三维测量技术综述
- 格式:doc
- 大小:429.00 KB
- 文档页数:9
水工模型试验测量技术综述摘要:水工模型试验是解决工程实际问题,为理论研究和工程设计提供依据的重要手段。
基础数据的准确度与精确度直接关系到试验成果的质量,因此试验中的测量技术非常关键。
流速、流量、水位、压力、地形、泥沙含量等是模型试验中测量的主要数据,本文主要介绍了模型试验中这些数据的测量技术及存在的问题。
关键字:水工模型试验测量方法发展现状问题分析引言水工模型试验是根据相似原理,按照一定的相似比将需要研究的对象,如河流、水工建筑物等按一定比例缩小后,在缩小的模型中复演与原型相似的水流,进行水工建筑物各种水力学问题研究的实验技术,旨在定性或定量的揭示其运动规律或水力学特性,为理论研究和工程设计等提供依据。
自1870年弗劳德(Froude)首先按水流相似准则进行了船舶模型试验以来,随着水利事业的发展,水工模型试验水平在很大程度上有了提高,在理论设计、模型制作、试验测量、数据处理等方面都有了创新突破和发展。
模型试验中的数据测量对试验结果的质量起着至关重要的作用,数据的精确度和准确度直接关系到科研成果的质量。
在水工模型试验中主要需要控制和测量的参数有流速、流量、水位、压力、地形、泥沙等,测量仪器的精度、范围、性能等决定着测量结果的准确性,因而优良的测量技术是模型试验的前提和保障。
近年来随着激光技术、超声波技术、计算机技术及数字图像处理技术等先进技术的发展,模型试验测量技术有了较快的发展,但尚存在一些问题有待进一步研究,本文主要论述模型试验测量技术的发展及现在存在的一些问题。
1.发展现状1.1流速测量技术流体的流速是流场最基本的物理量之一,对流体流动特性的认识很大程度上取决于流场的获得,而大多数描述流场的物理量都直接或间接与流速有关,如环量、涡量、流函数、流速势函数等等。
在模型试验中流速的测量非常重要,随着技术的创新突破,流速的测量技术取得了较快的发展,从单点流速测量发展到多点测量,从单向到多向、从稳态向瞬态发展,从毕托管、旋浆流速仪、热线/热膜流速仪、电磁流速仪、超声波多普勒流速仪(ADV)、激光多普勒流速仪(LDV)、粒子图像测速仪(PIV)发展到VDMS法[1-3]。
三维激光扫描技术在隧道工程领域的应用综述摘要:近年来,随着一大批铁路及地铁陆续开通,运营铁路、地铁、公路隧道巡检市场处于蓬勃发展时期,市场急剧增大,目前依托人工在天窗期进行巡检的方式难以适应市场对高效巡检的要求,如何创新隧道巡检方法,实现高效、准确对运营隧道巡检成为亟待研究解决的问题。
近年来,三维激光扫描测量技术因其在空间信息获取方面具有非接触测量、高精度、高分辨率、信息丰富等诸多优势而崭露头角。
本文研究了三维激光扫描技术在国内外的发展里程,给出了存在问题分析和进一步研究的建议。
关键字:三维激光扫描,隧道巡检,非接触测量1前言三维激光扫描技术又称“实景复制技术”,它通过激光扫描测量方法快速获取被测对象表面的三维坐标数据及其他关键信息。
并集成惯性导航单元(IMU)、DMI组合定位定姿系统、3D激光扫描仪、多传感器同步控制单元、嵌入式计算机、电源供电系统等设备,组建轨道交通测量平台,在同步控制单元的协调下使各个传感器之间实现时空同步,快速采集轨道交通隧道的全断面时空数据。
三维激光扫描技术是一种以激光测距方式快速获取被测物体表面三维坐标及激光反射强度的测量技术,具有非接触测量、高精度、高分辨率、信息丰富等特点。
该技术所采集的高密度点云数据可直观反映物体的集合尺寸、物体表面结构的空间位置关系以及激光反射强度信息,通过CCD传感器还可以获取物体表面的色彩信息,这就为综合性检测提供了可能。
该技术不受光线条件限制,已广泛应用于工程测量、地形测绘、文物修复、逆向三维重建等领域。
2三维激光扫描技术在隧道工程领域的国外发展现状C Mair等成功地将数字摄影技术引入到隧道变形监测领域,检测系统可实现1:20的隧道断面成像后来随着激光扫描技术的快速发展。
2002年,瑞士AMBERG公司生产了GRP 3000轨道检测系统,用于轨道几何尺寸测量和限界评估,实现了快捷的轨道交通检测。
同年,Geraldine S.Cheok等从入射角、目标物颜色和测量距离方面分析了影响三维激光扫描精度的因素。
干涉SAR三维地形成像数据处理技术综述徐华平,陈 杰,周荫清,李春升(北京航空航天大学电子信息工程学院,北京100083) 摘 要:干涉合成孔径雷达(InSAR,Interferometric Synthetic Aperture Radar)三维地形成像技术能够提供精确的高分辨率地形高度信息,它在上世纪后期发展非常迅速,目前仍是SAR技术领域的研究热点之一。
本文给出了干涉SAR三维地形成像数据处理流程及主要步骤,综述了图像配准、相位展开、基线估计以及高度计算等干涉SAR数据处理步骤实现算法的发展概况,比较了各种算法的优劣,最后分析了干涉SAR三维地形成像数据处理所面临的技术难点,并对未来的研究重点作了展望。
关键词:干涉SAR;地形成像;数据处理;相位展开中图分类号:TN958 文献标识码:A 文章编号:167222337(2006)0120015207A Survey of Interferometric SAR Topography Mapping DataProcessing T echniqueXU Hua2ping,CH EN Jie,ZHOU Y in2qing,L I Chun2sheng(Elect ronic and I nf ormation Engineering I nstit ute,Bei j ing Universit y of A eronautics andA st ronautics,B ei j ing100083,China) Abstract: Interferometric synthetic aperture radar(SAR)is employed to supply terrain elevation with high precision and high resolution.It is one of the hot topics in the field of SAR in this century.The flow2 chart and main step s of interferometric SAR data processing are presented.Some research issues of the imple2 mentation of the main step s,such as SAR image registration,phase unwrapping,baseline estimation and ele2 vation calculation,are summarized.In the end,the key problems and the prospect about interferometric SAR data processing are pointed out.K ey w ords: interferometric SAR;topography mapping;data processing;phase unwrapping1 引言 干涉SA R是一种比较理想的三维地形成像技术,它利用天线之间的细微视角差,通过SAR 复图像干涉得到干涉相位,进而根据地形高度与干涉相位之间的关系式获取地形高度信息。
三维纳米材料制备技术综述随着纳米科技的高速发展,越来越多的纳米材料被广泛应用于各个领域。
而在纳米科技研究中,三维纳米材料制备技术是一个焦点和研究热点。
