无人机飞行控制系统模拟器设计
- 格式:pdf
- 大小:422.12 KB
- 文档页数:6

ISSN 1002-4956 CN11-2034/T实验技术与管理Experimental Technology and M a n a g e m e n t第38卷第3期202丨年3月Vol.38 N o.3Mar. 2021D O I:10.16791/j.c n k i.s j g.2021.03.031无人机飞行控制半实物仿真系统设计与实现吕永玺,屈晓波,史静平(西北工业大学自动化学院,陕西省飞行控制与仿真技术重点实验室,陕西西安710072 )摘要:为保证无人机飞行试验的安全性,提升无人机飞控系统设计的可靠性,自主研发了无人机飞行控制半实物仿真系统。
结合准确的无人机6自由度非线性数学模型和x P C实时系统模块模拟生成无人机飞行状态信息,根据地面站控制指令、传感器故障模注人指令解算获得不同飞行模式和飞行状态下的舵面偏转量,实现了实时系统闭环反馈控制,并驱动舵面偏转检验控制系统的响应速度。
该系统不仅能验证飞控系统的逻辑性和实时性,而且借助虚拟现实技术和航迹地图显示,具备在线整定控制律参数的功能。
该系统模块化程度高,相关硬件和软件对无人机平台和飞控计算机通用性广,依据多平台实验和多架次试飞的实验流程实用性强,为无人机飞控系统开发提供了切实可行、高效可靠的途径。
关键词:飞行控制;实时系统;虚拟现实;在线调参;故障注人中图分类号:V249文献标识码:A文章编号:1002-4956(2021)03-0153-05Design and realization of hardware-in-the-loop simulationsystem for UAV flight controlLYU Yongxi,〇U Xiaobo,SHI Jingping(S h a a n x i P r o v i n c e K e y L a b o r a t o r y o f Flight Control a n d S i m u lation T e c h n o l o g y, S c h o o l o f A u t o m a t i o n,N o r t h w e s t e r n Polytechnical University, X i'a n 710072, C h i n a)Abstract: T o e n s u r e the safety o f U A V flight test a n d i m p r o v e the reliability o f U A V flight control s y s t e m design,the U A V flight control h a r d w a r e-i n-t h e-l o o p s i m u l a t i o n s y s t e m is i n d e p e n d e n t l y d e v e l o p e d.T h e flight statei n f o r m a t i o n o f U A V is g e n e r a t e d b y c o m b i n i n g the a c c u r a t e 6-D O F n o n l i n e a r m a t h e m a t i c a l m o d e l o f U A V a n dx P C real-time s y s t e m m o d u l e. A c c o r d i n g to the g r o u n d station control c o m m a n d a n d s e n s o r fault m o d e injectionc o m m a n d, the deflection o f the control surfaces u nde r different flight m o d e s a n d flight states c a n b e obtained. T h ec l o s e d-l o o p f e ed b a c k control o f the real-time s y s t e m is realized, a n d the control surfaces are d r i v e n to test ther e s p o n s e s p e e d o f the control s y s t e m. T h e s y s t e m c a n not o n l y verify the logic a n d real-time p e r f o r m a n c e o f theflight control s y s t e m,b u t also h a s the function o f onli n e t u n i n g control l a w p a r a m e t e r s w i t h the h e l p o f virtualreality t e c h n o l o g y a n d track m a p display. T h e s y s t e m h a s a h i g h d e g r e e o f m o d u l a r i z a t i o n, a n d the related h a r d w a r ea n d s o f t w a r e are w i d e l y u s e d for the U A V p l a t f o r m a n d flight control c o m p u t e r.A c c o r d i n g to the e x p e r i m e n t a lp r o c e s s o f m a n y p l a t f o r m e x p e r i m e n t s a n d flight tests, the s y s t e m is practical, efficient a n d reliable for thed e v e l o p m e n t o f U A V flight control s y s t e m.Key words: flight control; real t i m e s y s t e m; virtual reality; o n line p a r a m e t e r a d j u s t m e n t; fault injection随着信息技术的发展和社会需求的增长,无人机 目标侦查与打击[4_5]等领域。
用C语言实现的智能无人机航行控制系统设计一、引言随着科技的不断发展,无人机作为一种新型的航空器具备了广泛的应用前景,包括军事侦察、灾害勘测、农业植保等领域。
而无人机的航行控制系统是保证其安全飞行的核心。
本文将介绍如何利用C语言设计智能无人机航行控制系统,实现对无人机的精准控制。
二、智能无人机航行控制系统设计1. 系统架构智能无人机航行控制系统主要由传感器模块、数据处理模块、执行器模块三部分组成。
传感器模块用于获取环境信息,数据处理模块对传感器获取的数据进行处理分析,执行器模块则根据处理结果控制无人机的航行。
2. 传感器模块传感器模块是智能无人机航行控制系统中至关重要的部分,常用的传感器包括陀螺仪、加速度计、气压计等。
这些传感器可以实时获取无人机的姿态、速度、高度等信息,为后续的数据处理提供基础。
3. 数据处理模块数据处理模块负责对传感器获取的数据进行滤波、融合等处理,提取出有用的信息并进行分析。
在C语言中,可以利用各种算法如卡尔曼滤波、PID控制等来实现数据处理模块的功能。
4. 执行器模块执行器模块根据数据处理模块得出的结果,控制无人机的电机、舵机等执行器,实现对无人机航行状态的调节。
通过C语言编程,可以编写相应的控制算法,实现对无人机的精准控制。
三、C语言在智能无人机航行控制系统中的应用1. 高效性能C语言作为一种高效的编程语言,在嵌入式系统中有着广泛的应用。
其快速的运行速度和对硬件的直接操作使得C语言成为设计智能无人机航行控制系统的理想选择。
2. 灵活性C语言具有较高的灵活性,程序员可以根据具体需求编写各种算法和函数,实现对无人机航行状态的精准控制。
同时,C语言也支持指针操作等底层操作,方便与硬件进行交互。
3. 可移植性由于C语言是一种通用性较强的编程语言,编写好的代码可以在不同平台上进行移植和调试。
这意味着设计好的智能无人机航行控制系统可以适用于不同型号和品牌的无人机上。
四、总结通过本文对用C语言实现的智能无人机航行控制系统设计进行介绍,我们了解到了智能无人机航行控制系统的架构和各个模块的功能。
无人机飞行控制系统的设计与实现随着科技的不断进步,无人机在各个领域得到了广泛的应用,如军事侦察、航拍摄影、环境监测等。
而无人机的飞行控制系统是其核心技术之一,决定着无人机的飞行性能和稳定性。
本文将重点探讨无人机飞行控制系统的设计与实现。
一、无人机飞行控制系统的概述无人机飞行控制系统是指通过计算机软件和硬件设备对无人机进行飞行模式的控制与调节。
它主要由感知、计算、控制和执行四个部分组成。
