基于PLC的新型育苗播种机控制系统的设计_张向峰.pdf
- 格式:doc
- 大小:267.00 KB
- 文档页数:3

基于PLC的蔬菜捆扎机自动控制系统的设计作者:张钦冯金冰殷红梅来源:《机电信息》2020年第27期摘要:设计了一种以FX3U-48MT PLC为控制核心的蔬菜捆扎装置,介绍了捆扎机总体方案设计、硬件PLC电路设计等。
阐述了捆扎机的手动、自动等控制方式,给出了PLC控制电路、硬件连接电路、触摸屏界面显示电路设计。
该捆扎机主要解决了现有人工蔬菜捆扎方式易疲劳、效率低下、包装不统一的问题。
另外,触摸屏对工作有实时监控的效果,人机界面良好。
样机实验结果表明,捆扎机运行效果良好。
关键词:PLC;捆扎;控制系统;触摸屏0 ; ;引言我国是农业大国,但农业生产自动化、智能化程度不高,与西方发达国家有一定差距。
为全面建成小康社会,在全面脱贫攻坚的大背景下,伴随着我国人口的老龄化趋势,大力发展农业现代化技术具有很强的现实意义。
大规模种植是农民发家致富的普遍手段。
蔬菜作为一种经济作物,是农民创收的有效途径。
大规模蔬菜种植,蔬菜的捆扎和包装是进行运输和销售的重要环节。
自动捆扎蔬菜可以有效提高蔬菜捆扎的效率和质量,降低劳动力成本。
本文首先分析了蔬菜捆扎的动作组成,然后以PLC作为核心控制部件,设计了一套蔬菜捆扎控制系统,并在实践中加以应用。
1 ; ;系统组成蔬菜全自动捆扎设备是自动包装机械的一种,其结构主要由上料机构、传输机构、成形与捆扎机构三大部分组成,能够实现从散装蔬菜到成形捆扎整个流程,捆扎速度快。
其传输机构的组成如图1所示,成形系统的组成如图2所示。
电气控制系统采用220 V交流电源和空气压缩泵提供压缩空气作为系统能源。
操作人员通过触摸屏操作,蔬菜经过上料机构、传输机构、成形与捆扎机构实现自动捆扎。
各种机构的动作通过PLC来控制。
2 ; ;PLC控制系统设计2.1 ; ;动作流程根据客户要求,本系统可完成自动动作和单步手动动作。
具体动作流程如下:手动方式下:(1)储物槽开闭;(2)输送槽移动;(3)成形孔的开启、闭合;(4)包装切断与停止。


基于PLC的自动灌溉控制系统设计--本科毕业设计Water is an essential ___ use of water resources in today's society has caused great waste。
In China。
such as Gansu and Shaanxi。
water resources are scarce。
and people's daily water use cannot be guaranteed。
so people need to use water resources ___。
mainly because people use flood n。
which not only wastes water resources but also ___。
this article designs a PLC control systemfor an automatic ___。
the structure and working principle of the automatic ___ determine the control requirements。
and then hardware and are design are carried out。
The hardware design mainly includes PLC n。
I/O n table。
and I/O external wiring diagram。
The are design includes control flow chart design and ladder diagram program design。
The system uses PLC technology as the control core。
making it smaller in size。

