微位移驱动器
- 格式:doc
- 大小:121.50 KB
- 文档页数:3
第33卷 第3期2002年5月 太原理工大学学报JO U RN A L O F T AIY U AN U N IV ERSI TY O F T ECHN O LO G Y V ol.33N o.3 M ay 2002 文章编号:1007-9432(2002)03-0324-02电致伸缩材料微位移驱动器特性研究韩念琛,郭文亮(太原理工大学化学工程学院)摘 要:通过对电致伸缩微位移驱动器的实验研究发现,伸长量方向的力对电致伸缩材料伸长量的影响是随着力的增加而增大,从微观上定性地解释了实验结果。
给出了电致伸缩器(W T DS -1B)“力-电压-伸长量”的特性实验曲线;指出预紧力对电致伸缩器的重要性,并由进一步的实验结果所证实。
关键词:电致伸缩;伸长量;预紧力;特性曲线中图分类号:T P 24;O 738 文献标识码:A 精密加工和超精密加工已成为在国际竞争中取得成功的关键技术,许多现代技术产品需要高精度制造。
发展尖端技术、国防工业、微电子工业等都需要精密和超精密加工制造出来的仪器设备。
当代的精密工程、微细工程和纳米技术是现代制造技术的前沿,也是明天技术的基础[1]。
电致伸缩元件由于具有高分辨率(校正分辨率可达0.001μm),激励电压低,变形量大,受温度影响较小,价格低廉等优点,已广泛应用于超精密车削的微量进给中。
但是电致伸缩元件也有一些不利的方面,这就是伸缩量与激励电压是非线性的,作用力不仅影响伸缩量也改变其线性度。
在机械零件的加工中,力对电致伸缩材料构成的微位移驱动器的影响是不可避免的。
研究力对电致伸缩微位移驱动器特性是非常重要的。
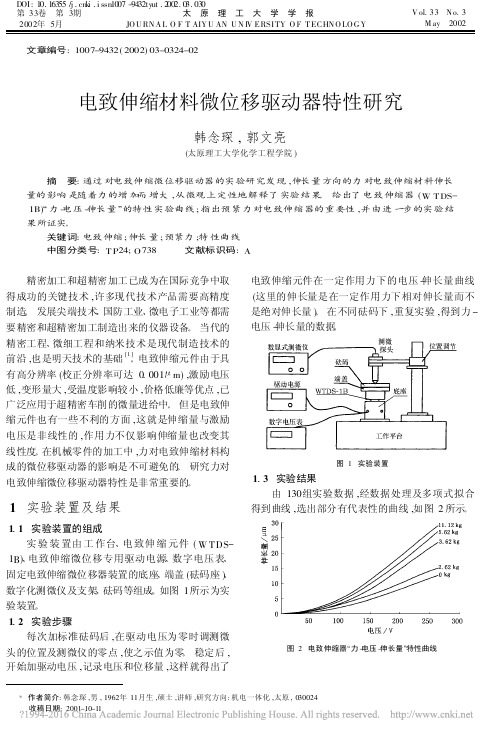
1 实验装置及结果1.1 实验装置的组成实验装置由工作台、电致伸缩元件(W TDS -1B )、电致伸缩微位移专用驱动电源、数字电压表、固定电致伸缩微位移器装置的底座、端盖(砝码座)、数字化测微仪及支架、砝码等组成。
如图1所示为实验装置。
1.2 实验步骤每次加标准砝码后,在驱动电压为零时调测微头的位置及测微仪的零点,使之示值为零。

超磁致伸缩材料微位移驱动器的设计与实验研究超磁致伸缩材料是一种具有广泛潜力的材料,能够将电能转化为微小的机械位移。
在工程应用中,超磁致伸缩材料已经被广泛应用于制作微机械系统的驱动器。
本文将介绍一种利用超磁致伸缩材料制作的微位移驱动器。
首先,我们的驱动器采用由铁、镍和锰等金属组成的超磁致伸缩材料。
在外加磁场的作用下,这些金属会经历瞬间的热膨胀和冷缩,从而产生微小的机械位移。
为了实现微位移的驱动,我们需要将超磁致伸缩材料嵌入到微机械结构中,并将其与控制电路相连。
具体来说,我们将超磁致伸缩材料嵌入到一个微型支架上,并将其固定在基板上。
接着,我们设计了一个微型电极,将其与控制电路相连,并放置在支架的顶部。
在施加外加电压时,电极会产生电场,从而产生磁场,使得超磁致伸缩材料发生瞬时的热膨胀和冷缩,从而产生微小的机械位移。
在实验中,我们采用了ATMEL AVR单片机作为控制电路,并通过程序控制施加的外加电压,从而控制微小的机械位移。
