
边界条件类型
5.1 惯性边界条件
5.1.1 加速度
1.简介
加速度以长度比上时间的平方为单位作用在整个模型上。由于加速度施加到系统上,惯性将阻止加速度所产生的变化,因此惯性力的方向与所施加的加速度的方向相反。加速度可以通过定义部件或者矢量进行施加。该边界条件支持显示动力学分析,谐响应分析,刚体动力学分析,静态结构分析和瞬态结构动力学分析。该边界条件支持二维模型和三维模型,并且支持矢量和分量定义。
2.定义方法
在支持的求解环境中,右击求解类型,选择Insert>Acceleration,则在细窗口出现定义加速度设置面板,该面板包括两个选项:模型范围选择(Scope)和定义方法(Definition)。
(1)范围选择
对于该边界条件条件,程序会默认的选择所有模型,并且不能进行人工选择。
(2)定义方法
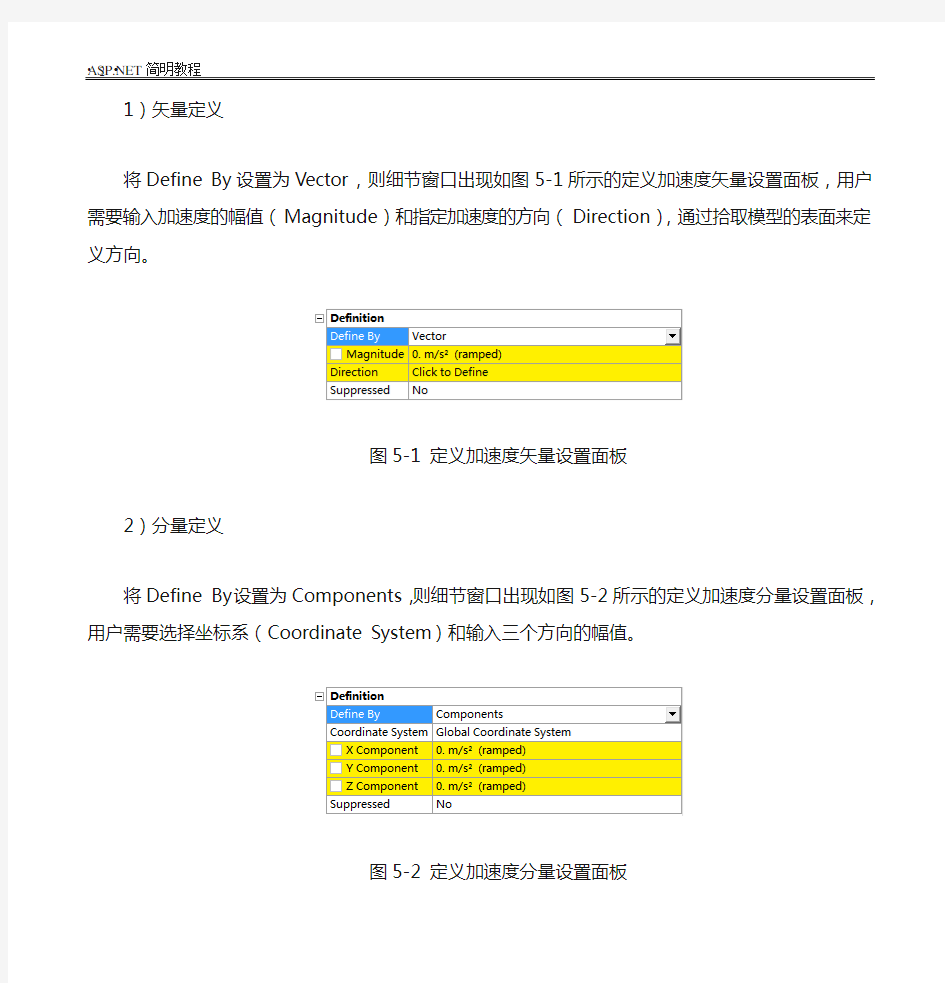
1)矢量定义
将Define By设置为Vector,则细节窗口出现如图5-1所示的定义加速度矢量设置面板,用户需要输入加速度的幅值(Magnitude)和指定加速度的方向(Direction),通过拾取模型的表面来定义方向。
图5-1 定义加速度矢量设置面板
2)分量定义
将Define By设置为Components,则细节窗口出现如图5-2所示的定义加速度分量设置面板,用户需要选择坐标系(Coordinate System)和输入三个方向的幅值。
https://www.doczj.com/doc/018864117.html,简明教程
? 2 ?
图5-2 定义加速度分量设置面板
5.1.2 标准的地球重力
1.简介
可以作为一个载荷施加。其值为9.80665 m/s2 (在国际单位制中),标准的地球重力载荷方向可以沿总体坐标轴的任何一个轴。不需要定义与其实际相反的方向得到重力的作用力。该边界条件适用于显示动力学,刚体动力学,静力学分析和瞬态结构动力学分析的二维或三维模型。
2.定义方法
在支持的求解环境中,右击求解类型,选择Insert>Standard Earth Gravity,则在细窗口出现如图5-3所示的定义重力加速度设置面板,该面板包括两个选项:模型范围选择(Scope)和定义方法(Definition)。
图5-3定义重力加速度设置面板
(1)范围选择
对于该边界条件条件,程序会默认的选择所有模型,并且不能进行人工选择。
(2)定义方法
如图5-3所示,在定义方法选项中用户只能修改三个选项:坐标系(Coordinate System),忽略(Suppressed)和重力加速度的方向(Direction)。坐标系可以使用默认的总体笛卡尔坐标系也可使用自定义的笛卡尔坐标系,但是不能使用柱坐标系,用户可以根据需要设置6个方向的重力加速度。
第1章https://www.doczj.com/doc/018864117.html,概述? 3 ?5.1.3 转动速度
1.简介
转动速度是另一个可以实现的惯性载荷。整个模型围绕一根轴在给定的速度下旋转,可以通过定义一个矢量来实现,给定转速大小和旋转轴;也可以通过分量来定义,在总体坐标系下指定点和分量值。
2.激活方法
在支持的求解环境中,右击求解类型,选择Insert>Rotational Velocity,则在细节窗口出现如图5-4所示的定义转速的设置面板,该面板暴力两个个选项:模型范围选择(Scope)和定义方法(Definition)。
图5-4 定义转速的设置面板
(1)范围选择
如图5-4所示,在Scope选项中主要需要设置选择方法(Scoping Method),用户可使用直接拾取几何体(Geometry)或使用名字选择(Named Selection)。
(2)定义方法
转速支持矢量(Vector)和分量(Component)定义,使用矢量定义转速,需要输入转速的大小和定义转轴;使用分量定义转速,需要至少输入一个方向的转速,并且使用坐标定义转轴的位置。
5.2 载荷类型边界条件
5.2.1 压力
https://www.doczj.com/doc/018864117.html,简明教程
? 4 ?
1.简介
压力只能施加在表面并且通常与表面的法向一致;正值代表进入表面(例如压缩)负值代表从表面出来(例如抽气等);压力的单位为每个单位面积上力的大小,即Pa。如图5-5所示给出了施加压力示意图。该边界条件支持谐响应分析,显示动力学分析,结构静力学分析和瞬态动力学分析。
图5-5 施加压力示意图
2.激活方法
在支持的求解环境中,右击求解类型,选择Insert>Pressure,则在细节窗口出现如图5-6所示的定义压力的设置面板,该面板包括个选项:模型范围选择(Scope)和定义方法(Definition)。
图5-6 定义压力的设置面板
(1)范围选择
如图5-6所示,在Scope选项中主要需要设置选择方法(Scoping Method),用户可使用直接拾取几何体(Geometry)或使用名字选择(Named Selection)。
(2)定义方法
压力支持矢量(Vector),分量(Component)和法向(Normal)定义,使用矢量定义压力,需要输入压力的大小和方向;使用分量定义压力,需要至少输入一个方向的压力,并且使用坐标系定义压力方向;使用法向定义,则只需输入压力的大小。
第1章 https://www.doczj.com/doc/018864117.html, 概述 ? 5 ?
