中文翻译--机器人的模型和码垛机机器人使用Workspace的仿真模拟
- 格式:doc
- 大小:579.00 KB
- 文档页数:12

基于RobotStudio的机器人搬运码垛虚拟仿真平台
邓华军;段月红;卢培文
【期刊名称】《自动化与信息工程》
【年(卷),期】2023(44)1
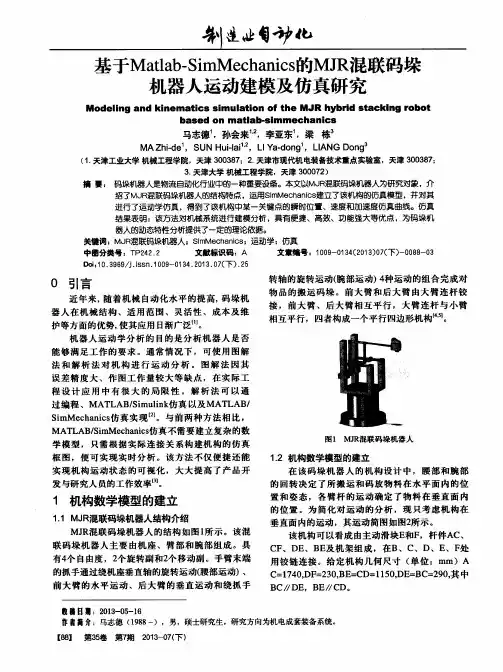
【摘要】以机器人搬运码垛平台为研究对象,通过SolidWorks软件建立该平台的三维模型;利用RobotStudio软件设计动态物料输送链、动态快换工具和动态真空吸盘3个Smart组件,分别用于模拟机器人搬运码垛平台的物料运动、吸取/释放物料和装载/卸载吸盘,并虚拟仿真机器人搬运码垛的工作过程。
仿真结果表明:该虚拟仿真平台可以准确地模拟机器人搬运码垛平台的动态效果,顺利地完成预定的工作程序,达到与真实平台相同的搬运码垛效果。
【总页数】6页(P27-32)
【作者】邓华军;段月红;卢培文
【作者单位】赣州职业技术学院
【正文语种】中文
【中图分类】TP249
【相关文献】
1.基于RobotStudio的机器人码垛工作站虚拟仿真设计
2.基于RobotStudio的机器人码垛工作站虚拟仿真设计研究
3.基于RobotStudio的搬运码垛工作站仿真设计
4.基于RobotStudio的工业机器人虚拟仿真实验平台设计及实现
5.基于RobotStudio的码垛机器人工作站仿真设计
因版权原因,仅展示原文概要,查看原文内容请购买。
(封面)XXXXXXX学院产品码垛作业工业机器人离线编程与虚拟仿真题目:院(系):专业班级:学生姓名:指导老师:时间:年月日1拆垛机器人工作站构成自动化物流系统中,与码垛应用相对应的为拆跺应用,即把成垛的产品依次搬运至流水线上,例如烟草物流系统中出人智能仓库时的码垛拆垛、袋装原材料拆垛并开袋、汽车零部件的拆垛上料等应用。
本工作站为箱类产品拆垛应用,成垛的原料摆放在枝板上,随枝板流动至枝板输送链拆垛工位处,利用ABB公司的IRB6700机器人将产品从枝板上搬运至产品输送链上,以便流至下工位进行处理,如图6一l所示。
I )枝板输送链载有产品的枝板经由左侧的进料输送链流转至末端拆垛工位,并且对未端设有至lj位检测传感器,当机器人完成该校板的拆垛任务后,空枝板经由右侧输出线传至下一士位,便于空枝板的回收,之后进料输送链传送下一个载有产品的枝板,依次循环2)吸盘工具机器人末端法兰盘装有吸盘工具(图6-3),利用真空发生器产生真空,对产品进行拾取处理,机器人利用输出信号控制真空的产生与关闭,从而实现产品盒的拾取与释放,该工具采用16个吸盘,气路分为4蹈,利用机器人4路数字输出端口分别进行控制,3 )产品输送链I机器人将拆垛产品按照指定的方式放置在产品输送链前端,经由该输送链传送至下工位;在该输送链前端设有传感器,用于枪测当前位置是否有物料,当没有物料时才允许机器人执行下一个物料的放置,如图6-5所示。
2、信号组的设置与用法3、数组的应用在定义程序数据时,可以将同种类型、同种用途的数值存放在同一个数据中,当调用该数据时需要写明索引号来指定我们调用的是该数据中的哪个数值,这就是所谓的数组。
在RAPID申可以定义维数组、二维数组以及三维数组。
4、写屏指令的运用在编写例行程序时,将该程序中的某些数据设置为参数,这样在调用该程序时输入不同的参数数据,贝lj可对应执行在当前数据值情况下机器人对应执行的任务。
例如,在切割应用中,频繁使用切割正方形的程序,切割正方形的指令及算法是致的,只是正方形的顶点位置、边长不一致,这样可以将这两个变量设为参数。
基于RobotStudio的机器人码垛工作站虚拟仿真设计摘要:本文介绍了基于RobotStudio的机器人码垛工作站虚拟仿真设计。
该设计主要应用于工厂生产线上的码垛工作,以提高生产效率和产品质量为目标,实现了自动换盒和错误检测的功能。
通过虚拟仿真,可以降低实际建设成本,同时保证设计方案的效果。
