运动单站对运动目标的快速高精度测向定位研究
- 格式:pdf
- 大小:288.23 KB
- 文档页数:5
GPS测量坐标方式及对应精度引言全球定位系统(GPS)是一种利用卫星信号来确定地理位置的技术。
它以高精度的方式给出了地球上任何一个点的经纬度坐标。
本文将介绍GPS测量坐标的方式以及对应的精度。
GPS测量坐标方式单点定位单点定位是GPS测量坐标的最基本方式,也是最常用的方式。
通过接收至少4颗卫星的信号,GPS接收机能够计算出接收机所在位置的经度、纬度以及海拔高度。
单点定位的原理是借助卫星信号的传输时延来计算位置。
GPS信号的传播速度近似为光速,GPS接收机通过测量信号的传播时延,从而计算出卫星与接收机之间的距离。
通过多个卫星的距离测量,接收机可以定位其所在的位置。
差分定位差分定位是一种通过比较两个或多个接收机的信号,来提高定位精度的技术。
其中一个接收机称为基站,它的位置已知。
其他接收机称为流动站,它们的位置需要测量。
在差分定位中,基站接收到卫星信号,并计算出自己的位置信息。
然后,通过与流动站的信号进行比较,基站可以确定流动站的位置误差,并将其传递给流动站。
流动站利用该位置误差进行校正,提高自身的定位精度。
差分定位的精度受到基站与流动站之间的距离限制。
一般来说,基站越近,定位精度越高。
RTK定位实时运动定位(RTK)是一种高精度定位技术,适用于需要高精度、高实时性的应用场景,例如测量、地质勘探等。
RTK定位与差分定位类似,也是通过比较基站和流动站的信号来提高定位精度。
不同之处在于,RTK定位中基站和流动站之间的数据传输是实时的。
在RTK定位中,基站接收到卫星信号,并计算出自己的位置信息。
然后,通过与流动站的信号进行比较,并实时将位置误差传递给流动站。
流动站利用该位置误差进行校正,以实现高精度定位。
GPS测量坐标的精度GPS测量坐标的精度是指测量结果与实际位置之间的差异程度。
精度通常用米(m)来表示。
对于单点定位,GPS接收机的位置精度通常在10至20米之间。
这意味着测量结果与实际位置的差异可能在10至20米之间。
精密单点定位摘要关键词:(GPS、精密单点定位、数学模型、静态精度分析)单点定位就是根据一台接收机的观测数据来确定接收机位置的方式,它只能采用伪距观测量,可用于车船等的概略导航定位。
也称为“绝对定位”。
精密单点定位--precise point positioning(PPP)所谓的精密单点定位指的是利用全球若干地面跟踪站的GPS 观测数据计算出的精密卫星轨道和卫星钟差, 对单台GPS 接收机所采集的相位和伪距观测值进行定位解算。
利用这种预报的GPS 卫星的精密星历或事后的精密星历作为已知坐标起算数据; 同时利用某种方式得到的精密卫星钟差来替代用户GPS 定位观测值方程中的卫星钟差参数; 用户利用单台GPS 双频双码接收机的观测数据在数千万平方公里乃至全球范围内的任意位置都可以2- 4dm级的精度, 进行实时动态定位或2- 4cm级的精度进行较快速的静态定位, 精密单点定位技术是实现全球精密实时动态定位与导航的关键技术,也是GPS 定位方面的前沿研究方向。
1.引言GPS是美国从20 世纪70 年代开始研制的, 于1994 年全面建成, 具有在海、陆、空进行全方位实时三维导航与定位能力的新一代卫星导航与定位系统。
尤其是经过近几年的研究,GPS 更在测绘、航空遥感和气象等方面有了新的应用, 并以全天候、高精度、自动化、高效益等显著特点, 赢得广大用户的信赖。
随着对定位精度要求的不断提高, 人们对GPS卫星星历的精度和实时性提出了越来越高的要求。
卫星的星历, 是描述有关卫星运动轨道的信息。
利用GPS进行定位, 就是根据已知的卫星轨道信息和用户的观测资料, 通过数据处理来确定接收机的位置及其载体的航行速度。