实验的结果表明,我们的微位移驱动器能够非常精确地控制机械位移,达到了微米级的精度。
总之,我们通过利用超磁致伸缩材料制作了一种新型的微位移驱动器,并实现了对微型机械系统的精确控制。
这种驱动器具有极高的应用潜力,在微机械系统、生物医学等领域均有着广阔的应用前景。
1. 超磁致伸缩材料的优势利用超磁致伸缩材料制作微位移驱动器具有很多优势。
首先,超磁致伸缩材料具有非常高的灵敏度和响应速度。
由于它的内部结构可以产生瞬时的热膨胀和冷缩,使得它可以非常快速地从电能转化为机械能。
其次,超磁致伸缩材料还具有比较大的变形能力。
在外加磁场的作用下,它可以发生更大的位移,从而实现更大的机械作用力。
这使得它可以广泛应用于微机械系统的驱动器中。
最后,由于超磁致伸缩材料的制造工艺相对简单,成本也比较低,因此它也具有比较好的经济性和可扩展性。
2. 微机械系统的应用微机械系统是一种基于微米级随机运动的物理现象,其组成的微型机器可以执行多种任务。


压电陶瓷微位移致动器
压电陶瓷微位移致动器是一种利用压电陶瓷材料的压电效应来实现微小位移的装置。
它通常由压电陶瓷元件、驱动电路和机械结构组成。
当在压电陶瓷元件上施加电压时,压电陶瓷会产生应变,从而导致机械结构发生微小的位移。
通过控制施加在压电陶瓷上的电压,可以精确地控制机械结构的位移量。
压电陶瓷微位移致动器具有以下优点:
1. 高精度:可以实现亚微米甚至纳米级别的位移控制,具有很高的精度。
2. 快速响应:压电陶瓷的响应速度非常快,可以实现高速的位移控制。
3. 小尺寸:压电陶瓷微位移致动器通常具有很小的尺寸,可以应用于微型化的设备中。
4. 高能量密度:压电陶瓷材料具有较高的能量密度,可以实现高效率的能量转换。
压电陶瓷微位移致动器在许多领域都有应用,如精密加工、光学调整、生物医学设备、微机电系统等。
它们可以用于实现微小的位置调整、聚焦、变形控制等功能。

低压微位移驱动电路及控制方法【摘要】低压微位移驱动电路和控制方法经过多年的发展,驱动电路及控制理论都逐渐完善,在实际运用过程中也积累了丰富的实践经验,进一步促成了低压微位移驱动电路和控制方法的成熟,到目前为止,低压微位移驱动电路和控制方法在很多领域都得到了广泛的应用,从电子机械,航空天文等各个领域都有了十分深刻的影响,低压微位移驱动电路及控制方法在陶瓷相移器上的广泛应用,通过对参考光束实施相移,不仅仅完美的解决了压电陶瓷低压区非线性误差频繁且误差很大的难题,更让整个仪器重量大幅度降低,体积相对以前的仪器设备更加精致,从而大幅度的降低了仪器成本,进一步推进了低压微位移驱动电路及控制方法在各个领域的深入广泛运用。
笔者将从低压微位移驱动电路的构造,基本的技术要求,驱动元件做出分析,并结合压电陶瓷相移器做出全面深入分析。
【关键词】低压微位移。
驱动电路,控制方法前言在低压微位移驱动电路及控制方法的发展完善历程中,各种形式的轮廓仪器有着十分重要的作用,当人们在经济和科技的发展中,对各种表面的粗糙程度认识逐渐加深,对表面的光滑和各种误差的重要作用有了更加深刻的认识,使得人们更加致力于对各种低压微位移驱动电路控制方法的研究,从20世纪90年代末开始,各种新型光电轮廓仪器不断出现,大大的促进了各种材料学,半导体工业等各个领域的研究,低压微位移驱动电路通过将电脑软件,数学模型,图像技术等各个方面科学的结合,使得可以更加精确更加合理的提高精确度,更好的为各种高精度诸如高精度仪器设备的生产,航空航天工程等各种高科技领域服务。
