纳型卫星热控系统设计与仿真
- 格式:pdf
- 大小:915.00 KB
- 文档页数:4
在轨纳卫星的主动热控建模及控制策略研究
刘佳;李运泽;王浚
【期刊名称】《系统仿真学报》
【年(卷),期】2009()22
【摘要】采用基于微机电(MEMS)的高效冷却技术,利用专家智能整定PID控制策略对纳卫星主动热控系统在轨时受到的轨道热环境及内部热源干扰进行控制。
通过合理的分析与简化,建立了纳卫星MEMS主动热控系统的在轨动态数学模型,并利用人工智能领域专家的知识和经验结合经典PID控制给出了相应的控制策略。
仿真结果验证了所提出的控制策略和方法是有效可行的.对工程应用有着指导意义。
【总页数】4页(P7266-7268)
【作者】刘佳;李运泽;王浚
【作者单位】北京航空航天大学航空科学与工程学院学院
【正文语种】中文
【中图分类】V416
【相关文献】
1.参数自整定模糊PI控制在纳卫星热控系统中的应用
2.纳卫星热系统的在轨动态特性分析与建模
3.应用EHD热管的微小卫星主动热控建模与仿真
4.轨控期间挠性卫星的姿态容错控制及主动振动抑制
5.纳卫星PID主动热控制及其仿真研究
因版权原因,仅展示原文概要,查看原文内容请购买。
人造卫星太阳帆组合导航系统的仿真与控制研究随着科技的飞速发展,人类能够制造出越来越先进的工具与设备,为我们的生活和工作带来了前所未有的便利和效率提升。
其中,人造卫星太阳帆组合导航系统便是一项经过研究和发展得到的高科技技术,它可以为我们的航空和航海领域带来更加精准和安全的导航服务。
在这篇文章中,我将会探讨人造卫星太阳帆组合导航系统的仿真与控制研究。
人造卫星太阳帆组合导航系统简介人造卫星太阳帆组合导航系统是指通过在卫星轨道上放置人造卫星的方式,利用人造卫星通过太阳帆的光压,来进行高精度的导航与定位。
太阳帆是一种轻质、薄型的材料,它可以通过光的压力来提供推动力,是一种非常高效和节能的推进方式。
这种技术对于航空和航海领域来说具有非常重要的意义,因为这样的导航系统可以实现在太空和海洋等环境中的高精度定位和导航,具备很强的安全性和稳定性。
人造卫星太阳帆组合导航系统的仿真为了更好地研究和应用人造卫星太阳帆组合导航系统,需要对其进行仿真研究。
仿真技术是一种通过计算机模拟来实现对物理现象的模拟和分析的技术,它能够帮助科研人员更加方便和快速地进行模型建立、模拟实验和结果分析。
在人造卫星太阳帆组合导航系统仿真研究中,需要对关键参数和环境进行建模。
例如,太阳帆面积、质量、轨道高度、卫星质量、轨道参数等都是非常重要的指标。
同时,太阳光照度、地球重力场、原子时钟偏差等因素也需要考虑进去。
通过建立合理的模型和仿真平台,科研人员可以更好地研究人造卫星太阳帆组合导航系统的性能和优化方案。
人造卫星太阳帆组合导航系统的控制研究在实际应用中,人造卫星太阳帆组合导航系统需要进行精确的控制,以保证其运行稳定和精度高。
因此,在研究人造卫星太阳帆组合导航系统的同时,也需要进行控制算法和方案的研究。
控制研究的核心是建立合理的数学模型和算法,这需要经验丰富的科研人员和一定的计算机编程能力。
在人造卫星太阳帆组合导航系统控制研究中,需要考虑到控制的精度和实时性,以及对系统各个部分的协调。
《面向任务的卫星资源分配、调度仿真平台设计与实现》篇一一、引言随着卫星技术的飞速发展,卫星资源分配与调度问题变得越来越复杂和重要。
为了更好地满足不同任务对卫星资源的需求,设计并实现一个面向任务的卫星资源分配、调度仿真平台显得尤为重要。
本文将详细介绍该仿真平台的设计与实现过程,包括其背景、目的、意义以及相关技术概述。
二、背景与目的随着卫星系统的日益复杂化,如何合理分配和调度卫星资源,以满足各种任务的需求,成为了一个亟待解决的问题。
为了解决这一问题,我们设计并实现了面向任务的卫星资源分配、调度仿真平台。
该平台旨在为卫星资源分配与调度提供一种有效的模拟手段,帮助研究人员更好地理解卫星资源分配与调度的过程,提高卫星系统的性能和效率。
三、相关技术概述在设计和实现本仿真平台之前,我们需要对相关技术进行深入了解。
包括卫星资源分配与调度的基本原理、仿真技术的应用、以及相关软件工具的使用等。
此外,还需要对卫星系统的结构、功能以及任务需求进行详细分析,以便更好地设计仿真平台。
四、平台设计4.1 设计思路本仿真平台的设计思路主要包括以下几个方面:首先,明确平台的目标和功能,确定需要模拟的卫星系统结构和任务需求;其次,设计平台的整体架构,包括数据层、业务层和应用层;最后,根据需求设计相应的模块和功能,如资源分配模块、调度模块、可视化模块等。
4.2 平台架构本仿真平台的架构主要包括数据层、业务层和应用层。
数据层负责存储和管理卫星资源数据、任务数据等;业务层负责实现资源分配、调度等业务逻辑;应用层则提供用户界面,方便用户进行操作和交互。
4.3 模块设计(1)资源分配模块:负责根据任务需求和卫星资源情况,进行资源分配。
该模块需要支持多种资源分配算法,以便用户根据实际需求选择合适的算法。
(2)调度模块:负责根据资源分配结果,制定调度方案。
该模块需要支持多种调度策略,如优先级调度、轮询调度等,以满足不同任务的需求。
(3)可视化模块:负责将仿真结果以图表、曲线等形式展示给用户,方便用户直观地了解仿真过程和结果。
《海洋遥感卫星组网观测仿真系统设计》篇一一、引言随着科技的飞速发展,海洋遥感技术已经成为我们探索和保护海洋资源的重要手段。
通过高效和准确的遥感技术,我们能够监测到海水的污染程度、海况、海流等多种重要信息。
为此,本文设计了一个海洋遥感卫星组网观测仿真系统,通过仿真分析,以期实现更精确的海洋信息获取和更高效的资源利用。
二、系统设计目标本系统的设计目标主要有以下几点:1. 高效地收集和传输海洋信息,以实现实时的海洋环境监测。
2. 通过卫星组网技术,实现对海洋的全方位、多角度观测。
3. 利用仿真技术,预测和优化海洋遥感卫星的观测效果。
4. 提供一个用户友好的界面,方便用户进行操作和数据分析。
三、系统设计架构本系统主要由以下几个部分组成:卫星组网模块、数据收集与传输模块、数据处理与分析模块以及用户界面模块。
1. 卫星组网模块:该模块负责卫星的定位、组网以及控制。
通过精确的卫星定位和组网技术,实现对海洋的全方位、多角度观测。
2. 数据收集与传输模块:该模块负责从卫星上收集数据,并通过高速数据传输网络将数据传输到数据中心。
3. 数据处理与分析模块:该模块负责对收集到的数据进行处理和分析,包括数据的预处理、数据分析和结果输出等。
4. 用户界面模块:该模块提供了一个用户友好的界面,方便用户进行操作和数据分析。