所以, 精确的轨道信息是精密定位的基础。
GPS 的卫星星历按照精度可分为精密星历和广播星历。
精密星历是由国际GPS服务中心( IGS) 通过Internet 发布,它的轨道精度可达到10cm 左右, 足以满足精密定位的需要。
无参考点Link16信号定位方法研究蒋春山;邵国峰【摘要】JTIDS系统的Link16信号工作在正交跳频状态,单个侦察站根据接收到的脉冲信号相互间的时间差,就可以描绘出网内用户的相对航迹.如果网内有一个点的位置已知,即参考点,其它所有点的位置都可以确定,这种有参考点的Link16信号单站定位方法,在不同作战环境中其可用性与能否找到参考点直接相关.研究提出一种测量相对时差和相对电平相联合的无参考点单站定位新方法,可以在不同的作战环境中实现对Link 16信号的单站定位,以满足实战需求.【期刊名称】《中国电子科学研究院学报》【年(卷),期】2015(010)004【总页数】5页(P367-371)【关键词】参考点;相对时间;相对电平;单站定位【作者】蒋春山;邵国峰【作者单位】中国电子科技集团公司第36研究所,嘉兴314000;中国电子科技集团公司第36研究所,嘉兴314000【正文语种】中文【中图分类】TN911.7联合战术信息分发系统(JTIDS)是为适应美军联合作战,而由美三军统一研制的综合通信、导航、识别系统,是一种大容量、保密、抗干扰、时分多址的信息分发系统。
这个系统在时、频域上有显著的特点[1-2]。
时域上,JTIDS采用时分多址(TDMA)工作方式,一个时隙为1/128 s或7.8125 ms。
如图1所示,每个时隙发射一组(258个或者444个)脉冲信号,脉冲宽度为6.4μs,脉冲周期为13μs。
在每个时元中给每个JTIDS系统的成员分配一定数量的时隙,每个系统成员均备有准确的时钟,而且与时间基准成员的时钟同步,形成统一的时间系统。
频域上,JTIDS采用了跳频技术,如图2所示,跳频在各脉冲之间进行,跳频点以3 MHz间隔均匀分布,共51个频点,跳频周期为13微秒。
载频从969~1 008 MHz(13个跳频点)、1 053~1 065 MHz(5个跳频点)和1 113~1 206 MHz(33个跳频点)三个子频段均匀选取跳频点,脉间跳频间隔30 MHz以上[3-4]。
精密单点定位ppp精密单点定位(precise point positioning ,缩写PPP,指的是利用全球若干地面跟踪站的GPS观测数据计算出的精密卫星轨道和卫星钟差对单台GPS接收机所采集的相位和伪距观测值进行定位解算。
在卫星导航应用之中,GPS作为定位的意义越来越重要,不论是军事上还是工程等方面上,导航定位的研究依然是一个不老的研究主题。
精密单点定位更是导航定位中的一个很值得研究的问题。
PPP根本上讲属于单点定位范畴,那么单点定位又是怎样进行测量定位的呢?单点定位是利用卫星星历和一台接收机确定待定点在地固坐标系中绝对位置的方法,其优点:一台接收机单独定位,观测组织和实施方便,数据处理简单;缺点:精度主要受系统性偏差(卫星轨道、卫星钟差、大气传播延迟等)的影响,定位精度低。
应用领域:低精度导航、资源普查、军事等。
对于单点定位的几何描述,三个站星距离,作三个球面三个球面两两相交于两点,如下图所示:站星距离的测定:保持GPS卫星钟同GPS接收机钟同步;GPS卫星和接收机同时产生相同的信号;采用相关技术获得信号传播时间;GPS卫星钟和GPS接收机钟难以保持严格同步,用相关技术获得的信号传播时间含有卫星钟和接收机钟同步误差的影响。
单点定位虽然是只需要一台接收机即可,但是单点定位的结果受卫星星历误差、卫星钟差以及卫星信号传播过程中的大气延迟误差的影响较为显著,故定位精度一般较差。