5.2.2 静水压力
1.简介
静水压力模拟由于流体重力产生的压力,使用静水压力可以定义线性分布压力。它的计算公式如下:
()0h h a p -=ρ (5-1)
其中:p -静水压力;ρ-流体的密度;a -流体的加速度;h -模型任意一点到液面的距离;0h -自由液面的高度,即静水压力为0的位置。h 的取值必须大于等于0h ,如果h 的取值小于0h ,则静水压力为0。
2.激活方法
在支持的求解环境中,右击求解类型,选择Insert>Hydrostatic Pressure ,则在细节窗口出现如图5-7所示的定义静水压力的设置面板,该面板包括四个选项:模型范围选择(Scope ),定义方法(Definition ),静水的加速度(Hydrostatic Acceleration )和自由面位置(Free Surface Location )。图5-8给出了在图5-7中设置后产生的静水压力云图。
图5-7 定义静水压力设置面板 图5-8 施加的静水压力
(1)范围选择 如图5-7所示,在Scope 选项中主要需要设置选择方法(Scoping Method ),用户
https://www.doczj.com/doc/018864117.html,简明教程
? 6 ?
可使用直接拾取几何体(Geometry)或使用名字选择(Named Selection),此外如果模型为壳体,还需要设置Shell Face,用户可以根据需要选择壳体顶面(Top)或壳体底面(Bottom)。
(2)定义方法
在该选项用户可以设置施加静水压力的参考坐标系和流体密度(Fluid Density)。
(3)静水加速度
在该选项用户可以设置施加静水加速度的方法,包括矢量和分量方法,如果选择矢量方法,则需要输入加速度的大小和矢量方向;如果选择分量方法,则根据需要输入至少一个方向的加速度,加速度与施加的静水压力的递减方向相反,如果用户想定义向下的重力,则需输入向上的重力加速度。
(4)自由面位置
该选项用来定义静水压力为0的参考面,如图5-8所示,将模型的顶边定义为参考面,则在该顶边下方开始计算静水压力。
5.2.3 集中力
1.简介
力可以施加在结构的最外面,边缘或者表面如图5-9所示。力将分布到整个结构当中去。这就意味着假如一个力施加到两个同样的表面上,每个表面将承受这个力的一半。力单位为质量*长度/时间2。力可以通过定义矢量,大小以及分量来施加。
图5-9 力载荷
2.激活方法
在支持的求解环境中,右击求解类型,选择Insert>Force,则在细节窗口出现如图5-10所示的定义集中力的设置面板,该面板包括两个选项:模型范围选择(Scope),定义方法(Definition)。
(1)范围选择
如图5-10所示,在Scope选项中主要需要设置选择方法(Scoping Method),用户可使用直接拾取几何体(Geometry)或使用名字选择(Named Selection)。
第1章https://www.doczj.com/doc/018864117.html,概述? 7 ?
(2)定义方法
集中力支持矢量(Vector)和分量(Component)定义,使用矢量定义集中力,需要输入集中力的大小和方向;使用分量定义集中力,需要至少输入一个方向的压力,并且可以为集中力设置参考坐标系。
图5-10 定义集中力的设置面板
5.2.4 远端力
1.简介
允许在面或者边上施加偏置的力,设定力的初始位置(利用顶点,圆或者x,y,z的坐标),力可以通过矢量和大小或者分量来定义,这个在面上将得到一个等效的力加上由于偏置的力所引起的力矩,这个力分布在表面上,但是包括了由于偏置力而引起的力矩。远端力可以施加在空间的任意位置,它的理论根据为工程力学中的力的平移定理。该定理叙述如下:
如图5-11所示,作用在物体上的力F可以平行移动到物体内任一点O,但必须同时附加一个力偶,才能与原来的作用等效。其附加力偶的力偶矩等于原力F对平移点O 的力矩。这就是力的平移定理。
图5-11 力的平移定理
https://www.doczj.com/doc/018864117.html,简明教程
? 8 ?
2.激活方法
在支持的求解环境中,右击求解类型,选择Insert>Remote Force,则在细节窗口出现如图5-10所示的定义集中力的设置面板,该面板包括三个选项:载荷作用范围(Scope),定义方法(Definition)和高级选项(Advanced)。
图5-12 定义远端力的设置面板
(1)载荷作用范围
如图5-11所示,施加远端力需要设置两个位置A和B,在图5-12中Scope选项中使用鼠标拾取或实体名字选择的模型对应于位置B,然后使用Scope选项中的三个坐标确定位置A,当A和B位置重合时,则该载荷的作用效果等效与集中力。
(2)定义方法
远端力支持矢量(Vector)和分量(Component)定义,使用矢量定义远端力,需要输入远端力的大小和方向;使用分量定义远端力,需要至少输入一个方向的远端力,此外用户还可以设置作用载荷实体面的行为(Behavior),程序目前支持三种行为:刚体(Rigid),变形体(Deformable)和耦合(Coupled)。刚体表明选择施加远端力的作用面在求解中不会发生变形,变形体表明选择施加远端力的作用面在求解中会发生变形,耦合表明选择施加远端力的作用面与下伏单元具有相同的自由度。
图5-13和图5-14分别给出了耦合作用面和柔性变形作用面对应的总体变形云图,由图可知,将远端力作用面设置为耦合,则该作用面的法向保持不变,而将远端力作用面的设置为柔性或刚体,则该作用面会随着载荷变形而移动。
(3)高级选项
该选项主要用来定义球形区域的半径,默认情况为包括整个模型,对于复杂模型为
第1章https://www.doczj.com/doc/018864117.html,概述? 9 ?
了缩短计算时间,用户可以直接输入球形半径值,但是该球形半径值必须要把远端力的作用面包括在里面,否则求解时就会报错。
图5-13 耦合作用面的总体变形云图图5-14 柔性变形作用面的总体变形云图5.2.5 轴承载荷
1.简介
轴承载荷仅适用于圆柱形表面。其径向分量将根据投影面积来分布压力载荷。轴向载荷分量沿着圆周均匀分布。一个圆柱表面只能施加一个轴承载荷。假如一个圆柱表面切分为两个部分,那么在施加轴承载荷的时候一定要保证这两个柱面都要选中。载荷的单位同力的单位。
2.激活方法
在支持的求解环境中,右击求解类型,选择Insert>Bearing Load,则在细节窗口出现如图5-15所示的定义轴承载荷的设置面板,该面板包括两个选项:载荷作用范围(Scope)和定义方法(Definition)。
(1)载荷作用范围
如图5-15所示,在Scope选项中主要需要设置选择方法(Scoping Method),用户可使用直接拾取几何体(Geometry)或使用名字选择(Named Selection)。
(2)定义方法
https://www.doczj.com/doc/018864117.html,简明教程
? 10 ?
轴承载荷支持矢量(Vector)和分量(Component)定义,使用矢量定义轴承,需要输入轴承载荷的大小和方向;使用分量定义集中力,需要至少输入一个方向的轴承压力,并且可以为轴承载荷设置参考坐标系。
图5-15 定义轴承载荷的设置面板
如图5-16给出了竖直向上轴承载荷径向力分布图,由图可知,轴承载荷的径向力实际值作用于半个圆柱面,并且与轴承载荷方向相同的圆柱面的径向力最大,而与轴承载荷方向垂直的圆柱面径向力为0。
图5-16 竖直向上轴承载荷径向力分布图
5.2.6 螺栓预紧力
1.简介
在圆柱形截面上施加预紧载荷以模拟螺栓联接,螺栓预紧载荷只能在3D模拟中采用,需要定义一个以z轴为主方向的局部柱坐标系。允许多个实体施加一个预紧载荷,如一个螺栓载荷应用到划分为多体零件的螺栓上,如图5-17所示:
第1章https://www.doczj.com/doc/018864117.html,概述? 11 ?
图5-17 螺栓载荷
2.激活方法
在支持的求解环境中,右击求解类型,选择Insert>Bolt Pretension,则在细节窗口出现如图5-18所示的定义螺栓预紧力的设置面板,该面板包括两个选项:载荷作用范围(Scope)和定义方法(Definition)。
图5-18 定义螺栓预紧力的设置面板
(1)载荷作用范围
如图5-18所示,在Scope选项中主要需要设置选择方法(Scoping Method),用户可使用直接拾取几何体(Geometry)或使用名字选择(Named Selection)。
(2)定义方法
螺栓预紧力支持预紧力(Load),预紧位移(Adjustment),消除螺栓预紧力(Open)和锁定螺栓预紧力(Lock)。如果用户选择Load,则可以直接输入螺栓的预紧力,如果用户选择Adjustment,则可以直接输入螺栓的预紧位移,如果用户选择Open,则表示不考虑螺栓预紧力,如果用户选择Lock,则可以固定模型的所有位移,也就是保持现
https://www.doczj.com/doc/018864117.html,简明教程
? 12 ?