三维纳米材料具有高比表面积、优异的物理和化学性能,因此在能源、催化、传感器等领域有广泛的应用前景。
本文将综述目前主要的三维纳米材料制备技术。
首先,自下而上的构筑是一种重要的制备三维纳米材料的方法。
该方法主要通过分子自组装、溶胶凝胶法和水热合成等方法来实现。
其中,分子自组装方法是将有机分子通过相互作用力自动组装成三维结构,形成纳米尺度的材料。
溶胶凝胶法是将固体溶胶通过溶胶液体在溶胶凝胶转变过程中形成结构独特的凝胶。
水热合成是利用水热条件下形成热力学稳定的材料。
这些方法制备的三维纳米材料具有结构稳定、形貌可控和高比表面积等显著特点。
其次,模板法也是一种常用的制备三维纳米材料的方法。
模板法主要包括模板刻蚀法和模板填充法两种。
模板刻蚀法是利用已有的模板,在模板表面沉积材料后进行刻蚀,形成三维纳米结构。
常见的模板包括纳米颗粒、聚合物模板和胶体晶体等。
模板填充法是将材料填充到模板的孔隙中,并通过去除模板来得到三维纳米材料。
这种方法制备的三维纳米材料具有孔隙结构和高比表面积,可用于催化剂和电化学电极等领域。
再次,电化学沉积也是一种常见的制备三维纳米材料的方法。
该方法主要利用外加电压或电流在电解质溶液中将金属离子还原成固体金属,使其沉积在电极上,形成纳米材料。
通过控制电化学条件,可以得到不同形貌和结构的三维纳米材料。
这种方法制备的纳米材料具有良好的结晶性和导电性,在电极材料和传感器等领域有广泛应用。
最后,还有一些其他的制备方法,如气相沉积、热处理和光刻技术等。
气相沉积是通过在气相中沉积材料,形成纳米尺度的材料。
热处理是通过控制温度和热处理时间来改变材料的结构和形貌。
光刻技术是利用光敏剂对光的化学反应,制备出具有微米和纳米结构的材料。
综上所述,制备三维纳米材料的技术有很多种,每种方法都有其特点和适用范围。
动态三维场景重建研究综述
黄家晖;穆太江
【期刊名称】《图学学报》
【年(卷),期】2024(45)1
【摘要】三维重建技术旨在通过传感器输入,恢复所观测场景的数字化三维表示,是计算机图形学与视觉领域的重要研究方向,在可视化、模拟、路线规划等各类任务上都有重要应用。
相比于静态场景,动态场景额外引入了时间维度,对应的重建任务不仅需要重构每帧细节几何,还需刻画目标随着时间变化的趋势与关联关系用于下游分析任务,为重建算法设计带来了更大的挑战。
然而,目前学界就动态场景重建的讨论依然仅处于起步阶段,且关于现有方法的系统性总结也较为欠缺。
为了填补上述空缺、进一步启发算法设计,对学界当前最新的动态三维场景重建技术进行整理和归纳,对动态三维场景重建问题及其通用求解框架进行一般性的定义,从动态三维表示方式、优化框架方面对已有技术进行综述,并针对结构化的特殊场景讨论对应的重建方法与处理方式。
最终,介绍相关数据集,并对动态三维场景重建现存的问题进行分析总结,对未来工作进行展望。
【总页数】12页(P14-25)
【作者】黄家晖;穆太江
【作者单位】清华大学计算机科学与技术系
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于虚拟现实的三维动态场景重建
2.多Kinect实时室内动态场景三维重建
3.室外动态场景图的构建及其三维重建方法研究
4.ORBTSDF-SCNet:一种动态场景在线三维重建方法
5.动态场景下基于实例分割和三维重建的多物体单目SLAM
因版权原因,仅展示原文概要,查看原文内容请购买。
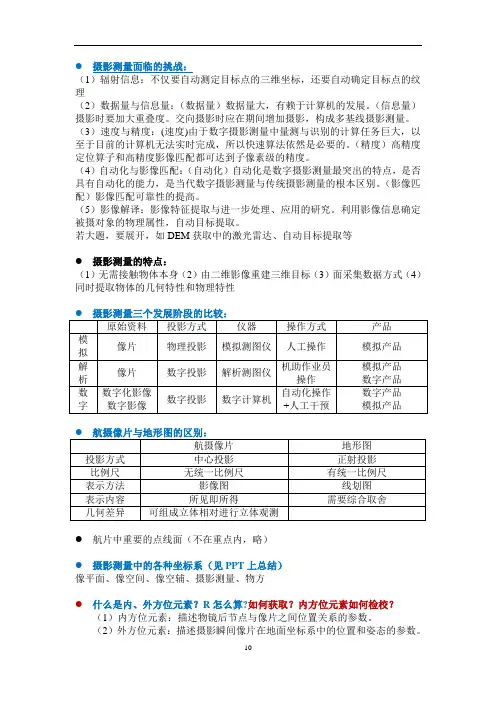
●摄影测量面临的挑战:(1)辐射信息:不仅要自动测定目标点的三维坐标,还要自动确定目标点的纹理(2)数据量与信息量:(数据量)数据量大,有赖于计算机的发展。
(信息量)摄影时要加大重叠度。
交向摄影时应在期间增加摄影,构成多基线摄影测量。
(3)速度与精度:(速度)由于数字摄影测量中量测与识别的计算任务巨大,以至于目前的计算机无法实时完成,所以快速算法依然是必要的。
(精度)高精度定位算子和高精度影像匹配都可达到子像素级的精度。
(4)自动化与影像匹配:(自动化)自动化是数字摄影测量最突出的特点,是否具有自动化的能力,是当代数字摄影测量与传统摄影测量的根本区别。
(影像匹配)影像匹配可靠性的提高。
(5)影像解译:影像特征提取与进一步处理、应用的研究。
利用影像信息确定被摄对象的物理属性,自动目标提取。
若大题,要展开,如DEM获取中的激光雷达、自动目标提取等●摄影测量的特点:(1)无需接触物体本身(2)由二维影像重建三维目标(3)面采集数据方式(4)同时提取物体的几何特性和物理特性●航片中重要的点线面(不在重点内,略)●摄影测量中的各种坐标系(见PPT上总结)像平面、像空间、像空辅、摄影测量、物方●什么是内、外方位元素?R怎么算?如何获取?内方位元素如何检校?(1)内方位元素:描述物镜后节点与像片之间位置关系的参数。
(2)外方位元素:描述摄影瞬间像片在地面坐标系中的位置和姿态的参数。
(3)R的计算:(4)如何获取?外方位元素:后方交会、光束法平差、GPS/POS内方位元素:摄影机检校(5)内方位元素如何检校?●共线条件方程:(1)共线条件方程:描述摄影中心、像点和对应地面点三者位于一条直线上的数学方程。
(2)图片、推导、公式、各项含义:见草稿纸(3)共线方程的应用:求像底点坐标;单像空间后方交会及多像空间前方交会;光束法平差的函数模型;摄影测量的投影基础;航空影像的模拟仿真;利用DEM制作正射影像;利用DEM进行单像测图(前3个为上册内容,后三个涉及DEM以及数字微分纠正)●投影差的作图与计算:δ=rh/H(补图)书 P34●内定向:(1)内定向:解析内定向/数字内定向解析内定向:利用平面多项式变换,将仪器坐标变换为以像主点为原点的像平面坐标。
单目三维重建综述英文回答:Monocular 3D Reconstruction: A Comprehensive Review.Introduction.Monocular 3D reconstruction is the task of estimating the 3D structure of a scene from a single 2D image. This is a challenging problem, as the lack of multiple viewpoints makes it difficult to disambiguate depth and 3D relationships. However, monocular 3D reconstruction has a wide range of applications, including robotics, autonomous driving, and augmented reality.Methods.There are a variety of methods for monocular 3D reconstruction. These methods can be broadly divided into two categories:Geometric methods: These methods use geometric constraints to infer the 3D structure of a scene. For example, vanishing points can be used to estimate the location of the camera and the orientation of planes in the scene.Learning-based