PPP针对单点定位中的影响,采用了精密星历和精密卫星钟差、高精度的载波相位观测值以及较严密的数学模型的技术,如用户利用单台GPS双频双码接收机的观测数据在数千万平方公里乃至全球范围内,点位平面位置精度可达1~3cm,咼程精度可达2~4cm,实时定位的精度可达分米级。
精密单点定位的数学模型,对于伪距:—(X -X)2 (y i -Y)2 (z -Z)2 -V ion -V trop c V t S -C V t R误差方程为:V i =Ti dX —m i dY—ndz+c V t S —c V t R+(P°)i — (V i。

GPS测量坐标方式及对应精度要求是什么1. 引言全球定位系统(GPS)是一种利用卫星定位技术确定地球上特定位置的系统。
在现代测量和导航应用中,GPS已经变得非常重要。
然而,GPS测量坐标方式和对应精度要求是常见的问题,本文将对这些内容进行详细介绍。
2. GPS测量坐标方式2.1 单点定位单点定位是最简单和最常用的GPS坐标测量方式。
它仅使用单一的GPS接收器接收信号,并利用接收到的卫星信号来计算位置坐标。
单点定位方式适用于定位要求不高、测量精度要求较低的应用。
2.2 相对定位相对定位是一种更复杂但更精确的GPS坐标测量方式。
它使用两个或多个GPS 接收器,并通过测量接收器之间的距离差异来计算位置坐标。
相对定位方式适用于需要更高定位精度的应用,如地质测量、测绘和工程测量。
2.3 动态定位动态定位是一种用于测量物体运动轨迹的GPS坐标测量方式。
它利用GPS接收器在物体运动过程中连续接收卫星信号,并根据接收到的信号计算物体的实时位置坐标。
动态定位广泛应用于车辆导航、船舶定位和飞行器导航等领域。
3. GPS测量精度要求GPS测量精度通常用水平精度和垂直精度来描述。
3.1 水平精度水平精度是指在水平方向上的GPS测量误差,通常以米为单位表示。
不同应用领域对水平精度的要求不同。
例如,汽车导航系统对水平精度的要求可能在几米以内,而地质勘探测量对水平精度的要求可能在毫米或亚毫米级别。
3.2 垂直精度垂直精度是指在垂直方向上的GPS测量误差,也通常以米为单位表示。
与水平精度类似,不同应用领域对垂直精度的要求也有所不同。
例如,建筑测量可能要求垂直精度在几毫米以内,而一般导航应用可能对垂直精度的要求相对较低。
4. 影响GPS测量精度的因素GPS测量精度受到许多因素的影响,以下列举了其中一些主要因素:4.1 卫星几何配置卫星几何配置是指可见卫星的数量和位置相对于接收器的分布情况。
理想情况下,卫星应该均匀分布且数量足够多。
《超短波无线电测向定位技术研究》一、引言超短波无线电测向定位技术是一种通过无线信号进行方向和位置确定的技术。
该技术被广泛应用于无线电测向比赛、野外生存救援、移动目标跟踪等多个领域。
随着通信技术的飞速发展,对无线电测向定位的准确性和实时性要求也日益提高,因此,研究超短波无线电测向定位技术具有重要意义。
二、超短波无线电测向定位技术原理超短波无线电测向定位技术基于无线电波的传播特性和信号强度差异来实现目标方向的测量。
在信号传输过程中,无线设备根据收到的信号强度的差异来判断信号的方向。
通过对多个不同位置上收到的信号强度进行测量,结合信号传播模型和算法处理,即可实现对目标的测向定位。
三、关键技术研究1. 信号处理技术:超短波无线电信号在传输过程中会受到多种因素的影响,如多径效应、噪声干扰等。
因此,需要采用先进的信号处理技术,如数字滤波、信号增强等,以提高信号的信噪比和抗干扰能力。
2. 测向算法研究:测向算法是超短波无线电测向定位技术的核心。
目前常用的测向算法包括基于到达角(AOA)的测向算法、基于到达时间差(TDOA)的测向算法等。
这些算法各有优缺点,需要根据实际应用场景选择合适的算法。
3. 定位系统设计:超短波无线电测向定位系统通常由多个测向站组成,每个测向站需要配置相应的接收设备和处理器。
