动对焦、且像素分辨率一般更高,但其成像需要3~4秒的时间。 然而,拍照成像的致命弱点是:成像环境中的光线强度,无论是暗视野,还是背光,想要做到图像中心与边缘保持完全一致,相对来说比较困难。从而引起平皿上亮度的不一致。针对环境光干扰成像方面,通过对仪器照明系统进行精密的设计,上下光源采用了宽光带的LED柔光系统,并结合“悬浮式暗视野”成像系统,不仅能够消除玻璃培养皿的折射光斑,而且通过改变光比,使得菌落表面的皱折、凹陷、边缘的锯齿更富立体感。 扫描成像与在灯箱中营造均匀面光源不同,是将线光源通过移动变成面光源的,光线强度相对比较均匀,其均匀度通常比拍照灯箱的面光源要高一个数量级,从成像硬件的上解决了菌落目标的亮度不匀问题,但扫描只是平面的效果,不能展现培养基表层和深层的细微菌落,且不能展现菌落颜色等多方面的情况,对于观察分析而言构成了一定难度。随着科技发展,高清晰的CMOS、CCD的涌现加上高清晰的镜头,对菌落色彩的还原性、清晰度等都很高,能够解决某些复杂菌落计数问题。对于这类的产品越来越受到科研单位、检测部门、大专院校等的喜爱。 艾驰商城是国内最专业的MRO工业品网购平台,正品现货、优势价格、迅捷配送,是一站式采购的工业品商城!具有10年工业用品电子商务领域研究,以强大的信息通道建设的优势,以及依托线下贸易交易市场在工业用品行业上游供应链的整合能力,为广大的用户提供了传感器、图尔克传感器、变频器、断路器、继电器、PLC、工控机、仪器仪表、气缸、五金工具、伺服电机、劳保用品等一系列自动化的工控产品。 如需进一步了解相关仪器仪表产品的选型,报价,采购,参数,图片,批发等信息,请关注艾驰商城城https://www.doczj.com/doc/1916992382.html,/
脉冲宽度调制(PWM)技术 在电力电子变流器控制系统中,对于控制电路的要求往往是除能够控制负载的加电与断电外,还应该能够控制加载到负载上的电压高低及功率大小。在大功率电力电子电路中,控制加载至负载上电压及功率的实用方法就是脉冲宽度调制(pulse width modulation, PWM)。 1. 面积等效原理 在控制理论中,有一个重要的原理,即冲量等效原理:大小、波形不相同的窄脉冲变量(冲量)作用在具有惯性的环节上时,只要这些变量对时间的积分相等,其作用的效果将基本相同。这里所说的效果基本相同是指惯性环节的输出响应波形基本相同。例如,下图1示出的三个窄脉冲电压波形分别为矩形波、三角波和正弦波,但这二个窄脉冲电压对时间的积分相等,或者说它们的面积相等。当这三个窄脉冲分别作用在只有惯性的同一环节上时,其输出响应基本相同。因此,冲量等效原理也可以称为面积等效原理。 从数学角度进行分析,对上图1所示的三个窄脉冲电压波形进行傅里叶变换,则其低频段的特性非常相近,仅在高频段有所不同,而高频段对于具有惯性负载的电路影响非常小。由此进一步证明了面积等效原理的正确性。 2. 脉冲宽度调制技术
依据面积等效原理,在电路中可以利用低端电源开关或高端电源开关,以一定频率的导通和截止连续切换,使电源电压U i以一系列等幅脉冲(或称为矩形波)的形式加载到负载上,加载在负载上的电源电压Uo波形如图2所示。 图2所示的矩形波的电压平均值: 此式表明在一个脉冲周期内,电压的平均值与脉冲的占空比是成正比的,于是,可以通过改变脉冲的占空比来调整加载到负载上的电压大小。当占空比小时,加载到负载上的平均电压就低,即加载到负载上的功率小;而占空比大时,加载到负载上的平均电压就高,加载到负载上的功率大。这种通过等幅脉冲调节负载平均电压及功率的方法称为脉冲宽度调制,也称为斩波控制。 采用脉冲宽度调制方式为负载供电,由于供电电压是脉动的,势必会产生出各种谐波。为了明确脉冲宽度调制技术对负载产生的影响,且考虑此分析结果便于以后章节引用,可将图2所示的等幅脉冲序列描述为 式中,G(t)为开关函数,其波形如图3所示。 在此式中,第一项DUi是等幅脉冲序列的直流成分,也即输出电压的平均值。可见,输出电