本文详细阐述了机器人码垛工作站的整体设计思路、工作流程、仿真模拟结果以及未来的拓展方向。
关键词:RobotStudio;机器人;码垛;自动换盒;错误检测正文:一、研究背景传统的码垛工作需要人工操作,效率低、出错率高,不仅成本高昂,还容易由于操作员的疏忽而造成生产线的瘫痪。
为了提高生产效率和产品质量,采用自动化技术已成为必然趋势。
RobotStudio是ABB公司推出的工业机器人虚拟仿真软件,可以帮助用户预测机器人的运动轨迹,分析生产线的效率和可靠性,降低实际建设成本。
二、设计思路本文设计了一个基于RobotStudio的机器人码垛工作站,其主要包括两个部分:一个是码垛机器人,另一个是物料输送机。
具体的设计思路如下:(1)整体结构设计机器人码垛工作站的整体结构如图1所示,由物料输送机、机器人、工作平台和控制系统组成。
图中的机器人代表一个ABB IRB 4600-45/2.05工业机器人,用于实现对物料进行抓取、码垛和放置等操作。
(2)工作流程设计机器人的工作流程如图3所示,包括三个主要步骤:物料入料、码垛和放盘。
其中,自动换盒和错误检测功能能够保证生产的连续性和稳定性。
(3)错误检测设计为了避免机器人在码垛过程中出现错误,本文设计了一个错误检测系统。
在机器人操作前,摄像头会检测物料的旋转角度和朝向,并通过计算器来判断是否需要调整物料放置的位置和角度。
如果物料在码垛过程中出现了异常,机器人会停止工作并报警。
在这种情况下,人工干预是必要的,例如清理堵塞或重新调整机器输送机的部分。
三、仿真模拟结果利用RobotStudio进行虚拟仿真可以模拟整个机器人码垛工作站的生产流程。
基于 RobotStudio 的机器人码垛工作站虚拟仿真设计研究引言随着工业自动化的不断发展,机器人在生产场景中扮演着越来越重要的角色。
机器人码垛是一项常见的自动化任务,它可以以高效的方式将物品堆叠在一起,节省人力和时间。
在设计码垛工作站时,虚拟仿真是一种十分有效的工具。
本文将探讨基于 RobotStudio 的机器人码垛工作站虚拟仿真设计的研究。
1. RobotStudio 简介RobotStudio 是由全球领先的自动化公司 ABB 开发的一款专业机器人仿真软件。
它提供了一个功能强大的平台,用于设计、优化和验证机器人自动化任务。
RobotStudio 能够模拟真实的生产环境,并能够将其连接到实际的机器人控制系统,实现实时的虚拟仿真。
2. 机器人码垛工作站的设计机器人码垛工作站的设计过程中需要考虑多个方面,包括工作站布局、机器人路径规划、物品堆放策略等。
虚拟仿真可以为设计师提供一个可视化的环境,使其可以在不实际布置物理设备的情况下进行工作站的设计和优化。
使用RobotStudio 进行机器人码垛工作站设计的步骤如下:2.1 创建工作站模型首先,需要在 RobotStudio 中创建一个工作站模型。
这可以通过导入现有的 CAD 文件或者从头开始构建。
工作站模型应包括机器人、物料传送带、码垛区域等。
2.2 添加机器人任务在工作站模型中添加机器人任务,包括从传送带上取货、运输到码垛区域、将物品码垛等。
2.3 设计机器人路径使用 RobotStudio 的路径规划工具,设计机器人在工作站中的路径。
路径应尽可能高效,以最短的时间完成任务。
2.4 优化工作站布局通过不断调整工作站模型和机器人路径,优化工作站布局以提高生产效率。
可以使用 RobotStudio 的仿真功能模拟机器人的运动,以评估不同布局的效果。
2.5 编写控制程序完成工作站的设计后,可以使用 RobotStudio 的控制程序编辑功能编写机器人的控制程序。
目录一、设计背景与意义 (1)二、计放案的论证与确定 (1)(一)设计要求分析 (1)(二)设计放案确定 (1)三、设计过程 (2)(一)设计原理 (2)(二)机器人的选型与3D模拟设计 (3)(三)工作站的布局 (4)(四)信号连接 (6)(五)程序设计 (13)四、工作站运行与调试 (18)(一)工作站运行效果 (18)(二)系统制作过程中出现的问题及解决方法 (19)五、设计总结 (20)六、参考文献 (21)乡镇食料加工厂码垛机器人工作站仿真设计一、设计背景与意义背景:自机器人技术兴起以来,为满足日益旺盛的自动化生产需求,工业领域率先开启了对机器人的大范围应用,并用极短的时间实现了规模化的发展。
