三维合成孔径声呐成像系统
所属领域:电子信息
完成人:张学武等
成果简介:
系统主要由四个部分组成:湿端组件(拖体)、拖曳系统、信号处理机和控制台,各组成部分之间通过千兆以太网进行通信,协同完成超声波信号的发射、接收、声数据处理、和声图像的成像功能。控制命令由干端显控台发出,通过光纤传输到湿端组件,湿端数据采集传输和控制中心通过串口与传感器进行通信;采集获得的声数据通过光纤发送到显控
台进行处理。
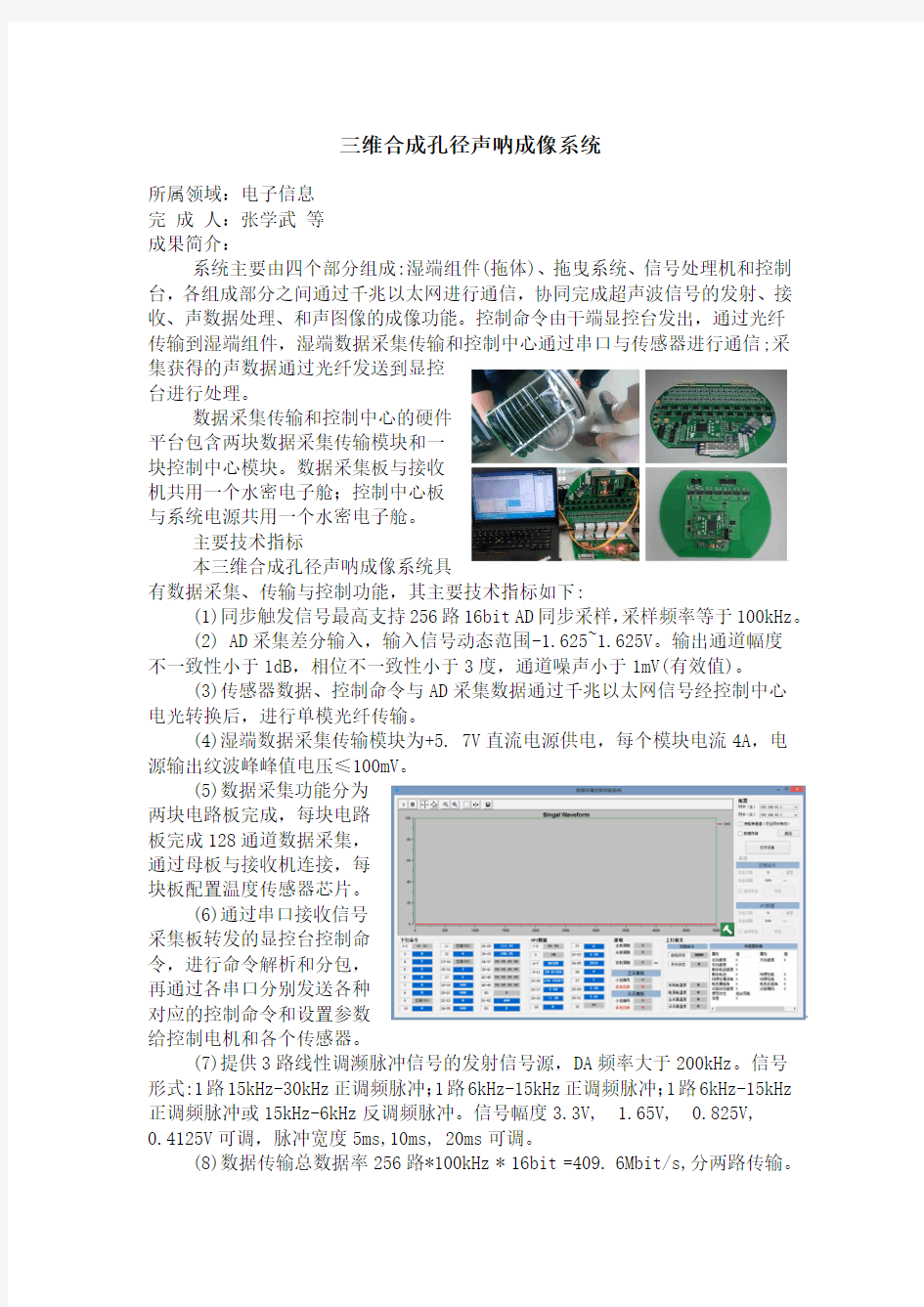
数据采集传输和控制中心的硬件
平台包含两块数据采集传输模块和一
块控制中心模块。数据采集板与接收
机共用一个水密电子舱;控制中心板
与系统电源共用一个水密电子舱。
主要技术指标
本三维合成孔径声呐成像系统具
有数据采集、传输与控制功能,其主要技术指标如下:
(1)同步触发信号最高支持256路16bit AD同步采样,采样频率等于100kHz。
(2) AD采集差分输入,输入信号动态范围-1.625~1.625V。输出通道幅度
不一致性小于1dB,相位不一致性小于3度,通道噪声小于1mV(有效值)。
(3)传感器数据、控制命令与AD采集数据通过千兆以太网信号经控制中心
电光转换后,进行单模光纤传输。
(4)湿端数据采集传输模块为+5. 7V直流电源供电,每个模块电流4A,电
源输出纹波峰峰值电压≤100mV。
(5)数据采集功能分为
两块电路板完成,每块电路
板完成128通道数据采集,
通过母板与接收机连接,每
块板配置温度传感器芯片。
(6)通过串口接收信号
采集板转发的显控台控制命
令,进行命令解析和分包,
再通过各串口分别发送各种
对应的控制命令和设置参数
给控制电机和各个传感器。
(7)提供3路线性调濒脉冲信号的发射信号源,DA频率大于200kHz。信号
形式:1路15kHz-30kHz正调频脉冲;1路6kHz-15kHz正调频脉冲;1路6kHz-15kHz 正调频脉冲或15kHz-6kHz反调频脉冲。信号幅度3.3V, 1.65V, 0.825V,
0.4125V可调,脉冲宽度5ms,10ms, 20ms可调。
(8)数据传输总数据率256路*100kHz * 16bit =409. 6Mbit/s,分两路传输。
合成孔径声纳 合成孔径声纳的研究起源于五十年代末期,但直到八十年代以后,合成孔径声纳的研究才逐步全面展开。目前国际上只有少数国家和地区研制出了合成孔径声纳原型机并进行了海上试验。 合成孔径声纳是一种新型高分辨水下成像声纳,合成孔径雷达原理推广到水声领域,就出现了合成孔径声纳。其基本原理是利用小孔径基阵的移动,通过对不同位置接收信号的相关处理,来获得移动方向(方位方向)上大的合成孔径,从而得到方位方向的高分辨力。从理论上讲,这种分辨力和探测距离无关。直观地说,距离越大,合成孔径长度就越长,合成阵的角分辨率就越高,从而抵消了距离增大的影响,保持了分辨力不变。 但合成孔径声纳作为一种水下成像设备,受水下复杂条件的影响,有不同于合成孔径雷达的特点。首先是声传播信道的非理想性比合成孔径雷达中电磁波传播的严重;其次是声纳拖体的运动稳定性比合成孔径雷达要差得多;再者因为声速大大低于电磁波在空间的传播速度,从而大大限制了拖体运动的速度;最后由于声纳中常采用宽带信号而使雷达中的一些窄带信号处理方法在合成孔径声纳中不再适用,需对已有的算法进行改进或研究新的算法。这正是合成孔径声纳研究极富挑战性之所在。 合成孔径声纳系统一般由三个分系统组成:1)声纳分系统,由合成孔径声纳基阵、发射机、接收机、数据采集、传输和存储子系统、声纳信号处理机和显控台等组成;2)姿态与位移测量分系统,由姿态、位移测量系统和GPS等组成;3)拖曳分系统,由绞车、拖缆和拖体等组成。 合成孔径声纳可以用于水下军事目标的探测和识别,最直接的应用就是进行沉底水雷和掩埋水雷的高分辨探测和识别。在国民经济方面,可以用于海底测量、水下考古和搜寻水下失落物体等,尤其可以进行高分辨海底测绘,对数字地球研究具有重要意义。 综合声纳技术研究室"九五"期间在国家863项目支持下,研制出国内第一套合成孔径声纳湖试样机。 合成孔径声纳成像算法 合成孔径声纳成像算法分为聚焦处理和非聚焦处理算法。这里只要介绍聚焦算法。聚焦处理成像算法较多,主要包括数字波束形成算法、距离-多普勒(R-D)算法、波数域(w-k)算法和调频变换(Chirp-Scaling)算法等。 波束形成算法 这种方法是一种逐点计算像素值的方法。根据声纳拖体运动过程中发射信号和接收信号传播路径的几何关系,计算出运动轨迹上各个接收位置的时间延迟或相位差,通过延时补偿后迭加的方法得出各像素点的值,从而得到合成孔径声纳的图像。