四、系统设计流程1. 卫星组网:根据观测需求,精确地定位卫星并实现组网。
2. 数据收集与传输:通过卫星传感器收集数据,并利用高速数据传输网络将数据传输到数据中心。
3. 数据处理与分析:对收集到的数据进行预处理,包括去除噪声、校正误差等,然后进行进一步的数据分析和结果输出。
4. 结果输出与展示:将分析结果以图表、报告等形式展示给用户,方便用户进行决策和分析。
五、仿真系统设计为了更准确地预测和优化海洋遥感卫星的观测效果,本系统设计了一个仿真系统。
该仿真系统可以模拟卫星的观测过程,包括卫星的定位、观测角度、观测时间等,从而预测出观测结果。
《面向任务的卫星资源分配、调度仿真平台设计与实现》篇一一、引言随着卫星技术的快速发展,卫星资源分配和调度问题日益凸显其重要性。
为了有效管理和优化卫星资源,提高卫星系统的运行效率和可靠性,本文提出了一种面向任务的卫星资源分配、调度仿真平台的设计与实现。
该平台能够模拟卫星系统的工作环境和任务需求,为卫星资源的合理分配和调度提供决策支持。
二、背景与意义在卫星系统的运行过程中,资源分配和调度是关键环节。
如何合理分配卫星资源,提高系统性能和运行效率,已成为卫星系统建设与发展的重要课题。
传统的人工分配和调度方法存在效率低、误差大等问题。
因此,有必要设计一款高效的仿真平台,实现对卫星资源的智能分配和调度。
本文设计的仿真平台,可以有效地解决这一问题,为卫星资源的优化管理提供决策支持。
三、平台设计1. 需求分析面向任务的卫星资源分配、调度仿真平台应具备以下功能:能模拟卫星系统的工作环境和任务需求;能对卫星资源进行合理分配和调度;能提供决策支持,优化卫星系统性能。
根据需求分析,平台设计应包括资源管理模块、任务管理模块、仿真引擎模块和用户交互模块。
2. 模块设计(1)资源管理模块:负责管理卫星系统的各类资源,包括通信资源、计算资源、存储资源等。
通过建立资源数据库,实现资源的实时监控和动态调整。
(2)任务管理模块:负责接收并处理各种任务需求,将任务分配给合适的卫星资源进行处理。
通过任务优先级、任务类型等信息,实现任务的智能调度。
(3)仿真引擎模块:负责模拟卫星系统的工作环境和任务需求。
通过建立仿真模型,实现卫星系统的实时仿真和预测。
(4)用户交互模块:提供用户与平台的交互接口,实现用户对平台的操作和控制。
通过图形化界面,展示仿真结果和决策支持信息。
四、技术实现1. 关键技术本平台采用云计算、大数据、人工智能等技术实现卫星资源的智能分配和调度。
通过建立资源池,实现资源的集中管理和动态调度;通过机器学习算法,实现任务的智能分配和调度;通过仿真技术,实现卫星系统的实时仿真和预测。
《海洋遥感卫星组网观测仿真系统设计》篇一一、引言随着科技的不断进步,海洋遥感技术已成为海洋科学研究、环境保护、资源开发等领域的重要手段。
海洋遥感卫星组网观测仿真系统设计,旨在通过集成多颗遥感卫星的数据,实现对海洋环境的全面、实时、高精度的监测。
本文将详细阐述该系统的设计思路、技术实现及潜在应用。
二、系统设计目标本系统设计的主要目标包括:1. 实现多颗海洋遥感卫星的数据集成与处理;2. 提升海洋环境监测的实时性与精确性;3. 提供高效、可靠的海洋环境信息获取手段;4. 为海洋科学研究、环境保护、资源开发等领域提供强有力的技术支持。
三、系统组成与设计1. 数据采集层:本层主要负责从多颗海洋遥感卫星中获取数据。
通过与卫星数据提供商合作,实时获取高分辨率的卫星遥感数据。
2. 数据预处理层:本层对采集到的原始数据进行预处理,包括数据格式转换、噪声去除、数据校正等操作,以保证数据的准确性与可靠性。
3. 数据处理与分析层:本层采用先进的图像处理技术,对预处理后的数据进行进一步的处理与分析,提取出海洋环境的相关信息。
4. 数据存储与传输层:本层负责将处理后的数据存储到数据库中,并实现数据的快速传输与共享。
5. 用户交互层:本层提供友好的用户界面,使用户能够方便地查询、浏览、分析海洋环境信息。
四、技术实现1. 数据集成与处理技术:采用遥感图像处理技术,对多源、异构的卫星遥感数据进行集成与处理,提取出有用的信息。
2. 实时性与精确性提升技术:通过优化数据处理流程,提高系统的实时性与精确性。
同时,采用高精度的地理信息数据,对卫星遥感数据进行地理配准与校正。
3. 用户交互界面设计:采用先进的Web技术,设计友好的用户界面,使用户能够方便地查询、浏览、分析海洋环境信息。
五、潜在应用1. 海洋科学研究:为海洋科学家提供高精度、实时的海洋环境数据,支持海洋环境监测、海洋生态评估、海洋污染监测等研究工作。
2. 环境保护:为环境保护部门提供实时的海洋环境信息,支持海洋污染防治、海岸线管理、海洋生态保护等工作。

《面向任务的卫星资源分配、调度仿真平台设计与实现》篇一一、引言随着卫星技术的飞速发展,卫星资源分配与调度成为了航天领域研究的热点问题。
为了有效管理和利用卫星资源,提高卫星系统的运行效率,面向任务的卫星资源分配、调度仿真平台的设计与实现显得尤为重要。
本文将详细介绍该仿真平台的设计思路、实现方法及其实用价值。
二、平台设计目标本仿真平台的设计目标主要包括以下几个方面:1. 实现卫星资源的合理分配,满足不同任务的需求。
2. 优化卫星调度策略,提高卫星系统的运行效率。
3. 提供友好的用户界面,方便用户进行操作和交互。
4. 支持多种卫星系统仿真,具有较高的可扩展性和灵活性。
三、平台设计思路本仿真平台的设计思路主要分为以下几个步骤:1. 需求分析:明确平台的功能需求和性能需求,为后续设计提供依据。
2. 系统架构设计:采用模块化设计思想,将平台分为资源分配模块、调度策略模块、用户界面模块等,确保各模块之间的耦合度低,便于后续维护和扩展。
3. 资源建模:建立卫星资源模型,包括卫星轨道、载荷、能量等资源,为资源分配和调度提供数据支持。
4. 调度算法设计:针对不同任务需求,设计多种调度算法,如优先级调度、轮询调度等,以满足多样化的任务需求。
5. 仿真环境构建:构建真实的卫星系统仿真环境,包括卫星运动、信号传输等仿真过程,为资源分配和调度提供仿真环境。
6. 用户界面开发:开发友好的用户界面,方便用户进行操作和交互。
四、平台实现方法本仿真平台的实现方法主要包括以下几个方面:1. 采用高级编程语言进行平台开发,如C++、Python等,确保平台的稳定性和可维护性。
2. 利用数据库技术进行数据存储和管理,如关系型数据库MySQL、NoSQL数据库MongoDB等,确保数据的可靠性和高效性。
3. 采用模块化开发思想,将平台分为资源分配模块、调度策略模块、用户界面模块等,便于后续维护和扩展。