感知部分负责采集无人机周围环境信息,计算部分负责根据信息进行数据处理和飞行参数计算,控制部分负责控制无人机的姿态和速度,执行部分负责完成对无人机飞行指令的执行。
这四个部分相互协作,共同实现了无人机的飞行控制。
二、无人机飞行控制系统的主要模块1. 传感器模块传感器模块是无人机飞行控制系统的感知部分,包括陀螺仪、加速度计、罗盘等传感器。
陀螺仪用于测量无人机的角速度,加速度计用于测量无人机的加速度,罗盘用于测量无人机的指向。
通过这些传感器的数据采集,无人机可以获取周围环境的信息。
2. 数据处理模块数据处理模块是无人机飞行控制系统的计算部分,负责对传感器采集的数据进行处理和计算。
这个模块通常由嵌入式处理器实现,可以使用滤波算法、运动学模型等对数据进行滤波、分析和计算,得到无人机的飞行参数。
3. 控制算法模块控制算法模块是无人机飞行控制系统的控制部分,根据无人机当前的飞行参数和目标飞行状态,通过控制算法生成控制信号,控制无人机的姿态和速度。
常用的控制算法有PID控制、模糊控制、自适应控制等。
4. 执行器模块执行器模块是无人机飞行控制系统的执行部分,包括电调、电机等设备。
通过控制信号,执行器模块可以调节电调和驱动电机,实现对无人机动力系统的控制。
三、无人机飞行控制系统的实现无人机飞行控制系统的实现主要包括硬件和软件两个方面。
在硬件方面,需要选购合适的传感器和执行器,保证其性能稳定可靠。
传感器的选购需要考虑其采样频率、精度等因素,执行器的选购需要考虑其功率和转速等因素。
无人地效飞行器控制系统设计陈利【摘要】地面效应飞行器(以下简称地效飞行器)是飞行在近地(水)面的特殊飞行器,由于其飞行高度离水面或地面十分的接近,且飞行速度较快,对操纵人员反应速度要求较高,操作难度大,设计一套无人控制系统便显得尤为必要。
从硬件设计和软件设计2个方面介绍了该系统的设计,以供参考。
该型控制系统已应用于实际项目中。
%WIG is a kind of special craft which flies at high speed near the ground ( water) surface. Due to its high speed and difficult operation, its operator must satisfy the high requirements. This paper desigs a control system suitable for the craft, and then, analy-ses and introduces the overal design scheme from the hardware and software design, to give a reference to you. This control system is applied to the actual project.【期刊名称】《机械制造与自动化》【年(卷),期】2016(000)004【总页数】2页(P183-183,188)【关键词】地面效应;无人飞行器;控制系统【作者】陈利【作者单位】南京航空航天大学自动化学院,江苏南京200016【正文语种】中文【中图分类】V279无人飞行控制系统对于飞行器来说就是像无形的驾驶员。
该控制系统主要包含机载飞控计算机及传感器、地面遥控遥测站和无线传输设备,系统的运行正常与否直接影响任务能否顺利完成。
无人地效飞行器由机载飞控计算机控制,它是控制系统的核心。
无人机系统仿真设计解决方案一想起无人机系统仿真设计,我脑海中立刻浮现出那复杂而又精妙的世界。
无人机,这个曾经只存在于科幻小说中的产物,如今已经渗透到了我们生活的方方面面。
那么,如何设计一套完善的无人机系统仿真解决方案呢?下面,我就用我十年的方案写作经验,为大家详细解答。
我们得明确无人机系统仿真的目标。
无人机系统仿真不仅仅是模拟无人机的飞行,还包括了无人机的控制、导航、通信、任务规划等多个方面。
所以,在设计解决方案时,我们要全面考虑这些因素。
1.仿真平台的选择在选择仿真平台时,我们要考虑到无人机的种类和仿真任务的需求。
目前市面上主流的仿真平台有MATLAB/Simulink、ANSYS、X-Plane 等。
MATLAB/Simulink适合进行算法研究和系统级仿真,ANSYS则擅长于结构分析和动力学仿真,而X-Plane则更侧重于飞行性能的仿真。
2.仿真模型的建立我们要建立无人机的仿真模型。
这个模型应该包括无人机的动力学模型、控制模型、导航模型、通信模型等。
在建立模型时,我们要尽量简化,抓住主要因素,忽略次要因素。
比如,在动力学模型中,我们可以忽略无人机的弹性变形,将其视为刚体。
3.仿真参数的设置在仿真参数设置方面,我们要根据无人机的实际参数来设置。
这些参数包括无人机的质量、惯性矩、翼载、推力等。
还要设置环境参数,如风速、温度、湿度等。
这些参数的设置将直接影响到仿真结果的准确性。
4.仿真流程的设计(1)初始化:设置仿真起始时间、仿真步长等。
(2)输入:设置无人机的初始状态、控制指令等。
(3)仿真:根据动力学模型、控制模型等,计算无人机的状态变化。
(4)输出:记录无人机的状态数据,用于后续分析。
(5)终止:判断仿真是否达到预设的终止条件。
5.仿真结果的分析仿真结束后,我们要对仿真结果进行分析。
这包括无人机的飞行轨迹、稳定性、控制性能等方面。
通过分析仿真结果,我们可以发现无人机系统存在的问题,并进行优化。
技术方案Technology Scheme数据通信2020.616基于PID控制的多用途无人机模拟器的设计白金凤金正焕金湜(韩国世明大学信息通信学院世明大学27136)摘要:目前的无人机模拟器是在无人机重量确定的情况下设计的,很容易地检验其飞行稳定性或控制功能。
但是无人机主要分为两种类型:重量固定型和重量可变型。
重量固定型无人机在飞行期间重量固定,例如竞赛用无人机或无人机上搭载重量固定的摄像头。
重量可变型无人机在飞行期间尽管机身重量固定,但是无人机上搭载的重量是变化的,例如用于喷洒农药的无人机。
本文设计了基于PID控制的多用途无人机模拟器,既可以对重量固定型无人机进行设定,也可以对重量可变型无人机进行设定。
首先在Simulink平台上建立模型,通过改变无人机的重量进行实验,然后在Cleanflight平台上进行实验,并与重量固定型无人机进行了比较。
实验结果表明,重量可变型无人机在飞行的稳定性和控制方面均达到了最优状态。
关键词:多用途无人机;模拟器;Simulink0引言无人机是随着通信技术的发展而发展起来的。
无人机灵活性高,应用于侦察、跟踪和定位等[1]。
目前设定无人机的代表性模拟软件是Cleanflight和Betaflight,可以对重量固定的无人机进行优化,但是当用途改变时,需更换电子调速器和电机,然后再根据配件重新设定。
对于重量可变型无人机却不可设定[2]。
农业用无人机在农药喷洒前、中、后过程中的重量一直变化,设置非常复杂。
因此,本论文设计了基于PID控制的多用途无人机模拟器,通过动力学方程及无人机重量分析电机的最佳性能,既可以对重量固定型无人机进行设定,也可以对重量可变型无人机进行设定。
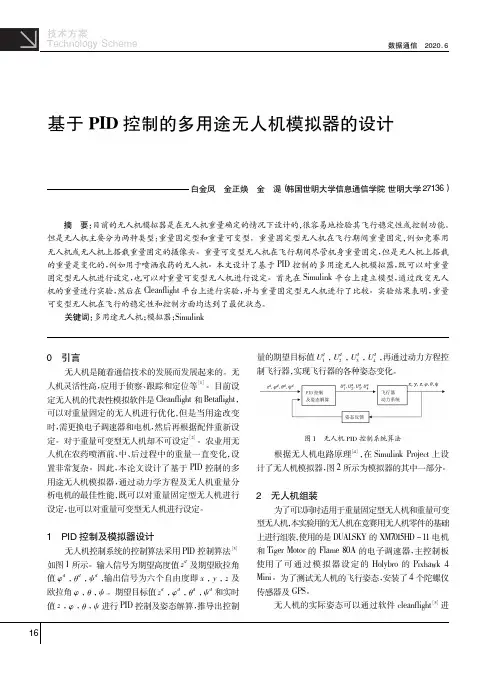
1PID控制及模拟器设计无人机控制系统的控制算法采用PID控制算法[3]如图1所示。
输入信号为期望高度值z d及期望欧拉角值φd,θd,ψd,输出信号为六个自由度即x,y,z及欧拉角φ,θ,ψ。
期望目标值z d,φd,θd,ψd和实时值z,φ,θ,ψ进行PID控制及姿态解算,推导出控制量的期望目标值U d1,U d2,U d3,U d4,再通过动力方程控制飞行器,实现飞行器的各种姿态变化。
基于STM32的四旋翼飞行器控制系统设计引言:四旋翼无人机近年来逐渐走向商业化和日常生活化,广泛应用于航拍、货运、农业等领域。
为了保证飞行器的平稳、安全飞行,需要设计一个可靠的控制系统。
本文基于STM32单片机,设计了一种适用于四旋翼飞行器的控制系统。
一、硬件设计1.主控板主控板采用STM32单片机,该单片机具有高性能、低功耗、强大的控制能力等优势。
它能够完成飞行器的数据处理、控制输出等任务。
2.传感器为了获取飞行器的姿态信息,需要使用加速度传感器和陀螺仪。
加速度传感器用于测量飞行器的加速度,陀螺仪用于测量飞行器的角速度。
这些传感器通常被集成在一块模块上,直接连接到主控板。
3.遥控器为了实现飞行器的遥控操作,需要使用遥控器。
遥控器通过无线通信与主控板进行数据传输,控制飞行器的起降、悬停、转向等操作。
4.电源管理飞行器控制系统需要提供可靠的电源供电。
因此,需要设计一个电源管理模块,包括锂电池、电池充电管理电路和电源开关等。
二、软件设计1.姿态估计通过加速度计和陀螺仪的数据,使用滤波算法(如卡尔曼滤波)对飞行器的姿态进行估计。
根据姿态的估计结果,可以计算出飞行器的控制输出。
2.控制算法针对四旋翼飞行器,常用的控制算法有PID控制算法和模糊控制算法。
PID控制算法通过比较飞行器的期望姿态和实际姿态,计算出相应的控制输出。
模糊控制算法可以根据模糊规则和模糊集合来计算出控制输出。
3.通信模块为了实现与遥控器之间的无线通信,需要使用无线通信模块,例如蓝牙模块或者无线射频模块。
通过与遥控器进行数据传输,可以实现遥控操作,并接收遥控器发送的命令。
三、控制流程1.初始化飞行器启动时,首先进行传感器的初始化,包括加速度传感器和陀螺仪的初始化。