南昌航空大学实验报告 二0一一年九月二十九日 课程名称:单片微型机实验名称:脉冲计数和电脑时钟程序 班级: 080611 学生姓名:学号: 08061108 指导教师评定:签名: 一、实验目的 1、熟悉8031定时/计数功能,掌握定时/计数初始化编程方法; 2、熟悉MCS—51定时器、串行口和中断初始化编程方法,了解定时器应用在实时控制中程序的设计技巧; 3、编写程序,从DVCC系列单片机实验仪键盘上输入时间初值,用定时器产生0.1S定时中断,对时钟计数器计数,并将数值实时地送数码管显示。 二、实验内容及要求 1、脉冲计数 对定时器0外部输入的脉冲进行计数,并送显示器显示。程序框图如下: 图1 二进制转换子程序 2、电脑时钟程序程序 程序框图如下:
图2 定时中断服务程序 三、实验步骤及操作结果 1、脉冲计数程序 (1) 当DVCC 单片机仿真实验系统独立工作时 1) 把8032CPU 的P3.4插孔接T0—T7任一根信号线或单脉冲输出空“SP ”。 2)用连续方式从起始地址02A0H 开始运行程序(按02A0后按EXEC 键)。 3)观察数码管显示的内容应为脉冲个数。 (2) 脉冲计数程序(源文件名:Cont .Asm )。汇编程序代码如下: ORG 02A0H CONT: MOV SP,#53H MOV TMOD,#05H ;初始化定时/计数器 MOV TH0,#00H MOV TL0,#00H SETB TR0 ;允许定时/计数中断 CONT1: MOV R2,TH0 ;取计数值 MOV R3,TL0 LCALL CONT2 ;调二转十进制子程序 MOV R0,#79H MOV A,R6 LCALL PWOR MOV A,R5 LCALL PWOR MOV A,R4 LCALL PWOR LCALL DISP ;调显示子程序 SJMP CONT1 ;循环 CONT2: CLR A ;清R4、R5、R6 MOV R4,A MOV R5,A MOV R6,A MOV R7,#10H CONT3: CLR C ;R2、R3左移,移出的位送CY MOV A,R3 RLC A
计数器工作原理及应用 除了计数功能外,计数器产品还有一些附加功能,如异步复位、预置数(注意,有同步预置数和异步预置数两种。前者受时钟脉冲控制,后者不受时钟脉冲控制)、保持(注意,有保持进位和不保持进位两种)。虽然计数器产品一般只有二进制和十进制两种,有了这些附加功能,我们就可以方便地用我们可以得到的计数器来构成任意进制的计数器。下面我们举两个例子。在这两个例子中,我们分别用同步十进制加法计数器74LS160构成一个六进制计数器和一个一百进制计数器。 因为六进制计数器的有效状态有六个,而十进制计数器的有效状态有十个,所以用十进制计数器构成六进制计数器时,我们只需保留十进制计数器的六个状态即可。74LS160的十个有效状态是BCD编码的,即0000、0001、0010、0011、0100、0101、0110、0111、1000、1001[图5-1]。 图5-1 我们保留哪六个状态呢?理论上,我们保留哪六个状态都行。然而,为了使电路最简单,保留哪六个状态还是有一点讲究的。一般情况下,我们总是保留0000和1001两个状态。因为74LS160从100 1变化到0000时,将在进位输出端产生一个进位脉冲,所以我们保留了0000和1001这两个状态后,我们就可以利用74LS160的进位输出端作为六进制计数器的进位输出端了。于是,六进制计数器的状态循环可以是0000、0001、0010、0011、0100和1001,也可以是0000、0101、0110、0111、1000和1001。我们不妨采用0000、0001、0010、0011、0100和1001这六个状态。 如何让74LS160从0100状态跳到1001状态呢?我们用一个混合逻辑与非门构成一个译码器[图5. 3.37b],当74LS160的状态为0100时,与非门输出低电平,这个低电平使74LS160工作在预置数状态,当下一个时钟脉冲到来时,由于等于1001,74LS160就会预置成1001,从而我们实现了状态跳跃。