4. 利用仿真软件进行卫星系统仿真,如MATLAB/Simulink 等,为资源分配和调度提供真实的仿真环境。
基于SuperMap 的卫星虚拟仿真系统设计与实现(1.郑州师范学院,河南郑州450053;2.河南省地质矿产勘查开发局测绘地理信息院,河南郑州450006)摘要:为了研究卫星的运行轨迹,基于SuperMap iDesktop 9D 、3ds Max 、Visual Studio 2012等平台,采用轨道动力学、三维模型可视化和C #语言实现了卫星轨道可视化目标,设计并实现了基于SuperMap 的卫星虚拟仿真系统。
该系统可通过三维可视化的方式更加直观、生动地反映卫星以及卫星在轨的运行状态和工作方式等,对于人们直观研究卫星轨道控制和仿真具有一定的实用价值。
关键词:SuperMap ;卫星虚拟仿真系统;可视化中图分类号:P208文献标志码:B文章编号:1672-4623(2022)09-0077-04Design and Implementation of Satellite Virtual Simulation System Based on SuperMapGAO Fan 1,WANG Yanliang 2,CHEN Fuqiang 2,WU Wei 1,HE Jiaqi 1,BAI Tianqi 1(1.Zhengzhou Normal University,Zhengzhou 450053,China;2.Institute of Surveying,Mapping and Geoinformation of Henan Provincial Bureau of Geo-exploration and Mineral Development,Zhengzhou 450006,China)Abstract:In order to study the satellite orbit,based on SuperMap iDesktop 9D,3ds Max and Visual Studio 2012platform,we used orbit dynam-ics,3D model visualization and C #language to realize the visualization of satellite orbit,and designed and implemented the satellite virtual simu-lation system based on SuperMap.Through the way of 3D visualization,this system can more intuitively and vividly reflex the satellite and the operation state and working mode of the satellite in orbit.The results have certain practical value for people to study satellite orbit control and simulation intuitively.Key words:SuperMap,satellite virtual simulation system,visualization收稿日期:2021-04-22。
航天器姿态控制系统的设计与仿真研究导语:航天器姿态控制系统是航天工程中一个关键的技术领域,其设计与仿真研究对确保航天器的安全、稳定和精确进行空间任务具有重要意义。
本文将就航天器姿态控制系统的设计与仿真研究进行探讨和分析,从准确性、稳定性和可靠性等方面提出一些建议。
一、引言航天器姿态控制系统是控制航天器在宇宙空间中保持稳定的关键系统。
其主要功能是对航天器进行定向和旋转控制,使其能够完成各种任务,如卫星定位、星际探索和空间站建设等。
因此,航天器姿态控制系统的设计与仿真研究是保证航天器任务成功的前提。
二、航天器姿态控制系统的设计1.航天器姿态控制系统的组成航天器姿态控制系统主要由传感器、控制器和执行机构三部分组成。
传感器用于测量航天器的姿态,控制器根据传感器测量值计算出控制信号,执行机构根据控制信号执行动作。
2.控制策略的选择在航天器姿态控制系统的设计中,选择合适的控制策略至关重要。
目前常用的控制策略有PID控制、最优控制和自适应控制等。
根据所需的精度要求、计算资源和系统特点等因素来选择合适的控制策略。
3.控制器的设计控制器是航天器姿态控制系统的核心,其设计需要考虑稳定性、可靠性和精度等因素。
控制器可以采用模拟控制、数字控制或混合控制等方式进行设计。
此外,还需要考虑控制器的模型选择、参数调节和鲁棒性等问题。
4.执行机构的选择执行机构是根据控制信号执行动作的装置,通常采用推进器或姿态控制发动机。
在选择执行机构时,需要考虑其输出能力、响应速度和可靠性等指标。
三、航天器姿态控制系统的仿真研究1.仿真原理和方法航天器姿态控制系统的仿真研究是通过建立数学模型,并基于该模型进行仿真实验来评估系统的性能。
仿真可以通过数值仿真、物理仿真或混合仿真等方法进行。
2.仿真环境的建立仿真环境的建立是保证仿真研究的准确性和实用性的关键。
需要考虑的因素包括航天器的物理特性、外部环境的影响以及传感器和执行机构的模型。
3.仿真实验的设计在进行航天器姿态控制系统的仿真研究时,需要设计合适的仿真实验来验证控制算法和系统设计的有效性。
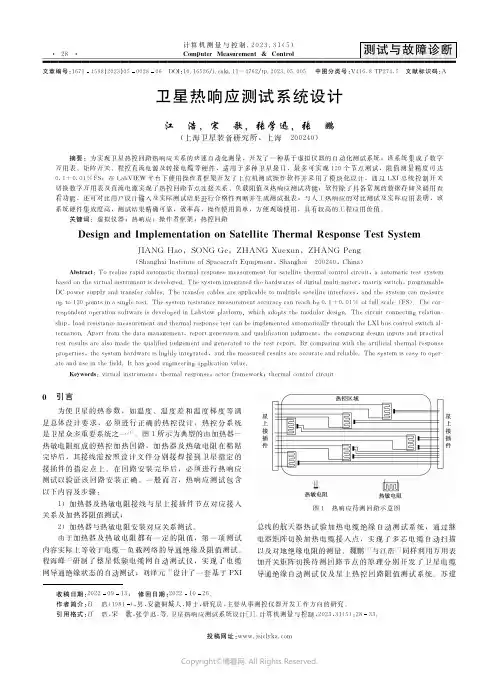