这是一种逐点算法,计算量很大,适用于宽带信号的情况。 距离-多普勒(R-D)算法 这种算法首先对时域匹配滤波后得到的原始数据进行空间波数域变换,得到距离-多普勒域的结果,然后在距离-多普勒域通过数据的重排补偿时延的变化,最后实施横向空间压缩,从而获得最终的合成孔径的图像。这是一种逐线处理算法。 波数域(w-k)算法 这种算法把脉冲压缩后原始数据的图像经过二维付氏变换得到频率-波数域的图像,对这个图像进行适当处理后,在进行一种称作Stolt映射的变换,就得到了直角坐标的纯波数域的像,最后再经过二维逆付氏变换,就得到了最终合成孔径的图像。这是一种数据成块处理的算法,因而效率很高,适用于宽带信号的情况。
合成孔径雷达概述 1合成孔径雷达简介 (2) 1.1 合成孔径雷达的概念 (2) 1.2 合成孔径雷达的分类 (3) 1.3 合成孔径雷达(SAR)的特点 (4) 2合成孔径雷达的发展历史 (5) 2.1 国外合成孔径雷达的发展历程及现状 (5) 2.1.1 合成孔径雷达发展历程表 (6) 2.1.2 世界各国的SAR系统 (9) 2.2 我国的发展概况 (11) 2.2.1 我国SAR研究历程表 (11) 2.2.2 国内各单位的研究现状 (12) 2.2.2.1 电子科技大学 (12) 2.2.2.2 中科院电子所 (12) 2.2.2.3 国防科技大学 (13) 2.2.2.4 西安电子科技大学 (13) 3 合成孔径雷达的应用 (13) 4 合成孔径雷达的发展趋势 (14) 4.1 多参数SAR系统 (15) 4.2 聚束SAR (15) 4.3极化干涉SAR(POLINSAR) (16) 4.4合成孔径激光雷达(Synthetic Aperture Ladar) (16) 4.5 小型化成为星载合成孔径雷达发展的主要趋势 (17) 4.6 性能技术指标不断提高 (17) 4.7 多功能、多模式是未来星载SAR的主要特征 (18) 4.8 雷达与可见光卫星的多星组网是主要的使用模式 (18) 4.9 分布SAR成为一种很有发展潜力的星载合成孔径雷达 (18) 4.10 星载合成孔径雷达的干扰与反干扰成为电子战的重要内容 (19) 4.11 军用和民用卫星的界线越来越不明显 (19) 5 与SAR相关技术的研究动态 (20) 5.1 国内外SAR图像相干斑抑制的研究现状 (20) 5.2 合成孔径雷达干扰技术的现状和发展 (20) 5.3 SAR图像目标检测与识别 (22) 5.4 恒虚警技术的研究现状与发展动向 (25) 5.5 SAR图像变化检测方法 (27) 5.6 干涉合成孔径雷达 (31) 5.7 机载合成孔径雷达技术发展动态 (33) 5.8 SAR图像地理编码技术的发展状况 (35) 5.9 星载SAR天线方向图在轨测试的发展状况 (37) 5.10 逆合成孔径雷达的发展动态 (38) 5.11 干涉合成孔径雷达的发展简史与应用 (38)
无人水下航行器声呐装备现状与发展趋势 无人水下潜航器(UUV)最早出现于20世纪60年代。在发展初期,UUV主要用于深水勘探、沉船打捞、水下电缆铺设及维修等民用领域,后逐步扩展应用于水下声源探测、协助潜艇深水避雷、港口战术侦察等军事领域。近十几年来,随着平台、推进器、导航、控制系统以及传感器技术的发展,加上现代战争追求人员零伤亡的理念,UUV的军事应用得到高度重视,其在水下侦察、水下通信和反潜、反水雷作战、信息作战等领域的应用得到了空前发展。 美国国防部于2007~2013年间前后发布了4版《无人系统(一体化)路线图》,其中针对UUV的4个级别将任务按优先级扩充为17项,如表1所示:
美海军于2000年和2004年分别发布两版《海军无人水下潜航器总体主规划》,将UUV(不分级别)的任务按优先顺序归纳为9类:①情报/监视/侦察(ISR);②水雷对抗(MCM);③反潜战(ASW);④检查/识别;⑤海洋调查; ⑥通信/导航网络节点(CN3);⑦载荷投送;⑧信息作战; ⑨时敏打击。 不论是《海军无人水下潜航器总体主规划》,还是《无人系统(一体化)路线图》,这几版文件中对于所有级别的
UUV,情报/监视/侦察(ISR)、检查/识别和水雷对抗(MCM)这3项任务的排序都十分靠前,这也印证了在当今复杂国际环境下美国海军对于这3项UUV任务执行的迫切需求。 UUV执行各项任务无一不需要声呐的配合,尤其是对于ISR、检查/识别和MCM,声呐性能的优劣,往往是任务完成度的决定性因素。根据功能的不同,UUV声呐装备主要分为三大类:通信声呐、导航声呐和探测声呐,如图1所示。 通信声呐主要用于UUV与协同行动的其他UUV、母船(艇)或通信浮标之间的信息链接;导航声呐为UUV的安全航行和执行作业任务提供其位置、航向、深度、速度和姿态等信息;探测声呐主要用于警戒、探测、识别水中或沉底目标信息,对水下地形、地貌、地质进行勘察和测绘。承担不