智能播种机器人控制系统设计王㊀雷,陈炳羽,朱正凡(甘肃畜牧工程职业技术学院,甘肃武威733006)摘㊀要:为进一步提高作物播种自动化水平和生产效率,该文详细阐述了智能播种机器人硬件系统㊁软件系统的设计,以及关键部件的选型,通过构建智能播种机器人路径规划算法,实现农田环境感知和作物信息处理,达到精准的播种路径规划和种子分配㊂通过田间试验,验证了所设计控制系统的可行性和有效性㊂结果表明,通过划分区域㊁设定优先级和避障策略,实现了高效的播种路径规划㊂关键词:智能播种机器人;控制系统;感知;决策;路径规划中图分类号:TP242;S223.2㊀㊀㊀㊀㊀㊀文献标识码:Adoi :10.14031/ki.njwx.2024.02.003Design of Control System for Intelligent Seeding RobotWANG Lei,CHEN Bingyu,ZHU Zhengfan(Gansu Polytechinc College of Animal Husbandry &Engineering,Wuwei 733006,China)Abstract :In order to further improve the automation level and production efficiency of crop seeding,this paper elabo-rates the design of the hardware system and software system of the intelligent seeding robot,as well as the selection of key components,and realizes the perception of farmland environment and crop information processing by constructing the path planning algorithm of the intelligent seeding robot,so as to achieve accurate seeding path planning and seed distri-bution.Through field experiments,the feasibility and effectiveness of the designed control system are verified.The re-sults show that efficient seeding path planning is achieved by dividing areas,setting priorities and obstacle avoidancestrategies.Key words :intelligent seeding robot;control system;perception ;decision making;path planning基金项目:2023年甘肃省教育科技创新项目(2023A -282);2021年度武威市科技计划项目(ww2101008)作者简介:王雷(1985 ),男,甘肃武威人,本科,高级实验师,研究方向为机械制造自动化㊂0㊀引言智能播种机器人作为现代农业生产的重要设备,为农作物的种植和生产带来了全新的机遇和挑战㊂智能播种机器人是一种基于先进感知㊁定位㊁控制和自主决策技术的自动化农业装备,通过整合多种传感器和算法,准确地在农田中完成播种任务,优化种植布局,提高生产效率[1-3],并在作物生长周期内进行数据记录与分析㊂与传统播种方式相比,智能播种机器人有提高生产效率㊁精确播种㊁减少劳动力成本㊁环保与可持续性㊁数据驱动决策㊁适应多样化需求等优势[4]㊂为进一步完善智能播种机器人的理论基础与系统优化,本文对智能播种机器人硬件及软件组成进行分析,并提出基于优先级的往复式覆盖算法,考虑作物的生长需求㊁土壤特性等因素,通过合理的优先级安排,使机器人能够在农田中以往复式作业的方式覆盖整个种植区域,保证作物的均匀分布,提高播种效率[5]㊂最后通过田间试验,验证该系统的有效性与稳定性㊂研究结果旨在为智能播种机器人的理论发展和系统优化提供实质性指导㊂1㊀智能播种机器人控制系统设计1.1㊀硬件系统设计硬件部分涵盖了机器人的物理组件,在硬件部分中,智能播种机器人基于电源模块,通过主控电路㊁传感器系统(超声波传感器㊁土壤湿度传感器和红外传感器)㊁执行模块组成(图1)㊂1.1.1㊀主控电路主控电路是智能播种机器人的核心,本文选择主控芯片为STM32F407㊂STM32F407是意法半导体推出的一款高性能STM32微控制器,采用ARM Cortex -M4内核,具备丰富的外设接口㊁强大的计算能力和广泛的开发支持,非常适合复杂农田应用场景[6]㊂本文将图像处理㊁路径规划和躲避障碍物等功能融入控制系统,机器人通过分析感知数据和预定算法,做出智能决策㊂控制算法程序如图2所示㊂1.1.2㊀程序下载电路本文选择的STM32F407芯片下载方式主要分为3种[7]㊂1)ST -Link 调试器/编程器㊂ST -Link 是意法半导体提供的一种常用调试和编程工具,使用ST -Link 调试器通过SWD (Serial Wire Debug)接口与STM32F407芯片进行连接,实现程序下载㊁调试和实时监测㊂此方法可以与多种集成开发环境(IDE)如Keil㊁STM32CubeIDE 和TrueSTUDIO 等配合使用㊂2)USB Bootloader㊂STM32F407芯片通常提供内置的USB Bootloader,允许通过USB 接口进行固件更新㊂通过将芯片连接到计算机的USB 接口,使用特定的工具或软件进行程序下载㊂该方法特别图1㊀智能播种机器人硬件系统结构示意图图2㊀主控电路算法程序示例适用于在没有调试器的情况下更新程序㊂3)外部编程器/烧录器㊂除了ST -Link,还有许多第三方编程器和烧录器也支持STM32F407芯片的下载㊂这些工具通常提供更多灵活性和适用性,尤其是在批量生产和量产时,使用外部编程器需要配置相应的软件和硬件,确保与目标芯片之间的正常通信㊂本文采用SWD (Serial Wire Debug )接口与STM32F407芯片进行连接,实现程序下载㊁电路设计,程序下载电路原理如图3所示㊂图3㊀程序下载电路原理图1.1.3㊀超声波传感器模块检测电路超声波传感器不需要与物体直接接触就可以测量出与周围物体的距离[8],本文选取HC -SR04超声波传感器,通过GPIO 引脚与微控制器连接,发送触发信号,然后测量返回脉冲的时间㊂本文超声波传感器安装位置如表1所示,电路原理图如图4所示㊂表1㊀智能播种机器人超声波传感器安装位置传感器位置功能前方避免碰撞㊁规避障碍物,确保前方路径安全后方倒退时避免碰撞,调整位置时避免撞到后方障碍物两侧在狭窄空间中行驶时避免碰撞,确保两侧安全底部在不平整地形上保持稳定高度㊁姿态,适应不同地形播种器部分确保种子适当放置,控制播种深度和密度图4㊀超声波模块电路图设计1.1.4㊀电磁阀控制电路㊀㊀STM32F407通过GPIO 引脚来控制电磁阀的驱动,电路设计原理如图5所示㊂将电磁阀的线圈连接到STM32F407的一个GPIO 引脚,后在STM32F407的软件代码中,配置相应的GPIO 引脚为输出模式㊂最后根据需要,通过控制GPIO 引脚的高低电平,向电磁阀的线圈提供电流,以打开或关闭阀门[9]㊂STM32CubeIDE 和HAL 库的C 代码如下://设置GPIO 引脚HAL_GPIO_WritePin(GPIO_PORT,GPIO_PIN,GPIO_PIN_SET);//打开电磁阀//延迟一段时间,保持电磁阀打开状态HAL_GPIO_WritePin(GPIO_PORT,GPIO_PIN,GPIO_PIN_RESET);//关闭电磁阀㊀㊀1.2㊀软件设计软件部分则负责控制硬件以实现预定的任务和功能㊂智能播种机器人控制系统软件程序主要包括主程序㊁超声波检测子程序和电磁阀控制子程序㊂1.2.1㊀主程序设计主程序是整个智能播种机器人控制系统的核心,负责协调各个子系统的操作,从传感器获取数据并做出决策,控制执行器执行相应动作㊂主程序往往包括任务调度㊁环境感知㊁路径规划㊁决策制定等功能[10]㊂本文主程序工作流程图,如图6所示㊂1.2.2㊀子程序设计1)超声波传感器㊂超声波传感器控制子程序用于获取超声波传感器测量的距离数据,并根据这些数据做出决策,本节以智能播种机器人避开障碍物或调整路径控制程序为例进行分析,子程序如图7所示㊂图5㊀电磁阀控制电路原理图图6㊀主程序流程图㊀㊀2)电磁阀控制㊂电磁阀控制子程序根据系统的需要,控制电磁阀的开关状态,从而实现播种机器人的种子释放㊂在子程序设计中,一般使用 OPEN 和 CLOSE 