在系统设计过程中,需要考虑如何合理布局测向站、如何进行数据处理和结果展示等问题。
四、应用场景分析1. 无线电测向比赛:在无线电测向比赛中,参赛者需要利用超短波无线电测向定位技术找到隐藏的信号源。
这需要参赛者具备较高的信号处理和测向定位能力。
2. 野外生存救援:在野外生存救援中,超短波无线电测向定位技术可以帮助救援人员快速找到被困者的位置,提高救援效率。
3. 移动目标跟踪:超短波无线电测向定位技术还可以用于移动目标的跟踪,如车辆、无人机等。
通过在目标上安装无线发射设备,并结合地面或空中的接收设备,可以实现目标的实时跟踪和定位。
gps定位实验报告GPS定位实验报告引言:GPS(全球定位系统)是一种基于卫星的导航系统,通过接收来自卫星的信号来确定地理位置。
在本次实验中,我们对GPS定位进行了一系列的测试和研究,以评估其准确性和可靠性。
一、实验目的GPS定位系统在现代社会中广泛应用于导航、地图制作、航空航海等领域。
本实验的目的是探究GPS定位的原理和性能,并评估其在不同环境条件下的准确性和可靠性。
二、实验方法1. 实验设备:我们使用了一台配备GPS接收器的移动设备,并在不同的地理位置进行了测试。
2. 实验步骤:a. 打开GPS接收器,并等待信号连接。
b. 在不同的地理位置进行测试,包括室内、室外、城市中心和郊区等。
c. 记录GPS接收器显示的经纬度信息,并与实际位置进行对比。
三、实验结果1. 准确性评估:a. 在室外开阔地区进行测试时,GPS定位显示的经纬度与实际位置非常接近,误差一般在几米以内。
b. 在城市中心和郊区等复杂环境中,GPS定位的准确性有所下降,误差可能会增加到十几米。
c. 在室内环境下,GPS定位的准确性明显降低,误差较大,可能达到数十米甚至更多。
2. 可靠性评估:a. 在大部分情况下,GPS定位系统表现出较高的可靠性,能够快速连接到卫星并提供准确的定位信息。
b. 然而,在高楼大厦密集的城市中心等环境中,GPS信号可能受到阻塞或干扰,导致定位不准确或无法定位。
c. 在室内环境下,由于建筑物的屏蔽效应,GPS信号的接收受到限制,造成定位不准确或无法定位的情况较为普遍。
四、实验讨论1. GPS定位的准确性主要受到环境条件的影响。
在开阔的地区,GPS定位准确性较高;而在复杂的城市环境和室内环境下,准确性较低。
2. GPS定位的可靠性受到地理环境和建筑物的影响。
在高楼大厦密集的城市中心,GPS信号容易受到阻塞或干扰,导致定位不准确或无法定位。
3. GPS定位的技术不断发展,目前已经出现了一些增强定位的技术,如差分GPS和增强型GPS等,可以在一定程度上提高定位的准确性和可靠性。
测量与地质GPS精密单点定位(PPP)原理、测试及应用叶达忠(广西水利电力勘测设计研究院,南宁 530023)[摘要] 通过介绍了精密单点定位技术(PP P)发展背景、精密单点定位技术概念及原理,并利用GPS观测站数据进行国内外软件测试计算、对比得出结论,最后通过实际工程验证。
[关键词] 精密单点定位技术;卫星轨道;精密钟差;非差观测方程;参数随机模型[中图分类号] P228.4 [文献标识码] B [文章编号] 1003-1510(2007)01-0024-031 精密单点定位技术的发展背景当今的卫星定位技术正向着实时、高精度、高可靠性的方向发展,网络化、集中式的数据服务(Data Serv ice)是这些技术的典型特征。
定位技术的领域界限逐渐变得模糊,随着理论的不断完善,各种定位方法相互融合,趋向统一。
定位技术的发展越来越多地依赖于计算机、无线通信、网络等的技术发展,它的技术发展呈现出多元化和学科交叉的特点。
2 精密单点定位技术的概念精密单点定位是早在20世纪70年代美国子午卫星时代针对Doppler精密单点定位提出的概念。
