有源噪声控制延迟LMS算法研究_刘晓东
- 格式:pdf
- 大小:362.47 KB
- 文档页数:4
交通科技与管理39技术与应用0 引言 齿轮敲击一般发生在轻载或空载条件下,由于变速器输入端扭矩波动引起的非承载齿轮啮合冲击所产生,与传动路径上各零件的配合间隙和齿轮的精度有重要关系;齿轮啸叫一般发生在加载条件下,也有少部分发生在滑行条件下,是由承载齿轮啮合过程中的传递误差所决定的[1]。
其特点是具有明显的阶次特征,与齿数等相关。
本文将以某10挡变速器优化其8挡啸叫噪声为例,详细介绍利用LMS b 对噪声时域信号进行阶次分析,确定啸叫噪声最大贡献源,从改变齿轮宏观参数着手优化变速器振动噪声。
1 阶次Order 研究齿轮啮合振动噪声,离不开阶次。
当齿轮处于运转状态时,旋转本身就是一种激励,齿轮会对其产生响应(振动和噪声)。
阶次就是相对于参考轴每转一圈,目标旋转部件啮合振动响应发生的事件次数。
阶次是齿轮系统固有属性的一种描述方式,跟外界的激励无关。
此时引入两种阶次概念,一种是旋转阶次,另一种是啮合阶次[2]。
旋转阶次是针对旋转轴来讲的,而啮合阶次是针对齿轮来讲的。
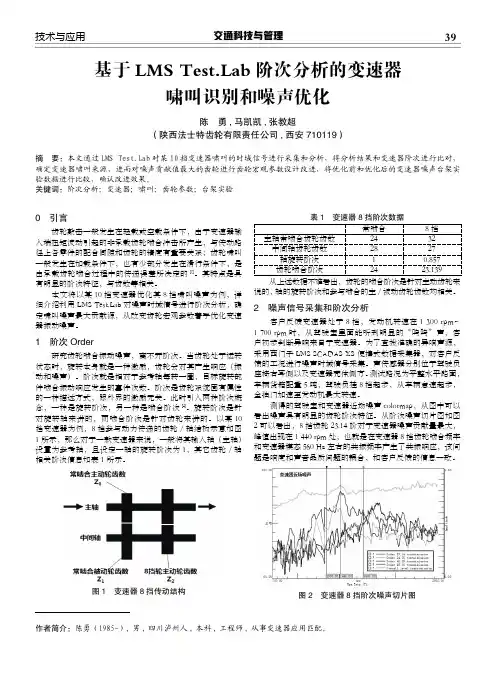
以某10挡变速器为例,8挡参与动力传递的齿轮/轴结构示意如图1所示,那么对于一款变速器来说,一般将其输入轴(主轴)设置为参考轴,且设定一轴的旋转阶次为1,其它齿轮/轴相关阶次信息如表1所示。
图1 变速器8挡传动结构表1 变速器8挡阶次数据常啮合8挡主轴常啮合齿轮齿数2432中间轴齿轮齿数2827轴旋转阶次10.857齿轮啮合阶次2423.139 从上述数据不难看出,齿轮的啮合阶次是针对主动齿轮来说的,轴的旋转阶次和参与啮合的主/被动齿轮齿数均相关。
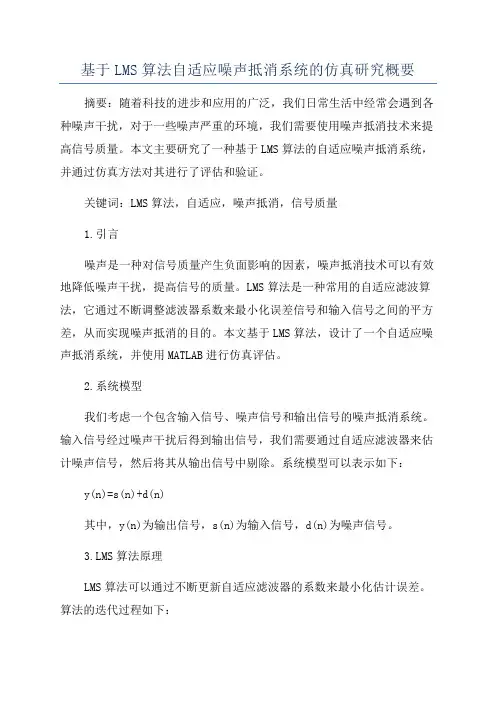
2 噪声信号采集和阶次分析 客户反馈变速器处于8挡,发动机转速在1 300 rpm~1 700 rpm 时,从驾驶室里面能听到明显的“呜呜”声,客户初步判断异响来自于变速器。
为了查找准确的异响声源,采用西门子LMS SCADAS XS 便携式数据采集器,对客户反馈的工况进行噪声时域信号采集。
声传感器分别位于驾驶员座椅右耳侧以及变速器壳体侧方。
基于LMS算法自适应噪声抵消系统的仿真研究概要摘要:随着科技的进步和应用的广泛,我们日常生活中经常会遇到各种噪声干扰,对于一些噪声严重的环境,我们需要使用噪声抵消技术来提高信号质量。
本文主要研究了一种基于LMS算法的自适应噪声抵消系统,并通过仿真方法对其进行了评估和验证。
关键词:LMS算法,自适应,噪声抵消,信号质量1.引言噪声是一种对信号质量产生负面影响的因素,噪声抵消技术可以有效地降低噪声干扰,提高信号的质量。
LMS算法是一种常用的自适应滤波算法,它通过不断调整滤波器系数来最小化误差信号和输入信号之间的平方差,从而实现噪声抵消的目的。
本文基于LMS算法,设计了一个自适应噪声抵消系统,并使用MATLAB进行仿真评估。
2.系统模型我们考虑一个包含输入信号、噪声信号和输出信号的噪声抵消系统。
输入信号经过噪声干扰后得到输出信号,我们需要通过自适应滤波器来估计噪声信号,然后将其从输出信号中剔除。