控制电磁阀的开关状态,如图8所示㊂2㊀智能播种机器人路径规划算法智能播种机器人的路径规划算法旨在确定最佳的播种路径,使机器人能够在农田中高效地播种而不碰撞障碍物㊂本文选择基于优先级的往复式覆盖算法,使智能播种机器人在农田中高效播种,同时避开障碍物㊂基于优先级的往复式覆盖算法,给农田划分成不同的区域,并为每个区域分配优先级,实现机器人的路径规划,其核心思想为机器人首先沿着高优先级区域进行播种,然后按相反方向往复地覆盖低优先级区域,确保农田得到完整的覆盖[11-12]㊂主要工作流程如下:1)农田划分㊂将农田分成一定数量的小区域,图7㊀超声波传感器控制子程序图8㊀电磁阀控制子程序示例每个小区域都对应一个播种任务㊂2)优先级分配㊂为每个小区域分配一个优先级,通常可以基于播种需求㊁土壤条件㊁作物类型等因素来确定优先级㊂3)往复式覆盖㊂机器人从最高优先级的区域开始,沿着预定的路径进行播种㊂完成一条路径后,机器人返回起始点,然后按相反方向在低优先级区域上进行往复式覆盖㊂4)避障处理㊂在往复覆盖过程中,机器人需要通过传感器检测障碍物㊂如果检测到障碍物,机器人会采取相应的行动,如绕开障碍物或暂时停止㊂5)路径优化㊂在往复式覆盖的过程中,可以使用路径规划算法,优化机器人的轨迹,以减少路径长度和时间㊂3㊀田间试验本文基于智能播种机器人硬件系统,结合优先级的往复式覆盖算法,对该系统在田间路径规划效果㊁播种精度及播种效率进行试验与分析㊂选取遗传算法及粒子群算法为对照,以本研究提出的基于优先级的往复式覆盖算法为参考,开展系统测试,智能播种机器人田间路径规划结果如表2所示㊂结果表明,粒子群算法表现出较好的路径规划效果,所有区域几乎都被覆盖,播种精度也较高,有时会遇到障碍物未能完全避开,导致播种路径中断,部分种子可能偏离目标位置㊂基于优先级的往复式覆盖算法能够更好地根据不同区域的优先级进行播种,时间效率较高,但稍慢于粒子群算法㊂4㊀结论本文对智能播种机器人控制系统的技术方案进行了全面讨论和研究,如控制系统设计和路径规划算法优化㊂主要研究结果如下㊂1)本文选择了高性能的STM32F407主控芯片作为核心,通过GPIO引脚控制电磁阀来实现种子释放㊂超声波传感器模块被设置在不同位置,用于测量与周围物体的距离,从而实现顺利避障㊂表2㊀不同算法下田间路径规划结果场景路径规划算法覆盖效果避障表现时间效率播种精度1粒子群算法较好,几乎所有区域都被覆盖有时遇到障碍物未能完全避开高效,完成任务时间较短较准确,部分种子偏离目标位置2基于优先级的往复式覆盖算法优先级高区域被首先覆盖有效地避开障碍物较高效,稍慢于粒子群算法准确,种子基本在目标位置3遗传算法整体覆盖效果不错,但可能出现间隙随机性较大,有时避障不够灵活较慢,算法迭代时间较长相对准确,但存在一些偏差㊀㊀2)在软件程序设计中,主程序作为核心,协调各子系统进行任务调度㊁环境感知㊁路径规划和决策制定,实现机器人的运动和播种操作㊂3)基于优先级的往复式覆盖算法作为路径规划策略,通过划分区域㊁设定优先级和避障策略,实现了高效的播种路径规划㊂田间试验结果分析验证了该算法的有效性,不同算法在不同场景下的表现也得到了比较和评估㊂参考文献:[1]㊀潘超然.玉米精量播种机播种质量监测与调控系统设计[J].农机使用与维修,2023(1):38-40.[2]㊀王宝梁.多功能自主农业机器人研制[D].南京:南京农业大学,2013.[3]㊀候玉强,李俊伟,徐洛川,等.智能播种监测装置的研究进展[J].新疆农机化,2023(3):21-23+41. [4]㊀夏兴宇.马铃薯精量播种智能测控系统研究[D].合肥:中国科学技术大学,2022.[5]㊀吴亮,吴燕,鄢强,等.施肥机器人结构及控制系统设计[J].广西农业机械化,2020(3):29-31.[6]㊀Yakoubi M A,Laskri M T.The path planning of cleanerrobot for coverage region using genetic algorithms[J].Journal of innovation in digital ecosystems,2016,3(1):37-43.[7]㊀曹世佳.基于图像识别的种植机器人的研究与应用[D].石家庄:河北科技大学,2019.[8]㊀聂杨.智能割草机器人的关键技术研究[D].重庆:重庆大学,2018.[9]㊀董文浩.基于嵌入式系统的机器视觉杂交稻智能恒量播种装置研究[D].广州:华南农业大学,2020. [10]Dusadeerungsikul P O,Nof S Y.A collaborative controlprotocol for agricultural robot routing with online adapta-tion[J].Computers&Industrial Engineering,2019,135:456-466.[11]康海艳.玉米生产中的精量播种作业及精确控制技术研究[J].农机使用与维修,2021(1):117-118. [12]李国辉.农业机器人避障路径智能规划研究[J].农机化研究,2021,43(3):236-239.(02)。