光学合成孔径成像技术简介 机械电子工程 201028013919088 李 鹏 一.光学合成孔径成像的研究意义 高分辨率目标成像对航天遥感和军事应用有着重要意义,根据波动光学理论,传统光学成像系统角分辨率为[1]: 1.22/D θλ= 分辨率受波长和光学系统口径的限制。对于一定的工作波段,若要提高系统的角分辨率,则只能增大系统口径。而在实际应用中很多因素限制了系统孔径的增大。高分辨率成像需要长焦距、大口径光学系统,但其成本高、材料制备困难、制造技术难度大,这些因素制约着大口径光学系统的发展。于上世纪70年代提出的多孔径成像技术为提高分辨率提供了新的方法。如何用小口径系统来达到单个大望远镜的分辨本领,就是多孔径成像的目的。与传统的光学系统相比,多孔径成像技术具有如下特征和优点[2]:①降低了光学元件的加工制造难度;②光学元件体积小,重量轻,系统可以设计成为折叠式,有利于减小发射体积和重量,节约发射费用;③系统设计和组装灵活多变,特别适用于各种空间光学系统。为了提高成像系统的分辨率,光学多孔径成像技术从无到有,逐步发展壮大,可以肯定地说,随着技术的发展,多孔径成像技术将被应用到更多的成像领域。 二. 光学合成孔径成像原理 1.光学成像原理分类[3] 光学成像原理可分为三大类,一类是几何光学、像差理论成像原理,通常的光学系统设计按此理论基础进行的;一类是衍射成像原理,它以波动光学的衍射理论为基础,结合通信理论中线性系统的方法,把成像系统视为空不变的线性系统,成像系统的特性用相干传递函数(相干照明)或光学传递函数(非相干照明)来描述,衍射成像原理在像质定量评价和成像系统分辨率的研究以及实现高分辨率成像等方面起了重要的作用;另一类成像理论是干涉成像原理,它认为成像过程本质上是干涉过程,像面上任何一点的光扰动必然是出瞳上各点光扰动贡献的
3D立体成像技术简介 3D立体成像技术其实并不是一个新鲜事物。如果从时间上看,3D立体成像 技术早在上个世纪中叶就已经出现,比起现在主流的的液晶、等离子这些平板 显示技术,历史更加悠久。 那么现在的3D电视,到底使用了哪些方式来实现所谓的“全高清无闪烁”的立体影像呢? 色差式3D 历史悠久缺点最多 首先我们看看最早出现的也是最容易实现的一种3D立体成像技术:色差式 3D成像技术。 从技术层面上看色差式3D立体成像是比较简单的一种方法,这种3D成像 只需要通过一副简单的红蓝(或者红绿)眼镜就可实现,硬件成本不过几元钱。显示设备方面也无需额外的升级,现有的任何显示设备都可以直接显示。 色差式3D立体成像技术的原理是将两张不同视角上拍摄的影像分别以两种不同的颜色印制在同一副画面中,如果不戴眼镜,我们只能看到色彩重合的模 糊图像。但是戴上眼镜后,左右眼不同颜色的镜片分别过滤了对应的色彩,只 有红色的影像通过红色镜片蓝色通过蓝色镜片,最终两只眼睛看到的不同影像 在人脑中重叠产生了立体效果。 色差式3D立体成像原理简单,能达到的3D景深效果也还算不错。不过由 于采用的色度分离方式会给观看者带来比较严重的视觉障碍,舒适感始终不能 让人满意,同时画面的色彩还原效果也一直在较低的水准徘徊,这就导致了它 很难成为3D立体显示技术中的主流。 偏光式3D 影院主流家庭不易实现 在3D电视大量出现之前,3D影院其实已经进入我们的生活很长一段时间。而在3D影院之中最为常见的,就是偏光式3D技术。 偏光式3D技术主要利用偏振光分离技术实现3D立体成像。观看者通过佩 戴偏振眼镜,左右眼镜片就分别过滤掉不同偏振方向的光线,从而实现了左右 眼画面的分离。 影院方面在具体实施的时候主要有两种方式:双机3D和单机3D。双机3D 多用在IMAX 3D影院中,通过使用两台投影机,分别透射偏振方向不一样的左 右眼画面。单机3D相对简单,主要通过但抬头迎和快速切换的偏振器来分别高速切换左右眼画面,最终再通过偏振眼镜进行左右眼画面的分离。