然后进行电源管理的初始化,确保电源供电正常。
2.传感器数据采集通过传感器采集飞行器的姿态数据,包括加速度和角速度。
3.姿态估计根据传感器采集的数据,使用滤波算法对飞行器的姿态进行估计。
模拟飞行无人机教学设计在当今无人机技术日益发展的背景下,模拟飞行无人机教学设计成为了许多学校和机构重要的教学内容。
通过模拟飞行无人机教学设计,学生可以在虚拟环境中进行机载设备控制、飞行器操作和实际情况模拟,从而提高其对飞行无人机技术的理解和应用能力。
一、教学目标1. 了解飞行无人机的基本原理和技术;2. 掌握飞行无人机的操作方法和飞行技巧;3. 理解飞行无人机的应用领域和相关政策法规;4. 提高学生在无人机相关工作和研究中的实践能力。
二、教学内容1. 飞行无人机的基本知识通过模拟飞行无人机教学设计,学生将学习无人机的基本结构、工作原理和飞行原理,在虚拟环境中对飞行无人机进行分析和解剖,深入了解无人机的技术特点和发展趋势。
2. 飞行无人机的操作训练在模拟飞行无人机教学设计中,学生将进行飞行无人机的操作训练,包括遥控器操作、飞行路径规划、机载设备操作等。
学生可以在虚拟环境中模拟各种空中作业场景,如飞行、拍摄、搜救等,通过操作训练提高他们的技术熟练度和应对突发情况的能力。
3. 飞行无人机的应用案例研究通过模拟飞行无人机教学设计,学生将了解各种不同领域中飞行无人机的应用案例,如农业植保、资源勘测、环境监测等。
学生将分析这些应用案例的需求和技术特点,了解无人机在实际应用中的价值和潜力,培养学生的创新思维和跨学科能力。
4. 飞行无人机的政策法规学习无人机飞行相关的政策法规是学生进行操作和应用无人机的基础,通过模拟飞行无人机教学设计,学生将了解无人机的法律法规、飞行限制区域和安全管理要求等内容,掌握合法、安全地操作无人机的基本要求。
三、教学方法1. 模拟实验模拟飞行无人机教学设计可以通过虚拟现实技术和无人机模拟器等工具进行模拟实验。
学生可以在虚拟环境中进行各种飞行操作和应用场景的模拟,提供真实的飞行体验,降低实际操作风险,保护环境和人身安全。
2. 实践训练模拟飞行无人机教学设计应结合实际训练环境进行实践训练,在开放的场地中使用真实的飞行无人机设备进行操作。

无人机飞行控制系统设计第一章:引言无人机越来越被广泛应用于航拍、矿区勘查、农业喷洒、灾害救援等方面,随着应用范围和需求的不断扩大,对无人机飞行控制系统的性能和精度也有了更高的要求。
无人机飞行控制系统设计的一个核心问题是掌控飞行驾驶思路,让无人机如同飞机一样,能够起飞、复位、巡航、避险、着陆等。
在设计过程中,需要考虑飞机的物理规律、飞行环境、能源供给等多方面的因素。
第二章:无人机飞行控制系统结构分析无人机飞行主要由飞行控制电子板、ATmega328微控制器、直流无刷电机、电池、无人机结构组成,它们协同配合完成飞机的飞行操作。
飞行控制电子板一般由飞行控制面板、机械调节颗粒、陀螺仪和加速度计等组成,这些元器件通过高速的通讯系统实现各个部件之间的协调工作。
在无人机的控制设计过程中,需要对各个结构模块的性质和功能进行详细分析,从而对系统的设计进行优化、完善。
第三章:无人机飞行控制系统设计思路飞行控制系统的设计,需要首先确定飞机的基本架构和构造,同时合理选择电子元件及其附加的软件环境。
其次,在设计时要考虑到多方面的环境因素,例如飞机的气压、温度、重量、形状等因素。
最后,还要对整个系统进行系统化的整合和优化调整,让整个系统更为完善并最终保持稳定的工作状态。
第四章:无人机飞行控制系统关键技术1.自主控制技术:利用无人机自行识别并避免危险障碍、自主规避和自动调整飞行参数等自主控制手段;2.自适应控制技术:对非线性和时变因素进行动态弥补,使系统性能在各种复杂环境下保持稳定、高效;3.多传感器融合技术:通过多传感器协同配合,从几个方面对无人机进行监测和控制,形成更为广阔的就算视野和全方位的信息分析;4.全局导航定位技术:通过采集无人机周围的各种信息,对其定位、导航和跟踪整个飞行轨迹,并做出相应的调整等。
第五章:无人机飞行控制系统研发现状与趋势当前的无人机飞行控制系统正在不断发展中,无人机业务也在不断推广和升级,同时还面临不少的挑战。
基于深度强化学习的无人机飞行控制系统设计与优化随着无人机技术的不断发展和普及,越来越多的应用场景涌现出来。
在农业、环保、物流、安全等领域,无人机已经成为一种不可替代的工具。
但是,无人机的飞行控制系统设计和优化一直是一个重要的研究方向。
基于深度强化学习的无人机飞行控制系统正是一种有效的解决方案。
1. 强化学习在无人机飞行控制中的应用强化学习是一种机器学习方法,通过智能体与环境的交互来学习最优策略。
在无人机飞行控制中,强化学习可以通过智能体与环境的交互,学习无人机飞行控制的最优策略。
具体来说,在无人机飞行控制中,强化学习可以应用在以下几个方面:(1)路径规划:利用强化学习可以实现无人机路径规划的自动化,从而提高无人机的飞行效率和精度。
(2)姿态控制:强化学习可以实现无人机姿态控制的自动化,从而提高无人机的飞行稳定性和可靠性。
(3)动力控制:强化学习可以实现无人机动力控制的自动化,从而提高无人机的飞行效率和能耗效率。
2. 基于深度强化学习的无人机飞行控制系统设计在基于深度强化学习的无人机飞行控制系统设计中,需要考虑以下几个方面:(1)状态表示:状态表示是指如何将无人机的状态信息转化为可输入到深度神经网络中的形式。
常见的状态表示方法包括传统的向量表示和图像表示。
(2)深度神经网络设计:深度神经网络设计是指如何设计能够对无人机状态进行分析和决策的神经网络模型。
常见的神经网络模型包括卷积神经网络、循环神经网络和深度强化学习等。
(3)奖励设计:奖励设计是指如何设置奖励函数,以指导智能体学习最优策略。
在无人机飞行控制中,奖励函数可以设置为无人机飞行速度、稳定性、消耗能量等指标的组合。
(4)学习算法:学习算法是指如何使用强化学习算法,实现无人机飞行控制的自动化。
常用的学习算法包括Q-learning、Deep Q-Network(DQN)等。
3. 基于深度强化学习的无人机飞行控制系统优化在基于深度强化学习的无人机飞行控制系统优化中,需要考虑以下几个方面:(1)样本利用:样本利用是指如何充分利用已有的经验数据,在不影响模型学习效果的前提下,提高系统的飞行效率和准确性。
利用CAD进行无人机建模和飞行仿真设计无人机作为一种重要的现代飞行器,具有广泛的应用前景。
在无人机的研发和设计过程中,利用CAD(Computer-Aided Design)软件进行建模和仿真设计是不可或缺的环节。
本文将介绍利用CAD软件进行无人机建模和飞行仿真设计的一般步骤和技巧。
首先,需要选择合适的CAD软件。
市面上有多种CAD软件可供选择,如SolidWorks、AutoCAD、CATIA等。
根据个人需求和熟练程度,选择合适的CAD软件进行设计。
在本文中,我们将以SolidWorks为例进行说明。
第一步是进行无人机的建模设计。
在SolidWorks中,可以利用各种基本几何体进行建模,如圆柱体、球体、盒子等。
首先,根据无人机的整体形状和结构进行初步的几何体建模。
然后,通过添加细节和部件来完善无人机的外观和功能。
其次,需要进行无人机的装配设计。
在SolidWorks中,可以利用装配功能来组装无人机的各个部件。
通过定义关系、连接和约束等操作,使得各个部件能够正确地组装在一起。
装配设计是无人机建模的重要一环,要确保各个部件的精确对位和运动连贯性。
完成无人机的建模和装配设计后,可以进行飞行仿真设计。
利用CAD软件中的仿真功能,可以模拟无人机在不同环境和条件下的飞行性能。
可以进行气动力分析、结构强度分析、稳定性分析等。
通过仿真设计,可以评估无人机在实际飞行中的性能和稳定性,优化设计方案。
除了以上的基本步骤,下面还分享一些使用CAD软件进行无人机设计的技巧:1. 利用CAD软件的参数化设计功能,将设计参数化,方便后续的调整和修改。
2. 利用CAD软件的辅助工具和插件,如自动添加螺旋桨、创建驱动系统等,提高设计效率和准确性。
3. 在进行飞行仿真设计时,可以设置多种不同的飞行情况和工况,进行全面的性能评估。
4. 注意设计的可制造性和可装配性,考虑到生产和实际使用的因素。
5. 充分利用CAD软件的可视化功能,进行模型渲染和动画演示,展示设计成果和效果。