methods: These methods use machine learning techniques to learn the mapping from a single 2D image to a 3D representation. For example, convolutional neural networks (CNNs) can be trained to predict the depth map of a scene from a single image.Evaluation.The performance of monocular 3D reconstruction methods is typically evaluated using a variety of metrics, including:Accuracy: The accuracy of a method is measured by the mean absolute error (MAE) between the predicted 3Dstructure and the ground truth.Completeness: The completeness of a method is measured by the percentage of the ground truth 3D structure that is correctly predicted.Robustness: The robustness of a method is measured by its ability to handle challenging conditions, such as noise, occlusions, and motion blur.Applications.Monocular 3D reconstruction has a wide range of applications, including:Robotics: Monocular 3D reconstruction can be used to create maps of the environment for robots. This information can be used for planning, navigation, and object manipulation.Autonomous driving: Monocular 3D reconstruction can be used to create depth maps of the road ahead. Thisinformation can be used to detect obstacles, plan safepaths, and control the vehicle's speed.Augmented reality: Monocular 3D reconstruction can be used to create virtual objects that can be placed in the real world. This technology can be used for gaming, education, and training.Conclusion.Monocular 3D reconstruction is a challenging but important problem with a wide range of applications. In recent years, there has been significant progress in this area, thanks to the development of new methods and the availability of large datasets. As this field continues to develop, we can expect to see even more accurate, complete, and robust monocular 3D reconstruction methods.中文回答:单目三维重建,综述。
沥青路面纹理三维重构及评价方法研究综述目录一、内容概览 (2)1.1 研究背景与意义 (2)1.2 国内外研究现状概述 (4)1.3 研究内容与方法 (5)二、沥青路面纹理三维重构技术 (6)2.1 传统三维重构方法 (7)2.1.1 线性扫描法 (8)2.1.2 激光扫描法 (9)2.1.3 结构光法 (10)2.2 非线性三维重构技术 (12)2.2.1 数字图像相关法(DIC) (12)2.2.2 基于点云数据的三维重建 (14)2.2.3 体素化方法 (15)三、沥青路面纹理三维评价方法 (16)3.1 纹理特征提取 (18)3.1.1 线性特征提取 (19)3.1.2 非线性特征提取 (20)3.2 纹理特征分析 (22)3.2.1 统计分析 (23)3.2.2 时频分析 (24)3.2.3 机器学习方法 (26)3.3 纹理质量评价标准 (27)3.3.1 定量评价标准 (29)3.3.2 定性评价标准 (30)四、实验与结果分析 (31)4.1 实验材料与参数设置 (32)4.2 实验方法与步骤 (33)4.3 实验结果与分析 (34)4.3.1 三维重构效果对比 (36)4.3.2 纹理特征对比分析 (37)4.3.3 纹理质量评价结果 (38)五、结论与展望 (39)5.1 研究成果总结 (40)5.2 存在问题与不足 (41)5.3 未来研究方向展望 (43)一、内容概览随着道路交通的发展和城市化进程的加快,道路路面的性能和舒适性越来越受到人们的关注。
沥青路面作为一种常用的道路材料,其纹理特征对于提高路面的抗滑性、耐磨性和舒适性具有重要意义。
本文主要对沥青路面纹理三维重构及评价方法的研究现状进行综述,旨在为相关领域的研究提供参考。
本文介绍了沥青路面纹理的概念、特点以及在道路性能中的作用。
分析了目前沥青路面纹理三维重构的研究方法,包括基于光学的方法、基于激光扫描的方法和基于图像处理的方法等。
基于机器视觉的尺寸测量应用综述机器视觉技术在工业、质检、医疗等领域都得到了广泛应用。
其中,尺寸测量是机器视觉应用中的一项重要内容。
尺寸测量主要是指对物体各个尺寸参数的测量量化,如长度、宽度、高度、曲率、直线度等。
尺寸测量是机器视觉应用的关键技术之一,其测量结果同时也直接影响到机器视觉应用的成果。
因此,如何进行准确的尺寸测量一直是机器视觉的研究热点。
本文主要就近年来国内外关于基于机器视觉的尺寸测量应用的研究现状进行综述。
一、基于光栅投影的尺寸测量光栅技术和轮廓投影技术是常用的实现光计测量的方法,其中光栅技术的基本原理是将频率已知的光干涉图样通过光透镜成像后投射在被测物体上,得到被测物体表面的精确坐标,再利用相应的算法实现长度、角度等参数的测量。
光栅尺寸测量方法主要包括激光光栅测量法、基于LCD光栅的尺寸测量法、基于DMD光栅的尺寸测量法等。
其中基于DMD光栅的尺寸测量法被广泛应用于三维成像重建,其优点是没有机械移动元件,不影响测量精度,也无需维护和校准。
基于三角测量的尺寸测量主要通过对物体三维坐标的计算和对相机外参的求解,从而得到物体的实际尺寸。
三角测量技术实现非常灵活,可以通过结构光、边缘匹配等方式实现。
其中结构光法应用广泛,可以实现轮廓、表面等形状的三维重建。
近年来,深度学习技术在机器视觉领域迅速发展,并且已经在图像分类、目标检测、图像分割等领域中取得了显著的成果。