三维合成孔径声呐成像系统 所属领域:电子信息 完成人:张学武等 成果简介: 系统主要由四个部分组成:湿端组件(拖体)、拖曳系统、信号处理机和控制台,各组成部分之间通过千兆以太网进行通信,协同完成超声波信号的发射、接收、声数据处理、和声图像的成像功能。控制命令由干端显控台发出,通过光纤传输到湿端组件,湿端数据采集传输和控制中心通过串口与传感器进行通信;采集获得的声数据通过光纤发送到显控 台进行处理。 数据采集传输和控制中心的硬件 平台包含两块数据采集传输模块和一 块控制中心模块。数据采集板与接收 机共用一个水密电子舱;控制中心板 与系统电源共用一个水密电子舱。 主要技术指标 本三维合成孔径声呐成像系统具 有数据采集、传输与控制功能,其主要技术指标如下: (1)同步触发信号最高支持256路16bit AD同步采样,采样频率等于100kHz。 (2) AD采集差分输入,输入信号动态范围-1.625~1.625V。输出通道幅度 不一致性小于1dB,相位不一致性小于3度,通道噪声小于1mV(有效值)。 (3)传感器数据、控制命令与AD采集数据通过千兆以太网信号经控制中心 电光转换后,进行单模光纤传输。 (4)湿端数据采集传输模块为+5. 7V直流电源供电,每个模块电流4A,电 源输出纹波峰峰值电压≤100mV。 (5)数据采集功能分为 两块电路板完成,每块电路 板完成128通道数据采集, 通过母板与接收机连接,每 块板配置温度传感器芯片。 (6)通过串口接收信号 采集板转发的显控台控制命 令,进行命令解析和分包, 再通过各串口分别发送各种 对应的控制命令和设置参数 给控制电机和各个传感器。 (7)提供3路线性调濒脉冲信号的发射信号源,DA频率大于200kHz。信号 形式:1路15kHz-30kHz正调频脉冲;1路6kHz-15kHz正调频脉冲;1路6kHz-15kHz 正调频脉冲或15kHz-6kHz反调频脉冲。信号幅度3.3V, 1.65V, 0.825V, 0.4125V可调,脉冲宽度5ms,10ms, 20ms可调。 (8)数据传输总数据率256路*100kHz * 16bit =409. 6Mbit/s,分两路传输。
无人水下潜航器(UUV)最早出现于20世纪60年代。在发展初期,UUV主要用于深水勘探、沉船打捞、水下电缆铺设及维修等民用领域,后逐步扩展应用于水下声源探测、协助潜艇深水避雷、港口战术侦察等军事领域。近十几年来,随着平台、推进器、导航、控制系统以及传感器技术的发展,加上现代战争追求人员零伤亡的理念,UUV的军事应用得到高度重视,其在水下侦察、水下通信和反潜、反水雷作战、信息作战等领域的应用得到了空前发展。 美国国防部于2007~2013年间前后发布了4版《无人系统(一体化)路线图》,其中针对UUV的4个级别将任务按优先级扩充为17项,如表1所示。 表1 不同级别UUV任务需求优先级
美海军于2000年和2004年分别发布两版《海军无人水下潜航器总体主规划》,将UUV(不分级别)的任务按优先顺序归纳为9类:①情报/监视/侦察(ISR);②水雷对抗(MCM);③反潜战(ASW);④检查/识别;⑤海洋调查;⑥通信/导航网络节点(CN3);⑦载荷投送;⑧信息作战;⑨时敏打击。
不论是《海军无人水下潜航器总体主规划》,还是《无人系统(一体化)路线图》,这几版文件中对于所有级别的UUV,情报/监视/侦察(ISR)、检查/识别和水雷对抗(MCM)这3项任务的排序都十分靠前,这也印证了在当今复杂国际环境下美国海军对于这3项UUV任务执行的迫切需求。 UUV执行各项任务无一不需要声呐的配合,尤其是对于ISR、检查/识别和MCM,声呐性能的优劣,往往是任务完成度的决定性因素。根据功能的不同,UUV声呐装备主要分为三大类:通信声呐、导航声呐和探测声呐,如图1所示。 图1 UUV主要声呐装备
三种3D立体成像显示技术 3D显示(或称立体成像)技术有几百年的历史。从原理上大致可分为三大类:立体图像对技术(Stereo Pair)、体显示技术(Volumetric Displays)、全息技术(Holography)。 立体图像对是目前发展最成熟也是应用最广泛的3D显示技术,戴立体眼镜看3D电影和裸眼就能看到立体效果的显示屏都是基于这种技术实现的。它的基本原理是,先产生场景的两个视图或多个视图,然后用某种机制(如佩戴眼镜)将不同视图分别传送给左右眼,确保每只眼睛只看到对应的视图而看不到其他视图。如果观察者无需佩戴立体眼镜即可看到立体效果,则称为“裸眼立体显示”。 虽然立体图像对技术能够提供立体感,但它本质上只是空间中两张或多张平面图像,通过“欺骗”人眼视觉系统而立体成像。这类技术会使人眼产生矛盾的晶状体焦距调节和视线汇聚调节,长时间观看会产生视觉疲劳。而体显示技术与之不同,它物理上显示了三个维度,能在空间中产生真正的3D效果。成像物体就像在空间中真实存在,观察者能看到科幻电影中一般“悬浮”在半空中的3D透视图像。从数字图像处理技术来说,平面图像对应了二维数组,每个元素被称为像素;而三维图像对应三维数组,每个元素被称为体素。体显示技术正是在空间中表现了这个三维数组。 根据是否有机械结构,体显示可分为两种实现方式,扫描体显示(Swept Volume)和静态体显示(Static Volume)。扫描体显示技术利用高速旋转的平面反射光线,并通过视觉记忆而立体成像。