压电型微位移驱动器
- 格式:ppt
- 大小:712.03 KB
- 文档页数:8

• 134•压电陶瓷(PZT)作为原子力显微镜(AFM)控制结构中微驱动定位的关键器件,能够用于快速跟踪测量样品表面的形貌变化,而其驱动电源是决定压电陶瓷微驱动性能的核心部分。
本文采用线性放大式驱动电源原理,设计了一种以AD8572+PA85A为核心的高精度压电陶瓷驱动电源。
主要介绍了驱动电源的工作原理、两级运放的特点和影响运放稳定性的关键因素。
实验结果表明设计的驱动电源线性度高、响应速度快、性能稳定,能有效应用于AFM的微驱动定位系统中。
引言:随着生物医学、微细加工和精密制造工艺等领域的不断发展,纳米级定位技术得到广泛关注,压电陶瓷微位移驱动平台作为理想的定位系统,它在体积、响应速度、分辨率等方面优点突出(李龙江,压电陶瓷驱动电源及其控制系统的研究:哈尔滨工业大学,2012;徐辽,基于PA85A的高精度动态压电陶瓷驱动电源设计:压电与声光,2018)。
而压电陶瓷驱动电源作为微位移驱动平台的核心部分,其线性度、电压分辨率、响应速度和稳定性都决定着AFM的扫描成像能力,所以对驱动电源输出电压的稳定性、分辨率和响应速度等性能提出了更高的要求(刘振明,压电陶瓷驱动器动态驱动电源设计:电源技术,2011)。
目前,国内外的专家学者对压电陶瓷驱动电源的研究多集中在电源的谐波失真、频响范围、输出的功率等方面(王彭,宋克非,高带宽压电陶瓷驱动电源:仪表技术与传感器,2016;钟文斌,一种误差放大式压电陶瓷驱动电源的研制:压电与声光,2014;滕旭东,高精度数字跟踪式压电陶瓷驱动电源设计:电源技术与应用,2013)。
然而面对目前仍存在的驱动电源输入失调电压高、精度不够、非线性失真大、稳定性差等影响压电陶瓷驱动电源性能的关键因素,提出行之有效的解决方案仍然是其在AFM应用中至关重要的技术之一。
1 驱动电源工作原理和技术指标压电陶瓷驱动电源分为电荷控制型和电压控制型两种(赵雅彬,一种压电陶瓷致动器直流可调稳压驱动电源设计:北方工业大学学报,2015;金学健,曹龙轩,冯志华,基于恒流源的改进型压电陶瓷高压驱动电源:压电与声光,2017)。