时至今日,机器人产业不仅被称为“制造业皇冠顶端的明珠”,还被看作是国家创新力和产业竞争力的重要表现。
作为全球新一轮科技和产业革命的切入点,机器人产业的发展同样受到我国的大肆青睐,从上世纪70年代起步开始,我国政府就对产业行业给予了高度的重视和支持。
近年来,国家又相继发布了《“十三五”规划纲要》、《机器人产业发展规划(2016-2020年)》、《关于促进机器人产业健康发展通知》等系列文件,为国内机器人产业发展做出积极战略部署和引导,监督并推动着产业发展逐步走向成熟。
意义:工业机器人能替代目前越来越昂贵的劳动力,同时能提升工作效率和产品品质。
可以长期工作,可以工作于有毒有害的场合,机器人具有执行各种任务特别是高危任务的能力,平均故障间隔期达60000小时以上。
总的来说,通过我设计的食料码垛机器人工作站,能为家乡食料加工降低生产成本,提高生产效率,早日实现自动化智能化的生产。
二、计放案的论证与确定(一)设计要求分析设计要求:1.设计出抓取食料的工具模型、食料输送链模型等;2.根据家乡食料加工厂设计符合实际生产任务的码垛机器人工作站;3.使用RobotStudio 软件使用工作站实现自动输送食料、领料自动搬运码垛的仿真效果。
人工智能机器人的仿真模拟与实际运用随着科技的不断发展,人工智能机器人已经成为现实中的一部分,其在各个领域的广泛应用已经引起了人们的关注和讨论。
在机器人科学领域,人工智能技术的不断进步使得机器人能够进行更为复杂的任务,并在各种环境中进行仿真模拟和实际应用。
本文将介绍人工智能机器人的仿真模拟与实际运用,并探讨其在未来的发展前景。
首先,人工智能机器人的仿真模拟是一种对机器人进行模拟和测试的方法。
通过使用仿真软件,可以在计算机上建立虚拟的机器人模型,并模拟不同的场景和情境,以评估机器人的性能和可行性。
在仿真模拟中,机器人可以进行各种任务,如导航、物体识别和操作等。
通过仿真模拟,可以在较低的成本下进行机器人的开发和测试,并对机器人的设计和算法进行优化。
仿真模拟的一个重要应用是在机器人足球比赛中。
机器人足球比赛是一个国际性的竞赛活动,旨在通过人工智能技术的应用,培养机器人团队之间的合作和竞争能力。
在仿真模拟中,机器人可以模拟真实的足球场景,并进行各种球技动作,如传球、射门和防守等。
通过模拟比赛,可以评估机器人团队的策略和技术,并提供参赛团队之间的对抗平台。
这种仿真模拟的方式可以为实际足球比赛提供指导和训练,为机器人研究和发展提供重要的参考。
另外一个重要的实际运用领域是医疗机器人。
随着人口老龄化的加剧,医疗服务的需求日益增加。
人工智能机器人在医疗领域的应用已经开始取得了一些进展。
通过搭载人工智能技术,机器人可以在手术和治疗过程中提供帮助和支持。
例如,在手术中,机器人可以辅助医生进行精细的操作,减少手术风险和时间,提高手术成功率。
同时,机器人还可以通过监测、检测和记录病情的变化,为医生提供及时的诊断和治疗建议。
通过机器人的应用,可以实现医疗资源的合理分配,提高医疗服务的效率和质量。
此外,人工智能机器人还广泛应用于工业生产和物流领域。
在工业生产中,机器人可以替代人工完成重复性和危险性高的任务,提高生产效率和质量。
基于RobotStudio的机器人码垛工作站虚拟仿真设计郝建豹;许焕彬;林炯南【摘要】介绍一种利用SolidWorks和RobotStudio构建机器人码垛工作站的虚拟仿真方案.首先,利用SolidWorks设计传送带等工作站的三维仿真模型,分析构建码垛工作站的基本流程;其次,创建仿真运行I/O信号和动态Smart组件;最后,离线编制了机器人码垛仿真程序.仿真结果表明,该虚拟码垛工作站可实现码垛作业.【期刊名称】《自动化与信息工程》【年(卷),期】2017(038)002【总页数】4页(P26-29)【关键词】SolidWorks;RobotStudio;码垛工作站;虚拟仿真【作者】郝建豹;许焕彬;林炯南【作者单位】广东交通职业技术学院机电工程系;广东交通职业技术学院机电工程系;广东交通职业技术学院机电工程系【正文语种】中文工业机器人作为现代工业的三大支柱之一,广泛应用于食品、化工、医药包装等行业。