第5卷第5期智 能 系 统 学 报 V o.l 5 .52010年10月 C AA I T ransactions on Inte lligent Syste m s O ct .2010do:i 10.3969/.j issn .1673 4785.2010.05.003无人机编队飞行的分布式控制策略与控制器设计朱杰斌,秦世引(北京航空航天大学自动化科学与电气工程学院,北京100191)摘 要:针对一种小型无人机模型及其编队飞行的实际背景和限制条件,分析了编队飞行所必须涉及的队形保持、约束条件以及行为协调等关键性问题,进而引入分布式编队飞行控制策略并简要介绍了其优越性.根据分布式策略的层级概念,先后讨论了单机控制器的设计与上层的编队控制器的设计.最后分别进行了单机的FDC(fligh t dyna m i c and contro l )仿真和双机编队仿真.仿真结果表明,设计的控制器在执行效率和控制性能等方面具有突出的优势.关键词:无人机;分布式控制;飞行控制;编队飞行中图分类号:TP273.1 文献标识码:A 文章编号:1673 4785(2010)05 0392 08Distri bute d contr ol strategy and controller desi gn for UAV for mati on flightZ HU Jie b in ,Q I N Sh i y in(Schoo l of A uto m a tion Sc i ence and E lectr ica l Eng i neer i ng,B eihang U n i versity ,Be iji ng 100191,Ch i na)Abst ract :In v ie w of the practica l backg r ound and constra i n ts of for m ati o n fli g ht for a c lass o f s m a llUAV m ode ls ,so m e key pr oble m s i n vo l v ed i n for m ati o n fli g h,t such asm ai n taining for m ation ,env ironm enta l constraints ,and be hav ior coor d i n ation w ere analyzed in depth i n order to intr oduce the distri b uted contro l strategy for for m ation flight and d iscuss its advantages .Accord i n g to the h i e rarc h ica l concepts and organ izati o na l structure of d istri b uted con tro ls ,the contro ller desi g n for both sing le UAV and m ulti UAV for m ati o ns w ere st u died ,respective l y .There fore ,t h e FDC (flight dyna m ics and control)si m ulation for si n g l e UAV and genera lS i m ulink si m u lation f o r t w o UAV for m ati o n fli g h ts w ere carried out separately .The si m u lation resu lts show that the pr oposed con tro ll e rs prov ide so m e outstandi n g advantages in executive effic iency and con tro l perfor m ance .K eywords :unm anned aeria l veh i c le ;distributed con tro;l flight contro;l for m ati o n fli g ht 收稿日期:2010 07 26.基金项目:国防基础研究基金资助项目(D212006001);国家自然科学基金重点资助项目(60736025);国家自然科学基金资助项目(60875072).通信作者:朱杰斌.E m ai:l z j bbu aa @.无人机技术经过几十年的发展已经相对成熟,在军事和民用领域发挥着独特的作用.而无人机编队飞行技术作为无人机合作化发展中的一个核心概念,越来越得到人们的重视[1].在军事侦察中,无人机编队飞行可以扩大侦察视野,提高作战命中率和任务成功率,具有单机飞行无法比拟的优点.无人机要实现编队飞行,包括基于主 僚机编队模式的队形保持和队形变化,就必须实现对各个微小型飞行器的空间位置和姿态进行有效的控制[1].文献[2]提出了基于飞机的飞行自驾仪的编队飞行控制器设计,其中假定了飞机的自驾仪方程为一阶惯性环节,然后在此基础上进行长机和僚机的编队控制器设计.当面向实际的编队控制对象时,必须首先完成对文中所提到的自驾仪的设计.文献[3]中利用了FDC (flight dyna m ic and contro l)工具箱进行了编队控制器的设计与非线性仿真,为最终走向双机编队的试飞提供了重要的参考.在实际应用中,主 僚机编队模式由于简便性和实用性而被广泛采用.事实上,基于这种模式已经设计出了多种形式的编队控制器,并给出了仿真验证结果[4 5].但是,在上述这些方法和试验中,大部分只是单独讨论编队控制器,并没有将编队控制器的设计与编队控制的约束与控制策略,单机自主控制器设计过程结合起来,缺乏一定的系统性、实用性.本文从无人机编队飞行的特点入手,讨论了编队飞行的编队方式和约束条件,并从分布式控制策略出发,研究了处于底层的单机控制器和处于上层的编队控制器的设计、以及二者之间的接口关系.仿真试验结果验证了本文所设计的控制器的可行性与有效性.1 问题的提法1.1 编队方式与约束条件无人机编队飞行,就是将多架无人机按照一定的队形进行排列,并使其在整个飞行过程中保持队形不变.按照不同的队形,主要有雁形编队、平行编队、纵列编队、蛇形编队、球形编队等.不同的编队队形有不同的优缺点,如雁形编队僚机可以有效利用长机的气流影响,减少阻力,提高巡航时间.而按照不同的控制策略,编队方式又分为集中式、分布式、分散式等[1].无人机编队的任务往往是大规模的机群编队,在完成编队任务的过程中,很可能因为一些干扰因素引起扰动.防止冲突的策略就是要避免在扰动下可能发生的碰撞和信息交互中的阻塞.多架无人机要保持一定的阵型,就需要更充分的信息交互.在密集编队下由于无人机会受到长机上洗气流的干扰,造成了僚机的阻力有较大的变化[6].按照空气动力学估算受上洗气流影响后的僚机阻力为D FF!D∀-L∀WV.式中:D FF为僚机受到的阻力,D∀为长机的阻力,L∀为长机的升力,W为上洗气流的速度,V为编队飞行的前向速度.可见,相对长机而言,僚机所受阻力减小了,这将会迫使其偏离原定的飞行航迹.因此,编队控制器的设计必须考虑在涡流影响条件下的紧密编队模型.1.2 队形保持与行为协调无人机编队在执行任务的过程中,由长机的感知传感器实时监控战场环境与态势,并将感知信息传给智能决策模块,由智能决策模块根据感知信息进行分析、整理与推理,确定是否需要进行队形的变更,若需要改变队形,则将处理后的感知信息传给队形控制模块,由队形控制模块根据当前环境和态势产生新的编队队形信息,通过长机的通信系统传给2架僚机的通讯系统,再由僚机的编队控制模块根据新的编队信息形成新的队形.另一方面,由于战场环境和态势的动态变化,长机可以根据当前形势变更自身的预定航迹.首先由长机的感知模块检测到当前环境中的动态事件或突发威胁,将感知信息传递给智能决策模块,通过智能决策模块的分析与推理,确定是否需要进行航迹的变更.若需要变更航迹,则将处理后的感知信息传给航迹规划模块,由航迹规划模块给出新的航迹并控制长机跟踪当前航迹,由于僚机始终保持与长机的编队跟踪,因此僚机自然地跟随长机沿着变更后的航迹飞行.2 分布式控制策略及其优越性要实现多架无人机的协同编队需要在传统的两机编队的基础上,采取分布式控制策略:按照层级的概念把大规模的无人机编队分割成若干个两机编队,每个单元编队之间又是紧密联系的,最终实现多机的编队[7].其编队组态关系如图1所示.图1 分布式控制编队组态关系F ig.1 Fo r m ati on con figuration o f d istri buted controls在图1中,V1为长机,V2和V4跟随V1飞行并保持与V1的相对位置不变,从而实现其与V1之间的稳定编队;V3则可在V2的引领下根据要求的相对位置飞行,同理,V5也在V4的引领下根据要求的编队位置飞行,从而使整体编队保持稳定.整个队列可由若干个基本的两机跟随飞行编队组成,具有良好的扩充性.在分布式控制策略中,每一架无人机需知道与之相邻无人机的信息,虽然控制效果相对较差,但信息交互较少,大大减少了计算量,系统实现效率高.如果用集中式控制策略完成编队,信息交互将是海量的,这是因为处理这些信息的复杂程度与编队无人机的数量成几何关系.而如果采用分散式控制策略只要保持自己与约定点的相对关系,不和其他无人机发生交互,因此其控制效果最差[1].3 飞行动态模型和扰动分析本文中采用的小型实验无人机对象的实物如图2所示.与其相关的各动态变量和物理参量的符号表示由表1给出.