一个成功的产品是Actuality系统公司的Perspecta 3D显示器。而静态体显示的典型产品是Felix3D公司的SolidFelix,它以含有稀土元素的晶体作为显示介质,使用两束相干激光照射晶体内部空间点发光。另一个静态体显示技术的产品是DepthCube 系统,它使用20块液晶屏层叠而成,任何时刻只有一块屏工作,其他都是透明的,而图像也只投射到工作的显示屏上。DepthCube在这20块屏上快速切换显示3D物体截面从而产生纵深感。 全息技术是利用光波的干涉和衍射原理记录并再现物体的真实感的一种成像技术。全息照片记录了物体拍摄时的干涉条纹,重现时用相干光源照射全息照片,根据光的衍射而立
一种声呐流量计的孔径宽度确定方法 本文提出了一种高端流量检测仪表,声呐流量监测系统,该系统采用管道外部缠绕道的阵列式PVDF压电薄膜传感器侦听流体经过管壁时对流漩涡产生的振动信号。其受被测流体温度、压力等流体特性参数的影响微弱,是国产高端自动化仪表。本文结合案例给出了声呐流量检测系统的关键处理步骤。阵列信号孔径确定方法。 1 阵列信号处理的窗函数孔径计算 流经管道的流体参数用一个空间阵列来测量,空间阵列有沿管道不同轴向位置排列的8个传感器。每一个压力传感器提供一个时域信号,指示管道内相应轴向位置处的不稳定压力。来自每个压力传感器的时域信号,用持续时间为D的时窗分成几个时窗段,然后几个时窗段被转换成几个频谱。时窗段可以重叠。调节时窗的持续时间D来反应流体参数。在具体实施方案中,持续时间D按照至少两个传感器的空间阵列的孔径长度函数确定。例如,持续时间D可以确定为:D=C (Aperture)/u这里,C是常数,Aperture是空间阵列的间隔,u是流体的平均流速。 另一方面,调节几个频谱的时间频率范围来反应流体参数。定义时间频率范围的最小和最大频率限确定为:fmin=Cminu/Δx和fmax=Cmaxu/Δx这里,fmax和fmin分别是最大和最小频率限,Cmax 和Cmin是常数,Δx是空间阵列中传感器的间隔。开始通过可能的流速范围粗略的分割发现该流体的近似流速,例如,每一个比前一个高约5%。对于每一步,一个频率范围被选择用于分析,避免了空间混叠和共模噪声。 作为输入提供给FFT逻辑的时域压力信号P1(t)…PN(t),每个都用时窗长度D和一个已知的窗函数(例如汉明窗、贝塞尔窗等)分成较短的时间。每个时窗段可以是彼此独立的,也可以是重叠的。 传感器的输入信号P1(t),P2(t)…,或PN(t),根据情况被
立体成像显示原理[图] 立体显示原理 1 概述 2 技术原理 2.1分类主动立体系统被动立体系统光谱分割立体显示系统2.2 不同立体显示方法对比表1 概述人们对视觉听觉的追求总是趋向于真实再现,二维画面对一般显示应用而言可以很好的表达所需的中心思想,但在一些特定行业和领域,以及追求感官震撼的娱乐场所等地方,平面图像就完全无用武之地,所以三维立体投影成为这些领域的必备系统。需要立体投影应用的环境通常包括:航天/航海/汽车等行业的模拟系统,地质探测,药品,建筑,工程,制造,博物馆,科研机构,影院,娱乐等等。以往并不常见的3D显示方案演示,今年则逐渐开始了热起来的趋势。3D立体或沉浸环境影像的应用从高端到民用,应用可以说无处不在。高端包括为工业及研究机构提供的基于虚拟现实、模拟防真技术的可视化解决方案,我们日常可接触到的包括如科普场馆等寓教于乐的三维立体显示。成像技术不断发展,像素越来越高,我们能够在更大的屏幕上看到更清晰明亮、色彩丰富、的视频和图形,但它们始终有一个限制,即它们是二维的。我们眼睛所看到的真实世界不只是简单的平面图像,而是具有景深的立体3维,这种感知3维的能力是视网膜不一
致(或称为左右眼看一个物体位置的轻微偏移)的一个副功能。因此如果要设计一个立体投影系统,它必须要模拟人类在观看物体时视网膜成像的这种视差。这种感觉暗示我们,看到的就是真实的(或几乎是真实的),而不是平面的2维的。2技术原理由于人眼有4的距离,所以实际上我们看物体时两只眼睛中的图像是有差别的。两幅不同的图像输送到大脑后,我们看到的是有景深的图像。只要符合常规的观察角度,即产生合适的图像偏移,形成立体图像并不困难,这就是计算机和投影系统的立体成像原理。依据这个原理,结合不同的技术水平有不同的立体技术手段。从计算机和投影系统角度看,根本问题是图像的显示刷新率问题,即立体带宽指标问题。如果立体带宽足够,任何计算机、显示器和投影机显示立体图像都没有问题。2.1分类投影显示系统可以分为三类:·主动显示系统·被动显示系统光谱分割立体显示系统主动立体系统主动 立体投影系统的构成:·主动立体眼镜- 两个交替开关的LCD镜片·同步信号红外发射器·正常工作时需要投影机的输出刷新频率范围为96-144Hz(左右眼交替显示)·高分辨率高刷新率信号源·标准屏幕用一台输出刷新频率范围为96-144Hz的投影机将左右眼画面交替显示,实际画面的刷新频率为48-72Hz普通银幕,配置外部同步装置和主动立体眼镜,靠同步切换主动立