基本技术要求低压微位移驱动系统的基本结构和技术要求1.基本机构微位移驱动器在拼接镜面主动光学技术中作为定位调节机构,必须同时具有大行程、高精度和大负载的性能。
驱动元件提供运动来源并对微位移驱动器进行总体位移输出控制;位移缩放机构的功能实质上是为满足技术要求,克服源驱动运动中行程和分辨率难以兼顾的缺点,对两种调整以及平衡,整个系统理论上位移输出的分辨率以及行程由该环节决定;导向机构作用是保障微位移驱动器,比如末端输出所需方向的直线位移;预紧措施用于消除或减小间隙、空回和轴向跳动等有害因素的影响,对整个系统的误差控制往往具有至关重要的作用.而在实际的工程应用中大行程和高精度是难以同时兼顾的。
(10)申请公布号(43)申请公布日 (21)申请号 201510421353.3(22)申请日 2015.07.17H02N 2/04(2006.01)(71)申请人南京航空航天大学地址210016 江苏省南京市秦淮区御道街29号(72)发明人刘雪瑞 黄卫清 王寅 李亦君(74)专利代理机构江苏圣典律师事务所 32237代理人贺翔(54)发明名称一种二维压电微位移驱动器(57)摘要本发明公开了一种二维压电微位移驱动器,包括底板1、镜片框7,底板1通过定位块5固定连接有二维双向驱动机构;所述二维双向驱动机构包括外部一维双向驱动单元和内部的一维双向驱动单元,其中外部的一维双向驱动单元通过定位块5固定在底板1上,内部的一维双向驱动单元通过连接件固定在外部的一维双向驱动单元上,所述内部的一维双向驱动单元连接在镜片框7上;外部的一维双向驱动单元与内部的一维双向驱动单元分别在相互垂直的方向上产生两个方向的作用力,使镜片框7沿两个维度运动。
本发明采用了一种基于三角放大原理的位移放大机构,将两个正交方向的放大位移进行串联,两个方向的位移作动均为独立的,互相不会耦合,减少了控制的难度。
(51)Int.Cl.(19)中华人民共和国国家知识产权局(12)发明专利申请权利要求书1页 说明书4页 附图7页CN 105071689 A 2015.11.18C N 105071689A1.一种二维压电微位移驱动器,其特征在于:包括底板(1)、镜片框(7),底板(1)通过定位块(5)固定连接有二维双向驱动机构;所述二维双向驱动机构包括外部一维双向驱动单元和内部的一维双向驱动单元,其中外部的一维双向驱动单元通过定位块(5)固定在底板(1)上,内部的一维双向驱动单元通过连接件固定在外部的一维双向驱动单元上,所述内部的一维双向驱动单元连接在镜片框(7)上;外部的一维双向驱动单元与内部的一维双向驱动单元分别在相互垂直的方向上产生两个方向的作用力,使镜片框(7)沿两个维度运动。