基于柔性铰链的桥式微位移机构特性探析ﻭﻭ全柔性机构是一种新型机构,通过采用免安装、无间隙和无摩擦的设计方式可实现微米级甚至纳米级的高精度。
为了达到精密运到的目的,全柔性机构多采用高精度的微位移驱动器。
压电陶瓷驱动器是近年来应用越来越新型微位移器件,它具有体积小、出力大、分辨率和频响高的优点,且不发热、无噪声.然而压电陶瓷驱动器的输出位移仅限制在在几微米到几十微米范围,因此全柔性机构通常要采用微位移放大机构来实现对压电陶瓷输出位移的放。
目前,常用的微位移放大机构主要有杠杆原理放大机构和桥式放大机构.ﻭ基于杠杆原理的微位移放大机构结构简单、刚性好、功效比高,理论上可以实现输入输出的线性关系,但是其一级放大倍数是有限的,复合式杠杆放大机构体积较大、放失真严重。
ﻭ而根据放大原理设计的桥式放大机构具有结构紧凑、易于加工以及具有较高的放大倍数等特点,近些年来得到了关注。
ﻭJunHyung Kim等人采用矩阵法建立了柔性链的刚度矩阵并对桥式放大机构进行了优化设计;马洪文等人采用弹性梁理论分析了微位移桥式放大机构的放等特性。
N. Lobont iu等人基于应变能原理与卡氏第二定理推导了桥式放大机构的位移和刚度计算公式。
张兆成等人采用了伪刚体模型和卡氏第二定理研究了桥式柔性链的刚度和应力模型。
本文采用解析法建立了桥式放大机构的变形公式,在所建模型的基础上,进一步分析了桥式放大机构的刚度、放等特性,采用ANSYS软件进行仿真,并设计了相关的验证实验。
1 桥式放大机构数学模型柔性桥式微位移放大机构是在一块金属材料上采用线切割技术整体加工而成。
为了保证良好的导向性能,桥式微位移放大机构通常设计成全对称结构,并要求其在运动方向上具有良好的灵敏度,同时在整体上还应具备一定的刚度。
桥式微位移放大机构采用全对称设计,其由4个柔性支链组成,因此对桥式微位移放大机构特性的分析可以简化为对其柔性支链的特性分析,柔性支链的数学模型。
ﻭ为便于分析,作如下假设:ﻭ1)除柔性链外,柔性机构的其他部分均为刚体;ﻭ2)材料为均匀的各向材料;3)柔性桥式微位移放大机构是全对称的;4)柔性链的变形是线弹性的,且弹性变形相对较小。
第一章绪论1.1 柔性铰链简介1.1.1 柔性铰链定义柔性铰链作为一种小体积、无机械摩擦、无间隙和运动灵敏度高的传动结构,被广泛应用于各种要求微小线位移或角位移、且高精度定位的场合。
开创了工作台进入毫米级的新时代。
柔性铰链有成千上万的应用,如:陀螺仪、加速度计、天平、控制导弹的喷嘴、控制器显示仪、记录仪、调整器、放大连杆、计算机、继电器和传动连杆。
60年代前后,由于宇航和航空等技术发展的需要,对实现小范围内偏转的支承,不仅提出了高分辨率的要求,而且对其尺寸和体积提出了微型化的要求。
人们在经过对各种类型的弹性支承实验探索后才逐步开发出体积小、无机械摩擦、无间隙的柔性铰链。
随后柔性铰链在支撑结构、联接结构、调整机构和测量仪器中的得到广泛应用,并获得了前所未有的高精度和稳定性,并日益成熟。
70年代末,美国国家标准局引入了柔性铰链机构以放大压电驱动器的位移,使其设计的工作台既具有亚纳米级的位移分辨率,又具有相对较大的行程。
近年来,柔性铰链以其特殊的性能在精密机械、精密测量、微米技术和纳米技术等领域得到广泛应用没,尤其是柔性铰链与压电致动结合实现超精密位移和定位。
柔性铰链用于绕轴作复杂的有限角位移,它的特点是:无机械摩擦、无间隙、运动灵敏度高。
柔性铰链有很多种结构,最普通的形式是绕一个轴弹性弯曲,这种弹性变形是可逆的。
1.1.2 柔性铰链运动的实现方法柔性铰链是通过弹性形变来实现铰链运动。
施加的弹性变形力会导致铰链中心点偏移其几何中心,从而影响柔性铰链的转动精度。
柔性铰链用于绕轴做复杂运动的有限角位移,它有很多种结构,最普通的形式是绕一个轴弹性弯曲,这种弹性变形是可逆的。
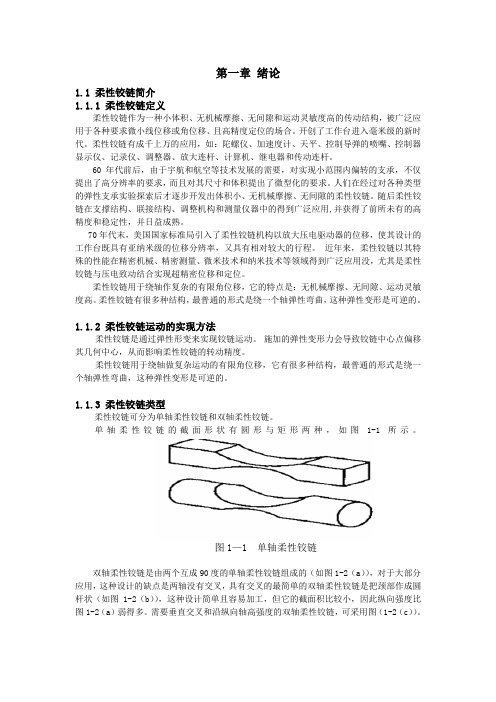
1.1.3 柔性铰链类型柔性铰链可分为单轴柔性铰链和双轴柔性铰链。
单轴柔性铰链的截面形状有圆形与矩形两种,如图1-1所示。
图1—1 单轴柔性铰链双轴柔性铰链是由两个互成90度的单轴柔性铰链组成的(如图1-2(a)),对于大部分应用,这种设计的缺点是两轴没有交叉,具有交叉的最简单的双轴柔性铰链是把颈部作成圆杆状(如图1-2(b)),这种设计简单且容易加工,但它的截面积比较小,因此纵向强度比图1-2(a)弱得多。

微机电系统及纳米技术大作业题目:MEMS motor摘要:本文以微电机驱动方式为线索介绍静电型微电机、电磁型微电机、压电式微电机、形状记忆合金微电机和磁致伸缩型微电机的工作原理,结构组成以及应用前景。
关键字:微电机微机电系统微机械WORD中静电型微电机0 引言现代微电机的发展与新材料技术、微电子技术、微加工技术都息息相关,也正是由于这些包括MEMS等高科技的迅速发展,为微电机的开发和拓展注入了活力。
本文介绍了包括静电微电机、电磁型微电机、压电式微电机、形状记忆合金微电机和磁致伸缩型微电机的工作原理,结构组成以及应用前景。
1 微电机种类1.1 静电型微电机微电子技术的巨大成功在许多领域引发了一场微小型化革命,以加工为纳米结构和系统为目的微米/纳米技术在此背景下应运而生。
自1987年加州大学伯克利分校科学家研制首台静电微电机以来,微电机随着加工工艺、方法的突破取得长足发展。
静电微电机因其与IC(integrate circuit)兼容、转速高、易于控制等诸多优点成为研究重点。
静电微电机技术主体有五个方面,设计建模和仿真、加工制造、应用,如图1。
图1静电微电机包括顶驱动电机、测驱动电机、摆动电机、中心电机、法兰盘电机、线性步进电机、超声电机、双定子轴向驱动可变电容电机、外转子电机、电感应电机、快门电机等。
图2为纳米电机。
图21.1.1 设计MEMS中静电微电机的设计不同于传统电机系统的设计,主要区别是MEMS 的设计需要集成相关的制造和加工工艺新型静电感应微电机的设计,其转子上所加载的负荷主要来自于电机气隙与轴承间产生的粘滞曳力,这些驱动器的加工过程还不能与IC完全兼容。
1.1.2 建模和仿真为了加快和提高MEMS设计,研究者开发出多种建模和仿真工具用于多能域、多学科交叉系统的建模和仿真,如VHDL-AMS可用于微电机的系统建模,Spice 和Saber可用于静电学仿真,ANSYS可用于多能域(机械、热和静电等)系统仿真。