!计算机测量与控制!"#"$!$%!&"!!"#$%&'()'*+%('#',&-!",&(".!#"'!#收稿日期 "#""#(%$$!修回日期"#""%#")%作者简介 江!浩!%('%"&男&安徽桐城人&博士&研究员&主要从事测控仪器开发工作方向的研究%引用格式 江!浩&宋!歌&张学迅&等!卫星热响应测试系统设计(*)!计算机测量与控制&"#"$&$%!&"*"'$$!文章编号 %)+%,&(' "#"$ #&##"'#)!-./ %#!%)&") 0!1234!%%5,+)" 67!"#"$!#&!##&!中图分类号 g ,%)<'89"+,<&!文献标识码 ;卫星热响应测试系统设计江!浩 宋!歌 张学迅 张!鹏!上海卫星装备研究所&上海!"##",#"摘要 为实现卫星热控回路热响应关系的快速自动化测量&开发了一种基于虚拟仪器的自动化测试系统$该系统集成了数字万用表'矩阵开关'程控直流电源及转接电缆等硬件&适用于多种卫星接口&最多可实现%"#个节点测试&阻值测量精度可达#<%j #<#%_I J $在>A ]g /H L 平台下使用操作者框架开发了上位机测试操作软件并采用了模块化设计&通过>e /总线控制开关切换数字万用表及直流电源实现了热控回路节点连接关系'负载阻值及热响应测试功能$软件除了具备常规的数据存储及调用查看功能&还可对比用户设计输入及实际测试结果进行合格性判断并生成测试报表$与人工热响应的对比测试及实际应用表明&该系统硬件集成度高&测试结果精确可靠&效率高&操作使用简单&方便现场使用&具有较高的工程应用价值%关键词 虚拟仪器$热响应$操作者框架$热控回路/'+01,*,8P #$.'#',&*&0",",5*&'..0&'?:'(#*.N '+$",+'?'+&56+&'#*/;M N G A E &J .M N N P &f G;M N e C P \C 2&f G;M N9P 2B!J @A 2B @A 4/2T 646C 6P E X J 7A 1P 1S A X 6H Y C 47Q P 26&J @A 2B@A 4!"##",#&=@42A "3A +&(*4&*8E S P A R 4O P S A 74KA C 6E Q A 6416@P S Q A R S P T 7E 2T PQ P A T C S P Q P 26X E S T A 6P R R 46P 6@P S Q A R 1E 26S E R 14S 1C 46&AA C 6E Q A 6416P T 6T FT 6P Q ]A T P K E 26@P V 4S 6C A R 42T 6S C Q P 264T K P V P R E 7P K !8@P T F T 6P Q426P B S A 6P K 6@P @A S K Z A S P T E X K 4B 46A RQ C R 64[Q P 6P S &Q A 6S 4\T Z 461@&7S E B S A Q A ]R P -=7E Z P S T C 77R F A 2K 6S A 2T X P S 1A ]R P T !8@P 6S A 2T X P S 1A ]R P T A S P A 77R 41A ]R P 6EQ C R 647R P T A 6P R R 46P 426P S X A 1P T &A 2K 6@P T F T 6P Q1A 2Q P A T C S P C 76E %"#7E 426T 42A T 42B R P 6P T 6!8@P T F T 6P QS P T 4T 6A 21PQ P A T C S P Q P 26A 11C S A 1F 1A 2S P A 1@]F #<%j #<#%_E X X C R R T 1A R P !I J "!8@P 1E S [S P T 7E 2K P 26E 7P S A 64E 2T E X 6Z A S P 4T K P V P R E 7P K 42>A ]V 4P Z 7R A 6X E S Q &Z @41@A K E 76T 6@PQ E K C R A SK P T 4B 2!8@P14S 1C 461E 22P 1642B S P R A 64E 2[T @47&R E A K S P T 4T 6A 21PQ P A T C S P Q P 26A 2K 6@P S Q A R S P T 7E 2T P 6P T 61A 2]P 4Q 7R P Q P 26P K A C 6E Q A 641A R R F 6@S E C B @6@P>e /]C T 1E 26S E R T Z 461@A R [6P S 2A 64E 2!;7A S 6X S E Q6@P K A 6AQ A 2A B P Q P 26&S P 7E S 6B P 2P S A 64E 2A 2K Y C A R 4X 41A 64E 20C K B Q P 26&6@P 1E Q 7A S 42B K P T 4B 2427C 6T A 2K 7S A 1641A R 6P T 6S P T C R 6T A S P A R T EQ A K P 6@P Y C A R 4X 4P K 0C K B P Q P 26A 2K B P 2P S A 6P K 6E 6@P 6P T 6S P 7E S 6!W F 1E Q 7A S 42B Z 46@6@P A S 64X 414A R 6@P S Q A R S P T 7E 2T P 7S E 7P S 64P T &6@P TF T 6P Q@A S K Z A S P 4T @4B @R F 426P B S A 6P K &A 2K 6@PQ P A T C S P K S P T C R 6T A S P A 11C S A 6P A 2K S P R 4A ]R P !8@P T F T 6P Q4T P A T F 6E E 7P S [A 6P A 2KC T P 426@P X 4P R K !/6@A T B E E KP 2B 42P P S 42B A 77R 41A 64E 2V A R C P !B '6C "(8+*V 4S 6C A R 42T 6S C Q P 26$6@P S Q A R S P T 7E 2T P $A 16E S X S A Q P Z E S 3$6@P S Q A R 1E 26S E R 14S 1C 46D !引言为使卫星的热参数&如温度'温度差和温度梯度等满足总体设计要求&必须进行正确的热控设计&热控分系统是卫星众多重要系统之一(%)%图%所示为典型的由加热器5热敏电阻组成的热控加热回路&加热器及热敏电阻在粘贴完毕后&其接线需按照设计文件分别接焊接到卫星指定的接插件的指定点上%在回路安装完毕后&必须进行热响应测试以验证该回路安装正确%一般而言&热响应测试包含以下内容及步骤*%"加热器及热敏电阻接线与星上接插件节点对应接入关系及加热器阻值测试$""加热器与热敏电阻安装对应关系测试%由于加热器及热敏电阻都有一定的阻值&第一项测试内容实际上等效于电缆5负载网络的导通绝缘及阻值测试%程海峰(")研制了整星低频电缆网自动测试仪&实现了电缆网导通绝缘状态的自动测试$刘泽元($)设计了一套基于9e /图%!热响应待测回路示意图总线的航天器热试验加热电缆绝缘自动测试系统&通过继电器矩阵切换加热电缆接入点&实现了多芯电缆自动扫描以及对地绝缘电阻的测量%魏鹏(,)与江浩(&)同样利用万用表加开关矩阵切换待测回路节点的原理分别开发了卫星电缆导通绝缘自动测试仪及星上热控回路阻值测试系统%苏建第&期江!