码垛机器人作为包装线的后续设备,将包装袋按照预定的编组方式、逐个逐层码放在托盘或箱体内,能极大地提高生产能力和转运能力。
随着物流自动化技术领域的扩大,码垛机器人应用场合也逐渐在扩大[1]。
当前,应用于生产的机器人系统大多采用示教再现编程方式,而示教再现编程在实际生产应用中存在精度靠目测、效率低等问题[2-4]。
为提高编程效率,使编程者远离危险的工作环境,改善编程环境,可采用机器人虚拟离线编程[5]。
其基本思想是利用离线仿真技术,构造虚拟机器人及其工作环境;在虚拟模型中引入机器人和场景,同时操作者能够操纵机器人在场景中移动,可以选择不同的观察角度,从不同的侧面观察机器人的运动情况;可以在计算机屏幕上引导虚拟机器人末端执行器运动,进行虚拟在线示教,产生机器人作业轨迹,由此生成机器人语言程序,将编辑好的程序保存在PC机上,并传送给机器人控制器。
本文以六自由度关节型机器人IRB120为研究对象,运用SolidWorks软件建立码垛工作站的三维实体模型,导入RobotStudio中,并进行仿真,为机器人编程和调试提供安全灵活的环境,提高编程效率,指导现场生产,在一定程度上提高了现场操作人员的安全性,减轻了现场调试的工作量。
0 引言随着科技的进步以及现代化进程的加快,机器人码垛已经逐渐取代人工码垛和搬运。
工业机器人码垛是工作人员的手足与大脑功能延伸和扩展,它可以代替人们在危险、有毒、低温、高热等恶劣环境中工作;帮助人们完成繁重、单调、重复的劳动,提高劳动生产率,保证产品质量。
简言之:工作能力强、适用范围大、占地空间小、灵活性高、成本低以及维护方便等多个方面的优势使机器人码垛应用渐为广泛,并成为一种发展趋势。
RobotArt 工业机器人离线编程软件是北京华航唯实机器人科技股份有限公司推出的工业机器人离线编程仿真软件,其利用成熟的CAD/CAM 技术,结合工业机器人离线编程技术,通过对机器人进行运动轨迹规划、轨迹仿真、路径优化、后置代码等一系列操作生成机器人离线编程系统,同时集碰撞检测、场景渲染、动画输出于一体,可快速生成效果逼真的模拟动画,提高机器人编程效率,从而实现提升系统的制造柔性、提高生产效率和产品质量,被广泛应用于打磨、去毛刺、焊接、激光切割、数控加工等领域。
本文以机器人码垛为例,从机器人选型、场景搭建、离线仿真、仿真后置验证等方面,详细论述了基于RobotArt 的ABB机器人离线仿真的具体步骤与方法,验证了使用机器人进行码垛的可行性,为生产现场的实际应用提高了理论依据。
1 ABB 机器人码垛工作站设计RobotArt 生成工艺的流程可分为以下六个步骤:场景搭建、校准工具、校准工件、生成轨迹、仿真和后置。
1.1 场景搭建完成一个完整的工艺需要机器人、工具、零件和工作台。
在正式规划机器人运动路径之前,需要先进行场景搭建。
所谓的场景搭建就是导入模型,在真实环境中有机器人,加工的零件,工具等,在RobotArt 中需要的就是相应模型。
RobotArt 支持多种格式的文件导入到模拟环境中。
用户可直接导入相应模型,也可直接加载机器人库、工具库和设备库等云端在线资源。
在软件界面菜单栏中【机器人编程】下的【场景搭建】中导入机器人IRB1410、码垛工具、码垛零件以及外围设备,搭建机器人码垛工作站。
基于RobotStudio的码垛机器人智能工作站仿真的探究李勇摘要:在一些工业领域当中,为了能够良好地将货物存放或者放置到指定位置堆叠,需要进行码垛,然而传统码垛工作主要由人工执行,那么随着货物重量、搬运要求的增长与变化,人工因为自身能力所限,无法满足码垛需求,此时为了能够良好地进行码垛工作,就需要采用码垛机器人来进行作业。