同时,利用深度学习技术实现尺寸测量的研究也逐步展开。
其中,通过改进传统卷积神经网络结构和损失函数,结合高精度传感器数据,实现对目标物自由形状区域尺寸的测量,成为当前研究的热点之一。
这种基于深度学习的尺寸测量方法具有计算量小,快速测量的特点,对不同形状的物体都有良好的适应性。
综上所述,基于机器视觉的尺寸测量现在已经广泛应用于工业、医疗、质检等领域,具有准确、快速、可靠的优点。
虽然不同的尺寸测量方法各有特点,但是在实际应用中,需要根据具体场景和物体特点选择合适的测量方法,以达到更好的测量结果。
植物三维建模方法综述¨AnIntToductIontoPlant’s3DModelL聪Me也。
出毛卫强潘云鹤(浙江大学人工智能研究所杭州310027)计算机科学2000V。
127№.6矗bstf粒£Aserlesofpl¥m‘s3。
‘m。
delmgfnethodsa把introdHce矗lnth£3芦秘r,theylnclu如fractalmoden“gmeth。
d,A—system,part”Iesystem,L—systeH、,1ayerbasedm。
deh“gmeth。
d,rnodellngmethodIanMultob。
tanlcalstructureanddevelopmentand抽teractl砷modell“gmethod-ThLsw】Ubehelp{u}inthhturefesearchofpl柏∥s3D如。
delKe舯r出Plant+Ffaeta王,P#rticlesystem,A一§yst£m,L—s拶t‰3bmodeli“g1gI言蠡然景静形状最大的特点楚其不瓶刚镌,比如出峰、树术、云彩、波浪等,而且它们的形状都具有丰富多彩的细节,因此报难用传统的计算机图形学建模方法遘鼯舞窭蓐摸攘。
掖褥弗为最常踅曲垂熬景琨之一,还具有与其他鸯熊辩戏不同雏形状特点。
首先檀钫是一种生物,植物的叶子通过光台怍用从太阳光能中吸收营养+植物的根部栏地下吸收地层表面的水份和土壤中藏豢,蝰耪透过逸些葬势使鑫基茁壮成长,耩趣树技在幂停照生长出来,骝的树校在骤步变褥褪鞋,每一种植物都有自己的嫩长方式.有自己特有的丰富复杂的三缎结构。
其次植物的形状特点是规则与不规则的综台捧,壤喜易区静蔡~檀耪静类型,垣对弱一种类型豹檀镪在自然界是拽币出完垒穗褥酶两探,蔼戴在檀耘的生长过程中,还饕受到各种环境因素的制毒勺,比如太阳光能的强度,地心引力的作用,地面水份的不均匀分毒,城薅雪等壹然璃象豹影响,缓及一些A为鳓寨齄作用,这些导羲了黯褴勃形虢穰攒酶复杂挂。
第17卷第8期2005年8月计算机辅助设计与图形学学报JOURNAL OF COMPU TER 2AIDED DESIGN &COMPU TER GRAPHICSVol 117,No 18Aug 1,2005 收稿日期:2004-03-09;修回日期:2004-07-08 基金项目:国家“八六三”高技术研究发展计划重点项目(2001AA231031,2002AA231021);国家重点基础研究发展规划项目(G1998030608);国家科技攻关计划课题(2001BA904B08);中国科学院知识创新工程前沿研究项目(20006160,20016190(C ))三维网格模型的分割及应用技术综述孙晓鹏1,2) 李 华1)1(中国科学院计算技术研究所智能信息处理重点实验室 北京 100080)2(中国科学院研究生院 北京 100039)(xpsun @ict 1ac 1cn )摘要 对三维网格模型分割的定义、分类和应用情况做了简要回顾,介绍并评价了几种典型的网格模型分割算法,如分水岭算法、基于拓扑和几何信息的分割算法等;同时,对网格分割在几种典型应用中的研究工作进行了分类介绍和评价1最后对三维分割技术今后的发展方向做出展望1关键词 分割Π分解;三维分割;形状特征;网格模型中图法分类号 TP391A Survey of 3D Mesh Model Segmentation and ApplicationSun Xiaopeng 1,2) Li Hua 1)1(Key L aboratory of Intelligent Inf ormation Processi ng ,Instit ute of Com puti ng Technology ,Chi nese Academy of Sciences ,Beiji ng 100080)2(Graduate School of the Chi nese Academy of Sciences ,Beiji ng 100039)Abstract In this paper ,we present a brief summary to 3D mesh model segmentation techniques ,includ 2ing definition ,latest achievements ,classification and application in this field 1Then evaluations on some of typical methods ,such as Watershed ,topological and geometrical !method ,are introduced 1After some ap 2plications are presented ,problems and prospect of the techniques are also discussed 1K ey w ords segmentation Πdecomposition ;3D segmentation ;shape features ;mesh model1 引 言基于三维激光扫描建模方法的数字几何处理技术,继数字声音、数字图像、数字视频之后,已经成为数字媒体技术的第四个浪潮,它需要几何空间内新的数学和算法,如多分辨率问题、子分问题、第二代小波等,而不仅仅是欧氏空间信号处理技术的直接延伸[1]1在三维网格模型已成为建模工作重要方式的今天,如何重用现有网格模型、如何根据新的设计目标修改现有模型,已成为一个重要问题1网格分割问题由此提出,并成为近年的热点研究课题[223]12 网格分割概述三维网格模型分割(简称网格分割),是指根据一定的几何及拓扑特征,将封闭的网格多面体或者可定向的二维流形,依据其表面几何、拓扑特征,分解为一组数目有限、各自具有简单形状意义的、且各自连通的子网格片的工作1该工作被广泛应用于由点云重建网格、网格简化、层次细节模型、几何压缩与传输、交互编辑、纹理映射、网格细分、几何变形、动画对应关系建立、局部区域参数化以及逆向工程中的样条曲面重建等数字几何处理研究工作中[223]1同时,三维网格模型的局部几何拓扑显著性也是对三维网格模型进行检索的一种有效的索引[4]1与网格曲面分割有关、并对其影响巨大的一个早期背景工作是计算几何的凸分割,其目的是把非凸的多面体分解为较小的凸多面体,以促进图形学的绘制和渲染效率1该工作已经有了广泛的研究,但多数算法难以实现和调试,实际应用往往不去分割多面体,而是分割它的边界———多边形网格1多面体网格边界的分割算法有容易实现、复杂形体输出的计算量往往是线性的等优势[5]1另外一个早期背景工作是计算机视觉中的深度图像分割,其处理的深度图像往往具有很简单的行列拓扑结构,而不是任意的,故其分割算法相对简单[6]1三维网格模型的分割算法一般是从上述两类算法推广而来1心理物理学认为:人类对形状进行识别时,部分地基于分割,复杂物体往往被看作简单的基本元素或组件的组合[728]1基于这个原理,Hoffman 