浩&等*""""""""""""""""""""""""""""""""""""""""""""""""""""卫星热响应测试系统设计#"(!#军'宋宏江等()')基于嵌入式计算机技术&分别开发了便携导弹电缆测试仪及数字式电缆测试仪&可以实现电缆的导通测试和绝缘测抗电强度测试%第二项测试内容&主要利用电源对加热器进行加热&然后测量对应热敏电阻的温度变化来验证加热器与热敏电阻的对应安装关系%韩熙(()设计了真空热实验参考点热响应测试系统&然而该方案仅适用于$个已知节点连接特性参考点热响应测试%孙兴华(%#)设计了真空热试验热响应测试程序&适用于电源5加热器5测温元件一一对应的场合&可快速检测加热点与测温点的热响应关系%实际在进行星上热响应测试时&加热器及热敏电阻回路不仅对应关系复杂&存在一点加热多点测量的情况&配备的加热电源也仅有一台%因此&目前的热响应测试模式还是依靠测试人员手动将电源接入到某一加热片并控制电源上电加热&另一测试人员使用万用表逐点测试热敏电阻阻值&然后查热敏电阻温度映射表计算温度并人工判断对应关系这一方法%该方法不仅费时费力&出错概率也较高&因此急需开发能够一次满足两项测试内容的自动化测试系统%根据星上热响应测试任务需求&设计开发了一种基于虚拟仪器的自动化热响应测试系统&通过使用模块化的数字万用表'矩阵开关及程控电源&在软件的控制下自动完成热控回路的热响应各项测试任务&具有测试自动化程度及效率高&使用方便灵活&测试结果准确等优点%E !测试需求及原理根据卫星热响应测试需求&系统应该能够自动检测加热器'热敏电阻的节点连接特性&阻值特性及其热响应关系&并根据用户输入的设计文件内容进行合格性判断&自动保存测试结果并生成指定格式报表%测试系统应具备图形化操作界面&用户可以对常用测试选项进行设置&具备温度&电流&电压超限安全保护功能%测试系统主要技术指标如下*%"测试接入节点个数*%"#个$""加热最大功率*)##L &最大电流*,;&最大电压*%&#g $$"程控电流精度*#<&_设定值&程控电压精度*#<"&_设定值$,"阻值测量精度*#<%j #<#%_I J $&"适配接插件型号*%$种%根据测试需求&测试系统硬件采用程控电源&矩阵开关及数字万用表的设计方案%其核心是通过切换矩阵开关将待测回路的不同节点接入程控直流电源或数字万用表&实现回路加电以及阻值或温度测试%图"所示为矩阵开关切换指定待测节点并将其接入阻值测试或加热回路原理图%当行开关接入的是数字万用表时&列%行%及列"行"的开关闭合时&构成了回路节点%和节点"之间电阻测试回路%同理&如当行开关接入的是程控电源时&列%行%及列"行"的开关闭合时&构成了回路节点%和节点"之间的加热回路%热响应测试时&闭合连接程控电源矩阵开关的不同列接头将加热回路中指定的加热器接入直流电源的输出端&上位机控制直流电源对其加电%同时&上位机控制数字万用表及其连接矩阵开关扫描测量热敏电阻的阻值&并根据热敏电阻阻值5温度分度表计算对应的温度&获得指定加热器加热时所有测温点的温升情况&即可判断加热器5热敏电阻的响应关系%图"!矩阵开关切换测试示意图F !硬件设计及选型图$所示为热响应自动测试系统硬件结构框图%图中上位机与9e /机箱及直流电源通过网线连接通信%两块"%%"'矩阵开关板卡及数字万用表插在9e /机箱内&机箱的背板插槽为其供电并交互数据%其中一个矩阵开关两个行开关接头与数字万用表的正负表柱相连接&列开关接头与D "[%"#8^航空插座相连接&另一个矩阵开关两个行开关接头程控直流电源输出正负极相连接&列开关接头与D "[%"#8^航空插头相连接座%这两个航空插头是连接测试系统与星上待测回路的统一接口%图$!热响应自动测试系统结构框图由于星上待测回路的接口形式多样&因此制作不同规格的转接电缆共%$根&每根电缆的一端为D "[%"#f *航空插头与测试系统相连接&另一端根据实际需求连接了不同形!!计算机测量与控制!第$%""""""""""""""""""""""""""""""""""""""""""""""""""""卷#$#!#式的接插件并与待测回路的星上接出接插件相匹配&对实际卫星型号基本上做到了全覆盖%转接电缆决定了待测回路节点与测试系统的矩阵开关列开关接头之间的对应关系&使用时根据需实际情况正确选择%表%列出了转接电缆编号'星上回路接插件型号'接头节点编号对应关系%表%!转接电缆接头型号及节点编号对应表转接电缆编号星上回路端接插件接头型号节点测试机接插件节点e #%I #%*$#*G *%##8*##J #%[;9%!%##%!%##e #"I #%*%,;[%#%f ^>%!%#%%!%#%e #$I #%*%,;[+,f ^>%!+,%!+,I #"*%,;[$'f ^>%!$'+&!%%"e #,I #%*%,;[)"8*%!)"%!)"I #"*$);[&"8*%!&")$!%%,e #&I #%*$);[+,f ^>%!+,%!+,I #"*$);[$'8^%!$'+&!%%"e #)I #%*$);[$'f ^>%!$'%!$'I #"*%,;[&%f ^>%!&%$(!'(I #$*%,;[")8^%!")(#!%%&e #+I #%*$);[)"f ^>%!)"%!)"I #"*$);[&"8^%!&")$!%%,e #'I #%*%,;[&%8^%!&%%!&%I #"*$);[")f ^>%!")&"!++I #$*$);[$'8*%!$'+'!%%&e #(I #%*$);[)"8^%!)"%!)"I #"*$);[&"f ^>%!&")$!%%&e %#I #%*$#*G 8%##f ^##M #%%!%##%!%##I #"*%,;[(8^%!(%#%!%#(e %%I #%D "[$)8^%!$)%!$)I #"*%,;[%&8^%!%&$+!&%I #$*%,;[")8^%!")&"!++I #,*%,;[$'f ^>%!$'+'!%%&e %"I #%*%,;[)"f ^>%!)"%!)"I #"*%,;[&%8*%!&")$!%%$e %$I #%*%,;[%&8*%!%&%!%&I #"*%,;[")f ^>%!")%)!,%I #$*$);[")8^%!"),"!)+I #,*%,;[$'8^%!$')'!%#&H !软件设计测试软件部分基于>A ]g /H L 开发&它是美国国家仪器!M /"公司研制的程序开发环境%>A ]g /H L 被称为,N -语言&即图形化编程语言(%%%")&其核心是,数据流-&通过数据在连线上的流动&实现程序流程的控制及功能的实现&是测试测量领域主流工具(%$)H G E !