沈阳航空航天大学 课程设计报告 课程设计名称:微机系统综合课程设计课程设计题目:占空比可调的脉冲发生器 院(系):计算机学院 专业:计算机科学与技术 班级: 学号: 姓名: 指导教师:张维君 完成日期:2012年7月15日
沈阳航空航天大学课程设计报告 目录 第1章总体设计方案 (1) 1.1课程设计的内容和要求 (1) 1.2课程设计原理 (1) 1.3方案设计 (1) 1.4方案论证 (2) 1.5设计环境 (2) 第2章详细设计方案 (3) 2.1模块设计 (3) 2.2程序流程图 (4) 2.3硬件连线图 (6) 第3章调试及结果分析 (7) 3.1调试步骤及方法 (7) 3.2实验结果 (7) 3.3结果分析 (8) 参考文献 (9) 附录(源程序) (10)
沈阳航空航天大学课程设计报告错误!未指定书签。第 1章总体设计方案 第1章总体设计方案 1.1课程设计的内容和要求 一、课程设计内容: 具体内容如下: 1.用8255和8253产生脉宽可调的脉冲信号; 2.用实验箱上键盘中的两个按键调节脉冲; 3.按脉宽增加键脉宽逐渐增大,按脉宽减小键脉宽逐渐减小; 二、课程设计要求: 1.认真查阅相关资料; 2.独立设计、调试并通过指导教师现场验收; 3.撰写课程设计报告。 1.2 课程设计原理 根据课设要求,要实现通过键盘按键调节脉宽的脉冲信号发生器。本次设计中主要使用了8259可编程中断控制器,8255可编程并行接口芯片,8279键盘/显示芯片,8253定时/计数器以及部分连线来实现以上功能。利用8253芯片产生一定频率的脉冲信号,并用8255芯片以程序查询方式,检测该信号上高、低电平的持续时间,还要利用8259芯片的中断信号扫描信号,通过改变高电平的持续时间来调节占空比。最后,应用8279芯片将结果显示到数码管上。 1.3 方案设计 根据本次课程设计要求,用8253芯片计数器0产生低频率的方波信号,然后叠加一个矩形波,使之成为一个改变分频就可以改变占空比的矩形波。再将该矩形波作为计数器1产生的输入信号,使计数器1产生脉宽可调的脉冲信号,并把该脉冲信号接到8255的一个引脚(PB0),运用程序查询方式循环检测这个引脚高、低电平持续时间。利用芯片8259的中断功能循环扫描芯片8253计数器1的分频数,通过分频数计算占空比的值。在BX中存放分频数NUM,在CX中
5.3 高速计数器 前面讲的计数器指令的计数速度受扫描周期的影响,对比CPU扫描频率高的脉冲输入,就不能满足控制要求了。高速计数器HSC用来累计比PLC扫描频率高得多的脉冲输入,利用产生的中断事件完成预定的操作。 一、高速计数器介绍 S7-200系列PLC设计了高速计数功能(HSC),其计数自动进行不受扫描周期的影响,最高计数频率取决于CPU的类型,CPU22x系列最高计数频率为30KHz。高速计数器在程序中使用时的地址编号用HC n来表示(在非正式程序中有时用HSC n),HC (HSC)表示编程元件名称为高速计数器,n为编号。 表5-3 高速计数器的数量与编号表 1.高速计数器输入端的连接 每个高速计数器对它所支持的时钟、方向控制、复位和启动都有专用的输入点,通过中断控制完成预定的操作。每个高速计数器专用输入点如表5-4所示。 注意:同一个输入端不能用于两种不同的功能。但是高速计数器当前模式未使用的输入端均可用于其他用途,如作为中断输入端或作为数字量输入端。每个高速计数器的3种中断的优先级由高到低,各个高速计数器引起的中断事件如表5-5所示。