有的螺栓预紧力,该选项从第二个载荷步开始施加。
5.2.7 力矩
1.简介
对于实体,力矩可以施加在任意表面,假如选择了多个表面,那么力矩将分摊在这些表面上。力矩可以用矢量及其大小或者分量来定义。当用矢量表示时,其遵守右手法则。在实体表面,力矩也可以施加在顶点或边缘,这与通过矢量或分量定义的以表面为基础的力矩类似。力矩的单位为力乘上长度,见图5-19。
图5-19力矩载荷
2.激活方法
在支持的求解环境中,右击求解类型,选择Insert>Moment,则在细节窗口出现如图5-20所示的定义力矩的设置面板,该面板包括三个选项:载荷作用范围(Scope)和定义方法(Definition)和高级选项(Advanced)。
图5-20 定义力矩的设置面板
(1)载荷作用范围
如图5-20所示,在Scope选项中主要需要设置选择方法(Scoping Method),用户可使用直接拾取几何体(Geometry)或使用名字选择(Named Selection)。。
第1章https://www.doczj.com/doc/018864117.html,概述? 13 ?
(2)定义方法
力矩支持矢量(Vector)和分量(Component)定义,使用矢量定义力矩,需要输入力矩载荷的大小和方向;使用分量定义力矩,需要至少输入一个方向的力矩,并且可以为力矩设置参考坐标系。此外用户还可以设置作用载荷实体面的行为(Behavior),程序目前支持三种行为:刚体(Rigid),变形体(Deformable)和耦合(Coupled)。刚体表明选择施加力矩的作用面在求解中不会发生变形,变形体表明选择施加力矩的作用面在求解中会发生变形,耦合表明选择施加力矩的作用面与下伏单元具有相同的自由度。
(3)高级选项
该选项主要用来定义球形区域的半径,默认情况为包括整个模型,对于复杂模型为了缩短计算时间,用户可以直接输入球形半径值,但是该球形半径值必须要把远端力的作用面包括在里面,否则求解时就会报错。
5.2.8 线性压力
1.简介
线性压力只能用于三维模拟中,通过载荷密度形式给一个边上施加一个分布载荷,单位是单位长度上的载荷。如果用户将施加线性压力的边的几何参数进行了参数话,如果该边变大或缩小后,线性压力保持不变,但是总压力会随之增大或缩小。
2.激活方法
在支持的求解环境中,右击求解类型,选择Insert>Line Pressure,则在细节窗口出现如图5-21所示的定义线性应力的设置面板,该面板包括两个选项:载荷作用范围(Scope)和定义方法(Definition)。
图5-21 定义线性应力的设置面板
(1)载荷作用范围
如图5-21所示,在Scope选项中主要需要设置选择方法(Scoping Method),用户可使用直接拾取几何体(Geometry)或使用名字选择(Named Selection)。
(2)定义方法
线性压力支持矢量(Vector),分量(Component)和切向(Tangential)定义,使
https://www.doczj.com/doc/018864117.html,简明教程
? 14 ?
用矢量定义线性压力,需要输入线性压力的大小和方向;使用分量定义线性压力,需要至少输入一个方向的线性压力,并且可以为线性压力设置参考坐标系;使用切向定义线性压力,只需要输入线性压力的大小。
5.2.9 PSD基础激励
1.简介
PSD基础激励载荷主要用于随机振动分析,PSD也成为功率谱密度,Workbench目前支持加速度,重力加速度,速度和位移功率谱密度四种类型的PSD基础激励载荷。PSD的基础激励载荷的作用位置由进行模态分析是定义的完全固定支撑(Fixed Support,),位移约束(Displacement),远端位移(Remote Displacemen)和体-地面的弹簧连接(Body-to-Ground Spring)位移约束决定。用户可以施加多个非关联的PSD基础激励载荷。
2.激活方法
在支持的求解环境中,右击求解类型,选择Insert>PSD,则在细节窗口出现如图5-22所示的定义PSD基础激励的设置面板,该面板包括两个选项:载荷作用范围(Scope)和定义方法(Definition)。
图5-22 定义PSD基础激励设置面板
(1)载荷作用范围
如图5-22所示,在Scope选项中只需要设置边界条件,PSD支持固定约束,位移约束,远端位移约束和体-地面的弹簧连接位移约束,这些约束只有在之前的模态分析中定义过后,才能在PSD基础激励载荷中使用。
(2)定义方法
该选项主要包括载荷数据(Load Data)和激励方向(Direction)两个选项,使用载荷数据用户可以输出PSD值与对应的频率值,如图5-23所示的定义PSD值与频率的表格,用户根据需要进行输入PSD值和对应的频率值。在激励方向上,用户可以根据进行选择,如X轴,Y轴或Z轴。
第1章https://www.doczj.com/doc/018864117.html,概述? 15 ?
图5-23 定义PSD值与频率的表格
5.2.10 RS基础激励
1.简介
RS基础激励载荷主要用于响应谱分析,RS也称为响应谱。对于每一个响应谱值都对应着一个频率。RS的基础激励只能作用在模态分析时定义的位移约束,并仅有完全固定的自由度才对该载荷有效。Workbench目前支持加速度,速度和位移四种类型的RS 基础激励载荷。用户只能在总体笛卡尔坐标系下指定RS基础激励载荷。
2.激活方法
在支持的求解环境中,右击求解类型,选择Insert>RS,则在细节窗口出现如图5-24所示的定义RS基础激励的设置面板,该面板包括两个选项:载荷作用范围(Scope)和定义方法(Definition)。
图5-24 定义RS基础激励设置面板
(1)载荷作用范围
如图5-24所示,在Scope选项中只需要设置边界条件,并且只能选择All BC Supports。
(2)定义方法
该选项主要包括载荷数据(Load Data),比例系数(Scale Factor)
第五章 边界条件 5-1 FLUENT 程序边界条件种类 FLUENT 的边界条件包括: 1, 流动进、出口边界条件 2, 壁面,轴对称和周期性边界 3, Internal cell zones :fluid, solid (porous is a type of fluid zone ) 4, Internal face boundaries :fan, radiator, porous jump, wall, interior 5-2 流动进口、出口边界条件 FLUENT 提供了10种类型的流动进、出口条件,它们分别是: ★一般形式: ★可压缩流动: 压力进口 质量进口 压力出口 压力远场 ★不可压缩流动: ★特殊进出口条件: 速度进口 进口通分,出口通风 自由流出 吸气风扇,排气风扇 进口 出口 壁面 orifice (interior) orifice_plate and orifice_plate-shadow 流体 Example: Face and Cell zones associated with Pipe Flow through orifice plate