#393#第5期 朱杰斌,等:无人机编队飞行的分布式控制策略与控制器设计图2 小型无人机实物照F i g.2 P rofile of the s m a llU AV表1 符号说明Tab l e1 Instruct i on of sign s参数名称符号参数名称符号无人机速度V滚转角速度p无人机质量m俯仰角速度q发动机推力T偏航角速度r飞行阻力D滚转力矩M x飞行升力L俯仰力矩Mz 侧力Z偏航力矩M y迎角 X轴转动惯量Ix 侧滑角 Y轴转动惯量I y俯仰角Z轴转动惯量Iz 偏航角!X轴距离X d滚转角∀Y轴距离Yd 航迹角#Z轴距离Z d航迹偏转角!s翼展b速度滚转角∀s机翼面积S升降舵∃e动压 q副翼舵∃a平均气动弦长 c 发动机安装角∀T根据经典飞行控制理论,可建立小型无人机的12阶微分方程模型,其中包括动力学模型和运动学模型.m d Vd t=T cos( +%T)cos -D-mg si n,m V d#d t=T[co s( +%T)sin si n∀S+sin( +∀T)co s∀s]+L co s∀S-Z sin∀S-m g cos#,-m V cos#d&sd t=T[-cos( +%T)sin cos∀s+sin( +%T)sin∀s]+L sin∀s+Z co s∀s,d x d d t =V cos#cos!s, d y dd t=V sin#,d z dd t=-V cos#sin!s,I x d pd t=M x-(I z-I y)q#r,I y d rd t=M y-(I x-I z)p#q,I x d qd t=M z-(I y-I x)p#r,d!d t=1cos(r cos∀-q si n∀),dd t=r si n∀+q cos∀,d∀d t=p-tan(r cos∀-q si n∀).在小扰动的假设条件下,一般情况就能将飞行器的运动方程进行线性化.但是为了便于将线性扰动方程组分离为彼此独立的2组,即纵向和横侧小扰动方程,以减少方程组阶次而解析求解,还需作下列假设:1)飞行器具有对称平面(气动外形和质量分布均匀对称),且略去机体内部的转动部件的陀螺力矩效应.2)在基准运动中,对称平面处于铅垂位置,并且运动所在平面与飞行器对称平面相重合[8].利用水平无侧滑飞行条件∀= ∃0和p=r∃0,将飞机运动方程解耦为不依赖于横侧向状态量( ,∀,p,r,!)的纵向运动方程:mV=T cos -D-m g sin#,m V#=T si n +L-mg cos#,=q- #,I zq=M z.式中:T、D、L及M z分别为发动机推力、气流阻力、升力及绕俯仰轴力矩,这些参量需要根据飞机当前的飞行状态来确定,在此以飞机某一平衡状态为基准,在小扰动情况下,假设这些力和力矩为相应量的线性关系.若将无人机的定常直线无侧滑飞行作为基准运动,在小扰动假设下就可得到无人机的纵向近似模型为mV=(T0+Tv∋v+T∃e∃e)cos -(D0+Dv∋v+D∋ +D∃e∃e)-mg si n#,m V#=T sin +(L0+Lv∋v+L∋ +L∋+Lq∋q+D∃e∃e)-m g co s#,=q- #,I zq=M z0++M zv∋v+M z∋ +M z∋+M zq∋q+M z∃e∃e.同理亦可通过小扰动理论得到横侧向的近似模型:m V=(Z o+Z∋ +Zp∋p+Zr∋r+#394#智 能 系 统 学 报 第5卷Z ∃a ∃a + Z ∃e∃e )-m V (-p sin +r cos ), ∀=p -(r cos ∀-q sin ∀)tan ,!=r co s ∀-q sin ∀cos,I x p =M x 0+M x ∋ + M x p ∋p + M xr ∋r + M x ∃ ∃a + M x∃e∃e ,I y r =M y 0+ M y ∋ + M y p ∋p + M yr ∋r + M y ∃a ∃a + M y∃e∃e . 将无人机的固有参数和通过吹风试验得到的飞行参数,以及通过系统辨识方法得到的发动机参数代入到其中可以得到纵向与横向的状态方程.4 控制器设计实现纵向与横航向的解耦建模之后,单机控制器的设计亦可分为纵向控制器和横侧向控制器分别进行.必须注意到,本文所设计的单机控制器是服务于其上层的导航与编队系统,从而使得编队飞行过程能够按照导航系统或编队控制器所要求飞行参量(速度、高度及偏航信号等)实现稳定、快速、准确的控制效果[9].4.1 单机纵向控制器的设计根据编队试飞的要求,纵向自驾仪的设计主要包括高度控制器(控制高度)和速度控制系统.首先确定飞机的平飞状态,并代入到上面介绍的小扰动方程中,整理得到纵向的状态方程:X =A lon X +B lon u ,Y =C lon X +D lon u.式中:X =[V q H ]T,V 为前向速度, 为迎角,q 为俯仰角速度, 为俯仰角,H 为高度,u =[∃e ∃T ]T.∃e 、∃T 分别为升降舵与油门舵机输入.在本文中,将平飞速度与高度确定后,其对应的状态矩阵和控制矩阵分别为A lon =-0.06415.25790-9.8000-0.000-0.0309-5.04971.00000-0.0012-0.0287-26.2897-4.17580-0.0000001.0000000-1515,B lon =274.95020.4336-1.6634-34.86500000,C lon =I 5,D lon =05%2.1)俯仰保持控制器设计.该控制器内环是俯仰角速率反馈回路.该回路通过增加短周期模态的阻尼来增加其纵向的稳定性.其反馈系数可以通过根轨迹法来确定.外环是俯仰角反馈回路,在该回路的前向通道,仅仅是比例式控制器往往是有稳态误差的,需要在前向通道加入积分式控制器.本文使用Tyreus Luyben 方法设计该回路中的PI 控制器[10].其俯仰保持的控制律表示形式为∃e =Kp ( g - )+KI &( g -)d t-k q q .(1)式中:Kp 为前向通道的比例系数,KI 为前向通道的积分系数,k q 为俯仰角反馈系数, g 为期望俯仰角(控制律的表达式中系数的书写规则:K 为前向通道系数,下标p 表示比例系数,下标I 表示积分系数;上标则表示对应于相应的回路,如式(1)中上标 表示俯仰角回路;k 为反馈系数,下标表示对应的反馈回路).2)高度保持控制器的设计.高度保持控制器的是在俯仰保持控制器的外环.通过高度保持控制器的控制,UAV 可以爬升到飞行包线范围内任意高度.在编队控制系统中,该控制器直接接受导航系统或者是僚机编队控制系统的信号.引入俯仰角偏离信号,飞机在未达到给定高度时,就提前收回舵面,减少飞机的上升率,对高度稳定系统起到阻尼作用,为进一步增加阻尼,同时还引入了高度微分信号∋ H [11].图3 高度保持控制器组织结构F ig .3 O rganiza ti on structure o f he i ght contro ller#395#第5期 朱杰斌,等:无人机编队飞行的分布式控制策略与控制器设计高度保持控制系统的控制律表达形式为∃e =Kp ( c - )+Ki &( c -)d t -k q q, c =K Hp∋H +K HI&∋H d t .式中:∋H =H g -H -k H H 为高度偏差信号.3)速度保持控制器的设计.通过控制油门的大小来达到改变发动机推力从而达到控制的目的.其基本方案如图4所示.从图中可以看到,UAV 到自动控制驾驶仪为虚线连接,这表示自动驾驶仪从UAV 感受的量是随着目标的不同而变化的,当需要飞机进行俯仰保持时,则感受的是俯仰角和俯仰角速率,若需要UAV 保持高度飞行时则自驾仪感受的是飞机的高度和高度变化率.图4 速度控制器的组织结构F i g.4 O rganiza ti on structure o f veloc it y contro ller速度误差信号包括2部分,一部分是期望速度与实际速度输出的差值,另一部分是速度微分信号.其控制律的表达形式为∃T =K Vp (∋V +Kv V)+K VI (∋V +K v V)d t .式中:∋V =V g -V .4.2 单机横航向控制器的设计在横向与航向控制器的设计中,采用与纵向控制器类似的结构.内环是滚转保持控制器,外环为横航向保持的控制器.因此其基本设计思路与高度控制器类似.1)滚转保持控制器.该回路通过控制副翼偏转,产生升力差,从而产生滚转力矩.其控制律表达形式为∃a =K ∀p∋∀+K∀I&∋d t .式中:∋∀=∀g -∀-k p p.2)偏航保持控制器.该回路通过飞机滚转产生侧力,使飞机发生偏航.其控制律表达形式为∃a =K ∀p ∋∀+K ∀I&∋∀d t+K !p ∋!+K !I &∋!d t .式中:∋!=!g -!-k ! !.为保证飞机能够无侧滑且不掉高地协调转弯,还必须加入消除侧滑的控制器和高度保持控制器.在飞机的协调转弯中,横航向的偏航角速度与滚转角速度的关系是 !=gV 0∀,横侧向控制器的基本框架如图5所示.图5 横侧向自驾仪组织结构F i g .5 O rg an i zati on structure o f lateral autop ilot4.3 编队接口关系在考虑到分布式控制系统中的层级概念,前面所述的单机控制系统处于整个编队系统中的最底层.因此底层的控制与上层系统之间数据的交互显得非常重要.考虑双机编队过程中的运动学模型,在图6的参考坐标系中标出了长机和僚机的瞬时位置和速度向量.图6 僚机的参考坐标系F i g .6 T he re ference coo rdina te syste m o fw i ng m an在参考坐标系中,设长机的位置为(x,y ,z),运动学方程为d xd t=V L cos !e - !W y -V W ,d yd t=V L sin !e - !W x ,z =h W -h L .式中:航向角误差为!e =!L -!W .由上式可知,僚机与长机的相对距离(x,y ,z ),僚机编队控制器必须与底层的控制器交互!、h 、V 这3个接口的数据.这3个接口对应于上述所设计的单机自主控制器的输入端.在设计僚机对长机的跟踪控制时,主要是利用x 、#396#智 能 系 统 学 报 第5卷y 、z 三通道控制完成对编队中僚机三方面的控制.其中前向距离与侧向距离可以通过对V W c 与!W c 的控制达到编队保持与变换目的.