合成孔径声纳技术的研究进展及未来 张春华 刘纪元 (中国科学院声学研究所,北京 100080 ) The current developments and future of Synthetic Aperture Sonar Chunhua Zhang,Jiyuan Liu (Institute of Acoustics, Chinese Academy of Science Beijing 100080,China)Abstract: The background, principle, and applications of synthetic aperture sonar are presented in the paper. Current status of international developments is described and special attentions are paid to SAS study in China. Moreover, the future of Synthetic Aperture Sonar is discussed. Keywords:imaging Sonar, Synthetic Aperture Sonar, image reconstruction 关键词:声纳成像,合成孔径声纳,图像重建 1. 合成孔径声纳的产生背景 合成孔径声纳(Synthetic Aperture Sonar, 简称SA S)的原理研究从二十世纪六十年代 开始。美国Raytheon公司于1967年提出关于SAS可行性的报告,Walsh于1969年申请了第一个SAS专利。但当时主流观点认为有两个因素使得水下成像不适合合成孔径处理,这种观点在一段时间内对SAS的发展带来了消极影响。第一个因素是水声信道,特别是浅海水声环境条件不理想,同空气中电磁波工作环境相比,是更为“敌意”的媒质,回波信号的相干性能否支持合成孔径处理是个问题。另一个因素是声波传播速度比电磁波慢得多,大大限制了装载SAS的载体的运动速度,进而影响载体的稳定性,并限制了测绘速率的提高。 Williams于1976年、Christoff等人于1982年、Gough和Hayes等人于1989年进行 了一系列水声环境实验,结果表明,水声信道的影响并不像预想的那么严重,尽管水声信道是时变的,SAS回波信号在较短时间内仍具有较好的相干性,水声信号的相干性一般能够满足合成孔径成像要求。声传播速度慢导致信号空间采样率低和限制SAS载体运动速度等问题也可以通过多子阵的办法来弥补。 合成孔径成像在雷达(SAR)领域取得的成功,推动了合成孔径声纳技术的发展。由于 合成孔径成像的相似性,SAS可借鉴SAR中的技术成果,SAR中的成像算法可用在SAS中。 受SAR成功的鼓舞,一些国家自80年代以来进行了较多的水声环境和合成孔径声纳成像试验,并开始研制原理样机。目前国际上已经出现多个SAS实验样机系统。面向商用实用设备也已经出现。 六十至七十年代发表的少量SAS研究方面的文章,主要是探讨SAS基本原理[1][2]。八十年代SAS研究方面的文献也较少,主要集中在信号处理方法[3][4]、水声相干性测量[5][6]、及SAS原理样机[7][8] 的等方面。进入九十年代,SAS研究开始活跃起来,有大量的文章发表。IEEE Oceanic Engineering 1992年第1期出版了SAS专辑, IEE Proceedings-Radar, Sonar and Navigation 1996第3期也出版了合成孔径成像专辑,内容涉及SAS系统设计和成像算法等方面。此外,每年的IEEE Conference on Ocean都有SAS文章发表,美国声学 会议、欧洲水声会议、欧洲水下防务会议等也常有SAS文章出现。九十年代文献中涉及较多的是SAS信号处理、SAS系统设计、SAS实验结果,SAS在猎雷等方面的应用等。水声环境对成像的影响也比七十和八十年代相干性研究更深化,并有专门的国际会议[9]讨论水声环境对SAS成像质量影响。