Vol.6 No14 Dec.,2009天 文 研 究 与 技 术ASTRONOM I CAL RESE ARCH&TECHNOLOGY第6卷 第4期2009年12月CN53-1189/P I SSN1672-7673磁致伸缩微位移驱动器性能测试分析3张梦良1,2,戚永军1,杨斌堂31.中国科学院国家天文台南京天文光学技术研究所,南京210042;2.中国科学院研究生院,北京100049;3.上海交通大学机械与动力工程学院,上海200240)摘要:介绍了磁致伸缩微位移驱动器的工作原理,分析了检测方法,设计了使用双频激光干涉仪作为测量基准的测试平台;对该驱动器的位移的输出特性进行了测试,通过拟合处理对测试结果进行数据分析,可提高超磁致伸缩微位移驱动器的线性度和控制精度,使得驱动器性能改善。
基于磁致伸缩效应原理研制的微位移驱动器,具有线性好、分辨率高、精度高等优点,经测试,达到了设定的参数指标要求。
关键词:磁致伸缩效应;微位移;驱动器;多项式拟合中图分类号:TH751s 文献标识码:A 文章编号:1672-7673(2009)04-0342-051 微位移驱动机构分析微位移驱动及其驱动器是大型天文望远镜核心技术———主动光学的关键环节和部件,目前实现微位移驱动大多采用基于液压、电机—减速器式缩微原理的驱动器,应用中潜在或已出现漏液、迟滞等问题。
111 电机—减速器式该微位移机构是直接利用电机作为驱动元件产生微位移,以磁场与通电导体之间的相互作用为基础,具有任意的调节行程,无限的位移分辨率,响应快等特点。
目前应用到天文望远镜上的该类型驱动器,最小步长为10n m,分辨率可达414nm,但主要问题是空回不可控制,成本过高,因此其应用不是很广泛。
112 压电效应式该机构利用压电元件(陶瓷)的逆压电效应来实现微位移,改变输入电压的大小即可得到不同的微位移,从而避免了机械结构造成的误差,所以具有简单、尺寸小、分辨率极高(可达纳米级)、发热少、无杂散电磁场、便于遥控、有较好的动特性和有很高的响应频率(响应时间达100μs)等优点[1],目前在天文望远镜上应用于小行程的较常见;但如果要实现大行程,驱动器的成本非常高,另外还需要使用高压电源,结构复杂。
超精密加工机床的微位移驱动器
马淑梅
【期刊名称】《机械工程师》
【年(卷),期】2000(000)004
【摘要】介绍了一种新型的微位移驱动器,阐述了其原理、结构、特点以及在超精密车削加工中的应用.
【总页数】2页(P9-10)
【作者】马淑梅
【作者单位】同济大学,机械工程系,上海,200092
【正文语种】中文
【中图分类】TG502
【相关文献】
1.超精密机床宏/微双驱动微位移机构的设计与控制 [J], 李国;王波;董申;王石磊
2.超精密柔性压电式微位移机构的研究 [J], 荆丹;陶晓巍;李迎春
3.一种超精密压电式微位移机构研究 [J], 孙宝玉;刘巨;岳晓峰;王登月;任建岳
4.超精密静压支承部件及其在超精密加工机床的应用 [J], 胡秋;夏仰球;米良;李梦阳
5.温度对超精密微位移系统定位精度影响的研究 [J], 卢泽生;张强
因版权原因,仅展示原文概要,查看原文内容请购买。
微位移执行器是精密驱动系统的末端执行环节,由驱动元件(致动器)和微位
移传递机构二部分组成。
目前,微位移驱动元件种类很多,如机电驱动类、电磁
驱动类、压电/电致伸缩驱动类、磁致伸缩驱动类等。
从控制精度和可操作性分
析,压电陶瓷驱动器以其体积小、分辨率高、响应快和推力大等特点有其独特的