本文主要在RobotStudio基础上,对码垛机器人以及智能工作站进行分析。
关键词:RobotStudio 码垛机器人智能工作站TP24 :A :1672-3791(2018)10(a)-0031-02码垛机器人的运作是受到智能工作站的管制,管制决策由人工根据机器人运行的状态来决策,但是在决策之前,相关人员往往会借助仿真软件,对码垛机器人的运行生产线各阶段进行仿真,再根据仿真结果来分析码垛机器人运行是否存在潜在问题,此举能够有效提高码垛机器人的工作效率,并且降低开发成本,因此有必要在使用码垛机器人之前进行相关的仿真研究。
1 智能化生产线模型构建本研究将以PLC作为控制核心,之后进行码垛机器人选型,主要选择ABB-IRB2600型号机器人,其工作有效范围为1.65m,承重载荷达12kg[1]。
ABB-IRB2600型号机器人结构简单,其工作端安置了真空吸盘,吸盘可以吸住周转箱,保障码垛过程中货物的安全[2]。
2 传输链Smart组件添加与连接2.1 Smart组件概述Smart组件是RobotStudio的一种仿真功能,专门用于仿真模拟ABB型号机器人,因此在本研究基础上具有良好的应用价值[3]。
在本文中,通过Smart组件实现了货物在传输链当中的动态模拟。
2.2 传输链Smart组件添加首先添加源组件(Sourse)来实现货物的复制,同时结合队列(Queue)来执行货物复制命令,在此两项运作之下,使得所有货物都具备了相同的动态属性。
其次,通过线性运动组件(Linear-Mover)对货物与机器人传感器接触进行控制,即当货物运行到传输链末端之后,货物会与传感器相互接触,此时传感器会发出相应的信号,此部分传感器为面传感器(Plane Sensor)。
基于ABB机器人的码垛工作站仿真研究作者:马再敏韩渴望来源:《现代信息科技》2020年第16期摘要:在RobotStudio仿真软件中对末端机械爪、托盘、物料、输送链等进行建模,完成虚拟工作场景空间布局并创建码垛工作站。
进行外围设备的Smart组件设计和信号连接,并与机器人本体建立通讯和控制关联。
在离线环境下,操作虚拟示教器示教基准点后采用偏移算法规划路径点,完成智能码垛Rapid程序编写和工作过程模拟仿真。
研究结果表明:机器人工作站能成功实现物料码垛任务过程,仿真过程中生成的机器人程序经过坐标变换后可以同步到实物机器人中进行实际运行。
关键词:ABB机器人;码垛工作站;虚拟仿真;Smart组件;I/O信号连接中图分类号:TP24 文献标识码:A 文章编号:2096-4706(2020)16-0145-04Simulation Research on Palletizing Workstation Based on ABB RobotMA Zaimin,HAN Kewang(Changzhou Technician College of Jiangsu Province,Changzhou 213032,China)Abstract:In RobotStudio simulation software,model the end manipulator claws,pallets,materials,conveyor chains,etc.,complete the virtual work scene spatial layout and create a palletizing workstation. Carry out Smart component design and signal connection of peripheral equipment,and establish communication and control association with the robot body. In the offline environment,after operating the virtual teach pendant to