《声纳原理》课程教学大纲 一、课程基本信息 1、课程代码:0330190 2、课程名称(中文):声纳原理课程名称(英文):Principles of Sonar 3、学时/学分:48/6 4、先修课程:水声学原理与换能器基阵,0330140 5、面向对象:信息对抗技术专业 6、开课院(系):航海学院声学与信息工程系 7、教材、教学参考书: 教材: 《声呐技术》,田坦、刘国枝、孙大军编,哈尔滨工程大学出版社,2000年教学参考书: 《数字式声纳设计原理》,李启虎,安徽教育出版社,2002年 Underwater Acoustic System Analysis, Williams S. Burdic, Prentice Hall, 1991 二、课程性质和任务 航海学院信息对抗技术专业主要为国防水声行业培养人才,故本课程是该专业的专业必修课程。通过本课程的学习,期望学生掌握声纳的基本工作原理,主要是声纳的波束形成方法、测向方法、测距方法和测速方法。在掌握这些方法之后,学生需要通过参与课堂演示实验深入理解这些方法的实际运用。最后,结合主讲教师的科研经历,向学生介绍当前国内外最先进的声纳系统的基本系统结构以及工作原理,从而为学生将来从事水声科研工作奠定基础。 三、教学内容和基本要求 声纳原理的教学内容分为八部分,具体内容和相应的基本要求如下(括号中标识数字为该部分的计划学时):
第一章绪论(4) 1.声纳的发展简史和现状 2.声纳系统的分类 3.声纳系统的战术指标和技术指标 4.声纳方程 要求:了解声纳的发展简史和现状,掌握声纳系统的分类方法和主要战术指标、技术指标,熟练掌握声纳方程及其内涵。本部分将采用中英文对照授课。 第二章声纳系统定向方法(4) 1.声纳系统定向的基本原理 2.最大值测向 3.相位法测向 4.振幅差值测向法 5.相关法测向 6.互谱法精确测向 要求:理解声纳系统定向的基本原理;熟练掌握最大值测向方法、相位法测向;了解振幅差值测向法、相关测向法;掌握互谱法精确测向。 第三章声纳的波束形成技术(8) 1.声纳波束形成的一般原理 2.直线多波束阵的有关问题 3.直线阵相移波束形成器 4.直线阵时延波束形成器 5.圆阵波束形成 6.频域波束形成 7.接收方向性指数
万方数据
万方数据
万方数据
万方数据
万方数据
水声信号处理领域若干专题研究进展 作者:李启虎, LI Qihu 作者单位:中国科学院声学研究所 刊名: 应用声学 英文刊名:APPLIED ACOUSTICS 年,卷(期):2001,20(1) 被引用次数:26次 引证文献(26条) 1.王成.王英民.陶林伟.甘甜等效试验法在双基地声纳试验中的应用[期刊论文]-压电与声光 2010(3) 2.王永衡基于无线电的声纳浮标阵式水声定位系统研究[期刊论文]-中国科技博览 2010(34) 3.郭良涛.黄建国.韩晶.阎振华基于DSP的小型数字语音通信平台设计[期刊论文]-计算机测量与控制 2009(6) 4.綦辉.蔡云祥.宋裕农基于UUV支持的水下协同作战研究[期刊论文]-火力与指挥控制 2009(3) 5.孙凤宇浅海水声语音通信软件无线电系统设计研究[期刊论文]-中国科技信息 2008(18) 6.何成兵.黄建国.张涛.阎振华单载波频域均衡高速水声通信仿真研究[期刊论文]-系统仿真学报 2007(23) 7.郑翠娥.孙大军.张殿伦.李想超短基线定位系统安装误差校准技术研究[期刊论文]-计算机工程与应用 2007(8) 8.周浩.蒋兴舟.袁志勇基于波束域MUSIC方法的高分辨方位估计[期刊论文]-海军工程大学学报 2007(2) 9.刘林泉.梁国龙.吴波.周志强.李宏伟一种低能耗的水声通信编码方案的研究[期刊论文]-声学技术 2007(1) 10.陈家财超声水处理功率放大技术研究[学位论文]硕士 2007 11.李姗.江南.黄建国基于随机水面阵列构形的水下GPS定位算法[期刊论文]-仪器仪表学报 2006(z3) 12.韦周芳.黄建国基于MFSK的多载波水声通信系统及实验研究[期刊论文]-无线通信技术 2006(2) 13.SUN Guiqing.LI Qihu.ZHANG Bin Acoustic vector sensor signal processing[期刊论文]-声学学报(英文版) 2006(1) 14.杨娟基于干涉谱分析的单水听器被动定位技术研究[学位论文]硕士 2006 15.徐复被动声纳仿真信号源研究与实现[学位论文]硕士 2006 16.罗丹噪声目标广义互相关被动测距研究[学位论文]硕士 2006 17.陈勇水声远程通信的联合频率相位调制技术研究[学位论文]硕士 2006 18.尹力.仲顺安.陈越洋.党华水声通信系统中信号同步的一种实现方法[期刊论文]-信号处理 2005(z1) 19.马雯.黄建国.张群飞用MFSK调制实现水声远程信息传输[期刊论文]-电讯技术 2004(5) 20.李洪升基于计算智能的声呐盲波束形成算法研究[学位论文]博士 2004 21.