系统模型可以表示如下:y(n)=s(n)+d(n)其中,y(n)为输出信号,s(n)为输入信号,d(n)为噪声信号。
3.LMS算法原理LMS算法可以通过不断更新自适应滤波器的系数来最小化估计误差。
算法的迭代过程如下:-初始化自适应滤波器的系数为0。
-通过滤波器对输入信号进行滤波,得到滤波后的输出信号。
-根据输出信号和期望信号之间的误差来更新滤波器系数。
-重复上述步骤,直到收敛。
4.仿真实验我们使用MATLAB软件来进行仿真实验。
首先,我们生成一个包含噪声干扰的输入信号,并设定期望信号为输入信号本身。
然后,根据LMS算法的迭代过程,不断更新自适应滤波器的系数。
最后,比较输出信号和期望信号之间的误差,评估噪声抵消系统的性能。
5.仿真结果分析通过比较输出信号和期望信号的误差,我们可以评估系统的性能。
通过调整LMS算法的参数,如步长和滤波器长度等,我们可以进一步优化系统的性能。
在本文的仿真实验中,我们发现当步长设置为0.01,滤波器长度为100时,系统的性能最佳。
基于LMS Virtual Lab计算的吸声与阻尼材料应用李同勇 3M中国有限公司摘要:混响室法的隔声量测试是声学重要的测试方法和标准流程,但是周期长成本高。
仿真的方法由于速度快成本低得到越来越广泛的应用,本文基于LMS Virtual Lab Acoustic隔声量的计算,进行了吸声与阻尼材料的分析与应用。
关键字:隔声量吸声阻尼0引言3M是一家专注于的材料开发与应用的公司,在NVH控制方面的材料主要有新雪丽吸音棉和环保的阻尼材料,广泛用在汽车,航空,地铁和家电行业。
在材料的推广应用中,LMS Virtual Lab Acoustic是很实用的分析工具,下面借助于某款交通工具地板的隔音量的计算展示LMS Virtual Lab Acoustic的应用。
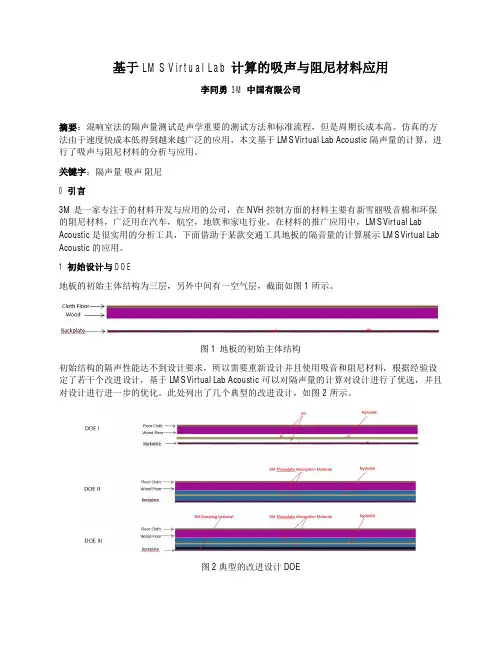
1初始设计与DOE地板的初始主体结构为三层,另外中间有一空气层,截面如图 1所示。
图 1地板的初始主体结构初始结构的隔声性能达不到设计要求,所以需要重新设计并且使用吸音和阻尼材料,根据经验设定了若干个改进设计,基于LMS Virtual Lab Acoustic可以对隔声量的计算对设计进行了优选,并且对设计进行进一步的优化。
此处列出了几个典型的改进设计,如图2所示。
图 2典型的改进设计DOE2 LMS Virtual Lab Acoustic建模与计算LMS Virtual Lab Acoustic对隔声量的计算可以仿真行业流行的混响室-消音室法,如图3所示,便于仿真与测试的拟合与比对。
图 3隔声量实验示意图2.1模型处理LMS Virtual Lab Acoustic和许多的通用软件有很好地兼容性,可以用hypermesh前处理,ANSYS进行模态分析,然后把结果导入LMS Virtual Lab Acoustic进行声场的计算。
当然,也可以在LMS Virtual Lab内部进行模态分析,然后进行声场的顺序耦合或者直接进行声固耦合的计算,这也是LMS Virtual Lab强大之处。