1,速度进口(velocity-inlet):给出进口速度及需要计算的所有标量值。该边界条件适用于不可压缩流动问题,对可压缩问题不适用,否则该入口边界条件会使入口处的总温或总压有一定的波动。 2,压力进口(pressure-inlet):给出进口的总压和其它需要计算的标量进口值。对计算可压不可压问题都适用。 3,质量流进口(mass-flow-inlet):主要用于可压缩流动,给出进口的质量流量。对于不可压缩流动,没有必要给出该边界条件,因为密度是常数,我们可以用速度进口条件。4,压力出口(pressure-outlet):给定流动出口的静压。对于有回流的出口,该边界条件比outflow 边界条件更容易收敛。该边界条件只能用于模拟亚音速流动。 5,压力远场(pressure-far-field):该边界条件只对可压缩流动适合。 6,自由出流(outflow):该边界条件用以模拟在求解问题之前,无法知道出口速度或者压力;出口流动符合完全发展条件,出口处,除了压力之外,其它参量梯度为零。但并不是所有问题都适合,有三种情况不能用自由出流边界条件:包含压力进口条件;可压缩流动问题;有密度变化的非稳定流动(即使是不可压缩流动)。 7,进口通风(inlet vent):进口风扇条件需要给定一个损失系数,流动方向和环境总压和总温。 8,进口风扇(intake fan):进口风扇条件需要给定压降,流动方向和环境总压和总温。9,出口通风(out let vent):排出风扇给定损失系数和环境静压和静温。 10, 排气扇(exhaust fan):排除风扇给定压降,环境静压。 11,对称边界(symmetry):对称边界条件适用于流动及传热场是对称的情况。 12,周期性边界(periodic):如果我们关心的流动,其几何边界,流动和换热是周期性重复的,那么可以采取周期性边界条件。 13,固壁边界(wall):对于粘性流动问题,FLUENT默认设置是壁面无滑移条件。对于壁面有平移运动或者旋转运动时,可以指定壁面切向速度分量,也可以给出壁面切应力从而模拟壁面滑移。 5-3 速度进口边界条件(velocity-inlet) 给出进口速度及需要计算的所有标量值。该边界条件适用于不可压缩流动问题,对可压缩问题不适用,否则该入口边界条件会使入口处的总温或总压有一定的波动。 边界条件设置的主要输入量如图示,包括: ●速度大小,方向或各速度分量;Velocity magnitude and direction or velocity components ●周向速度(轴对称有旋流动);Swirl velocity (for 2D axisymmetric problems with swirl) ●静温(考虑能量);Temperature (for energy calculations) ●出流表压(对于耦合求解器);Outflow gauge pressure (for calculations with the coupled solvers) ●湍流参数(考虑湍流计算);Turbulence parameters (for turbulent calculations) ●……
COMSOL周期性边界条件的应用 在将真实的物理问题转化为仿真模型时,为了通过有限的计算资源获得尽可能高的计算精度,模型简化是必要的。模型简化的前提是所模拟的物理问题具有结构、材料属性及边界条件的对称性或均匀性,以此为基础,可通过特定的方程及边界条件建立模型,例如降维方程,镜像/周期性/旋转对称边界条件,或根据工程经验将某些计算域简化为边界等等。 当处理空间或时间上具有周期性的物理问题时,采用周期性边界条件(Periodic/Cyclic Condition),可将复杂结构的模拟简化为周期单元,在不失精确度的前提下,大大降低计算量。 COMSOL提供的周期性边界条件包括四种类型: ?连续性周期边界(Continuity),指在源和目标边界上的场值相等; ?反对称周期边界(Antiperiodicity),源和目标边界上场值符号相反; ?弗洛奎特周期性边界(Floquet periodicity),源和目标边界上场值相差一个位相因子,位相因子由波矢和边界相对距离确定。Continuity和Antiperiodicity边界可以认 为是Floquet periodicity边界在位相分别为0和π情况下的两个特例。 ?循环对称性边界(Cyclic Symmetry),源和目标边界上场值相差一个位相因子,位相因子由计算域所对应的扇形角和角向模式数决定。 以下是几个典型应用: 1.微纳光学领域内的光子晶体(Photonic Crystal)、表面等离子体激元(Surface Plasmon) 阵列结构及超材料(Metamaterial),这几种结构均由空间上周期性重复的散射体构 成,当计算透射率及能带结构时,常常可采用Floquet perioidcity边界将结构简化。 超材料能带分析 Metamaterial.mph 2.作为压电传感器件的声表面波器件(Surface Acoustic Wave, SAW)的本征频率问题 计算。
(第一边界条件)源代码: function y=yt1(x0,y0,f_0,f_n,x) _____________(1) %第一类边界条件下三次样条插值; %xi 所求点; %yi所求点函数值; %x 已知插值点; %y 已知插值点函数值; %f_0左端点一次导数值; %f_n右端点一次导数值; n = length(x0); z = length(y0); h = zeros(n-1,1); k=zeros(n-2,1); l=zeros(n-2,1); S=2*eye(n); fori=1:n-1 h(i)= x0(i+1)-x0(i); end fori=1:n-2 k(i)= h(i+1)/(h(i+1)+h(i)); l(i)= 1-k(i); end %对于第一种边界条件: k = [1;k]; _______________________(2) l = [l;1]; _______________________(3) %构建系数矩阵S: fori = 1:n-1 S(i,i+1) = k(i); S(i+1,i) = l(i); end %建立均差表: F=zeros(n-1,2); fori = 1:n-1 F(i,1) = (y0(i+1)-y0(i))/(x0(i+1)-x0(i)); end D = zeros(n-2,1);
fori = 1:n-2 F(i,2) = (F(i+1,1)-F(i,1))/(x0(i+2)-x0(i)); D(i,1) = 6 * F(i,2); end %构建函数D: d0 = 6*(F(1,2)-f_0)/h(1); ___________(4) dn = 6*(f_n-F(n-1,2))/h(n-1); ___________(5) D = [d0;D;dn]; ______________(6) m= S\D; %寻找x所在位置,并求出对应插值: fori = 1:length(x) for j = 1:n-1 if (x(i)<=x0(j+1))&(x(i)>=x0(j)) y(i) =( m(j)*(x0(j+1)-x(i))^3)/(6*h(j))+... (m(j+1)*(x(i)-x0(j))^3)/(6*h(j))+... (y0(j)-(m(j)*h(j)^2)/6)*(x0(j+1)-x(i))/h(j)+... (y0(j+1)-(m(j+1)*h(j)^2)/6)*(x(i)-x0(j))/h(j) ; break; else continue; end end end (2)(自然边界条件)源代码: 仅仅需要对上面部分标注的位置做如下修改: __(1):function y=yt2(x0,y0,x) __(2):k=[0;k] __(3):l=[l;0] __(4)+(5):删除 —(6):D=[0:D:0]
周期性边界条件 周期性边界条件用来解决,物理模型和所期待的流动的流动/热解具有周期性重复的特点。FLUENT提供了两种类型的周期性边界条件。第一种类型不允许通过周期性平面具有压降(对于FLUENT4用户来说:这一类型的周期性边界是指FLUENT4中的圆柱形边界)。第二种类型允许通过平移周期性边界具有压降,它是你能够模拟完全发展的周期性流动(在FLUENT4中是周期性边界)。 本节讨论了无压降的周期性边界条件。在周期性流动和热传导一节中,完全发展的周期性模拟能力得到了详尽的描述。 周期性边界的例子 周期性边界条件用于模拟通过计算模型内的两个相反平面的流动是相同的情况。下图是周期性边界条件的典型应用。在这些例子中,通过周期性平面进入计算模型的流动和通过相反的周期性平面流出流场的流动是相同的。正如这些例子所示,周期性平面通常是成对使用的。 Figure 1: 在圆柱容器中使用周期性边界定义涡流 周期性边界的输入 对于没有任何压降的周期性边界,你只需要输入一个东西,那就是你的所模拟的几何外形是旋转性周期还是平移性周期。(对于有周期性压降的周期流还要输入其它的东西,请参阅周期性流动和热传导一节。) 旋转性周期边界是指关于旋转对称几何外形中线形成了一个包括的角度。本节中的图一就是旋转性周期。平移性周期边界是指在直线几何外形内形成周期性边界。下面两图是平移性周期边界:
Figure 1: 物理区域 Figure 2: 所模拟的区域 对于周期性边界,你需要在周期性面板(下图)中指定平移性边界还是旋转性边界,该面板是从设定边界条件菜单中打开的。 Figure 3: 周期性面板 (对于耦合解算器,周期性面板中将会有附加的选项,这一选项允许你指定压力跳跃,详细内容请参阅周期性流动和热传导一节。) 如果区域是旋转性区域,请选择旋转性区域类型。如果是平移性就选择平移性区域类型。对
Midas各种边界条件比较 Midas的提供的边界条件非常多,而且各有用途,初学Midas的朋友们都想看看到底不同边界条件之间有什么区别,下面在Midas帮助文件选取下来的,只是作一个比较,各种边界条件的具体使用参照MIDAS帮助文件。 1.定义一般弹性支承类型 SDx-SDy 整体坐标系X轴方向和Y轴方向(或已定义的节点局部坐标系x方向和y方向)的相关弹性支承刚度。 注 一般弹性支承通常用于反映桩的支承刚度,结构分析时可以考虑与各个自由度有关的桩支承刚度。 在典型的建筑结构中,分析模型不包括桩基础。而是假定在基础底面或桩帽处存在弹性边界。下面的通用刚度给出了桩单元的实际刚度。对斜桩,用节点局部坐标轴计算斜向的刚度。 2.一般弹性支承 分配定义的一般弹性支撑类型,或输入节点通用刚度矩阵(6×6)。其中包括选定的节点在整体坐标系或节点局部坐标系内各自由度之间相关的刚度,也可以替换或删除先前定义的弹性支承刚度 SDxSDySDzSRxSRySRz 注 在一般弹性支承类型对话框中,上述6个弹性支承刚度值只表示6 x 6阶刚度矩阵中的6个对角线刚度值。实际分配给节点的刚度值为6 x 6阶刚度。 3.面弹性支承 输入平面或实体单元单位支承面上的弹簧刚度形成弹性支承。并可同时形成弹性连接的单元。 该功能主要用于在基础或地下结构分析中考虑地基的弹性支承条件。 弹性连接长度:弹性连接单元的长度。该数据对分析结果没有影响,只是为在分析中定义一个内部矢量。 只受拉,只受压:选中选项指定弹性连接为只受拉或只受压单元。 4.弹性连接 形成或删除弹性连接。由用户定义弹性连接及其弹性连接的两个节点。 SDxSDySDzSRxSRySRz。 5.一般连接特性值 建立、修改或删除非线性连接的特性值。一般连接功能应用于建立减隔振装置、只受拉/受压单元、塑性铰、弹性支撑等模型。一般连接可利用弹簧的特性,赋予线性或非线性的特性。 一般连接的作用类型分为单元类型和内力类型。 单元类型一般连接在进行分析过程中,用更新单元刚度矩阵直接反映单元的非线性。 内力类型的一般连接不更新单元刚度矩阵,而是根据非线性的特性计算出来的内力置换成外部荷载,间接的考虑非线性。 单元类型的一般连接提供的类型有弹簧、线性阻尼器、弹簧和线性阻尼器3种类型的连接单元。 内力类型的一般连接提供的类型有粘弹性消能器(Viscoelastic Damper)、间隙(Gap)、钩(Hook)、滞后系统(Hysteretic System)、铅芯橡胶支承隔震装置(Lead Rubber Bearing Isolator)、摩擦摆隔震装置(Friction Pendulum System Isolator)等六种类型的连接单元。 6.一般连接 添加或删除一般连接。由用户定义一般连接及其一般连接的两个节点。 一般连接特性值:选择非线性连接的特性。当需要建立或编辑非线性连接的特性值时,可以点击右面的,将弹出非线性连接特性值对话框。
[考试]在fluent中修改周期性边界条件中国振动联盟 标题: 在fluent中修改周期性边界条件,怎么不对啊 [打印本页] 作者: skgk-qqq 时间: 2012-2-26 09:39 标题: 在fluent中修改周期性边界 条件,怎么不对啊 我是在fluent主界面输入命令:grid mod check,然后回车,得到periodic zone[()],我再输入3,回车,shadow zonezone[()],我再输入10,回车,得到Rottional periodic,(if no,translational)[yes],然后回车,得到Create periodic zones?[yes],然后回车,得到zone 3;matched 0 out of 10854 faces. zone 10:matched 0 out of 10854 faces. Error: Failed to make zones periodic.ERROE:object:#f.请教各位了,着急啊~~~ 作者: skgk-qqq 时间: 2012-2-26 09:51 回复 1 # skgk-qqq 的帖子 各位大哥,帮帮忙啊,着急啊 作者: Seventy721 时间: 2012-2-26 11:01 大概是因为你的两个periodic面上的网格不完全一致,导致不能match。这两 个面的几何尺寸和网格划分必须完全一致。建议划分网格之前在两个面上建立 hard link,这样网格就会完全一样了。如果还不行就调整判断网格差异的tolerance,我记得用户手册里有说明,你找找看。 作者: skgk-qqq 时间: 2012-2-26 16:15 回复 3 # Seventy721 的帖子 我已经建立了link了啊,经过网格检查,网格单元数量也是一致的,而且输 出meh文件也正确,请问怎么调整tolerance啊,着急啊
浅话边界条件与初始条件 边界条件 在说边界条件之前,先谈谈初值问题和边值问题。 初值和边值问题: 对一般的微分方程,求其定解,必须引入条件,这个条件大概分两类---初始条件和边界条件,如果方程要求未知量y(x)及其导数y′(x)在自变量的同一点x=x0取给定的值,即y(x0 )=y0,y′(x0)= y0′,则这种条件就称为初始条件,由方程和初始条件构成的问题就称为初值问题; 而在许多实际问题中,往往要求微分方程的解在在某个给定的区间a ≤ x≤b 的端点满足一定的条件,如y(a) = A , y(b) = B则给出的在端点(边界点)的值的条件,称为边界条件,微分方程和边界条件构成数学模型就称为边值问题。 三类边界条件: 边值问题中的边界条件的形式多种多样,在端点处大体上可以写成这样的形式,Ay+By'=C,若B=0,A≠0,则称为第一类边界条件或狄里克莱(Dirichlet)条件;B≠0,A=0,称为第二类边界条件或诺依曼(Neumann)条件;A≠0,B≠0,则称为第三类边界条件或洛平(Robin)条件。 总体来说, 第一类边界条件:给出未知函数在边界上的数值; 第二类边界条件:给出未知函数在边界外法线的方向导数; 第三类边界条件:给出未知函数在边界上的函数值和外法向导数的线性组合。 对应于comsol,只有两种边界条件: Dirichlet boundary(第一类边界条件)—在端点,待求变量的值被指定。
Neumann boundary(第二类边界条件)—待求变量边界外法线的方向导数被指定。 再补充点初始条件: 初始条件,是指过程发生的初始状态,也就是未知函数及其对时间的各阶偏导数在初始时刻t=0的值.在有限元中,好多初始条件要预先给定的。不同的场方程对应不同的初始条件。 总之,为了确定泛定方程的解,就必须提供足够的初始条件和边界条件.边界条件与初始条件是控制方程有确定解的前提。边界条件是在求解区域的边界上所求解的变量或其导数随时间和地点的变化规律。对于任何问题,都需要给定边界条件。初始条件是所研究对象在过程开始时刻各个求解变量的空间分布情况,对于瞬态问题,必须给定初始条件,稳态问题,则不用给定。 对于边界条件与初始条件的处理,直接影响计算结果的精度。 在CFD模拟时,基本边界条件有: 1流动进口边界 包括速度进口边界,压力进口边界,质量进口边界(可压流动)。 在使用流动进口边界时,需要涉及到某些流动参数,如绝对压力,湍动能及耗散率,这些参数要做特殊考虑。关于参考压力,在流场数值计算中,压力总是按相对值表示的,实际求解的压力并不是绝对值,而是相对于进口压力而言的。 在有些情况下,可以通过设定进口压力为0,求解其他点的压力。还有时,为了减小数字截断误差,往往故意抬高或降低参考压力场的值,可使其余各处的计算压力场与整体数值计算的量级相吻合。 2流动出口边界 一般选在离几何扰动足够远的地方来施加。在这样的位置,流动是充分发展的,沿流动方向没有变化。该边界只有在进入计算域的流动是以进口边界条件给定时才使用,而且在只有一个出口的计算域中使用。