S7-200系列PLC高速计数器HSC0~HSC5可以分别定义为四种工作类型:带有内部方向控制的单相计数器;带有外部方向控制的单相计数器;带有增/减计数脉冲输入的双相计数器;A/B相正交计数器。 根据有无复位输入和启动输入,每种高速计数器类型可以设定为三种工作状态:无复位且无启动输入;有复位但无启动输入;有复位且有启动输入。 HSC0~HSC5可以根据外部输入端的不同配置12种模式(模式0~模式11),高速计数器的工作模式见表6-4。 表6-5 高速计数器的控制字节(位)
实验五含异步清零和同步使能4位加法计数器的VHDL设计一、实验目的 1掌握计数器的VHDL设计方法; 2掌握异步复位和同步复位和使能的概念; 3掌握寄存器性能的分析方法(即分析芯片所能达到的最高时钟频率)。 二、实验内容 1异步复位4位加法计数器的设计; 2同步复位4位加法计数器的设计。 3异步清0和同步时钟使能的4位加法计数器 三、实验原理 复位:给计数器一个初值叫复位,如果所给初值为0,则称复位为清零。 异步复位:复位跟时钟无关,只要复位信号的复位电平出现,计数器立即复位,如图5-1 所示; 同步复位:复位跟时钟有关,当复位信号的复位电平出现时,计数器并不立即复位,而是要等到时钟沿到来时才复位,如图5-2所示。 异步复位4位加法计数器的VHDL设计代码见教材P122-P123,仿真波形如图5-3所示。同步复位4位加法计数器的VHDL部分代码如下,仿真波形如图5-4所示。 . 图5-1异步复位
图5-2同步复位 图5-3异步复位计数器仿真波形 图5-4同步复位计数器仿真波形 四、实验步骤 (一)异步复位4位加法计数器的设计 1建立一个设计工程,工程名为CNT4B; 2打开文本编辑器,建立一个VHDL设计文件,其VHDL代码见教材P164中的例6-20,文件名存为CNT4B.VHD。注意文件的扩展名要选为.vhd,而且要求工程名、文件名和设计实体名必须相同。 3选器件:ACEX1K,EP1K30TC144-3(旧)或Cyclone,EP3C40Q240C8目标芯片。4编译; 5建立波形文件,然后保存,其文件名必须与工程名一致;【波形设置:①设置仿真时间为10us:②设置输入信号的波形:时钟周期设置为200ns,其他输入信号的波形设置参看图6-3。】
中南林业科技大学涉外学院 认识实习报告 名称:脉冲信号发生器与计数器 姓名学号: 系:理工系专业:电子信息工程班级:实习时间:实习地点:
目录 一、题目 二、任务和要求 三、内容 (1)如何用仪表测量 (2)如何焊接 (3)如何调试 四、结论 五、体会和收获
一、题目脉冲信号发生其与计数器 二、任务和要求 1:焊接电路板 2:装配电阻、安装短路线、装配芯片、装配按键S、装配电容、装配发光二极管、安装电源插座、测试 三、内容 (1)安装好后,目测检查,是否焊接好了。插入电源线,电源线额另一端接电源,一定不要接错了,印刷板上标有+的一端接电源+5V,另一端接 地。千万注意,电源不要接错了。打开电源,测试电源电压,测试芯片 上各脚电压。按下按键,试着短按和长按,观察现象。测试各发光二极 管(有亮的也有不亮的都测)的电压。短按时,每次产生一个脉冲,观 察到由发光二极管显示的二进制数加一。长按时,产生连续脉冲,观察 到由发光二极管显示的二进制数连续累加。 (2)加热焊件;移入焊锡;焊锡融化后,移开焊锡;移开电烙铁。注意掌握好时间,焊接好后,剪去焊盘外的导线 (3)打开电源,测试电源电压,测试芯片上各脚电压。按下按键,试着短按和长按,观察现象 四、结论 利用集成定时器(芯片 NE555)产生信号,当按键被单次单次地按下时,产生一个一个的单脉冲信号;当按键按下不动时,产生连续脉冲信号。可利用集成技术器(芯片4024)计数。其状态反映脉冲的个数。利用发光二级管显示已经计数的脉冲数,其中74LS04是驱动电路。 五、体会和收获 经过这次实习,了解到了如何焊接电路板、焊接电路板所需注意的事项、认识各种原配件和如何检测焊成后的电路板,同时培养了自己的动手能力和对电路这门课程的认知