软件模块及架构热响应测试系统软件根据测试的功能需求将软件分为节点连接关系及阻值测试'热响应测试及数据管理三大模块&每个模块包含若干个小的功能模块&如图,所示%整个软件在测试时&需要对电源&矩阵开关及数字万图,!软件功能模块用表进行控制&同时响应用户的指令并实时更新显示测试数据&是一个典型的并发式多线程任务%为此&软件设计时采用了>A ]V 4P Z 的操作者框架!;16E SI S A Q P Z E S 3"%操作者框架是一个软件类库&用以支持编写有多个独立运行且相互间可通信的应用程序%在该类型应用程序中&每个操作者!;16E S"执行着一组独立的系统任务&操作者本身维持着自己的内部状态&并通过统一接口形式的消息!:P T T A BP "与其它的操作者相互通信(%,%&)%本软件基本架构设计如图&所示%图&!软件架构设计图中主界面为根操作者&测试控制为其嵌套操作者&矩阵开关控制'程控电源控制'数字万用表控制及数据库操作又作为测试控制的底层嵌套操作者%主界面接受用户各种输入&并将其传递给测试控制%测试控制相当于软件的大脑&在后台运行&根据用户输入将测试任务分解为矩阵开关'万用表及程控电源的动作%矩阵开关'万用表及程控电源在测试控制下相互配合完成测试过程&同时以消息的形式向测试控制发送自身产生的数据及状态&测试控制接收后向主界面发送并显示%数据管理操作者完成数据管理任务&它不操作设备硬件&主要涉及的是文件及数据库操作%在图&所示的架构下&消息仅在根操作者与其嵌套操作者中之间传递&同一层级的操作者实现了相互解耦&可极大提高代码的复用性%H G F !节点连接关系及阻值测试用户在使用时&需导入待测回路设计表&选择转接电缆型号&输入待测回路名称&该回路名称将是最终生成的第&期江!浩&等*""""""""""""""""""""""""""""""""""""""""""""""""""""卫星热响应测试系统设计#$%!#数据文件名称的一部分%开始测试后&软件根据输入的转接电缆型号调取转接电缆数据库中内容判断设计表中的待测回路与转接电缆是否匹配&如成功匹配则进入连接关系及阻值测试&不成功则提示用户检查转接电缆及待测回路设计表%连接关系测试等同于电缆5负载网络的导通绝缘及阻值测试%软件首先将数字万用表置于最大量程&采用二分法测试接入网络节点的导通绝缘关系&该方法相比星上热控回路阻值测试系统(&)中所采用的遍历法可大大节省测试时间%导通绝缘测试结束后对比待测回路设计表&判断两种形式的不合格*应连通节点绝缘及应绝缘节点连通%完成上述步骤后&软件根据所测连通节点的最大阻值设置合适的量程&再次测量连通节点的阻值&在测量时会减去转接电缆数据库中存储的线缆内阻以保证测量结果的准确性%测量结束后软件判断第三种形式的不合格*阻值超限%所有测试结果将以表格形式呈现&如图)所示%如果测试结果与待测回路设计表中的连通节点及阻值对比判断合格&表明待测热控回路第一项测试通过%图)!导通绝缘及阻值测试结果H G H !热响应测试热敏电阻及加热器回路的连接关系测试通过后&执行热响应测试%用户需要导入热敏电阻回路设计表&加热器回路设计表&热敏电阻5加热器热响应设计表&选择两种回路的转接电缆%用户还需输入加热时间!分钟"'加热功率!L &该输入带保护功能&最大上限为$#L "'以及合格温升!a "%热响应测试带有保护功能&用户输入保护温度&保护电流!;"及保护电压!g "%热响应测试时&软件同样先执行输入匹配性检查&确保回路转接电缆型号与设计表相对应&同时检查确认热敏电阻5加热器热响应设计表中各热敏电阻及加热器均包含在导入的热敏电阻回路及加热器回路设计表中%匹配性检查通过后&软件将根据热敏电阻5加热器热响应设计表中的加热器名称逐一按照设置的加热时间和加热功率来为各加热器加电&同时扫描测量热敏电阻回路各个测量点的阻值并转换为温度%每完成一个加热器加热&根据用户输入的合格温升作为判断响应的依据&从而得出与其响应的所有热敏电阻%当所有加热器均加热完毕后&即可得到整个回路的加热器5热敏电阻热响应关系&并与用户导入的热响应设计表对比以判断合格性%不合格包含两种情况*加热器加热后设计对应的热敏电阻未响应以及非设计对应的热敏电阻产生了响应%软件在执行检测任务时持续监控所有热敏电阻的温度&电源电流及电压&任一数据超限即发出警报并将电源输出置零后关闭&打开所有开关节点&以保护回路及卫星安全%图+所示为热响应测试结果&图中最上方显示了当前加热器名称&实时加热时间'功率及电流%图中上方左侧为所有测温热敏电阻的当前温度及加热前温度&右侧则以图形的形式显示了所有测温点的温度5时间曲线%最右侧为报警指示灯%图中最下方为热响应温升汇总表&汇总了每一个加热器加热后&所有热敏电阻的温升情况%热响应符合设计表的不做标记$对于前述第一种热响应不合格&在对应的行列做出蓝色标记$对于第二种热响应不合格&在对应的行列做出红色标记%通过图形和表格的形式实时显示加热和温度情况&不仅提供的信息全面丰富&而且也非常直观%图+!热响应测试结果显示H G I !数据管理数据管理包含转接电缆数据管理&测试数据存储&报表生成以及历史数据查看等功能%转接电缆数据库存储了转接电缆名称'接插件型号'接插件节点与测试系统的矩阵开关列开关接头之间对应关系以及转接电缆内阻等信息%转接电缆数据管理功能支持增加'编辑及删除转接电缆的功能%如因测试需要新制作了转接电缆&可以通过该功能将其加入数据库中型号%测试数据存储在每次测试结束后自动执行&文件格式为8-:J 且不可编辑&保证原始数据的安全性$报表生成功能则将原始数据保存为用户指定格式的H \1P R 报表%表"!A"所示为热敏电阻回路节点连接关系测试报表&包含了热敏电阻的节点连接关系及合格性判断&由于热敏电阻阻值与温度有关&对其合格性判断不包含对阻值范围的判断%表"!]"所示为加热器回路节点连接关系及阻值测试报表&同样包含了回路节点连接关系以及合格性判断&其合格性除了连接关系之外还包含了对阻值范围的判断%报表内容丰富&方便查看%热响应测试报表&由多个页面组成&内容为每一个加热器对应的热响应测试结果'合格性判断及温升汇总表%单个加热器的报表中包含了每个加热器的名称'接插件型号'节点编号'设计响应热敏电阻'实测响应热敏电阻'温升判断阈值以及加热开始和结束时间%表$!A "表明8U %加热器的实际响应热敏电阻与设计相符合&结论合!!计算机测量与控制!第$%""""""""""""""""""""""""""""""""""""""""""""""""""""卷#$"!#格$表$!]"