(第一边界条件)源代码:function y=yt1(x0,y0,f_0,f_n,x)_____________(1) %第一类边界条件下三次样条插值; %xi所求点; %yi所求点函数值; %x已知插值点; %y已知插值点函数值; %f_0左端点一次导数值; %f_n右端点一次导数值; n = length(x0); z = length(y0); h = zeros(n-1,1); k=zeros(n-2,1); l=zeros(n-2,1); S=2*eye(n); fori=1:n-1 h(i)= x0(i+1)-x0(i); end fori=1:n-2 k(i)= h(i+1)/(h(i+1)+h(i)); l(i)= 1-k(i);
end %对于第一种边界条件: k = [1;k];_______________________(2) l = [l;1];_______________________(3) %构建系数矩阵S: fori = 1:n-1 S(i,i+1) = k(i); S(i+1,i) = l(i); end %建立均差表: F=zeros(n-1,2); fori = 1:n-1 F(i,1) = (y0(i+1)-y0(i))/(x0(i+1)-x0(i)); end D = zeros(n-2,1); fori = 1:n-2 F(i,2) = (F(i+1,1)-F(i,1))/(x0(i+2)-x0(i)); D(i,1) = 6 * F(i,2); end %构建函数D: d0 = 6*(F(1,2)-f_0)/h(1);___________(4)
周期边界条件 aresaran (答网友问) (1)、究竟什么是"周期性边界条件"?如何去定义它的,为什么要引入这样一个定义。 周期边界条件源于这样的问题:宏观结构的信息不足以描述问题的细节,所以引入微观结构的信息来统计物质的宏观性质。周期边界条件广泛用于molecular dynamics & micromechanics. Fig1.细观力学的RVE 代表单元 尽管目前计算机的运算速度极大提高,但是仍然不能够用于进行大规模的宏微观联合计算。 因此引入了代表单元的概念,代表单元RVE 就如同是一个打开微观世界的一个窗口,看到的只是窗户里面的东西,我们假设整个微观世界是统计均匀的,因此无限量的复制了这个窗口,就可以得到所有微观信息。当然这个代表单元有要求,如上图,宏观结构尺寸远远尺寸,但是这个达标单元的尺寸又要能 足够多的包含微观颗粒的信息,有代表性,所以要求l L >>l A <<这是个一般性定义。 (2)、"周期性边界条件" 是不是只是在处理复合材料问题时才用,而且从众位大侠的讨论中似乎让我觉得这有点像"子结构"? Fig2. 2D or 3 D RVE
子结构和代表单元根本不在一个层次上,RVE 的建模与普通建模没什么区别,当然你想得到随机的微观结构,就需要用外部程序比如matlab 书写相应的inp 文件。 Fig3. Ref. Frederic Feyel. Multiscale elastoviscoplastic analysis of composite structures. Computational Materials Science,1999,16: 344~354 2FE 子结构模型适合多尺度计算。如图三,是一个发动机叶片,局部区域希望能够用细观微结构描述,其余结构希望是均匀材料。 这个问题的模型就可以将复合材料区域SiC/Ti 用子模型/子结构实现代表单元,子结构传递边界条件给代表单元, 实现微观和宏观的关联。 (3)、"周期性边条"是不是"旋转周期结构"里所需施加的边界条件? 对于复合材料层合壳体结构的旋转周期结构,相当于直角坐标周期结构的球坐标变换,物理意义等同。 (4)、为什么有些"轴对称单元"也在用这个? 因该是指对称性条件和周期性条件的关系,下面的例子会给出解释。 【1】周期边界条件的推导实例: ij 是边界上施加的的宏观应变条件 Displacement BC. j ij i i l x u y u ε+=)()( Traction BC. )()()()(x n x y n y j ij j ij σσ?=
1、如何利用板单元建立变截面连续梁(连续刚构)的模型建立模型后如何输入预应力钢束? 使用板单元建立连续刚构(变截面的方法)可简单说明如下: 1)首先建立抛物线(变截面下翼缘) ; 2)使用单元扩展功能由直线扩展成板单元,扩展时选择投影,投影到上翼缘处。; 3)在上翼缘处建立一直线梁(扩展过渡用),然后分别向横向中间及外悬挑边缘扩展成板单元; 4)使用单元镜像功能横向镜像另一半; 5) 为了观察方便,在单元命令中使用修改单元参数功能中的修改单元坐标轴选项,将板单元的单元坐标轴统一起来。在板单元或实体块单元上加预应力钢束的方法,目前设计人员普遍采用加虚拟桁架单元的方法,即用桁架单元模拟钢束,然后给桁架单元以一定的温降,从而达到加除应力的效果。温降的幅度要考虑预应力损失后的张力。这种方法不能真实模拟沿钢束长度方向的预应力损失量,但由于目前很多软件不能提供在板单元或块单元上可以考虑六种预应力损失的钢束,所以目前很多设计人员普遍在采用这种简化分析方法。 MIDAS目前正在开发在板单元和块单元上加可以考虑六种预应力损失的钢束的模块,以满足用户分析与设计的要求。 2、如果梁与梁之间是通过翼板绞接,Midas/Civil应如何建模模拟梁翼板之间的绞接? 可以在主梁之间隔一定间距用横向虚拟梁连接,并且将横向虚拟梁的两端的弯矩约束释放。此类问题关键在于横向虚拟梁的刚度取值。可参考有关书籍,推荐写的"Bridge deck behaviour",该书对梁格法有较为详尽的叙述。 3、如果梁与梁之间是通过翼板绞接,Midas/Civil应如何建模模拟梁翼板之间的绞接可否自己编辑截面形式 可以在定义截面对话框中点击"数值"表单,然后输入您自定义的截面的各种数据。您也可以在工具>截面特性值计算器中画出您的截面,然后生成一个截面名称,程序会计算出相应截面的特性值。您也可以从CAD中导入截面(比如单线条的箱型截面,然后在截面特性值计算器中赋予线宽代表板宽)。 4、如果截面形式在软件提供里找不到,自己可否编辑再插入变截面,如果我设计的桥梁是变截面但满足某一方程F(x),且截面形式Midas/civil里没有,需通过SFC计算再填入A、I、J等。也就是说全桥的单元截面都要用ACAD画出来再导入SFC,如果我划分的单元较小这样截面就很多很麻烦,SFC有没有提供象这种变截面的简单计算方法 目前MIDAS中的变截面组支持二次方程以下的小数点形式的变截面方程,如次等。您可以先在SPC中定义控制位置的两个变截面,然后用变截面组的方式定义方程。然后再细分变截面组。我们将尽快按您的要求,在变截面组中让用户可以输入方程的各系数。谢谢您的支持! >如果我设计的桥梁是变截面但满足某一方程F(x),且截面形式Midas/civil里没有,需通过SFC计算再填入A、I、J等。也就是说全桥的单元截面都要用ACAD画出来再导入SFC,如果我划分的单元较小这样截面就很多很麻烦,SFC有没有提供象这种变截面的简单计算方法
定解条件和定解问题 含有未知函数的偏导数的方程叫偏微分方程,常微分方程可以看成是特殊的偏微分方程。方程的分数是1的称为方程式,个数多于1的叫做方程组。方程(组)中出现的未知函数的最高阶偏导数的阶数称为方程(组)的阶数。如果方程(组)中的项关于未知函数及其各阶偏导数的整体来讲是线性的,就称方程(组)为线性的,否则就称为非线性的。非线性又分为半线性、拟线性和完全非线性。 一、定解条件 给定一个常微分方程,有通解和特解的概念。通解只要求满足方程,即满足某种物理定律,而不能完全确定一个物理状态。特解除了要求满足方程还要满足给定的外加(特殊)条件。对偏微分方程也是如此,换句话说,只有偏微分方程还不足以确定一个物理量随空间和时间的变化规律,因为在特定情况下这个物理量还与它的初始状态和它在边界受到的约束有关。描述初始时刻的物理状态和边界的约束情况,在数学上分别称为初始条件(或初值条件)和边界条件(或边值条件),他们统称为定解条件。 初始条件:能够用来说明某一具体物理现象初始状态的条件,即描述物理过程初始状态的数学条件。 边界条件:能够用来说明某一具体物理现象边界上的约束情况的条件,即描述物理过程边界状态的数学条件。 定解条件:初始条件和边界条件的统称。 非稳态问题:定解条件包括初始条件和边界条件。