其控制律的形式为V W c =K xp (x l -x W ),!W c =K yp (y l -y W )+K yI &(y l -y W )d t .式中:下标l 表示长机,下标W 表示僚机.高度的控制可以直接由下层的高度保持控制器实现,无需单独设计控制律形式.5 仿真分析与性能评价5.1 基于FDC 的仿真结果分析FDC 工具箱即飞行动力学与控制工具箱.它是由来自Delft 大学的M arc Rauw 应用Si m ulink 编写的开放的针对于飞行动力学研究的专用工具箱[12].利用M atla b /FDC ,在以下假设条件下进行仿真:1)空速V =15m /s ,迎角 =5.1853∋,高度H =30.2)仿真时间10s .以下仿真试验均在以上的假设条件下进行.5.1.1 速度控制器的仿真结果分析仿真输入:在时间为3s 的时候接收到一个∋V =5m /s 阶跃输入.图7 速度控制器的仿真结果F i g .7 Si m ulati on results of ve locity contro ller从图7中可以看出,UAV 很好地跟踪了指令信号,在2s 之内便已经能够无误差的跟踪.同时在保证速度跟踪到位的时候,由于要保证定高加速,俯仰角也从原有的俯仰角减小到1.5∋左右.并且从高度变化图中,也可以看到UAV 从速度15m /s 增加到20m /s 的过程中,高度仅仅短暂上升了3c m 后又迅速收敛回到原有的高度,达到了定高增速的目的.5.1.2 高度控制器的仿真结果分析高度控制器的仿真结果:此时断开内环俯仰保持对升降舵的控制,同时打开速度保持器,保持速度不变.飞机的平飞条件同上,在时间为1s 处接收一个阶跃输入∋H =6m.仿真结果见图8.图8 高度控制器的仿真结果F i g .8 Si m ulati on results of he i ght contro ll e r从仿真结果可以看出,UAV 需要上升6m 时,飞机俯仰角短暂迅速达到60∋左右,然后又迅速低头回到原始俯仰角,飞机的速度也迅速提高,在1.5s 内迅速恢复到原始速度,从而使得UAV 在2s 内达到期望高度.5.1.3 横航向控制器的仿真结果分析采用的转弯策略是:通过转动副翼,使得UAV 滚转,并启动航向误差消除控制器,调整方向舵,消除侧滑.飞机的初始平飞条件同上,在0时刻接收到一个偏航角为10的阶跃输入.仿真结果见图9~10.图9 横航向控制器的仿真结果F i g .9 S i m u l ation resu lts o f l a tera l au t op il o t#397#第5期 朱杰斌,等:无人机编队飞行的分布式控制策略与控制器设计图10 高度与侧滑角变化F i g .10 Change of heigh t and si deslip ang le从图9中的前2幅子图中可以看到,飞机通过滚转产生偏航,并且滚转角迅速回复到0,最后一副子图则说明了偏航角的变化迅速跟踪到偏航信号,且响应时间不超过1s .从图10的第1幅子图可以看到,UAV 在发生滚转初始时刻,发生一定的掉高,但是在高度保持器的作用下,迅速恢复到0.从图10第2幅子图可以看到,飞机发生轻微的侧滑,但在飞机自身的横航向阻尼以及飞机自身的侧滑消除控制器的共同作用下,迅速恢复到0.以上仿真结果说明本文设计的偏航控制器能够迅速地跟踪到偏航信号,并且能够保证在与纵向耦合的情况下,保证一定程度下不掉高的偏航.5.2 基于线性模型的编队仿真结果分析在验证控制器能够在搭建的非线性模型下依然保持足够的有效性、快速性和精确性之后,拟将本文设计的控制器移植到相同初始条件下的线性模型中,便于多架无人机进行编队的仿真(减少计算量与仿真时间).利用M atlab /Si m ulink 在以下几个假设条件和前提条件下进行仿真.1)2架无人机采用主僚机编队形式;2)飞行速度保持在15m /s ;3)队形初始条件:主僚机前向距离与侧向距离20m;4)队形变化后:主僚机前向距离与侧向距离10m ;5)15s 处长机加入偏航信号;6)仿真时间60s .仿真结果如图11.从仿真结果可以看出,僚机准确地跟踪了长机,并保持了变换后的队形.在长机15s 处发生偏航的情况下,僚机依然能够准确跟踪到长机,并维持设定的队形距离.该仿真结果说明了本文设计的编队控制器均能够达到预期的结果.图11 双机编队仿真结果F i g.11 Si m ulati on results of t wo UAV f o r m ati on5.3 仿真结果比较与性能评价本文设计的控制器是建立在分布式的控制策略的基础之上的.其所搭建的编队控制系统是搭建于各个僚机与长机的姿态与轨迹控制系统之上的.其上层与底层的交互,仅通过3个编队接口即可实现,避免了集中式的大数据量的交换.与文献[5]比较,本文将高度差和内环姿态控制器的计算完全依赖于各UAV 自带的自驾仪的计算,而外环仅仅计算队形中横向与纵向的距离控制.因此有效地减轻了编队控制器自身的计算量,并且达到了良好的控制效果.非线性仿真更加贴近实际飞行环境,因此相较普通的线性模型仿真结果更为逼真,但是其仿真计算量大,在进行多UAV 的编队仿真时,这个缺点会更加明显.本文设计的仿真试验在综合考虑了非线性仿真与线性仿真的优缺点之后,首先在非线性模型下验证所设计的单机控制器,在确保其所设计的控制器能够有效地控制非线性模型的基础之上,将控制器移植到线性模型下进行双机编队控制器的仿真试验.其仿真试验,在不增加仿真计算量的基础上,相对于文献[2]有更大的实用价值.6 结束语本文在深入分析多机编队过程中所必须涉及的队形保持、约束条件以及行为协调等3个关键问题的基础上,引入分布式编队控制策略,将自主控制器的设计与编队接口结合起来,详细论述了单机控制器的控制律设计与编队控制律设计以及二者之间的接口关系.进而通过FDC 工具箱中的非线性动态模型的仿真实验验证了本文所设计的单机自主控制器与编队控制器的有效性,可为编队试飞提供技术支#398#智 能 系 统 学 报 第5卷持.将长机的自主导航与编队过程行为协调和航迹规划等方面将是进一步的研究重点.参考文献:[1]李文皓,张珩.无人机编队飞行技术的研究现状与展望[J].飞行力学,2007,25(1):9 11.L I W enhao,Z HANG H eng.R ev ie w s on un m anned aer i a l veh i c l e for m ati on fli ght[J].F light D ynam ic,2007,25(1):9 11.[2]PACHTER M,DA'ZZO J J,DARGAN J L.A uto m a tic form ati on fli ght contro l[J].A I AA Journa l o fG uidance,Con tro l and D ynam i cs,1994,17(6):838 857.[3]W AN S,C AM PA G,NAPOL I TANO M.D esi gn of f o r m ati on contro l laws for resea rch aircraft m ode ls[C]//P roceed ings of the A I AA G u i dance,N avigati on,and Control Con ference and Exh i bit.A usti n,T exas:A I AA,2003:5730 5740.[4]L I S M,M E HRA K R.G l oball y stable auto m a tic for m ati onflight con tro l i n t wo di m ens i ons[C]//P ro ceedi ngs o f t heA I AA G uidance,N av i gation,and Contro l Conference andExh i b it.M ontrea,l Canada:A IAA,2001:4046 4053. [5]GU Y,SEANNOR B,CAM PA G.D esign and fli ght testi ngeva l uation o f for m ation contro l la w s[J].IEEE T ransacti ons on Contro l System s T echno l ogy,2006,14(6):1105 1112.[6]樊琼剑.多无人机协同编队仿生飞行控制关键技术研究[D].南京:南京航空航天大学,2008.FAN Q i ong ji an.K ey techn i ques research of coopera ti ve for m ati on bio m i m etic fli ght control for mu lti UAV[D].N an ji ng:N anji ng U niversity o f A eronautics and A erospace, 2008.[7]宗令蓓,谢凡,秦世引.基于MA S的无人机编队飞行智能优化控制[J].航空学报,2008,29(5):1326 1333.ZONG L i ngbe,i X I E F an,Q I N Sh i y i n.Intelligent opti m i zi ng contro l o f forma ti on fli ght f o r UAV s based on M AS[J].Ch i nese Journa l o fA eronautics,2008,29(5):1326 1333.