一种新的低旁瓣 LFM 噪声雷达波形设计方法李秀友;董云龙;张林;关键【摘要】In order to solve the issue of high range sidelobe level of LFM noise radar waveform, a new design method of low sidelobe level LFM noise radar waveform is presented, which is a combination of low sidelobes level waveform design method and LFM noise radar waveform design method. Firstly, the objective function of the low sidelobes level optimization problem is established, and the relation between the quadratic phase factor and random phase factor is used as constraint functions. Then, to solve the optimization problem with constraint functions, Modified Cycle Algorithm New (MCAN) is proposed, which can be solved by iterative algorithm. Finally, simulation results show that this algorithm can effectively suppress range-Doppler sidelobe level, and keep excellent performance in stationary targets and movement targets scenario, it also possesses low probability of intercept.%针对 LFM 噪声雷达波形旁瓣功率水平高的问题,该文将低旁瓣波形设计方法和 LFM 噪声雷达波形设计方法相结合,提出一种新的低旁瓣 LFM 噪声雷达波形设计方法。
第 36 卷第 5 期2023 年10 月振 动 工 程 学 报Journal of Vibration EngineeringVol. 36 No. 5Oct. 2023多频未知时变扰动下的结构微振动鲁棒自适应控制方昱斌1,朱晓锦2,杨龙飞1,许志超1,田梦楚1,张小兵3(1.南京理工大学智能制造学院,江苏南京 210094; 2.上海大学机电工程及自动化学院,上海 200072;3.南京理工大学能源与动力工程学院,江苏南京 210094)摘要: 本文针对多频窄带未知和时变扰动,基于内模原理和Y⁃K参数化方法,提出一种反馈鲁棒自适应振动的主动控制算法。
该算法通过设计PID中央鲁棒控制器,有效解决了次级通道模型未知情况下的鲁棒控制器参数设计问题。
同时提出一种变步长最小均方(Variable Step Size Least Mean Square,VSSLMS)方法,可以在保证稳态误差的基础上大幅提升收敛速度,并通过系统辨识实验验证了所提VSSLMS方法相较于其他VSSLMS算法在收敛性能上的优越性。