等[9]于1984年提出人类对物体的认知过程中,倾向于把最小的负曲率线定义为组成要素的边界线,并据此将物体分割为几个组成要素,即视觉理论的“最小值规则”1由此得到的分割结果称为“有意义的”分割,它是指分割得到的子网格必须具有和其所在应用相关的相对尺寸和组织结构1由于曲率计算方法不同,很多算法给出的有意义的分割结果也存在差异1诸多应用研究[10214]证明,网格模型基于显著性特征的形状分割,是物体识别、分类、匹配和跟踪的基本问题1而有意义的分割对于网格模型显著占优特征的表示和提取、多尺度的存储和传输以及分布式局部处理都是十分有意义的1211 网格分割的发展较早的三维网格分割工作可以追溯到1991年,Vincent 等[15]将图像处理中的分水岭算法推广到任意拓扑连接的3D 曲面网格的分割问题上11992年,Falcidieno 等[16]按照曲率相近的原则,把网格曲面分割为凹面片、凸面片、马鞍面片和平面片11993年,Maillot 等[17]将三角片按法向分组,实现了自动分割;1995年,Hebert 等[18]给出了基于二次拟合曲面片的曲率估计方法,并把区域增长法修改推广应用到任意拓扑连接的网格曲面分割问题中;1995年,Pedersen [19]和1996年Krishnamurthy 等[20]在他们的动画的变形制作过程中,给出了用户交互的分割的方法11997年,Wu 等[3]模拟电场在曲面网格上的分布,给出了基于物理的分割方法;1998年Lee 等[21]和2000年Guskov 等[22]给出了几个对应于简化模型的多分辨率方法;1999年Mangan 等[2]使用分水岭算法实现网格分割,并较好地解决了过分割问题;2001年,Pulla 等[23224]改进了Mangan 的曲率估计工作;1999年,Gregory 等[25]提出一个动画设计中的交互应用,根据用户选择的特征点将网格曲面分割为变形对应片;1999年,Tan 等[26]基于顶点的简化模型建立了用于碰撞检测的、更紧致于网格曲面分割片的层次体包围盒12000年,Rossl 等[27]在逆向工程应用中,在网格曲面上定义了面向曲率信号的数学形态学开闭操作,从而得到去噪后的特征区域骨架,并实现了网格分割;2001年,Yu 等[28]的视觉系统自动将几何场景点云分割为独特的、用于纹理映射和绘制的网格曲面片二叉树;Li 等[29]为了碰撞检测,给出了基于边收缩得到描述几何和拓扑特征的骨架树,然后进行空间扫描自动分割;Sander 等[30]使用区域增长法,按照分割结果趋平、紧凑的原则分割、合并分割片1所有这些方法都是为了使分割的结果便于参数化,即只能产生凸的分割片1由此产生边界不连续的效果12002年,Werghi 等[31]识别三维人体扫描模型的姿态,根据人体局部形状索引进行网格模型的分割;Bischoff 等[32]和Alface 等[33]分别给出了网格分割片光谱在几何压缩和传输中的应用;Levy 等[34]在纹理生成工作中,以指定的法向量的夹角阈值对尖锐边滤波,对保留下来的边应用特征增长算法,最后使用多源Dijkstra 算法扩张分割片实现了网格模型的分割;2003年,Praun 等[35]将零亏格网格曲面投影到球面上,然后把球面投影到正多面体上得到与多面体各面对应的网格模型分割,最后将多面体平展为平面区域以进行参数化,但其结果不是有意义的分割1212 网格分割的分类早期的网格分割算法多为手工分割或者半自动分割,近两年出现了基于自动分割的应用工作1从网格模型的规则性来看,可将分割算法分为规则网格分割、半规则网格分割和任意结构的网格分割算法,根据分割结果可以分为有意义的分割和非有意义的分割1同时,面向不同的应用目标出现了不同的分割策略(见第4节)1目前,网格分割的质量指标主要有三个方面:边界光顺程度、是否有意义、过分割处理效果1多数分8461计算机辅助设计与图形学学报2005年割算法以边界光顺为目标,采用的方法有在三角网格上拟合B样条曲面然后采样[20],逼近边界角点(两个以上分割片的公共顶点)间的直线段[30]等1近年来多数分割算法都追求产生有意义的分割结果1对于过分割的处理方法目前主要有忽略、合并和删除三种方式1多数三维网格分割算法是从二维图像分割的思想出发,对图像分割算法作三维推广得到其三维网格空间的应用1如分水岭算法[2,15,23224,36239]、K2 means算法[40]、Mean2shift算法[41]以及区域增长算法[18,30]等1同样,与图像处理问题类似,光谱压缩[33,42243]、小波变换[31]等频谱信息处理方法在三维网格分割中也有算法1除此之外,同时考虑几何与拓扑信息的分割会产生较好的结果1这方面的工作主要有基于特征角和测地距离度量[44]、基于高斯曲率平均曲率[45247]、基于基本体元[32]、基于Reeb图[48250]、基于骨架提取和拓扑结构扫描[27,29,51252]等使用三维网格曲面形状特征的算法1作为网格模型的基础几何信息,曲率估计方法目前主要为曲面拟合、曲线拟合以及离散曲率等三种1其中曲面拟合法较为健壮,但是计算量大;离散曲率法计算量小,但是除个别算法外都不是很健壮,且无主方向主曲率信息;曲线拟合的曲率估计方法则集中了上述两种方法的优势[3],实际研究中使用较多13 典型三维网格分割算法311 分水岭算法1999年,Mangan等[2]的工作要求输入的是三角网格曲面,以及任何一种可以用来计算每个顶点曲率的附加信息(如曲面法向量等),并针对体数据和网格数据给出了两种曲率计算方法;但是分水岭算法本身和曲率的类型无关1首先,计算每个顶点的曲率(或者其他高度函数),寻找每个局部最小值,并赋予标志,每一个最小值都作为网格曲面的初始分割;然后,开始自下而上或者自上而下地合并分水岭高度低于指定阈值的区域,有时平坦的部分也会得到错误的分割,后处理解决过分割问题1分割为若干简单的、无明确意义的平面或柱面,属于非有意义的分割1Rettmann等[36237]结合测地距离,并针对分水岭算法的过分割给出一个后处理,实现了MRI脑皮层网格曲面的分割12002年,Marty[38]以曲率作为分水岭算法的高度函数,给出了有意义的分割结果1 2003年,Page等[39]的算法同样只分割三角网格,依据最小值规则,他们试图得到网格模型高层描述1其主要贡献为:创建了一个健壮的、对三角网格模型进行分割的贪婪分水岭法;使用局部主曲率定义了一个方向性的、遵循最小值规则的高度图;应用形态学操作,改进了分水岭算法的初始标识集1文献[39]在网格的每一个顶点计算主方向和主曲率,根据曲率阈值,使用贪婪的分水岭算法分割出由最小曲率等高线确定的区域1形态学的开闭操作应用于网格模型每个顶点的k2ring碟状邻域,闭操作会连接空洞,而开操作会消除峡部1创建了标识集后,依据某顶点与其邻接顶点之间的方向,由欧拉公式和已知主曲率计算该顶点在该方向上的法曲率从而得到在该方向上、该顶点与邻接顶点之间的方向曲率高度图,并将其作为方向梯度1对该顶点所在的标识区域使用分水岭算法得到分割片1上述工作表明,分水岭算法在改进高度函数的定义后,可以得到有意义的分割效果1312 基于拓扑信息的网格分割基于几何以及拓扑信息的形状分割方法可以归结为Reeb图[50]、中轴线[52]和Shock图[53254]等1基于拓扑信息的形状特征描述主要有水平集法[55]和基于拓扑持久性的方法[56]11999年,Lazarus等[51]提出从多面体顶点数据集提取轴线结构,在关键点处分割网格的水平集方法,如图1所示1这种轴线结构与定义在网格模型顶点集上的纯量函数关联,称之为水平集图,它能够为变形和动画制作提供整体外形和拓扑信息1图1 