湖南工业职业技术学院Hunan Industry Polytechnic题目基于PLC的自动浇灌系统设计系名称电气工程系专业及班级机电S2012-1班学生姓名学号44指导教师摘要随着数字化的快速发展,越来越多的数字化和信息化手段应用到了各个领域之中。
传统的浇灌方式灌水量多、耗水量大,不能适时适量的浇灌,造成了水资源的极大浪费,与我国建设节约型社会的发展战略极不协调。
传统浇灌设备大多采用继电器控制,调试与维护苦难,灵敏度不够高,不能实现根据外界环境变化控制浇灌。
可编程控制器(PLC)具有提高可靠性、增加灵活性和适用于各种环境条件下运行等优点,并且在系统硬件组成不变的情况下,可以通过更改软件设置来适用多种运行方式的需要、是传统继电器控制的理想替代品。
本课题以PLC为核心,外围由温度、湿度传感器及必要输入输出设备电路、水泵等组成。
通过相应的传感器获取外界环境参数,经过一定的逻辑运算后控制水泵的启动或者停止来进行自动的浇灌。
为防止水泵过于频繁的启停,应在控制逻辑决策时加入一定的简单控制策略。
本系统能够在自动模式与手动模式之间进行自由切换。
该系统能够提高灌溉效率,达到节能节水的目的,同时,能减轻浇灌人员的劳动负担,将科学的浇灌经验固化在控制器中,降低了对种植经验的要求,有利于提高生产效率。
关键词:PLC,温度、湿度传感器,水泵。
目录第1章绪论 (5)1.1 课题背景及目的 (5)1.2 课题研究现状 (5)1.2.1 国外研究现状 (5)1.2.2 国内发展现状 (6)1.3 目的和意义 (6)1.3.1 研究目的 (6)1.3.2 研究意义 (7)第2章系统器件选择设计 (8)2.1 PLC的选型 (8)2.1.1PLC机型的选择 (8)2.1.2PLC容量的选择 (8)2.2电动机启动方式 (9)2.2.1电动机启动方式的选择 (9)2.1.2电动机电气控制电路 (10)2.2.3电动机的PLC控制程序编写 (10)2.3温度、湿度传感器的选型 (11)2.3.1温度传感器的选择 (11)2.3.2湿度传感器的选择 (13)2.4模块的选择 (15)2.4.1模块的认识 (15)2.4.2 EM235配置 (17)2.5系统所需电源的选择 (18)第3章系统的软件设计 (19)3.1常用PLC程序的设计方法 (19)3.2温度监控程序的设计 (19)3.3湿度监控程序设计 (22)结论 (26)参考文献 (27)基于PLC的自动浇灌系统设计第1章绪论1.1 课题背景及目的我国水资源短缺,利用率低,水浪费严重,供需矛盾突出。
基于PLC控制技术的农业自动灌溉系统设计摘要:水是一切生命过程中不可替代的基本要素,水资源是国民经济和社会发展的重要基础资源。
我国是世界上13个贫水国之一,人均水资源占有量2300立方米,只有世界人均水平的1/4,居世界第109位。
而且时空分布很不均匀,南多北少,东多西少;夏秋多,冬春少;占国土面积50%以上的华北、西北、东北地区的水资源量仅占全国总量的20%左右.近年来,随着人口增加、经济发展和城市化水平的提高,水资源供需矛盾日益尖锐,农业干旱缺水和水资源短缺已成为我国经济和社会发展的重要制约因素,而且加剧了生态环境的恶化。
按现状用水量统计,全国中等干旱年缺水358亿立方米,其中农业灌溉缺水300亿立方米。
20世纪90年代以来,我国农业年均受旱面积达2000万公顷以上,全国660多个城市中有一半以上发生水危机,北方河流断流的问题日益突出,缺水已从北方蔓延到南方的许多地区。
由于地表水资源不足导致地下水超采,全国区域性地下水降落漏斗面积已达8。
2万平方公里。
发达国家的农业用水比重一般为总用水量的50%左右。
目前,我国农业用水比重已从1980年的88%下降到目前的70%左右,今后还会继续下降,农业干旱缺水的局面不可逆转。
北方地区水资源开发利用程度已经很高,开源的潜力不大。
南方还有一些开发潜力,但主要集中在西南地区。
我国农业灌溉用水量大,灌溉效率低下和用水浪费的问题普遍存在。
目前全国灌溉水利用率约为43%,单方水粮食生产率只有10公斤左右,大大低于发达国家灌溉水利用率70-80%、单方水粮食生产率2。
0公斤以上的水平。
通过采用现代节水灌溉技术改造传统灌溉农业,实现适时适量的“精细灌溉",具有重要的现实意义和深远的历史意义。