表明8U "加热器的设计响应热敏电阻&,"$)未响应&结论不合格$表$!1"表明8U $加热器设计响应热敏电阻&,"$,未响应&非设计响应热敏电阻&,"$)有响应&结论不合格$表$!K "为温升汇总结果&供用户对比判断%温数据库管理的历史数据查看功能可以让用户调取存储的原始测试结果文件并显示在软件界面中以表格和图形的形式查看&不仅更加直观&也可以方便与报表做对比检查&确保数据的准确有效%表"!节点连接关系及阻值测试报表!A"热敏电阻回路节点连接关系测试报表序号电连接器编号型号端点%端点$热敏电阻名称导通+绝缘设计实测实测阻值+$合格判断%"$,&)+I #"*$);[")f ^>%"&,"$+导通导通&$+)<$"合格$,&,"$)导通导通&&"$<")合格&)&,'),导通导通&,(,<"%合格+'&,"$,导通导通&&%$<'+合格(%#&,"$&导通绝缘+不合格%$%,&,"$(导通绝缘+不合格%&%)&,",#绝缘导通&,+(<$"不合格!]"加热器回路节点连接关系及阻值测试报表序号电连接器编号型号端点%端点$加热器名称阻值+$设计实测误差容限+$合格判断%"$,&)+I #"*%,;[$'f ^>%"8U %%%"<+,%%"<)&"合格$,8U "%%$<%'%%"<%""合格+'8U $%%"<)#%%"<,)"合格(%#8U ,%%"<(%%%&<+("不合格%%%"8U &%%"<(%绝缘"不合格%$%,8U )%%"<(%绝缘"不合格&)+绝缘%%"<+++不合格表$!热响应测试报表!A "8U %加热器加热器名称8U %电连接器编号I #"电连接器型号*%,;[$'f ^>加热器端点%&"加热开始时间%(*%,*%#加热结束时间%(*%,*,%温升判断阈值+a %#合格性判断合格热敏电阻名称设计&,"$&&,"$+实测&,"$&&,"$+热敏电阻电连接器编号设计I #"实测I #"热敏电阻电连接器型号设计*$);[")f ^>实测*$);[")f ^>热敏电阻端点设计(&%#%&"实测(&%#%&"!]"8U "加热器加热器名称8U "电连接器编号I #"电连接器型号*%,;[$'f ^>加热器端点$&,加热开始时间%(*%,*,%加热结束时间%(*%&*%"温升判断阈值+a %#合格性判断不合格热敏电阻名称设计&,"$)实测不存在热敏电阻电连接器编号设计I #"实测不存在热敏电阻电连接器型号设计*$);[")f ^>实测不存在热敏电阻端点设计$&,实测不存在!1"8U $加热器加热器名称8U $电连接器编号I #"电连接器型号*%,;[$'f ^>加热器端点&&)加热开始时间%(*%&*%$加热结束时间%(*%,*,&温升判断阈值+a %#合格性判断不合格热敏电阻名称设计&,'),&,"$,实测&,'),&,"$,热敏电阻电连接器编号设计I #"实测I #"热敏电阻电连接器型号设计*$);[")f ^>实测*$);[")f ^>热敏电阻端点设计&&)+&'实测&&)$&,!K"温升汇总表序号热敏电阻名称加热器加热温升+a 8U %8U "8U $%&,"$&%$<"#<"#<%"&,"$+%%<"'<"#<"$&,"$)#<%)<'%%<$,&,'),#<$#<"%'<&&&,"$,#<"##<%I !试验结果与分析为检验测试系统的准确性&将该系统连接到星上热控回路网络进行了热响应测试&并与人工手持万用表标定测试进行对比&比较二者之间的连接关系识别的准确性&阻值测试误差&热响应关系识别准确性以及测试时间%自动化的测试流程如图'所示%第&期江!浩&等*""""""""""""""""""""""""""""""""""""""""""""""""""""卫星热响应测试系统设计#$$!#图'!热响应自动化测试流程图表,比较了手动标定的及系统自动测试的加热器回路连接关系及阻值结果&由表中数据可知&该系统对于回路节点连接关系识别准确无误&阻值测量结果精确可靠&与标定的阻值相对误差几乎可以忽略%表,!回路连接关系及阻值对比节点连接关系阻值+$标定机测标定机测阻值相对误差+_%&"%&"$%'<+,$%(<)&#<"($&,$&,$%'<%'$%(<""#<$$'&('&("%"<)""%$<$+#<$&%#&%%%#&%%"%"<#'"%"<,(#<%(%&&%)%&&%)%"+<%&%"+<,+#<"&表&比较了手动标定及系统自动测试的热响应关系与设计输入的对比&表中加热器名称及热敏电阻名称均为该元件在回路中的代号%由表中数据可知&该系统对于回路节点连接关系识别准确无误%表&!热响应关系对比加热器名称设计响应热敏电阻标定响应热敏电阻机测响应热敏电阻8e %&,"+)&,"+)&,"+)8e "&,"++&,"++&,"++8U %),&$"),&$"),&$"8U "),&$$),&$$),&$$8U $),&$,),&$,),&$,从测试时间来看&$#个节点接插件接入&个负载的回路连接关系及阻值测量&需要两个熟练的测试人员近,#分钟遍历完成$回路中包含的&组热响应关系也需要近,&分钟时完成%而自动化的测试系统完成第一项测试任务仅需约&分钟!二分法测试时间与回路连接的密度有关&越是稀疏连接时间越短"&第二项测试任务也仅需"#分钟%自动化测试系统仅需一人即可完成整个测试过程&不仅可极大提高测试效率&还可减少人工操作时引入的各项错误操作&如数据记录及结果对比&错检'漏检或重复检查等%特别是在热响应测试时&自动化测试系统加热时每一处测温点的温度均可实时观察&各项保护功能也使得测试过程更加安全%J !结束语卫星热响应测试系统集成了模块化的数字万用表&矩阵开关及程控电源&结合>A ]g /H L 环境下开发的软件&实现了卫星热控回路的热响应关系自动化测试%该系统具有自动化程度高&使用灵活&操作简单&人机交互界面显示信息全面直观等优势%实际应用表明&该系统可大幅提升测试效率&节省人力资源&在有效避免漏检及重复检查的同时得出准确可靠的测试结果&具有较高的工程应用价值%参考文献(%)徐福祥!卫星工程概论(:)!北京*宇航出版社&"#%$!(")程海峰&张!岩&焦荣惠&等!一种整星低频电缆网自动测试仪的功能实现(*)!航天器环境工程&"#%&&$"!&"*&##&#$!($)刘泽元&冯!尧&梁!硕&等!航天器热试验加热电缆绝缘自动测试系统的设计(*)!电子测量技术&"#%+&,#!("*"&""&)!(,)魏!鹏&李志明&郑丽得!星上电缆自动导通绝缘测试仪的设计与开发(*)!计算机测量与控制&"#%+&"&!%#"*$#&$#(!(&)江!浩&韦!笑&汪新舜&等!星上热控回路阻值测试系统设计(*)!计算机测量与控制&"#"#&"'!%"*,+!