人体网格模型及其水平集图文献[51]针对三角剖分的多面体,使用与源点之间的最短路径距离作为水平集函数,基于Dijkstra 算法构造记录水平集图的结构树,其根结点、内部结点和叶子分别表示源点、水平集函数的鞍点和局部最大值点1该工作可以推广到非三角网格模型1 2001年,Li等[29]基于PM算法[57]的边收缩和94618期孙晓鹏等:三维网格模型的分割及应用技术综述空间扫掠,给出了一个有效的、自动的多边形网格分割框架1该工作基于视觉原理,试图将三维物体分割为有视觉意义和物理意义的组件1他们认为三维物体最显著的特征是几何特征和拓扑特征,由此,定义几何函数为扫掠面周长在扫掠结点之间的积分为骨架树中分支的面积;定义拓扑函数为相邻两个扫掠面拓扑差异的符号函数,并定义了基于微分几何和拓扑函数的关键点1文献[29]首先基于PM算法将每条边按照其删除误差函数排序,具有最小函数值的边收缩到边中点,删除其关联的三角形面片;如果某边没有关联任何三角片则指定为骨架边,保持其顶点不变;循环上述过程,得到一个新的、通过抽取给定多边形网格曲面骨架的方法1其次,加入虚拟边连接那些脱节的骨架边,称这些虚拟边以及原有的骨架边组成的树为骨架树,即为扫掠路径1扫掠路径为分段线条1然后,定义骨架树中分支面积(扫掠面周长函数在扫掠结点之间的积分),分支面积较小的首先扫掠,以保证小的、但是重要的分割片被首先抽取出来,以免被其他较大的分割片合并1最后,沿扫掠路径计算网格的几何、拓扑函数的函数值1一旦发现几何函数、拓扑函数的关键点,抽取两个关键点之间的网格曲面得到一个新的分割片1整个过程无需用户干涉12003年,Xiao等[48249]的工作基于人体三维扫描点云的离散Reeb图,给出了三维人体扫描模型的一个拓扑分割方法:通过探测离散Reeb图的关键点,抽取表示身体各部分的拓扑分支,进而进行分割1水平集法具有较高的计算速度和健壮的计算精度1基于拓扑持久性的方法结合代数学,能更准确地计算形状特征,但是没有解决分割问题[55256]1 313 基于实体表示的网格分割2002年,Bischoff等[32]把几何形状分割为表示其粗糙外形的若干椭球的集合,并附加一个独立的网格顶点的采样集合来表示物体的细节1生成的椭球完全填充了物体的内部,采样点就是原始的网格顶点1该方法的步骤如下:Step11首先,在物体原始网格的每一顶点上生成一个椭球,或者随机在物体原始网格上采样选择种子点;每个种子点作为球面上的一个顶点,沿该点的网格法向做球面扩展,直至与网格上另外一个顶点相交;然后沿此两点的垂直方向将球面扩张为最大椭球,直至与第三个网格顶点相交;最后沿此三点平面的法向(即该三点所在平面的柱向)扩张,直至与第四个网格顶点相近,由此得到一个椭球1Step21对生成的椭球进行优化选择,体积最大的椭球首先被选中,以后每一次都将选出对累计体积贡献最大的椭球1如果有若干体积累计贡献相近的椭球同时出现的情况发生,则最小半径最短的椭球被选出1为了简化体积累计贡献的计算,对椭球体素化后计算完全包含在椭球内的体素的数目进行堆排序1发送方传送选出的椭球集合;接收方得到包含基本几何和拓扑信息的椭球集合后,使用Marching Cubes算法或者Shrink2wrapping算法抽取0等值面1显然即使部分椭球丢失,工作依然可以继续:因为椭球是互相重叠的,抽取等值面不影响它们的拓扑关系,而且如果重叠充分,丢失少部分椭球不会影响重要形状信息的重构1如图2所示1图2 以不同数目椭球表示的网格分割Step31在生成很好地逼近原始物体的初始网格后,开始将采样点(即原始网格顶点)插入网格[58]1为了提高最终重构结果的质量,由Marching Cubes算法生成的临时网格顶点在网格原始顶点陆续到来后,最终被删除,因为它们不是物体的原始顶点1314 基于模糊聚类的层次分解2003年,Katz等[44]提出了模糊聚类的层次分解算法,算法处理由粗到精,得到分割片层次树1层次树的根表示整个网格模型S1在每个结点,首先确定需要进一步分割为更精细分割片的数目,然后执行一个k2way分割1如果输入的网格模型S由多个独立网格构成,则分别对每个网格进行同样的操作1分割过程中,算法不强调每个面片必须始终属于特定的分割片1大规模网格模型的分割在其简化模型上进行,然后将分割片投影到原始网格模型上,在不同的尺度下计算分割片之间的精确边界1文献[44]算法优点是:可以对任意拓扑连接的或无拓扑连接的、可定向的网格进行处理;避免了过分割和边界锯齿;考虑测地距离和凸性,使分割边界通过凹度最深的区域,从而得到有意义的分割结果1分割结果适用于压缩和纹理映射14 三维网格分割应用411 三维检索中的网格分割算法在三维VRML数据库中寻找一个与给定物体0561计算机辅助设计与图形学学报2005年相似的模型的应用需求,随着WWW的发展正变得越来越广泛,如计算生物学、CAD、电子商务等1形状描述子和基于特征的表示是实体造型领域中基本的研究问题,它们使对物体的识别和其他处理变得容易1因为相似的物体有着相似的分割,所以分割结构形状描述子可以用于匹配算法1中轴线、骨架等网格模型拓扑结构的形状描述子在三维模型检索中也得到研究,它可以从离散的体数据以及边界表示数据(网格模型)中抽取出来1对于后者,目前还没有精确、有效的结果[39]1但我们相信,依据拓扑信息进行分割得到的分布式形状描述子也是一种值得尝试的三维模型检索思路1 2002年,Bischoff等[32]提出从椭球集合中得到某种统计信息,如椭球半径的平均方差或者标准方差,以及它们的比率,由于这些统计信息在不同的形状修改中都保持不变,作为一种检索鉴别的标识的想法1但是没有严格的理论或者实验结果证明1 2002年,Zuckerberger等[59]在一个拥有388个VRML三维网格模型的数据库上,进行基于分割的变形、简化、检索等三个应用1首先将三维网格模型分割为数目不多的有意义的分割片,然后评价每一个分割片形状,确定它们之间的关系1为每个分割建立属性图,看作是与原模型关联的索引,当数据库中检索到与给定网格模型相似的物体时,只是去比较属性图相似的程度1属性图与其三维模型的关联过程分为三步:(1)分割网格曲面为有限数目的分割片;(2)每一个分割片拟合为基本二次曲面形状;(3)依据邻接分割片的相对尺寸关系进行过分割处理,最后构造网格曲面模型的属性图1对分割片作二次拟合,由此产生检索精确性较差的问题;分割片属性图的比较采用图同构的匹配方法,计算量较大,且是一个很困难的问题;从其实验结果看,有意义的分割显然还不够,出现飞机、灯座等模型被检索为与猫相似的结构;区分坐、立不同的人体模型效果显然也很差等12003年,Dey等[4]基于网格模型的拓扑信息,给出了名为“动力学系统”的形状特征描述方法,并模拟连续形状定义离散网格形状特征1实验表明该算法十分有效地分割二维及三维形状特征1他们还给出了基于此健壮特征分割方法的形状匹配算法1 412 几何压缩传输中的网格分割健壮的网格模型压缩传输方法必须保证即使部分几何信息丢失,剩下的部分至少能够得到一个逼近原始物体的重构,即逼近的质量下降梯度,要大大滞后于信息丢失梯度1无论是层次结构的还是过程表示的多边形网格模型,它们的缺陷是:严格的拓扑信息一致性要求1顶点和面片之间的交叉引用导致即使在传输中丢失了1%的网格数据,也将导致无法从99%的剩余信息里重建网格曲面的任何一部分1对此可以考虑引入高度的冗余信息,即使传输中丢失一定额度的数据,接收方依然可以重构大部分的几何信息1问题的关键是将几何体分割为相互独立的大块信息,如单个点,这样接收方可以在不依赖相关索引信息的情况下,重构流形的邻域关系1为了避免接收方从点云重构曲面的算法变得复杂,早期的健壮传输方法总假设至少整体拓扑信息可以无损地传送1一旦知道了粗糙的形状信息,接收方可以插入一些附加点生成逼近网格12002年,Bischoff等[32,58]在网格分割工作中将每个椭球互相独立地定义自己的几何信息1由于椭球的互相重叠,冗余信息由此产生,因此如果只有很少的椭球丢失,网格曲面的拓扑信息和整体形状不会产生变化1冗余信息不会使存储需求增加,因为每个椭球和三角网格中每个顶点一样,只需要9个存储纯量1其传送过程如下:种子点采样生成椭球集合;传送优化选择的椭球子集;接收方抽取等值面重构逼近网格;以陆续到来的原始网格顶点替换临时网格顶点11996年,Taubin等[42]首先在几何压缩处理中提出光谱压缩,其工作在三维网格模型按如下方式应用傅里叶变换:由任意拓扑结构的网络顶点邻接矩阵及其顶点价数,得到网格Laplacian矩阵的定义及由其特征向量构成的R