利用预报的GPS卫星的精密星历或事后的精密星历作为知坐标起算数据;同时利用某种方式得到的精密卫星钟来替代用户GPS定位观测值方程中的卫星钟差参数;用户利用单台GPS双频双码接收机的观测数据在数千万平方公里乃至全球范围内的任意位置都可以分米级的精度进行实时动态定位或以厘米级的精度进行较快速的静态定位,这一导航定位方法称为精密单点定位(Precise Po int Position-ing),简称为(PPP)。
3 精密单点定位原理及数学模型[1]在GPS定位中,利用相位组合消除电离层延时的影响后,给定卫星轨道和精密钟差,采用精确的数学模型,单站就可以计算出接收机的精确位置。
GPS接收机量测的相位观测值是接收到的卫星信号相位与接收机本机振荡相位之差。
ij(t r)= ri(t r)- sj(t r)+N+ i j(t r)(1)式中:t r 接收机记录的采样时刻;ri(t r) 时刻测站i本机振荡相位;sj(t r) 时刻测站i接收到卫星j的载波相位;N 时刻测站i卫星j的整周模糊度;ij(t i) 时刻测站i卫星j的观测噪声。
电子信息对抗技术・第28卷 2013年7月第4期 周龙健,罗景青
运动单站对运动目标的快速高精度测向定位研究 5
中图分类号:TN971.1 文献标志码:A 文章编号:1674—2230(2013)04—0005—04
运动单站对运动目标的快速高精度测向定位研究 周龙健,罗景青 (电子工程学院,合肥230037) 摘要:现有的单站定位算法大都是运动单站对固定目标辐射源或者固定单站对运动目标辐射 源的定位,而运动单站对远距离的运动目标很难实现快速高精度的定位。针对平面直角导航 坐标系下,运动单站对运动目标的高精度定位综合算法问题,分析了目标的可观测性,给出了 不可观测原因,提出了基于多项式拟合的最小二乘定位算法,通过多次仿真实验发现,此算法 得到的定位结果可以达到Cramer-Rao下界,说明算法是有效的。结论是侦察机在一定的机动 条件下,可以实现对远距离目标的快速高精度定位。 关键词:运动单站;运动目标;多项式拟合;最小二乘;Cramer-Rao界 DOI:10.3969/j.issn.1674—2230.2013.04.002
Fast and Accurate DF Location of the Single Moving Station to a Moving Object
ZHOU Long—jian,LUO Jing-qing (Electronic Engineefing Institute,Hefei 230037,China) Abstract:The traditional methods of location are mainly for the single moving station to the fLxed ob— jection or the fixed station to the moving objection.However,it is very difficult to achieve a fast and accurate location of moving station to the moving objection.A high precision location algorithm is pro— vided based on the least square multiple(LSM)muhinomial fitting method.Meanwhile,the reason why the azimuth measured by a single station moving at a fixed speed could not calculate the position of target is explored.And the