在灌溉系统合理地推广自动化控制,不仅可以提高资源利用率,缓解水资源日趋紧张的矛盾,还可以增加农作物的产量,降低农产品的成本.本次设计是采用PLC控制多路不同的土壤湿度,浇灌的开启和停止完全由土壤的湿度信号控制,能使土壤的湿度值保持在作物生长所需要的最佳范围之内。
摘要水是我们维持生命活动必不可少的物质。
当今社会水资源利用不合理,造成了极大的浪费。
如我国的甘肃、陕西等地水资源匮乏,人们日常生活用水得不到保证,所以人们要更加合理利用水资源。
水资源绝大部分浪费在农田灌溉,主要是因为人们采用大水漫灌,不仅浪费了水资源,更增加了劳动量。
因此,本文设计了一种自动灌溉装置的PLC控制系统。
首先分析了自动灌溉装置的结构及工作原理,从而确定了控制要求,然后进行了硬件设计和软件设计。
其中硬件设计主要包括PLC选型、I/O分配表和I/O外部接线图,软件设计包括了控制流程图设计和梯形图程序设计。
该系统采用PLC技术为控制核心,使其体积更小、功能更强、编程更简单、可靠性更高、控制更灵活。
关键词:自动灌溉装置;PLC控制系统;硬件设计;软件设计AbstractWater is essential for us to maintain life activities. In today's society is not reasonable in the utilization of water resources, caused great waste. Such as gansu, shanxi and other places in China water resources shortage area, water not assured that people lives daily, so we need to more rational use of water. Waste most of the waste of water resources in irrigation, because people using flood irrigation, waste water not only, make more people to increased labor. Therefore, this article designed a kind of PLC control system of an equipment of automatic irrigation. First analyzed the structure and working principle of automatic irrigation device, thus determined the work requirements. Then the hardware designed and software designed. Hardware designed including the designed of the hardware principle, type selection of PLC, I/O allocation table and external I/O wiring diagram. Software designed including the designed principle and ladder diagram programming. The system uses PLC as the designed core, small volume, strong function, simple programming, high reliability and flexible assembly.Keywords:Automatic irrigation device; PLC control system; Hardware design; Software design目录1 绪论 (1)1.1 课题背景及意义 (1)1.2 国内外研究发展现状 (2)1.2.1 国外研究发展现状 (2)1.2.2 国内研究发展现状 (3)2 自动灌溉装置的控制要求 (3)2.1 结构介绍 (3)2.2 工作过程 (4)2.3 控制要求 (5)3 自动灌溉PLC控制系统的硬件设计 (5)3.1 系统硬件的设计原则 (5)3.2 PLC选型 (6)3.3 I/O分配表 (7)3.4 I/O外部接线图 (8)4 自动灌溉PLC控制系统的软件设计 (9)4.1 系统软件的设计原则 (9)4.2 控制流程图设计 (9)4.3 梯形图程序设计 (10)4.3.1 A类水生植物梯形图程序设计 (10)4.3.2 B类植物梯形图程序设计 (11)4.3.3 C类水生植物梯形图程序设计 (12)5 PLC控制系统的调试与程序的仿真 (15)5.1 PLC控制系统的安装与布线 (15)5.2 程序的仿真 (15)6 结论 (18)参考文献 (19)附录 A (20)致谢 (24)1 绪论1.1 课题背景及意义我国淡水资源短缺,利用率低,水浪费严重,供需矛盾突出。