n空间的正交基底,相对应的特征值即为频率1三维网格顶点的坐标向量在该空间的投影即为该网格模型的几何光谱1网格表面较为光顺的区域即为低频信号12000年,Karni等[43]将几何网格分割片光谱推广到传输问题上1光谱直接应用于定义几何网格的拓扑信息时,会产生伪频率信息1对于大规模的网格,由于在网格顶点数目多于1000时,Laplacian矩阵特征向量的计算几乎难以进行,因此该工作在最小交互前提下,将网格模型分割为有限数目的分割片1该方法有微小的压缩损失,且在分割片边界出现人工算法痕迹12003年,Alface等[33]提出了光谱表示交叠方法:扩张分割片,使分割片之间产生交叠1具体方法是把被分割在其他邻接分割片中的、但与该分割片15618期孙晓鹏等:三维网格模型的分割及应用技术综述邻接的三角片的顶点,按旋转方向加入到该分割片中,从而由于分割片重叠搭接产生冗余信息,并称这种分割片扩展冗余处理的光谱变换为交叠的正交变换1该工作在几何网格压缩和过程传输的应用中明显地改进了Karni等的工作1显然上述工作的基础是良好的网格分割1建立分片独立的基函数将使得分割效果更为理想1413 纹理贴图中的网格分割如果曲面网格的离散化是足够精细的,如细分网格,那么直接对顶点进行纹理绘制就足够了;否则就要把网格模型分割为一组与圆盘同胚的、便于进行参数化的分割片,再对每片非折叠的分割片参数化,最后分割片在纹理空间里拼接起来1网格模型的分割显然会因其局部性而降低纹理映射纹理贴图、网格参数化的扭曲效果1面向纹理的分割算法一般要求满足两个条件:(1)分割片的不连续边界不能出现人工算法痕迹;(2)分割片与圆盘同胚,而且不引入太大的变形就可以参数化1不要求有意义的分割结果12001年,Sander等[30]基于半边折叠的PM算法,使用贪婪的分割片合并方法(区域增长法)对网格模型进行分割1首先将网格模型的每一个面片都看作是独立的分割片,然后每个分割片与其邻接分割片组对、合并1在最小合并计算量的前提下,循环执行分割片对的合并操作,并更新其他待合并分割片的计算量1当计算量超出用户指定的阈值时,停止合并操作1分割片之间的边界为逼近角点间直线段的最短路径,从而减轻了锯齿情况12002年,Levy等[34]将网格模型分割为具有自然形状的分割片,但仍然没有得到有意义的分割结果1为了与圆盘同胚,该算法自动寻找位于网格模型高曲率区域的特征曲线,避免了在平展区域内产生分割片边界,并增长分割片使他们在特征曲线上相交,尽量获得尺寸较大的分割片1414 动画与几何变形中的网格分割影视动画制作中,多个对象间的几何变形特技使用基于网格分割的局部区域预处理1如建立动画区域对应关系,对多个模型进行一致分割,然后在多个模型的对应分割片之间做变形,将提高动画制作的精度和真实性;且每个“Polygon Soup”模型都可用来建立分割片对应;模型间的相似分割有利于保持模型的总体特征1目前,多数的自动对应算法精度较低,手工交互指定对应关系的效率又太低1 1996年,Krishnamurthy等[20]从高密度、非规则、任意拓扑结构的多边形网格出发,手工指定分割边界,构造张量积样条曲面片的动画模型1文献[20]首先在多边形网格的二维投影空间交互选择一个顶点序列,然后自动地将顶点序列关联到网格上最近的顶点上;对于序列中前后两个顶点计算在网格曲面上连接它们的最短路径;对该路径在面片内部进行双三次B样条曲面拟合、光顺、重新采样,得到分割片在两个顶点之间的边界曲线1但计算量的付出依然是非常昂贵的11999年,Gregory等[25]在两个输入的多面体曲面上交互选择多面体顶点,作为一个对应链的端点,对应链上其他顶点通过计算曲面上端点对之间的最短路径上的顶点确定,由此得到这些顶点和边构成的多面体表面网格的连通子图;然后将每一个多面体分割为相同数目的分割片,每个分割片都与圆盘同胚;在分割片之间建立映射、重构、局部加细,完成对应关系的建立;最后插值实现两个多面体之间的变形12002年,Shlafman等[40]的工作不再限制输入网格必须是零亏格或者是二维流形1该算法通过迭代,局部优化面片的归属来改进某些全局函数,因此与图像分割K2means方法相近,属于非层次聚类算法1最终分割片的数目可以由用户预先指定,从而避免了过分割,且适用于动画制作的需求1分割过程的关键在于确认给定的两个面片是否属于同一个分割片1其分割工作是非层次的,因为面片可能会在优化迭代中被调整到另外一个分割片去1该工作表明,基于分割的变形对于保持模型的特征有着重要的意义1局部投影算法能够产生精细的对应区域,且能自动产生有意义的分割片1415 模型简化中的网格分割网格简化是指把给定的一个有n个面片的网格模型处理为另一个保持原始模型特征的、具有较少面片、较大简化Π变形比的新模型1三维网格分割显然可以被看作是一种网格简化,其基本思想是在简化中增加一个预处理过程,先按模型显著特征将其分割为若干分割片,然后在每个分割片内应用简化算法,由此保持了模型的显著特征,如特征边、特征尖锐以及其他精细的细节1例如,把曲率变化剧烈的区域作为分割边界,将曲率变化平缓的区域各自分割开来,就是基于曲率阈值的网格简化方法1网格曲面分割结果的分割片数目在去除过分割后被限制在指定的范围内12561计算机辅助设计与图形学学报2005年。
基于工业摄影与机器视觉的三维测量技术综述 摄影测量(Photogrammetry)是一门通过分析记录在胶片或电子载体上的影像来定被测物体的位置、形状和大小的科学,属于测绘学的分支学科。它包括航空摄测量、航天摄影测量和近景摄影测量等。其中,近景摄影测量是指测量范围小于100米,相机布设在物体附近的摄影测量。近年来,随着微电子和半导体技术的飞速发展,尤其是固体阵相机和计算机硬件的发展,使得工业摄影测量已进入全数字近景摄影测量时代。同时,随着机器视觉理论的迅速发展,机器视觉也逐渐发展成一门由计算机技术、控制理论、人工智能和模式识别等众多领域交叉综合的新学科。 1.三维形貌与变形测量技术简介 光学三维形貌与变形测量技术经过近年来的快速发展,涌现出多种技术及方法。其中主要有:时间飞行法、全息干涉法、莫尔条纹法、结构光方法(点、线、面)、数字摄影测量法和数字图像相关法等,下面介绍几种常用的三维测量方法,并分析在这些方面的研究发展情况。 1)时间飞行法 时间飞行法(Time of Flight)基于三维形貌对激光束产生的时间调制。原理如图1所示。激光脉冲信号从发射器发出,经待测物体表面反射后,沿近乎相同的路径反向传回接收器,检测激光脉冲从发出到接收时刻之间的时间差,就可以计算出距离。结合扫描装置使激光脉冲扫描整个物体就可以得到三维形貌数据。