优点,但它的输出位移小,尤其在需要较高频响场合位移输出幅度受到了很大的
限制,故目前主要应用在加工中的误差补偿、微量进给和精密调整等场合。
压电陶瓷驱动器(PzT)具有体积小、分辨率高及承载能力强等优点,使用Pzr
控制简单,易实现亚微米甚至纳米级的精度,且不产生热量和噪声。
2.2.1 压电陶瓷微位移器的原理、特点及应用
压电陶瓷微位移器是由多层压电陶瓷薄片,经过多层叠层技术制成的固态移动器,它能直接将电能转换成动能(机械位移)。
压电驱动的工作原理是基于压电体具有逆压电效应:
即当压电体受电场作用时会产生形变。
与其他形式的驱动相比,压电驱动具有的
最大特点和优点是为微米、纳米量级的位移或运动提供了新手段和新途径。
同时,
压电驱动具有控制方便、位移分辨率高、频率响应好、不发热、推力大、无噪声、
外界干扰小等优点。
但压电陶瓷本身存在着非线性、迟滞、蠕变等缺点,需要通
过一些措施来改变和补偿。
压电驱动具有很大的发展前途,大多应用在高技术
领域,如光纤光学定位,自适应光学,生物工程细胞穿制,精密微定位,摄影,
摄像器材快门控制,光纤熔接机等。
2.2.2 电致伸缩陶瓷微位移器(以WTDS型为例)
WTDS电致伸缩微位移器是由PLZT陶瓷材料(在电场作用下,该材料晶格定位引起介电驰豫而发生形变),经叠层工艺制作而成的。
它是一种高分辨电压控制微小应变的器件。
其位移量是由叠层数和电场大小控制的。
它具有工作电压低、分辨率高、响应快、滞后小、回零再现性好、无老化现象、稳定性好等突出优点。
它是光学、机械加工、电子、航空、生物、医学、遗传工程和光纤通讯等领域中实现超精定位、超精加工、误差补偿、相位调制等功能的理想执行器件。
该器件定位精度可达亚微米级,分辨率可达到几十纳米。
2.2.3 超磁致伸缩驱动器
超磁致伸缩驱动器是利用超磁致伸缩材料在外部磁场发生变化时,其材料发生伸长形变这一特点研制的,驱动器是由磁致伸缩棒、永磁铁套桶、驱动用螺线管线圈、轭铁及弹性钢片等组成。
基于超磁致伸缩材料的驱动器以其输出力大、位移分辨力高、位移范围大、漂移小、低压工作等特点在超精密定位系统中有着广阔的应用前景。
但其结构复杂,有漏磁、工作时存在发热和受温度变化影响的缺点和不足。
2.2.4 压电/电致伸缩陶瓷微位移器的比较
压电/电致伸缩陶瓷微位移器是近年发展起来的新型微位移器件,它具有体积小、出力大、精度和分辨率高以及频响高等优点,且不发热、无噪音,目前在光学、电子、航天航空、机械制造、生物工程、机器人等领域得到了广泛的应用。
随着纳米技术的兴起与发展,为了实现精微操作,不但要求压电陶瓷具有很高的可控精度,而且对压电陶瓷位移的线性度、重复性及响应速度的要求也越来越高,但是由于压电陶瓷本身存在着非线性、迟滞、蠕变等缺点,使其应用受到了一定的限制,因而有必要对压电/电致伸缩陶瓷的机理进行进一步的分析和研究。
压电陶瓷和电致伸缩陶瓷都是电介质,电介质在电场的作用下有两种效应,逆压电效应和电致伸缩效应。
其中逆压电效应是指电介质在外电场作用下产生应变,应变大小与电场大小成正比,应变的方向与电场方向有关。
而电致伸缩效应是指电介质在电场的作用下由于感应极化作用引起应变,且应变大小与电场方向无关,但与电场的平方成正比。
上述效应可用公式表达如下:。