teach the reference point,the offset algorithm is used to plan the path points,and the intelligent palletizing Rapid program is written and the work process simulation is completed. The research results show that the robot workstation can successfully realize the material palletizing task process,and the robot program generated in the simulation process can be synchronized to the physical robot for actual operation after coordinate transformation.Keywords:ABB robot;palletizing workstation;virtual simulation;Smart component;I/O signal connection0 引言目前,工业机器人在焊接、喷涂、码垛、打磨等行业的应用已经十分普遍,取得的经济效益也非常明显。
毕业设计外文资料翻译设计题目: 面粉袋码垛机设计译文题目:Robotic modeling and simulation ofpalletizer robot using Workspace5学生姓名:学号:专业班级:指导教师:正文:外文资料译文附件:外文资料原文Nory Afzan Mohd Johari, Habibollah Haron, Abdul Syukor Mohamad JayaDepartment of Modeling and Industrial ComputingFaculty of Computer Science & Information Systems,Universiti T eknologi Malaysia, 81310 UTM Skudai, Johor, Malaysiaafzanijan@, habib@utm.my,syukor_2781@ 机器人模型和使用Workspace5码垛机机器人的仿真模拟内容摘要机器人在制造业的使用在制造工业中已经是一个增值的实体。
机器人仿真被用来使全部的机器人应用系统形象化,模拟机器臂的运动,机器臂和零部件合并在它的环境中组成,并且也用来检测机器人和组成部件之间的碰撞。
这份报告呈现了执行一个电脑根据模型来模拟OkuraA1600码垛机器人工程的结果。
这种应用使用OkuraA1600机器人在生产线的最后码垛袋子,集中在做拿起和放下袋子的应用。
这个工程的目标是产生一个电脑仿真的模型来表现实际的机器人模型和它的环境。
这个工程模拟了机器人的最初四个关节,即腰﹑肩﹑手肘和手腕,并且集中在机器人最后控制字符的位置,不管它的定位怎样。
模型的发展是使用Workspace5作为一种仿真工具。
使用了两种方法论,这两种方法论分别是发展机器人工作单元仿真模型的方法论和执行机器人仿真的方法论。
工程的输出将是一个机器臂运动的三维视角,这种机器臂的移动是基于一系列的先前定义的几何点,安排布局的校验和机器人的通过产生工作壳层,碰撞和有惊无险检测和在一个循环周期完成一个任务能到达性。
这个工程是一种脱机的程序设计,并且没有产生机器人语言。
关键词:机器人的模型;仿真模拟;机器人辅助设计;Workspace51,介绍机器人在制造业的使用已经成为使公司有竞争力的优势的一个增值的实体,Zomaya描述了工业将机器人的一些特征,机器人在工业上的使用减少了劳动力的费用,增加了灵活性和多样性,更高的精度与生产率,更好的工人工作环境,并且取代了人在危险和不切实际的环境的工作。