通过结构微振动主动控制实时实验,对比验证了单独采用滤波x最小均方(Least Mean Square,LMS)自适应控制算法、基于LMS算法的鲁棒自适应控制算法和基于VSSLMS算法的鲁棒自适应控制算法的抑振效果。
实验结果表明,本文基于VSSLMS算法的鲁棒自适应控制算法在面向双频正弦窄带扰动以及其频谱、幅值突变情况时,都具有较好的收敛性和鲁棒性。
关键词:振动主动控制;Y⁃K参数化;变步长(VSS); LMS算法;鲁棒自适应中图分类号: TB535;O327 文献标志码: A 文章编号: 1004-4523(2023)05-1309-09DOI:10.16385/ki.issn.1004-4523.2023.05.015引言在高分遥感探测领域中,卫星结构微振动会引发空间相机产生视线抖动和像移,继而降低成像质量和分辨率,其影响不能忽视[1⁃2]。
变步长LMS算法及在数字预失真中的应用云涛【摘要】为了解决共址平台上多条无线电链路之间的相互干扰问题,结合设备降功耗、重量和体积需求,使用数字预失真技术改善功放的带外非线性,降低对共址滤波器的抑制度要求,同时提升功放效率,简化散热设计.归一化LMS的收敛速度比LMS 有了较大提升,但调整步长时仅考虑了输入信号,没有利用误差信号提供的信息,因此提出一种自适应变步长的LMS算法.该算法利用输入信号和误差信号提供的信息,实时调整迭代步长.实验表明,在相近的收敛时间下,稳态性能提升了5 dB.【期刊名称】《通信技术》【年(卷),期】2018(051)011【总页数】5页(P2753-2757)【关键词】自适应变步长;随机梯度下降算法;数字预失真;广义记忆多项式【作者】云涛【作者单位】中国电子科技集团公司第十研究所,四川成都 610000【正文语种】中文【中图分类】TN9190 引言业界对功放行为模型进行了大量研究,提出了许多简单高效的预失真模型,如Wiener[1]、Hammerstein[2]、GMP[3]和DVR[4]模型等,并在民用通信领域取得了极大成功,但是研究预失真参数提取的文献相对较少。
文献[5]指出用一组样条基函数来代替多项式函数,不仅可增强模型拟合能力,而且提高了参数求解的稳定性;文献[6]指出通过线性插值和外推可减少待求参数个数,以降低参数求解的资源开销;文献[7]指出通过频率选择性压缩采样可降低计算量。
以上文献介绍的参数提取方法大多基于数据块,不利于FPGA实时处理,收敛时间在秒量级。
文献[8]提出利用LMS算法求解预失真参数。
LMS算法要求不同时刻的输入信号向量线性无关。
不满足该条件时,LMS算法的收敛速率将会变慢、跟踪性能变差。
对预失真参数快速提取问题,本文提出了一种自适应变步长的随机梯度下降算法(ALMS)。
该方法利用参考信号和误差信号的指数加权移动平均(EWMA),自适应调整迭代步长,提高了收敛速率,同时降低了稳态波动。
管路脉动噪声前馈主动控制算法优化
黄程;徐荣武;程果;余文晶
【期刊名称】《舰船科学技术》
【年(卷),期】2024(46)2
【摘要】噪声主动控制技术通过传感器采集噪声源信号作为输入,自适应算法输出信号驱动作动器抵消原有噪声,控制效果很大程度上取决于控制算法的性能。