图1 时间飞行法原理图 时间飞行法的分辨率约为1 mm。若采用亚皮秒激光脉冲和高分辨率的电子器件,深度分辨率可达亚毫米级。采用时间相干的单光子计数法,测量lm距离,深度分辨率可达30μm;另一种称之为飞行光全息技术的测量方法利用超短光脉冲结合数字重建,深度分辨率可达6.5μm,这种方法的优点是不存在阴影和遮挡问题。但是要得到较高的测量精度,对信号处理系统的时间分辨率有较高的要求。 2)全息干涉法 全息干涉法测量技术利用光的相干性原理,如图2所示,当两束相干性好的光束在被测物体表面相遇时,其光波发生干涉,形成的干涉条纹反映了物体的形貌信息。记录这些条纹,测量出相位差,再将相位信息转换为物体的表面形貌信息。
图2 全息干涉法原理图 全息干涉法在20世纪70年代得到快速发展,成为光学三维测量技术的一个重要分支。由于全息干涉法采用干板作为记录介质,干板曝光后需要化学处理,过程十分繁琐,因此限制了它的应用范围。 数字全息技术是利用数字光学器件取代传统光学全息中的干板来记录全息图,重建过程全部在计算机中完成,因此数字全息不仅继承了传统光学全息的特点,而且还具有以下优点:无需干板化学处理,记录过程和处理过程大大简化,再现过程全部由计算机完成,可以实时地进行图像获取和处理,便于实现自动化测量;采用CCD记录一帧图像仅几十毫秒,比干板曝光时间低两个数量级,因而系统的抗震性要求大大降低;数值重建既能得到重建光波的强度分布,也能获取重建光波的相位信息,数字全息干涉测量技术可以精确测定亚条纹及其变形量,测量精度得到提高。 由于相位的变化正比于光波的光程差,所以全息干涉法的测量分辨率可以达到光波的百分之一,但需要相干性较好的光源和精确的干涉光路。外差全息干涉法能得到较高的测量精度,但测量速度极慢,并且系统成本昂贵。准外差方法的测量精度比外差方法低一个数量级,但其光路比较简单,测量速度相对较快。全息干涉法主要应用于形貌分析、微小粒子检测、微小形变、微结构、微缺陷的检测,被测表面必须是平滑而缓变的。 3)莫尔条纹法 莫尔条纹法作为三维形貌测量的重要技术,起源于上世纪70年代。1970年英国的D.M.Meadows等人提出了应用一块光栅的照射型莫尔形貌法。之后,1977年M.Idesawa等人提出了激光扫描型莫尔形貌测量方法。自此,莫尔三维形貌测量成为了莫尔技术的重要研究领域。 莫尔条纹法的原理是用一块基准光栅,来检测由被测表面调制的影栅,进而由莫尔条纹的分布情况推算被测物体的表面形貌。从基本原理出发,出现了两类不同布局的莫尔形貌装置,其中一类是将基准光栅照射到物体表面,在物体表面形成阴影光栅,然后透过整形光栅进行观察,这就是照射型莫尔法。照射型莫尔形貌可称为阴影莫尔形貌,莫尔条纹是由基准光栅和物体表面所调制的、带有物体相位信息的变形光栅叠加而成。照射型莫尔形貌的测量装置简单、廉价,被测物前必须放置一块基准光栅。被测物不大时是可行的,但物体较大时就需要更大的光栅,大尺寸光栅加工困难。测量精度取决于基准光栅的栅距,但制造大尺寸小栅距的光栅是较为困难的。随着栅距的减小衍射效应就变得更加显著,很难获得更高的测量精度。 另一类是投影型莫尔,它的投影侧类似于幻灯装置。用以在被测物体上投射光栅而接收端是一架摄像机,它将空间光栅成像在基准光栅表面上,于是形成莫尔条纹图投影型莫尔形貌测量的主要特点是:通过投影镜头的放大率来改变基准光栅的成像尺寸,适于测量较大尺寸的物体。对于较小的物体,采用缩小投影,既可以提高测量分辨率又可以控制衍射现象的影响。莫尔形貌条纹摄影后再投影,在物体上可以直接观测并把莫尔等高线描绘出来。可以方便地确定物体基准点条纹的序号,并可以将变形光栅取出,通过二次曝光等处理后产生新的莫尔条纹测量方法。但测量装置相对于照射型来说较为复杂,光栅的节距受到透镜分辨率的限制。 4)结构光法 结构光法根据所采用投射光束的不同,又分为点光束照射的光学三角测量技术、线光束照射的光切测量方法以及面光束照明下的空间光调制技术。 (1)光学三角法测量技术是一种基本的三维测量方法。它的测量原理是基于传统的三角测距的方法,根据此原理设计的激光测头多用于改进型的三坐标测量机(CMM),以取代原有的接触式测头。通过这一改进使得三坐标测量机(CMM)从接触式测量迈向了非接触式无损测量。但是这种方法测量范围受到限制,并且由于三坐标测量机(CMM)的固有特性只能进行离散点的测量,而无法获取被测物体全场的形貌。虽然逐步被光切法及面结构光测量技术取代,但它仍是光切法及面结构光三维测量的基础。 (2)光切法以激光逐点扫描法为基础,它采用激光线光源经柱面镜产生平面光照射在被测物表面,在被测物上产生一条明亮的光条,通过摄像机采集获得数字图像,然后经图像处理即得物体在该光切面上的二维轮廓信息,进一步沿第三维步进测量,就可得到物体的三维形貌全貌,原理如图3所示。
图3 线结构光原理图 图4 投影光栅面结构光原理图 但光切法仍然存在采样速度较慢等缺点,且难以实现被测物与测量装置之间的相对旋转测量,不适合大型物体的三维测量。 (3)面结构光技术是将一幅或者多幅光栅图像投影到被测物体表面形成结构照明,最简单的是将一系列光栅投影到物体表面,如图4所示。通过面阵CCD记录被测物体表面每个光栅的变化,并与参考平面上的光栅进行比较计算被测物体的高度信息。 面结构光三维形貌测量技术是通过对平面二维光场分布进行结构化,并投影形成具有一定规律变化的三维空间光场,对被测物体进行照射并记录物体表面光场的变化实现对被测物体高度信息的测量。 5)数字摄影测量法 数字摄影测量系统如图5所示,通过在物体的表面及其周围放置标志点,包括编码点和非编码点,然后从不同的角度和位置对物体进行拍摄,得到一定数量的照片,经过数字图像处理、标志点的定位、编码点的识别,可以得到编码点的编码以及标志点中心的图像坐标。利用这些结果,经过相对定向、绝对定向、三维重建、以及平差计算,最后加入标尺约束及温度补偿,可以得到标志点准确的三维坐标。
图5数字摄影测量系统示意图 工业摄影测量系统使用高分辨率数码相机,从多个角度拍摄预先布置的圆形参考点和带有编码的参考点,然后自动三维重建,得到工件表面参考点的三维坐标,精度可达0.1mm/m。 数字摄影测量能在较短时间内准确地获得被测物体关键点的三维信息,从而实现物体的三维数字化建模,尤其适用于大型复杂工件的三维检测,具有无接触、灵活、快速等优势,因此在反求工程、机械零件测量、虚拟现实等方面具有广泛的应用前景。 6)数字图像相关法 数字图像相关法(Digital Image Correlation Method,DICM)是一种光测力学变形测量方法。数字图像相关法又称为数字散斑相关法(Digital Speckle CorrelationMethod,DSCM)。数字图像相关法的原理是通过图像匹配的方法分析试件表面变形前后的散斑图像,来跟踪试件表面上几何点的运动位移场,然后计算得到应变场。在数字图像相关法算法中,图像匹配时常用图像子区的相关性来衡量不同图像上两个子区的相似程度,因此该图像子区常称为“相关窗”。 与其它变形测量方法相比,数字图像相关法对复杂环境的适应性更好,这是由数字图像相关法的特性决定的。首先,数字图像相关法处理对象是数字化的散斑图像,散斑图像是指一类含随机斑点分布的图像,散斑指图像中的随机斑点。散斑可以由激光照在漫反射表面干涉产生;也可由特殊涂料(如哑光漆等)喷涂在试件表面形成(人工散斑);甚至某些材料表面的纹理也能直接构成散斑(天然散斑)。后两种散斑是图像相关法测量中最常见的。因此,数字图像相关法测量中散斑图像在获取时可直接采用白光照明。这一点克服了前面提到的以干涉为基础的光测方法的缺点,也是数字图像相关法具有更好的适应性的直接原因。其次,数字图像相关法归根结底是一种二维数字图像的分析方法。该方法的测量分辨率与成像系统的物面分辨率(指数字图像上1个像素代表的实际长度)密切相关,物面分辨率高则测量分辨率高;数字图像相关法的测量范围取决于成像系统的视场范围。因此,数字图像相关法测量范围和测量分辨率可以方便地进行调整。这也是数字图像相关法对复杂