[8]方振平,陈万春,张曙光.航空飞行器飞行动力学[M].北京:北京航空航天大学出版社,2005:15 28.[9]M ARKDOOM I H,Q I N Shiy i n.M a tl ab based fli ght contro ldes i gn sche m e f o r UAV s[C]//P roceed i ngs of t he Intelli g ent Contro l and A uto m ation.Ji(nan,Ch i na,2010:1107 1112.[10]TYREU S B D,LUYBE N W L.T un i ng P I contro llers fo ri n teg ra t o r/dead ti m e process[J].Industr i a l and Eng ineeri ng Che m istry R esearch,1992,31(11):2625 2628.[11]张明廉.飞行控制系统[M].北京:航空工业出版社,1994:55 72.[12]RAUW M O.FDC1.4A Si m uli nk too l box f o r fli ght dyna m i cs and con tro l ana lysis[EB/OL].(2005 5 25)[2010 7 24].htt p://ho m e.w anadoo.nl/du tchroll/manua.l ht m.l作者简介:朱杰斌,男,1987年生,硕士研究生,主要研究方向为无人机编队飞行过程建模与智能优化控制.秦世引,男,1955年生,教授,博士生导师,主要研究方向为复杂系统的智能控制、图像处理与模式识别等.作为负责人主持完成(或在研)国家攀登计划项目的子项目、国家)973∗项目的子课题、国家)863∗项目、国家自然科学基金项目、国防科技预研基金项目、武器装备预研基金项目等18项.1999年获全国优秀科技图书奖暨科技进步奖(科技著作)一等奖,1999年获国家第五届工程设计优秀软件金奖.发表学术论文130余篇,出版学术著作1部,研究生教材1部,译著2部.#399#第5期 朱杰斌,等:无人机编队飞行的分布式控制策略与控制器设计。
总第171期2008年第9期舰船电子工程Ship Electronic Enginee ring Vol.28No.943 无人机训练模拟器设计3叶晓慧 王 波(海军工程大学 武汉 430033)摘 要 无人机装备部队后,必须通过大量的飞行训练才能使其形成一定的战斗力。
依靠真实无人机进行训练虽然训练效果好,但费用高、风险大。
使用无人机模拟器可完成无人机的各种训练操作程序,既满足训练要求,又节约训练费用、降低风险。
通过设计一种无人机训练模拟器,介绍模拟器的组成和原理,对构成模拟器的各个组成模块的功能进行了详细的阐述。
关键词 无人机;模拟器;仿真中图分类号 V279Design of Un m anned Aerial Vehicle Tr aini ng Si mulatorYe Xia ohui W ang Bo(Naval Univer sity of Engineering ,Wuha n 430033)Abs tra ct A great deal of training must be d one to for m ba ttle effectivene ss after UAV (Unmanned Aerial Ve hicle)is fitted out t he ar my.Wit h real UAV ,a better t raining eff ect will be ac hieved ,but which is high expenditure a nd risk.It can comple te diffe rent opera tio nal procedures by using UAV t raining simulator ,which not only can satis f y tr aining requirement s ,but can save cost and reduce risk.An UAV simula tor is designe d in t his paper.The constit ution and p rinciple of simulato r is int roduced ,and the function of each module in the syste m is pre sented in detail.Ke y w ords UAV ,simulator ,emulation Class N umber V2791 引言自海湾战争以来,无人机在战场上的成功运用使其受到各国军方的重视,目前从事无人机研究和生产的国家多达三十多个[1]。
摘要四旋翼飞行器是一种四螺旋桨驱动的、可垂直起降的飞行器,这种结构被广泛用于微小型无人飞行器的设计,可以应用到航拍、考古、边境巡逻、反恐侦查等多个领域,具有重要的军用和民用价值。
四旋翼飞行器同时也具有欠驱动、多变量、强耦合、非线性和不确定等复杂特性,对其建模和控制是当今控制领域的难点和热点话题。
本次设计对小型四旋翼无人直升机的研究现状进行了细致、广泛的调研,综述了其主要分类、研究领域、关键技术和应用前景,然后针对圆点博士的四旋翼飞行器实际对象,对其建模方法和控制方案进行了初步的研究。
首先,针对四旋翼飞行器的动力学特性,根据欧拉定理以及牛顿定律建立四旋翼无人直升机的动力学模型,并且考虑了空气阻力、转动力矩对于桨叶的影响,建立了四旋翼飞行器的物理模型;根据实验数据和反复推算,建立系统的仿真状态方程;在Matlab环境下搭建了四旋翼飞行器的非线性模型。
选取四旋翼飞行器的姿态角作为控制对象,借助Matlab模糊工具箱设计了模糊PID控制器并依据专家经验编辑了相应的模糊规则;通过仿真和实时控制验证了控制方案的有效性,并在此控制方案下采集到了输入输出数据;利用单片机编写模糊PID算法控制程序,实现对圆点博士四旋翼飞行器实物的姿态控制。
本设计同时进行了Matlab仿真和实物控制设计,利用模糊PID算法,稳定有效的对四旋翼飞行器的姿态进行了控制。
关键词:四旋翼飞行器;模糊PID;姿态控制ⅠAbstractQuadrotor UA V is a four propeller driven, vertical take-off and landing aircraft, this structure is widely used in micro mini unmanned aerial vehicle design and can be applied to multiple areas of aerial, archaeology, border patrol, anti-terrorism investigation, has important military and civil value.Quadrotor UA V is a complicated characteristic of the complicated characteristics such as the less drive, the multi variable, the strong coupling, the nonlinear and the uncertainty, and the difficulty and the hot topic in the control field.Research status of the design of small quadrotor UA V were detailed and extensive research, summarized the main classification, research areas, key technology and application prospect of and according to Dr. dot quadrotor actual object, the modeling method and control scheme were preliminary study.First, for the dynamic characteristics of quadrotor UA V, dynamic model of quadrotor UA V is established according to the theorem of Euler and Newton's laws, and consider the air resistance and rotation torque for the effects of blade, the establishment of the physical model of the quadrotor UA V; root according to experimental data and repeated calculation, the establishment of system simulation equation of state; under