梁迅光纤水听器数据的网络传输及集群处理[学位论文]硕士 2004 22.赵羽矢量阵阵处理研究[学位论文]博士 2004 23.宋新见数字式噪声目标被动测距声纳研究[学位论文]博士 2004 24.马雯.黄建国基于时延编码的远程水声通信技术研究[期刊论文]-计算机工程与应用 2002(9) 25.潘仲明.杨俊.王跃科超声波扩频测距及其信道自适应均衡技术[期刊论文]-国防科技大学学报 2002(6) 26.马雯.黄建国.张群飞用时延编码实现远程水声通信[期刊论文]-电讯技术 2002(4) 本文链接:https://www.doczj.com/doc/1711480380.html,/Periodical_yysx200101001.aspx
【知识】潜艇的“耳目”―声纳系统 09-03-23 作者:编辑:hrbue 利用水下声波实现水下信息传递和探测的设备的总称:其英文sonar 为”sound navigation and ranging ”的缩写,音译为“声纳”,意译为声导航和测距。声纳在军事上可用于对敌舰艇的搜索、跟踪、识别和定位,实现水下通信、导航:民用上可用于海底测绘、石油勘探和探鱼等。声纳种类很多,按用途分,有测距声纳、综合声纳、侦察声纳、识别声纳、通信声纳,报警声纳、探鱼声纳、探雷声纳、导航声纳等;按装载体分,有舰用声纳、潜用声纳、航空声纳(吊放声纳及浮标声纳)、岸用声纳等。按基阵结构和布设方式分,有吊放式声纳、拖曳式声纳、合成孔径声纳、参量阵声纳、舰壳声纳等:按信号来源分、有主动声纳、被动声纳;按波束特征分,有单波束声纳、多波束声纳、扫描声纳、旁视声纳主动声纳又称有源声纳。通过向水下发射声波并利用回声来获取水下目标信息的声纳。现代的主动声纳是大功率、全景或多波束覆盖的,并使用多种发射信号波形。主动声纳通常安装在潜艇、水面舰艇以及直升机或固定翼飞机上(主动式声纳浮标)。主动声纳是反潜战装备的重要组成部分,能直接给出目标距离、方位。水中目标向着接近或远离声纳的方向运动将改变接收回波的频率,这叫做多普勒效应。主动声纳可利用多普勒效应获得目标的距离变化率,并减小混响的影响。潜艇通常由若干种声纳组成统一的声纳体系。到目前为止,潜艇声纳体系还是以噪音站为主,回音站为次,其它为辅助设备。噪音站是一种被动声纳,回音站是一种主动声纳。 声纳 声纳的原理由于电磁波在水中衰减的速率非常的高,无法做为侦测的讯号来源,以声响讯号探测水面下的人造物体成为运用最广泛的手段。声纳的英文原名SONAR来自于「音响导航与测距」(sound navigation and ranging)的缩写,无论是潜艇或者是水面船只都利用这项技术的衍生系统探测水地下的物体或者是做为导航的依据。声纳系统可以大致上分为两类:主动与被动。主动声纳会自己发生音响讯号,藉由这个讯号接触物体后反射回来的变化,做为计算这个物体的相对方位与距离的数据。被动声纳的作用和收听装置极为相近,不发出任何讯号,只接收来自于周遭的各种音响讯号来判断与识别不同的物体。传统上潜艇安装声纳的主要位置是在最前端的位置,由于现代潜艇非常依赖被动声纳的探测效果,巨大的收音装置不仅仅让潜艇的直径水涨船高,原先在这个位置上的鱼雷管也得乖乖让出位置而退到两旁去。其它安装在潜艇上的声纳型态还包括安装在艇身其它位置的被动声纳听音装置,利用不同位置收到的同一讯号,经过计算机处理和运算之后,就可以迅速的进行粗浅的定位,对于艇身较大的潜艇来说比较有利,因为测量的基线较长,准确度较高。另外一种声纳称为「拖曳声纳」,因为这种声纳装置在使用时,以缆线与潜艇连接,声纳的本体则远远的拖在潜艇的后面进行探测,拖曳声纳的使用大幅强化潜艇对于全方位与不同深度的侦测能力,尤其是潜艇的尾端。这是因为潜艇的尾端同时也是动力输出的部分,由于水流的声音的干扰,位于前方的声纳无法听到这个区域的讯号而形成一个盲区。使用拖曳声纳之后就能够消除这个盲区,找出躲在这个区域的目标。 潜望镜 潜望镜使用在潜艇上的历史比声纳还要久,美国南北战争期间使用的龟形人力小潜艇已经使用类似简单潜望镜的光学装置作为航行时的导航依据。潜望镜利用光学镜面反射的原理,在一个长管子的两端安装镜片,上端的镜片会将面对的影像向下反射,位于底部的镜片将反射过来的影像作第二次反射,观测人员透过底部的反射镜就可以看到上方镜面对准的方向上的影像。透过这个装置,潜艇内部的人员可以对周遭的环境进行肉眼的实际观测。在作战上,潜望镜也是辨识目标种类与敌我的重要手段。潜望镜通常提供两种倍率,一种放大倍率较小但是视野范围较广,适合快速的搜索周遭的海域,另外一种倍率较大,提供潜艇识别与判断目标动向的能力。二次大战以后有些公司推出的产品将两者的功能分开到个别的搜