result is close to the CRLB by many times experiments.It suggests that it is effective which could realize a fast accurate locthion of single moving station to the moving objec— tion on the condition of maneuverability. Key words:moving station;moving objection;multinomial fitting;LSM;CRLB
1 引言 采用被动方式工作的无源定位技术相对于有 源定位技术具有作用距离远、隐蔽接收、不易被对 方发觉的优点,对于增强系统在复杂电磁环境下 的生存能力和工作能力具有重要意义。单站无源 定位技术实现的传统方法主要有:测向定位法、到 达时间定位法、多普勒频率定位法、方位/N达时
间定位法和方位/多普勒频率定位法。 在测向定位法中,常用的是三角定位法,即通 过一段时间的角度信息积累,进行交叉定位。但 鉴于三角定位法对角度测量误差的敏感性,在无 法提高测角精度的情况下,定位精度很难提高。 本文针对运动单站对运动目标的测向定位技术展 开研究,在一定的条件下可以实现对运动目标的
收稿日期:2013—0l一05:修回日期:2013—01—21 作者简介:周龙健(1989一),男,硕士研究生,研究方向为信号处理;罗景青(1955一),男,教授,博士生导师,研究方向为空间信息处理、阵
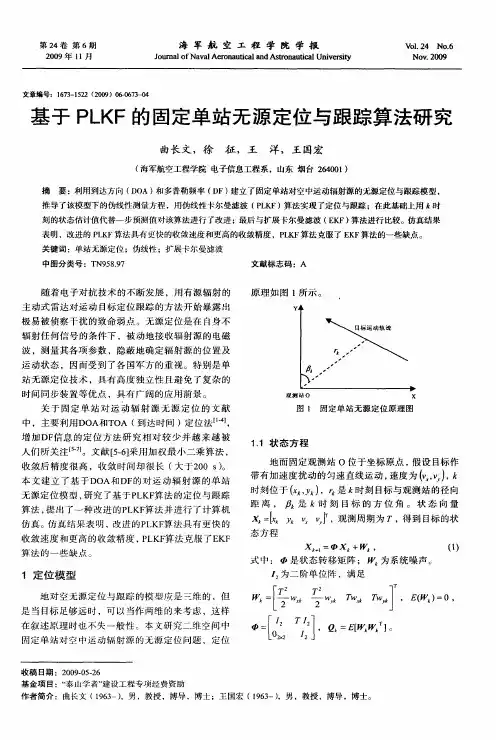
列信号处理、电子对抗信息处理。 6 运动单站对运动冒 嘉度测向投稿邮箱:d刁。【dkj @126.。 运动单站对运动目标的快速高精度测向定位研究 们 : lKJ ‘ “ 快速高精度定位。 2定位原理 设天线阵列的各阵元是线性布置的,如图l, 其基线方向与 轴方向一致,也是与前进方向一 致。假定信号是窄带的,采样是正交双通道采样, 采集的信号以复数的形式表示,分析可知,以第一 个阵元为参考阵元,l,轴方向为参考方向,则第 m时间片的观测数据矩阵可写为: um=…a( ) +y (1)
。 丁 图1测向天线阵 其中,um为 ,『: lt +t , =0,1,2,3…的数 据矩阵,a( )为 维列矢量, 为Ⅳm维行矢 量,而 为t , 1 t +t ,,, =0,1,2,3…的观 测噪声。 a( )=
【 , sin ̄m, sinq ̄m,, sinq ̄m】 (2)
其中,d ,i=1,…,L一1为阵元i到参考阵元的 距离, 为第m时间片开始时刻tm,O时辐射源所 在的角度,tm,O时该接收机的位置为 . ,辐射源 的速度为 ,辐射源to=to,o的位置 的函数,
, = ( ,。)= ,p。+fO' ̄Vp( )d =【 二]
sm ̄om一 !Q ! :Q二 二 巳: {[ O+V ( ,0一 0)一 , ] +[YeO+V (f ,o—to)一 , ] } /2
(3) 根据上述关系,可以利用多次测向的数据对运 动辐射源定位。定位的算法可用最d ̄---乘估计法。
3定位算法 3.1直接参数最小二乘估计算法 无测量误差时,在第m时间片,信号到达角 与侦察站位置( , , , )T、目标初始位置
( y 0)T、目标速度( ,'13ey)T的关系为: cosq ̄= YeO Vey t 0
糍to ,cos 0'(4) m + L m,一 一 ,m ”‘
或 [ 0+ (tm,0一to)一 p,m]c0s m= [Y o+ (tm,0一t0)一 ,m]sin m (tm.0一to)cos ̄p 一 (tm,O—to)sinq ̄ = (YeO一 , )sin ̄o 一(XeO— p, )COS ̄Pk m=0,1,…,M一1 (5) 可以写成: XeoeOSr ̄m—Yeosin ̄m+ (tm,O—to)cosq ̄ 一 (tm,O—to)sinq ̄m