稳态问题:定解条件为边界条件。 1、弦振动方程 ( 2(,),0,0tt xx u a u f x t x l t -=<<>) 初始条件是指初始时刻(0t =)弦的位移和速度。若以()x ?, ()x ψ分别表示弦上任意点x 的初始位移和初始速度,则初始条件为: 边界条件是指弦在两端点的约束情况,一般有三种类型。 (1)第一类边界条件(狄利克雷(Dirichlet )边界条件):已知端点()x a a o a l ===或处弦的位移是()a g t ,则边界条件为: (0,)(0,)u t g t = 或 (,)(,)u l t g l t = 当0()0()0l g t g t ≡≡或时,表示在该点处弦是固定的。 (2)第二类边界条件(诺伊曼(Neumann )边界条件):已知端点0x x l ==或处弦所受的垂直于弦线的外力0()g t 或()l g t ,则边界条件为: 0(0,)()x Tu t g t -= 或 (,)()x l Tu l x g t = 当00()0l g g t ≡≡或时,表示弦在端点0x x l ==或处自由滑动。 (3)第三类边界条件(混合边界条件或罗宾(Robin )边界条件:已知端点处弦的位移和所受的垂直于弦线的外力的和: 000(0,)(0,)g (t),0,x Tu t k u t k -+=> 或 (,)(,)(),0x l l l Tu l t k u l t g t k +=>, (,0)(),0(,0)(), t u x x x l u x x ?ψ=?<
1.固体物理教材在晶格振动、金属电子论、能带理论三个地方都用到了周期性 边界条件,试比较其异同并阐述你的理解。 周期性边界条件是边界条件的一种,反映的是如何利用边界条件替代所选部分(系统)受到周边(环境)的影响。可以看作是如果去掉周边环境,保持该系统不变应该附加的条件,也可以看作是由部分的性质来推广表达全局的性质。 周期性边界条件的引入有两个目的:在粒子的运动过程中,若有一个或几个粒子跑出模型,则必有一个或几个粒子从相反的界面回到模型中,从而保证该模拟系统的粒子数恒定;计算原子间作用力的时候采取最近镜像方法,这样模型中处于边界处的原子受力就比较全面,从而消除了边界效应。这种方法在计算机分子动力学模拟中使用非常广泛。 由此,在讨论晶格振动、金属电子论、能带理论的周期性边界条件时只是在不同的范围中周期性边界条件具体的定义、应用以及意义。 晶格振动的周期性边界条件:由N个原子组成一个模型——原子数目有限,但各原子完全等价。第j个原子的运动与第 mN+j个原子的运动情况完全一样。对于原子的自由运动,边界上的原子与其它原子一样,无时无刻不在运动,对于有N个原子原子链,硬性设定u1=0,uN=0的边界条件是不符合事实的。其实不论什么边界条件都与事实不符合,但为了求近似解,必须选取一个边界条件,晶格振动谱的实验测定是对晶格振动理论的最有力验证,周期性边界条件是晶格振动理论的前提条件。 金属电子论的周期性边界条:.金属中自由电子气应该服从量子力学规律,在保留独立电子近似和自由电子近似基础上应通过求解薛定愕方程给出电子本征态和本征能量,从而来解释金属性质。我们把自由电子气等效为在温度 T=0K,V =L3的立方体内运动的 N个自由电子。独立电子近似使我们可以把 N个电子问题转换为单电子问题处理。要计算一系列想关函数都与波矢 k有关。波矢 k 的取值要由边界条件决定,边界条件的选取既要反映出电子是在有限体积中运动的特点,又要在数学上便于操作,因此,类似于晶格振动是的情况,周期性边界条件(Born-Karman边界条件)是人们通常采用的最适合的方法。 能带理论的周期性边界条件:能带论的基本出发点是认为固体中的电子不再是完全被束缚在某个原子周围,而是可以在整个固体中运动的,称之为共有化电子。但电子在运动过程中并也不像自由电子那样,完全不受任何力的作用,电子在运动过程中受到晶格原子势场和其它电子的相互作用。能带理论是基于三个基本(近似)假设:1)Born-Oppenheimer 绝热近似:离子的波函数与电子的位置及状态无关:多粒子问题→多电子问题2)Hatree-Fock平均场近似:忽略电子与电子间的相互作用,用平均场代替电子与电子间的相互作用:多电子问题→单电子问题。3)周期场近似:单电子问题→单电子在周期场中运动问题。由于这三个基本假设,每个电子都处在完全相同的严格周期性势场中运动,因此每个电子的运动都可以单独考虑。在计算电子运动的薛定谔方程时,由于势场的周期性反映了晶格的平移对称性,可定义一个平移算符,为了确定平移算符的本征值,引入周期性边界条件。
ABAQUS旋转周期对称边界条件的设置 旋转周期对称设置包括:旋转周期对称设置,外加主面上的对称面约束,两者一起构成旋转对称的边界条件。下面所述的两种方法是仅针对旋转周期对称的设置。 两种方法: 1)修改inp文件: 找到*End Assembly,将之替换为 *TIE,CYCLIC SYMMETRY,NAME=TIE-CYCLIC Surf-Cylic-SLAVE,Surf-Cylic-MASTER ** *End Assembly ** *CYCLIC SYMMETRY MODEL,N=60 0,0,0,0,0,1 --------------------------- 上面设置中包括:主面的设置,从面的设置,模型周期的数目,以及旋转轴。因此需要建立这两个面的集合:Surf-Cylic-MASTER,Surf-Cylic-SLAVE。N=60表示有60个。0,0,0为旋转轴的起点,0,0,1为旋转轴的终点。 2)直接在前处理cae中设置 首先,建立主面和从面的集合,便于选取; 其次,为旋转轴的起点和终点建立参考点(RP),旋转轴一定要设在整个模型的旋转中心上;参考点可通过输入坐标的方式建立。注意:其他方式建立点都不可行,以下详述。 最后,输入周期的数目,本模型为整体模型的多少分之一,即输入倒数即可。 以上步骤参见下图。 【旋转轴起点和终点的建立】 1)除参考点以外其他的建点的方式不行,比如建立datum point,无法在viewport中直接选中,同样建立集合时也选不中datum point。 2)使用attachment point建立的点虽然可以直接在viewport中选中,建立集合时也可选中,但无法写入inp文件,当write inp 文件时就造成cae崩溃直接退出软件! 总之,旋转轴的设置,直接在前处理cae界面中设置,不如直接在inp文件中修改方便!因为修改inp旋转轴只要直接给定起点和终点坐标就OK,省去先建立RP点的步骤。 【主面上设置对称面】 在边界条件中选对称面设置即可。先要建立一个柱坐标系为好。将柱坐标系的Z轴建在旋转中心上,R轴在模型两对称侧面的平分线上,T轴即自动建好为切线方向。对称边界设置时,选取之前建立的主面,方向为U2=UR1=UR3=0,此即为T轴为对称面的法线方向。 【补充说明】 对于一个具体的部件,除上述约束外,根据实际情况还需加上其他约束条件避免存在任何刚体位移的出现。如Z向(轴向)上避免刚体位移,径向上避免刚体位移。 下文算例中的详情看文末的总结。
Part I.部分使用说明 1. 定义移动荷载的步骤 l 在主菜单的荷载>移动荷载分析数据>车辆中选择标准车辆或自定义车辆。 l 对于人群移动荷载,按用户定义方式中的汽车类型中的车道荷载定义成线荷载加载(如将规范中的荷载0.5tonf/m**2乘以车道宽3m,输入1.5tonf/m)。定义人群移动荷载时,一定要输入Qm和Qq,并输入相同的值。集中荷载输入0。 l 布置车道或车道面(梁单元模型选择定义车道,板单元模型选择定义车道面),人群荷载的步行道也应定义为一个车道或车道面。 l 定义车辆组。该项为选项,仅用于不同车道允许加载不同车辆荷载的特殊情况中。 l 定义移动荷载工况。例如可将车道荷载定义为工况-1,车辆荷载定义为工况-2。在定义移动荷载工况对话框中的子荷载工况中,需要定义各车辆要加载的车道。例如: 用户定义了8个车道,其中4个为左侧偏载、4个为右侧偏载,此时可定义两个子荷载工况,并选择“单独”,表示分别单独计算,程序自动找出最大值。在定义子荷载工况时,如果在“可以加载的最少车道数”和“可以加载的最大车道数”中分别输入1和4,则表示分别计算1、2、3、4种横向车辆布置的情况(15种情况)。布置车辆选择车道时,不能包含前面定义的人群的步行道。 l 定义移动荷载工况时,如果有必要将人群移动荷载与车辆的移动荷载进行组合时,需要在定义移动荷载工况对话框中的子荷载工况中,分别定义人群移动荷载子荷载工况(只能选择步道)和车辆的移动荷载子荷载工况,然后选择“组合”。 2. 关于移动荷载中车道和车道面的定义 l 当使用板单元建立模型时 a. 程序对城市桥梁的车道荷载及人群荷载默认为做影响面分析,其他荷载(公路荷载和铁路荷载)做影响线分析。 b. 只能使用车道面定义车的行走路线。对于城市桥梁的车道荷载及人群荷载以外的荷载,输入的车道面宽度不起作用,按线荷载或集中荷载加载在车道上。