the MATLAB environment built the nonlinear model of the quadrotor UA V Select the attitude of the quadrotor angle as the control object, with the help of matlab fuzzy toolbox to design the fuzzy PID controller and according to experience of experts to edit the corresponding fuzzy rules; through the simulation and real-time control verify the effectiveness of the control scheme, and this control scheme under the collection to the data input and output; written by SCM fuzzy PID control algorithm, dots, Quad rotor UA V real attitude control. The design of the Matlab simulation and the physical control design, the use of fuzzy PID algorithm, the stability of the four rotor aircraft attitude control.Keywords:Quadrotor UA V;F uzzy PID;Attitude controlⅡ目录摘要(中文) (Ⅰ)摘要(英文) (Ⅱ)第一章概述 (1)1.1 课题背景及意义 (1)1.2 四旋翼飞行器的研究现状 (2)1.3 四旋翼飞行器的关键技术 (5)1.3.1 数学模型 (6)1.3.2 控制算法 (6)1.3.3 电子技术 (6)1.3.4 动力与能源问题 (6)1.4 本文主要内容 (6)1.5本章小结 (7)第二章四旋翼飞行器的运动原理及数学模型 (7)2.1四旋翼飞行器简介 (7)2.2 四旋翼飞行器的运动原理 (8)2.2.1 四旋翼飞行器高度控制 (8)2.2.2 四旋翼飞行器俯仰角控制 (9)2.2.3 四旋翼飞行器横滚角控制 (9)2.2.4 四旋翼飞行器偏航角控制 (10)2.3四旋翼飞行器的数学模型 (11)2.3.1坐标系建立 (11)2.3.2基于牛顿-欧拉公式的四旋翼飞行器动力学模型 (12)2.4 本章小结 (15)第三章四旋翼飞行器姿态控制算法研究 (15)3.1模糊PID控制原理 (15)3.2 姿态稳定回路的模糊PID控制器设计 (16)3.2.1 构建模糊PID控制器步骤 (17)3.2.2 基于Matlab的姿态角控制算法的仿真 (22)3.3 本章小结 (25)第四章四旋翼飞行器飞行控制系统软件设计 (25)4.1 模糊PID控制算法流程图 (25)4.2 系统实验及结果分析 (26)4.3 本章小结 (27)第五章总结与展望 (28)5.1 总结 (28)5.2 展望 (28)参考文献 (28)第一章概述有史以来,人类一直有一个梦想,那就是可以像蓝天上自由翱翔的鸟儿一样。
无人机飞控系统设计一、前言无人机技术是近年来迅速发展的重要领域,随着其在民用领域的应用不断扩大,在无人机的关键技术领域所需的飞控系统也必须不断创新和完善。
飞控系统是无人机的“大脑”,它对于实现无人机各项功能至关重要。
本文将为大家详细介绍无人机飞控系统设计的重要步骤和关键技术。
二、无人机飞行原理无人机通过电动机输出的动力来推动旋翼或者螺旋桨实现飞行,而飞控系统则是负责控制无人机的姿态,使其不会出现不良运动状态,同时为无人机实现自主控制和飞行功能提供保障。
无人机的运动姿态通常由飞行控制器、陀螺仪、加速度计、磁力计、气压计等传感器共同协作完成。
其中飞行控制器是无人机飞控系统的核心部件,而其他传感器则可以分别感知无人机的加速度、角速度、方位等参数,为飞行控制器提供信息支持。
三、无人机飞控系统设计流程(一)功能需求分析飞控系统的功能需求分析是无人机飞控系统设计的第一步,需要确立无人机的基本功能需求。
具体包括但不限于:1. 控制无人机的方位和姿态;2. 实现无人机的起飞和着陆;3. 进行高度和速度的控制;4. 实现自主控制和遥控操作。
(二)飞行控制器选择飞行控制器是无人机飞控系统的核心部件,需要考虑多种因素进行选择。
例如需要考虑飞行控制器的处理能力、接口类型和拓展性等因素。
同时还需要考虑无人机的尺寸和重量等不同特点,选择适合无人机飞行控制系统的控制器。
(三)传感器选择无人机飞控系统采用传感器来感知无人机的运动姿态,选用高品质的传感器有助于提高系统的精度和可靠性。
传感器种类主要涉及陀螺仪、加速度计、磁力计和气压计等。
(四)控制算法设计控制算法是确定飞行控制器如何处理传输数据和实现飞行控制的关键因素。
常见的控制算法主要包括PID算法、LQR控制算法和滑模控制算法等。
大多数情况下,需要根据对无人机模型的理解和实际需求来量身定制算法。
(五)整体系统测试和验证根据设计要求,需要对无人机飞控系统的各项功能进行全面测试和验证,确保系统的稳定性和可靠性。
飞行器控制系统设计与仿真研究随着社会科技的不断发展,飞行器控制系统的研究与设计也变得越来越重要。
飞行器控制系统是指利用电子技术,对飞行器进行控制、导航、稳定等功能的系统,是航空航天领域中的重要组成部分之一。
本文将从控制系统的设计与仿真两个方面进行深入探讨,以期对相关领域的读者提供一些有价值的思考和参考。
一、控制系统的设计1.从系统需求出发在设计控制系统时,首先需要确定系统的需求。
系统需求包括控制精度、控制速度、控制范围等多个方面。
对于不同类型的飞行器,系统需求也不同。
例如,大型客机对控制精度和速度的要求更高,而小型直升机对机动性和控制响应时间的要求更高。
2.选择适当的控制器根据系统需求,我们可以选择适当的控制器。
常见的控制器有PID控制器、模糊控制器和神经网络控制器等。
不同的控制器有其各自的特点和适用范围,在选择时需要综合考虑相关因素,以确保控制系统能够按照预期的方式进行。
3.优化参数在确定了控制器后,我们需要对其进行参数的优化。
优化参数可以提高控制器的响应速度和控制精度,提高系统的稳定性和可靠性。
常见的优化方法包括基于模型的优化和基于试验的优化。
二、仿真研究仿真是一种用计算机模拟现实世界的方法。
在飞行器控制系统的研究中,仿真技术可以帮助我们验证控制系统的设计是否能够满足系统需求,并通过模拟实验进行参数优化。
1.建立数学模型在进行仿真研究时,首先需要建立数学模型。
数学模型可以准确地描述飞行器的动力学特性和环境因素的影响,是仿真研究的基础。
建立数学模型需要综合考虑多个因素,如飞行器的质量、飞行器与空气的相互作用、引擎的性能等。
2.验证模型在建立数学模型后,我们需要对其进行验证。
验证模型需要进行多种测试,如策略测试、稳态测试和动态测试等。
通过验证模型,我们可以发现模型的缺陷,并进行修正,以确保仿真研究的准确性和可靠性。
3.仿真实验在验证模型后,我们可以进行仿真实验。
仿真实验可以模拟真实飞行的各种情况,并进行参数优化。
飞行器控制系统的设计与实现随着航空技术的不断进步,飞机、无人机等飞行器已经成为了人们工作、生活中必不可少的工具。
而这些飞行器的高效、安全、稳定的运行离不开优秀的飞行器控制系统。
本文主要讨论飞行器控制系统的设计与实现,包括控制系统的组成、控制系统的设计思路、控制系统的实现方法等方面。
一、飞行器控制系统概述飞行器控制系统包括两大部分:飞行参数的测量和控制器的控制。
飞行参数的测量可以通过惯性测量单元(IMU)、陀螺仪、加速度计、磁力计等多种传感器获得,而控制器的控制则是根据测量的飞行参数来实现的。
控制系统主要包括传感器、数学模型、控制器以及执行机构。
飞行器中的传感器包括加速度计、陀螺仪、磁力计等。
数学模型是将飞行器进行数学建模的过程,其基本思路是在飞行器的动力学、气动学等基础上推导出整个控制系统的数学模型。
控制器的作用是控制飞行器的动作,实现期望的飞行轨迹。
执行机构包括电机、推进器等,其作用是将控制指令转化为物理动作。
二、飞行器控制系统设计思路飞行器控制系统的设计思路涉及到几个问题。
首先,需要对飞行器的运动学、动力学、气动学进行研究,建立数学模型。
其次,需要确定控制策略,即控制器的设计方法。
最后,需要将控制策略应用到实际控制系统中。
对于这些问题,下面进行详细阐述。
(一)飞行器数学模型建立数学模型是控制系统设计的第一步。
数学模型是根据飞行器的运动学、动力学、气动学等方面的知识构建的模型,用于预测飞行器的运动轨迹和状态。
常见的数学模型包括基于牛顿力学的刚体模型、基于空气动力学的流体力学模型等。
(二)控制策略的选择控制策略的选择是控制系统设计的第二步。
在这个阶段,需要根据数学模型进行控制策略的选择。
常见的控制策略包括PID控制、LQR控制、神经网络控制等。
这些控制策略的选择需要考虑控制系统的性能指标,如稳定性、响应速度、鲁棒性等。
(三)控制器设计在确定控制策略之后,需要进行具体的控制器设计。
在PID控制器的设计中,需要设置合适的Kp、Ki、Kd系数;在LQR控制器中,需要设计状态权重矩阵、控制权重矩阵等。