现代化农业 2015年第3期(总第428期)
·65·
基于PLC的新型育苗播种机控制系统的设计
张向峰,王永岩,闫蕾蕾,吴 洋
(青岛科技大学,山东 青岛 266061)
摘要:针对多数传统育苗播种机缺少土壤压实功能和土壤灌溉功能以及控制系统多采用机械机构等存在的一 系列问题,
设计了具有压实和灌溉装置的新型育苗播种机,并且对控制系统进行PLC设计,给出了控制系统主流 程图以及控制系统程
序梯形图。该控制系统实现了高可靠性、低故障、机体轻量化以及高生产率等优点。
关键词:育苗播种机;控制系统;PLC;梯形图
0 引言
随着科技的发展,育苗播种机已广泛出现在花 卉
和蔬菜的育苗播种工作中。大多数育苗播种机虽 然已是
集装土、播种、覆土于一体,但缺少土壤压实 和土壤灌
溉功能,并且传统育苗播种机控制系统多 采用机械机
构,尤其多采用齿轮副,通过不完全齿 轮、槽轮机构或
者棘轮机构等实现各装置的间歇运 动。这种播种机虽然
在基本功能上满足了基本需 要,但是育苗盘土壤未经
压实和灌溉。土壤未经压 实则土壤内的水分不容易保
持;播种机未设灌溉装 置就需要对育苗盘进行后续浇
水处理,降低了生产 效率;所采用的机械机构控制,
由于机械机构易磨 损、控制系统零件多而导致装配复
杂、故障多、整机 重量大、可靠性差、更换零件频繁。
本文所提出的新型育苗播种机是在目前播种机 的
结构基础上,增加压实装置与灌溉装置,尤其是针 对
目前所采用的机械机构控制所暴露出来的一系列 问
题,提出采用功能强、故障率低、可靠性高和改变 生产
工艺只需改变程序以及少许接线的可编程控制 器(
P
LC
)来控制[1]。
1 新型育苗播种机基本结构
1.1 新型育苗播种机总体结构
本文所述新型育苗播种机主要是在目前播种机 结
构的基础上增加压实装置与灌溉装置,整机主要 由放
钵装置、填土装置、播种覆土装置、压实装置、灌
溉装置、控制装置以及输送装置等组成(参见图1)。
1.2 压实装置基本结构
压实装置主要是通过凸轮轴端电机驱动,经过 凸
轮推杆机构和连架杆驱动压杆往复运动,实现所 需要
满足的压实功能。压实装置主要包括凸轮轴、
凸轮推杆机构、连架杆以及压杆等(参见图2)。
图1 播种机总体结构示意图
1.灌溉装置 2.压实装置 3.播种覆土装置 4.填土
装置 5.放钵装置 6.育苗盘 7.输送装置 8.控制装置
图2 压实装置结构示意图
1.压杆 2.连架杆 3.推杆 4.复位重块 5.凸轮
6.凸轮轴
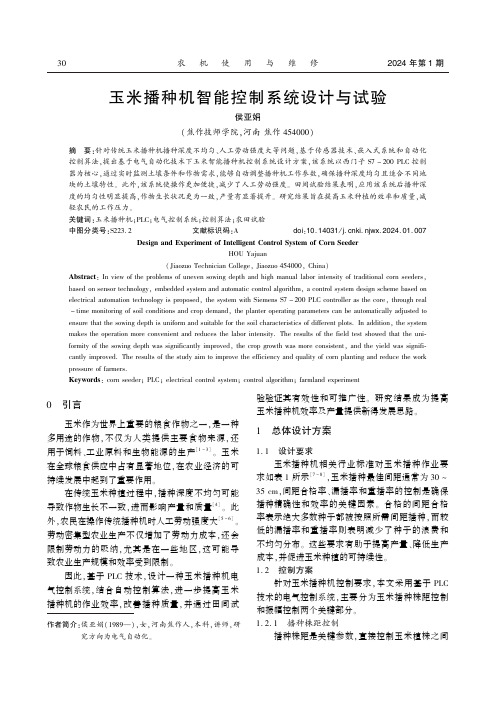
1.3 灌溉装置基本结构
收稿日期:2014-12-31 图3 灌溉装置结构示意图
·66·
现代化农业 2015年第3期(总第428期)
1.水箱 2.水龙头 3.连接软管 4.脉冲电磁阀 5.
软管
灌溉装置主要是通过脉冲电磁阀驱动水龙头的 动
作,实现间歇的灌溉功能。灌溉装置主要包括脉 冲电磁
阀、水龙头、软管以及水箱等(参见图3)。
2 新型育苗播种机控制系统 PLC设计
如图1所示,育苗播种机为流水线工作,经输送 装
置依次通过放钵装置、填土装置、播种覆土装置、 压实装
置以及灌溉装置,经各装置实现相应的功能。 传统的控
制方式多采用齿轮箱和链条副实现各部分 的间歇动作,
两链轮轴的平行度以及相配合的两链 轮位于同一平面的
精度等一系列问题严重降低了育 苗播种机的工作可靠
性。本文对新型育苗播种机控 制系统进行PLC设计,
采用PLC控制各部分的顺 序启动和间歇工作,大大提
高了工作的可靠性。
2.1 播种机 PLC控制系统硬件设计
2.1.1 PLC控制系统的总体构成
新型育苗播种机控制系统的主要硬件有 PLC
主机、按钮、接线端子、放钵装置、输送装置、填土装
置、播种覆土装置、压实装置以及灌溉装置等。系统 控
制的核心是启动信号通过PLC输入接口输入到 PL