Farrington et al.[2]陈述了机器人的仿真是不同于传统的就一些特征和能量而言以五种方式不连续的事件仿真(DES)机器人的仿真包括了机器人如何通过它的装置移动。
基本地,模拟仿真在很大程度上是根据CAD 和绘图的可视化工具。
另一种仿真类型是数字化的仿真,处理动力,感觉,和机器人的控制。
仿真的主要收益是投资和设计证明系统时间的减少已经被接受。
机器人仿真是动力学的仿真工具,这种动力学仿真工具起初使用是作为一种高地细节,单元水平的验证工具(Farrington et al.),并且是为了模拟一个系统,这个系统的状态连续的改变是根据一个或多个动力学装置的移动(Roth[4])。
它也是一个核实机器人的工作单元进程经营的工具,这种运营通过提供机器人应用系统的模拟状态,为了检测和评估不同的参量,例如倍周期,物体的碰撞,最佳途径,工作单元的布局和工作单元中实体在相互之间的安置。
这份报告呈现了怎样生产一种基于机器人码垛机系统模型的电脑系统,这种机器人码垛机系统模型是通过模拟仿真来监督和评估全部的机器人应用系统。
这种模拟仿真集中于机器人的最初四个关节,即腰﹑肩﹑手肘和手腕。
这份报告被分为五个部分。
第二部分写的是当前的机器人应用系统。
第三部分讨论了机器人工作单元的房展和仿真的方法论。
还有一些模拟仿真和结果在第四部分呈现,第五部分写的是结论。
2,机器人和机器人码垛机系统这一部分呈现了机器人和它当前系统的应用系统。
这种应用使用Okura A1600机器人来在生产线的最后堆垛袋子,并且集中在拿起和放下的应用。
机器人将在夹持位置拿起袋子放在托盘上。
机器人模型是多节的四轴气动的 Okura A1600 码垛机。
它拥有机器人中最快的循环时间,达到每小时1600转,还有高的可靠性和低的维护需要。
机器人能够拿起的重量达到140kg。
机器人也有高的精度,1mm可重复的位置精度。
机器人包含一些组成部件,即底座、旋转体/环节1,低级/环节2,上臂/环节3,连杆/环节4,凸缘/环节5,发动机轴1和发动机轴2.机器人的位置是根据它的手臂协调系统,手臂的协调一致运用基于三个轴(X,Y和Z)的三维坐标系统。
机器人堆垛系统包括Okura A1600机器人码垛机,运输袋子和托盘的输送机系统,托盘分配者,给机器人的工作单元提供界限的防守系统和监督和控制人机界面接口的控制托盘系统。
机器人的工作单元如图1所示。
图1 Okura A1600机器人码垛机系统码垛过程是按照一个标准的移动模型的,包含七个步骤,表示了机器臂从拿起状态到托盘再到拿起状态的移动路径。
移动样板如图2所示图2 移动样板每个托盘包括十层,在每一层有五个袋子。
袋子根据特殊的袋子安排安置。
袋子的布置如图3所示图3 袋子的布置3,方法论这一部分提出了Workspace5作为一种仿真工具和发展模型与仿真的执行的方法论。
Workspace5是以个人计算机为基础的支持三维可视化的机器人仿真软件。
Workspace5是碰撞和附近遗漏的检测,与ACIS地理学的核心作为自动计算机辅助设计相似的CAD功能,达到计算机安置最佳化的检测,和脱机程序编程。
其中应用了两种类型的方法论,Cheng[5]的发展机器人仿真模型的方法论和Grajo et al.[6]的机器人仿真的方法论。
Cheng[5]的方法论如图4所示,Grajo et al.[6]的方法论如图5所示。
图4 Cheng[5]的发展机器人仿真模型的方法论图5 Grajo et al.[6]的机器人仿真的方法论3.1发展机器人工作单元仿真模型的方法论机器人的工作单元仿真是“一种基于模型的问题解决方案,目的是为机器人的系统设计生产足够的可靠地解决方案”(Cheng[5]).他的方法论包括六个步骤:1)创造部分模型部分模型是一个低水平或者几何学的实体。
这些部分是由使用Workspace5固体模型特征的基本元素创造的。
这些部分包含Okura A1600的组成部件和在它的工作单元例如输送机、托盘和夹起装置中的装置。
2)建立装置模型装置模型代表了实际工作单元组成部件,并且被分成两类;机器人的装置模型和非机器人的装置模型。