目前对于液体管路脉动主动控制的相关研究较少,需设计一种适用液体管路脉动噪声主动控制的算法。
对传统宽带前馈FxLMS算法原理进行分析,针对管路脉动噪声低频线谱特征,设计线谱频率追踪算法进行峰值频率提取控制;对于作动器对参考信号造成的耦合干扰,设计声反馈补偿算法消除。
设计试验将传统算法和优化后算法的脉动衰减效果进行对比,结果表明优化算法对不同频率的脉动线谱都具有衰减效果,相比宽带前馈算法提升约2 dB的脉动衰减量。
【总页数】7页(P35-41)
【作者】黄程;徐荣武;程果;余文晶
【作者单位】海军工程大学振动与噪声研究所;船舶振动噪声重点实验室
【正文语种】中文
【中图分类】U662.2
【相关文献】
1.多智能体的振动噪声前馈主动控制技术
2.基于FxLMS定收敛因子的自适应前馈主动噪声控制
3.液压管路脉动主动控制的消振阀的设计
4.基于Fu-LMS算法的前馈式噪声主动控制系统研究
5.伤口愈合的相关营养因素及护理
因版权原因,仅展示原文概要,查看原文内容请购买。
第 36 卷第 4 期2023 年8 月振 动 工 程 学 报Journal of Vibration EngineeringVol. 36 No. 4Aug. 2023轮胎中低频噪声的降噪结构设计及性能分析刘晓昂1,2,焦湘和1,2,张曲3,甄冬1,上官文斌4(1.河北工业大学机械工程学院,天津 300130; 2.河北工业大学天津市新能源汽车动力传动与安全技术重点实验室,天津 300130; 3.宁波拓普集团股份有限公司,浙江宁波 315800;4.华南理工大学机械与汽车工程学院,广东广州 510641)摘要: 针对轮胎中低频(500~2000 Hz)噪声的吸收问题,设计了一种组合吸声结构,该结构由多孔材料和卷绕空腔结构组成。
结合多孔材料和卷绕空腔的吸声原理,建立了组合式吸声结构的理论分析模型,推导了模型吸声系数表达式;利用有限元分析法,分析了组合式吸声结构在中低频频段内的吸声性能。
结果表明,组合吸声结构在500~ 2000 Hz频段内吸声性能良好,在1092 Hz频率附近出现吸声峰值,接近完美吸声。
相较于单一的多孔材料,该组合式吸声结构的吸声性能有了较大的提升;通过改变组合式吸声结构中多孔材料体积占比,研究了吸声性能的变化规律,通过绘制反射系数的复频率平面分布情况,并结合声阻抗匹配条件分析了结构的吸声机理;在阻抗管中对该组合式吸声结构进行吸声测试,验证了理论解析模型和有限元模型的正确性。
将组合吸声结构与毛毡轮罩材料叠加,研究了叠加后的吸声性能,并提出了进一步提升吸声性能的措施。
该组合吸声结构的吸声峰值频率可根据多孔材料体积占比调控,且总体厚度小,在轮胎中低频噪声控制中具有一定的效果。
关键词: 轮胎噪声;多孔材料;卷绕空腔;组合吸声结构;吸声系数中图分类号: TB535; TB533.2 文献标志码: A 文章编号: 1004-4523(2023)04-1005-10DOI:10.16385/ki.issn.1004-4523.2023.04.014引言目前,传统燃油车逐渐被电动汽车代替,在电动汽车噪声成分中,轮胎空腔低频噪声[1](300 Hz以下)、轮胎道路中低频噪声(500~2000 Hz)成为主要的噪声源。