C中,然后通过软件程序的执行,PLC发出动作 控
制信号驱动相应电磁阀电磁线圈的通断,从而实 现各
部分的功能。图4为新型育苗播种机PLC控
制系统示意图。
→
放钵装置
→
输送装置
输 → 填土装置
输入 出
播种装置
接口 主机 接 → 停车按钮
口
→ 覆土装置
→
压实装置
→
灌溉装置
图4 播种机PLC控制系统示意图
2.1.2 I/O点数的确定 a.输入点数的确定 输
入点主要是启动按钮和
停车按钮,所以输入点有2个。 b.输出点数的确定 所
需控制对象主要有输
送装置、放钵装置、填土装置、播种装置、覆土装置、 压
实装置以及灌溉装置,所以输出点主要有7个。
2.1.3 PLC的选型
PLC选型的基本原则是在满足控制要求的前 提
下,保证可靠、维护使用方便,并取得最佳的性能
价格比。该控制系统主要以开关量控制为主,并且 由
于需要间歇工作,通断较为频繁,所以可以采用晶 体
管输出方式,I/O点数占用较少,论文采用欧姆龙
CPM1A系列 PLC作为主控制器。设计中选择
PLC型号为 CPM1A-30CDT-D,其输入节点为 18
点,输出节点为12点,输出方式为晶体管输出[2]。
2.2 播种机 PLC控制系统软件设计
在PLC控制系统硬件设计完成后,需要将播种 机
控制系统PLC程序写入存储器,通过程序执行, 输出
控制信号驱动相应装置动作,实现播种机各部 分的功
能。控制系统的程序主要包括两个部分:一
个是各装置之间的启动延时程序;另一个是各装置 的
间歇工作的实现[3]。
2.2.1 控制系统工作原理
图5 各装置顺序延时启动流程示意图
图6 放钵装置间歇工作流程示意图
育苗播种的流水线作业,涉及到各装置的延时 启
动以及间歇工作,各装置的延时启动时间可以通 过调
节各装置在播种机机架上的位置进行调节。育
苗播种的作业流程是:按下启动按钮后,放钵装置开
始工作(其它装置处于延时启动状态),放钵装置工
现代化农业 2015年第3期(总第428期)
·67·
作2s将育苗盘放在输送装置上,此时放钵装置暂停
工作,输送装置启动工作,并依次将育苗盘输送到相 应
的装置下完成播种工作。各装置之间的间歇工作 时间
为:输送装置工作1.5s,停2s;放钵装置、填土
装置、覆土装置、压实装置以及灌溉装置工作2s,停
1.5s
。
各装置之间的延时启动时间依次设置为:输送 装
置延时2s启动,填土装置延时7.5s启动,播种装
置延时9s启动,覆土装置延时12s启动,压实装置
延时18s启动,灌溉装置延时21s启动。播种机控
制系统顺序启动工作流程如图5所示[4]。
各装置顺序启动后,根据所要求的功能,要实现
间歇工作。考虑到篇幅问题,本文仅以放钵装置为 例,
说明各装置的间歇工作流程(参见图6)。
2.2.2 控制系统I/O端口分配
根据新型育苗播种机控制系统的输入和输出开
关量信号进行I/O端口分配(如表1所示)。
表1 播种机控制系统I/O端口分配表
输入项目 端口编号 输出项目 端口编号
启动按钮 0.00 辅助线圈
1.00
停车按钮 0.01 放钵线圈
1.01
输送线圈
1.02
填土线圈
1.03
播种线圈
1.04
覆土线圈
1.05
压实线圈
1.06
灌溉线圈
1.07
2.2.3 控制系统梯形图
论文所设计的控制系统核心是:①顺序延时启
动;②间歇工作。各装置的顺序延时启动程序主要 通过
定时器实现,各装置的间歇工作通过2个定时 器的相
互作用实现。控制系统PLC程序梯形图如 图7所示。
图7 控制系统梯形图
3 结束语
对于育苗播种机控制系统采用PLC控制是完 全可
以实现的,基于PLC控制的新型育苗播种机, 克服了
由于机械机构控制而导致的零件磨损、更换 频繁、可靠
性差等问题,实现了整机轻量化、高可靠 性以及改变工
艺只需改变程序和少许接线,柔性化 程度提高。随着P
LC技术的不断发展,其在农业生 产领域将会得到越来
越多的应用。
4 参考文献
[1] 郭葆文,丁彦宾.基于 PLC的电梯控制系统的设计与 仿真
[J].应用能源技术,2014(8):46-47.
[2] 徐世许,朱妙其,王毓顺.可编程序控制器———原理·应
用·网络[M].2版.合肥:中国科学技术大学出版社,200
8. [3] 宋飞燕.基于 PLC的煤矿副井操车电气控制系统的设
计[J].煤矿机械,2014(9):25-26.
[4] 于秀娜,张茜铭.基于 PLC的装配流水线控制 [J].科
技创新与应用,2014(32):104.
(00
5)