,meos(pm一 ,msinq ̄ m=0,1,…,M一1 (6) 考虑到测量误差,(6)式写成矢量的形式: z=HX+P (7) 其中,
l
= 日=
p oeos ̄Oo一,p,osmq ̄o p,leO¥ ̄l一了p.1slnq ̄
xp,M—lcos ̄oM一1一yp,M一1smq ̄M一1
eO e1 : ●
eM一1 eosq ̄o——sln ̄oo eOS ̄l——sin ̄ol
・COS ̄0M一1 一sin ̄oM一1 一(to.o—to)sinq ̄o
一(t1.0一to)sin ̄p]
一(tM—1.0一to)sinq ̄一1
(to.0一to)cos(p0 (tl,o—to)c0s 1
(tM一1.0一to)cosq ̄M—l
而P是由于测量误差引起的误差项。 由(7)式,我们可以用最小二乘估计的方法求 得运动辐射源的初始位置( Ye0)T和目标速度 ( ,Vey)T,即x的估计值如下:
=(日T日)一 日Tz (8) 3.2基于多项式拟合的最小二乘估计算 法 在没有噪声的情况下侦察机所得到的测向数
研; ?: 嘶 电子信息对抗技术・第28卷 2013年7月第4期 周龙健,罗景青
运动单站对运动目标的快速高精度测向定位研究 7
据应该是一条平滑的曲线,而由于测向误差存在, 导致所得到的测向数据呈现杂乱无序。我们可以 对含误差的测向数据进行平滑处理。 考虑到可以通过多项式曲线拟合来逼近测向 角函数,即将信号到达角用多项式函数表示。因 此,我们可以通过对所得到的含误差测向数据进 行多项式拟合来修正测向角,得到信号到达角的 近似解。 利用修正后的测向角,对运动辐射源的初始 位置定位。
4可观测性问题 考察(5)式,若侦察机也是匀速直线运动时,
,m Xp,0+ tm
,0一to) (9)
Yp,m Yp,0+ Py tm,0一to) 这时,(5)式变为: ( 一Vpx)(tm,O—to)COS(/9m一 ( 一 P )( ,o—to)sin9 : (10) (Yeo—Yp,o)sincfm一( 0一xp,o)cos9 m=0,1,…. 一1 式(10)是关于未知数( 0一 ,0),( 0一Yp,0), ( 一 ),( 一 )的齐次方程,只能存在零解 或不确定解。 实际上,从物理含义可知,若将坐标系放在侦 察平台上,这时,关于运动辐射源的各次测向,等 同于一个静止观测站对匀速运动的辐射源测向定 位问题,不能确定目标的航迹。因为若某航迹满 足一组测量方程,则任意与这条航迹平行的另一 航迹,也满足同样的一组测量方程,如图2所示。
图2静止侦察机对匀速运动目标测向
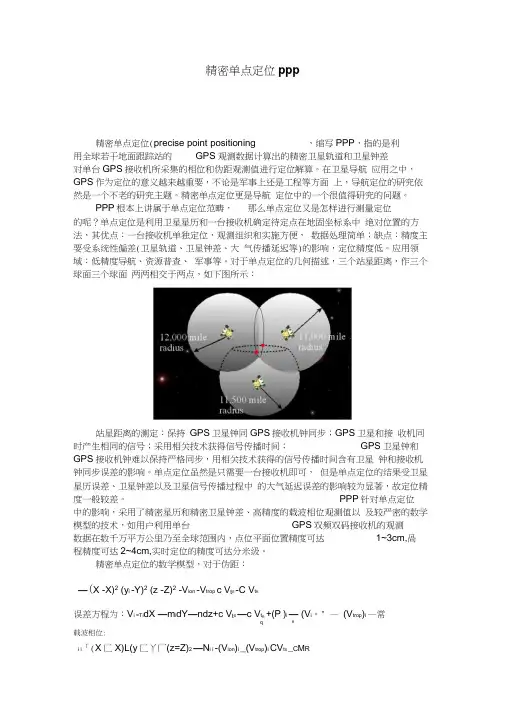
5仿真分析 5.1基于多项式拟合的最小二乘估计算 法可行性分析 5.1.1侦察机做曲线运动情况 假定目标辐射源的位置运动参数为:目标初 始位置与侦查站初始位置之间的距离为r0'方位 角为 0,则目标初始位置( 0, 0)T= (rocosq ̄0,rosin9o)T,目标速度( , )T= (0.3km/s,0)T。侦察站沿着y轴方向做曲线的机 动运动,侦察站的机动参数为: (t)=V,xCOS((U t),Vpy(t): 其中, =0.2km/s, =0.27c, =0.3km/s 在无测量误差时,信号的到达角为 (t),即:
=arctan (11) 图3给出了在曲线运动情况下,在 0=90。 时,通过5阶多项式拟合后数据与真实值之间的 对比图。
(a)真实值拟合后对比图 (b)含误差测向值拟合后对比图 图3多项式拟合后数据与真实值之间的对比