第二章思考题 1、什么是傅里叶导热定律?它的意义是什么? 傅里叶定律:在任意时刻,各向同性连续介质内任意位置处的热流密度在数值上与该点的温度梯度的大小成正比,方向相反。 意义:它揭示了导热热流与局部温度梯度之间的内在关系,是试验定律。 2、傅里叶定律中并没有出现时间,能否用来计算非稳态导热过程中的导热量? 可以用来计算非稳态导热过程中的导热量 3、试举例说明影响导热系数的因素有哪些? 物性参数,与物质的几何形状,质量体积等因素无关 主要取决于物质的种类、结构、密度、温度、压力和含湿量等 有些材料,如木材、结构体、胶合板等还与方向有关(各向异性材料)有关 4、什么是保温材料?选择和安装保温材料是应注意哪些问题? 习惯上吧导热系数较小的材料称为保温材料(又称隔热材料或绝热材料)。 保温材料要注意防潮、防水。 5、推导导热微分方程式时依据的原理和定律是什么? 依据:能量守恒定律和导热定律 6、说明直角坐标系下的导热微分方程的适用条件。 某均质、各向同性物体内发生着导热过程,内部有强度为Φ的均匀内热源。 7.具体导热问题完整的数学描述应包括哪些内容? 答:(1)导热微分方程 () λ φ ρ τ ? + ? ? + ? ? + ? ? = ? ? 2 2 2 2 2 2 z t y t x t ct 【直角坐标系】 (2)单值性条件 8.何谓导热问题的单值性条件?它包括哪些内容? 答:(1)单值性条件:对问题予以描述的说明或限定性条件 (2)内容 ①几何条件:规定了导热物体的几何形状和尺寸。 ②物理条件:说明了导热物体的物理特征,如物体的热物性参数的大小及其 随其他参数(如温度)的变化规律,是否有内热源,其大小和分布情况。 ③初始条件:时间条件,给出了过程开始时刻物体内的分布状况。 ④边界条件:规定了物体在边界上与外界环境之间在换热上的联系或相互作 用。 9.试分别用数学语言及传热术语说明导热问题三种类型的边界条件。 答:(1)第一类边界条件。规定了导热物体在边界上的温度,
1、如何利用板单元建立变截面连续梁(连续刚构)的模型?建立模型后如何输入预应力钢束? 使用板单元建立连续刚构(变截面的方法)可简单说明如下: 1)首先建立抛物线(变截面下翼缘) ; 2)使用单元扩展功能由直线扩展成板单元,扩展时选择投影,投影到上翼缘处。;3)在上翼缘处建立一直线梁(扩展过渡用),然后分别向横向中间及外悬挑边缘扩展成板单元; 4)使用单元镜像功能横向镜像另一半; 5) 为了观察方便,在单元命令中使用修改单元参数功能中的修改单元坐标轴选项,将板单元的单元坐标轴统一起来。在板单元或实体块单元上加预应力钢束的方法,目前设计人员普遍采用加虚拟桁架单元的方法,即用桁架单元模拟钢束,然后给桁架单元以一定的温降,从而达到加除应力的效果。温降的幅度要考虑预应力损失后的张力。这种方法不能真实模拟沿钢束长度方向的预应力损失量,但由于目前很多软件不能提供在板单元或块单元上可以考虑六种预应力损失的钢束,所以目前很多设计人员普遍在采用这种简化分析方法。 MIDAS目前正在开 发在板单元和块单元上加可以考虑六种预应力损失的钢束的模块,以满足用户分析与设计的要求。 2、如果梁与梁之间是通过翼板绞接,Midas/Civil应如何建模模拟梁翼板之间 的绞接? 可以在主梁之间隔一定间距用横向虚拟梁连接,并且将横向虚拟梁的两端的弯矩约束释放。此类问题关键在于横向虚拟梁的刚度取值。可参考有关书籍,推荐 E.C.Hambly写的"Bridge deck behaviour",该书对梁格法有较为详尽的叙述。 3、如果梁与梁之间是通过翼板绞接,Midas/Civil应如何建模模拟梁翼板之间 的绞接?可否自己编辑截面形式 可以在定义截面对话框中点击"数值"表单,然后输入您自定义的截面的各种数据。您也可以在工具>截面特性值计算器中画出您的截面,然后生成一个截面名称,程序会计算出相应截面的特性值。您也可以从CAD中导入截面(比如单线条的箱型截面,然后在截面特性值计算器中赋予线宽代表板宽)。 4、如果截面形式在软件提供里找不到,自己可否编辑再插入变截面,如果我设计的桥梁是变截面但满足某一方程F(x),且截面形式Midas/civil里没有, 需通过SFC计算再填入A、I、J等。也就是说全桥的单元截面都要用ACAD画出来再导入SFC,如果我划分的单元较小这样截面就很多很麻烦,SFC有没有提供象这种变截面的简单计算方法 目前MIDAS中的变截面组支持二次方程以下的小数点形式的变截面方程,如1.5次等。您可以先在SPC中定义控制位置的两个变截面,然后用变截面组的方式定义方程。然后再细分变截面组。我们将尽快按您的要求,在变截面组中让用户可以输入方程的各系数。谢谢您的支持! >如果我设计的桥梁是变截面但满足某一方程F(x),且截面形式Midas/civil里没有,需通过SFC计算再填入A、I、J等。也就是说全桥的单元截面都要用ACAD画出来再导入SFC,如果我划分的单元较小这样截面就很多很麻烦,SFC有没有提供象这种变截面的简单计算方法 5.弯桥支座如何模拟?用FCM建模助手建立弯箱梁桥模型后,生成的是梁单元(类似平面杆系),请问在如何考虑横向的问题?(假如横向设置两个抗扭支座,分别计算每个支座的反力)?采用梁单元能否计算横向的内力和应力(例如扭距、横梁的横向弯距等)?提个建议,因建模后梁单元已赋予了箱型截面,横向尺寸
(第一边界条件源代码: function y=yt1(x0,y0,f_0,f_n,x _____________(1 %第一类边界条件下三次样条插值; %xi 所求点; %yi所求点函数值; %x 已知插值点; %y 已知插值点函数值; %f_0左端点一次导数值; %f_n右端点一次导数值; n = length(x0; z = length(y0; h = zeros(n-1,1; k=zeros(n-2,1; l=zeros(n-2,1; S=2*eye(n; fori=1:n-1 h(i= x0(i+1-x0(i; end fori=1:n-2
k(i= h(i+1/(h(i+1+h(i; l(i= 1-k(i; end %对于第一种边界条件: k = [1;k]; _______________________(2 l = [l;1]; _______________________(3 %构建系数矩阵 S : fori = 1:n-1 S(i,i+1 = k(i; S(i+1,i = l(i; end %建立均差表: F=zeros(n-1,2; fori = 1:n-1 F(i,1 = (y0(i+1-y0(i/(x0(i+1-x0(i; end D = zeros(n-2,1; fori = 1:n-2 F(i,2 = (F(i+1,1-F(i,1/(x0(i+2-x0(i; D(i,1 = 6 * F(i,2;
end %构建函数 D : d0 = 6*(F(1,2-f_0/h(1; ___________(4 dn = 6*(f_n-F(n-1,2/h(n-1; ___________(5 D = [d0;D;dn]; ______________(6 m= S\D; %寻找 x 所在位置,并求出对应插值: fori = 1:length(x for j = 1:n-1 if (x(i<=x0(j+1&(x(i>=x0(j y(i =( m(j*(x0(j+1-x(i^3/(6*h(j+... (m(j+1*(x(i-x0(j^3/(6*h(j+... (y0(j-(m(j*h(j^2/6*(x0(j+1-x(i/h(j+... (y0(j+1-(m(j+1*h(j^2/6*(x(i-x0(j/h(j ; break; else continue; end end end (2 (自然边界条件源代码: 仅仅需要对上面部分标注的位置做如下修改 :