建立装置模型开始于部分模型作为基本坐标系统的位置。
Okura A1600包含五个环节:旋转体/环节1,低级/环节2,上臂/环节3,连杆/环节4,凸缘/环节5 。
这些环节是根据它的数字通过运用Workspace5的附属物特征而被附上的。
每一个附上的环节都受制约关系的影响。
3)布局中的定位装置模型工作单元模型的安排布局与代表实际工作单元的环境有关。
关于这点,协调系统的应用是Okura A1600的手臂协调系统。
模型和装置在环境中的安置是根据工作单元的实际安排布局。
4) 定义装置在布局中的移动终点装置模型的移动特征定义了装置模型的关节就home,位置,速度,加速度和运行而言的移动限制。
在Workspace5中,没一个环节都是行动诉讼程序环节的一部分。
正如在Okura A1600中,关节1是连接底座和旋转体/环节1的腰关节,关节2是连接旋转体/环节1低级/环节2的肩关节,关节3是连接低级/环节2和上臂/环节3的肘关节,关节4是连接上臂/环节3和连杆/环节4的腕关节,关节5是连接连杆/环节4和凸缘/环节5的夹关节Workspace5。
每一个关节都与它自己的动作限制。
一旦关节被定义,Workspace5将自动的定义机器人的运动。
5)设备的行为和编程在码垛过程中,装置的动作和机器臂的移动有关。
运动是通过一系列的点决定(GPs)这些带你创造了机器人要跟从的移动路径。
集合点的位置和系列是根据移动样板和袋子布局。
几何点的协调一致是通过使用Workspace5的悬挂物特征来实现的。
有三种方式创造几何点,这些方式是通过输入每一个关节的价值,输入X,Y和Z的绝对值和鼠标的点击。
关于这个工程,获得精确位置的最恰当的方式是通过输入一个几何点的X,Y和Z的绝对值。
74个几何点在发展中已经被鉴定。
6)执行工作单元仿真和分析仿真仅仅集中在机器臂的位置,不包括它的定位。
在编程之后,装置模型布局能够被在绑定时间之外模拟仿真。
模拟仿真和分析的执行是使用Workspace5的特征。
被仿真的模型能够展示机器臂的运动,布局的检测,机器人可到达性,循环时间检测和碰撞和附近遗漏检测。
3.2机器人仿真方法论这种方法论包括八个阶段但是这项工程仅仅执行到第七个阶段。
1)阶段1:定义问题问题确认是在对问题的背景地初步分析期间被定义的。
当前的系统没有基于代表机器人应用模型的电脑。
因此,不可能监督和评估机器人码垛系统的表现。
2)阶段2:设计研究研究是被限制在工程范围内的。
这一阶段需要对能够使用的工具和方法论做出恰当的决定。
而且还需要一个核实的计划和里程碑。
3)阶段3:设计概念的模型概念模型是使用机器人系统的当前应用程序。
这一阶段需要机器人工作单元发展的参量数据的收集。
这些数据包括机器人应用程序的安置,机器人的几何结构,机器人运动参数和机器人的循环时间。
4)阶段4:系统的阐述输入、假设和过程定义机器人应用程序模型集中于三个活动上,即建造机器人、码垛过程的移动路径程序和运营模拟仿真。
建造机器人的模型很在大程度上是根据Okura A1600使用Workspace5的CAD的特征的几何数据。
尺寸和Okura A1600的CAD图有关。
在决定移动路径时一些空间的数据需要被考虑在内:a)指出机器人需要拿起袋子的拿起位置。
b)代表袋子在奇数层布局的五个点c)代表袋子在偶数层布局的五个点点在x,y和z坐标轴的位置。
由于每个托盘包括十层袋子,每层放五个袋子,因此z坐标值需要十个增量值。
5)阶段5:建立、核实、确认仿真模型在这一阶段中,机器人工作单元的发展是根据Cheng[5]所提出的方法论。
这是一个相互作用的阶段,目的是提高模型的精度和动作。
模型的验证是根据系统安排的可视化和机器人完成一项任务的循环时间。
使用Workspace5产生的布局是可以和实际的系统安置相比较的。
Workspace5的系统安置如图6所示。
图6 Workspace5的系统安置在初步的数据收集过程中,真实的机器人在一天的运行中完成一项任务的现象已经有记录了。