())苏建军&郑永丰&于功敬&等!便携式电缆测试仪的设计(*)!计算机测量与控制&"##)&%,!%%"*%&'&%&''!(+)苏建军&路林海&吴明强&等!高压电缆测试仪的设计(*)!计算机测量与控制&"##'&%)!$"*,$',,#!(')宋宏江&孟晓风&王!琳!高压电缆测试仪的设计(*)!计算机测量与控制&"##'&%)!""*"''"'(!(()朱!熙&韩!放&申!彬&等!真空热试验温度参考点热响应测试系统设计与实现(*)!计算机测量与控制&"#%'&")!""*+"#+""!(%#)孙兴华&韩!放&裴一飞!真空热试验热响应测试程序设计(*)!航天器环境工程&"#%#&"+!)"*"''"(#!(%%)陈树学&刘!萱!>A ]g /H L 宝典(:)!北京*电子工业出版社&"#%&!(%")8S A V 4T *&^S 42B *!>A ]g /H L 大学实用教程(:)!北京*电子工业出版社&"#%"!(%$)戴鹏飞&王胜开&王格芳&等!测试工程与>A ]g /H L 应用(:)!乔瑞萍译!北京*电子工业出版社&"##)!(%,)丁!蔚&彭!诚&李!军&等!基于虚拟仪器面向对象编程技术的计量校准程序(*)!计量学报&"#%(&,#!)J "*)(+,!(%&)王!洋&魏洪峰&姜明波&等!基于>A ]g /H L 面向对象编程的温度自动检定校准系统设计与实现(*)!计算机测量与控制&"#%+&"&!""*&,&)!。
航空航天器导航控制系统设计与仿真导航控制系统在航空航天器的设计与运行中起着至关重要的作用。
它不仅可确保飞行器的安全性和可靠性,还可以提高其性能和效率。
本文将介绍航空航天器导航控制系统的设计原理和仿真方法,并探讨其在实际应用中的意义和挑战。
航空航天器导航控制系统包括导航系统和控制系统两个主要部分。
导航系统是根据目标位置和当前位置之间的差异来确定航向和导航路径的。
它利用各种传感器、导航设备和信息处理技术来获取和处理位置、速度和姿态等关键参数。
而控制系统则根据导航系统提供的信息,采取相应的控制策略来改变航空航天器的状态,以实现预期的飞行任务。
在航空航天器导航系统中,惯性导航系统和全球卫星导航系统(GNSS)是两个常用的子系统。
惯性导航系统通过测量和集成加速度和角速度传感器的输出来估计飞行器的位置、速度和姿态。
而GNSS则利用全球卫星网络提供的定位服务来获得更准确的位置信息。
这两个系统通常是同时工作的,相互补充以提供更准确和可靠的导航结果。
航空航天器控制系统则根据导航系统提供的位置和速度信息来生成相应的控制指令,以调整飞行器的运动状态。
控制系统包括自动驾驶系统、舵机、发动机等关键组件。
自动驾驶系统根据预先设定的路径和任务要求,通过控制舵机和发动机来实现飞行器的自动导航。
舵机通过调整航行姿态和舵面位置来控制飞行方向和姿态。
发动机则通过控制动力输出来调整飞行速度和加速度。
为了确保导航控制系统的性能和可靠性,设计与仿真是必不可少的步骤。
设计阶段通过建立数学模型和系统架构,确定控制策略和参数。
仿真阶段则通过在计算机上进行模拟实验,评估系统性能、验证设计可行性,并进行优化调整。
在设计阶段,需要考虑各种因素,包括飞行任务要求、环境条件、航空航天器特性等。
通过建立数学模型和控制方程,可以对系统进行分析和建模,并根据设计要求来优化控制策略和参数。
在仿真阶段,可以利用计算机软件模拟航空航天器的运动和控制过程。
通过输入不同的工况和外部干扰,可以评估系统对不同情况的响应。
龙源期刊网 http://www.qikan.com.cn 微纳卫星导航通信一体化系统设计与实现 作者: 陈夏 黄佳 来源:《现代电子技术》2019年第01期
關键词: 微纳卫星; 卫星导航; 卫星通信; 数据传输; 遥测; 一体化设计 中图分类号: TN402⁃34; TN406 ; ; ; ; ; ; ; ; ; ; 文献标识码: A ; ; ; ; ; ; ; ; ; ;文章编号: 1004⁃373X(2019)01⁃0005⁃04
Abstract: An implementation scheme of navigation and communication integrated system suitable for micro/nano satellite is proposed to improve the resource utilization of micro/nano satellite, in which the functions of telemetry, telecontrol, data transmission, navigation and positioning of the satellite are integrated, and the limits and requirements in volume, weight and power consumption of micro/nano satellite are considered. The design method of the system is given. The implementation methods of hardware platform, software architecture and data protocol are elaborated in detail. The technical realization approaches of products as adopting FPGA, ASIC and other integration circuit technologies are proposed to realize the high integration, miniaturization, light weight and low power consumption. The designed system has been used in multiple types of micro/nano⁃satellites, its longest working time in orbit is more than two years, and the satellite is still in good condition. The system can be expanded to other micro/nano⁃satellites.
卫星导航系统的设计与优化随着人类社会的进步,导航系统的需求越来越高,而卫星导航系统是目前最为广泛应用的一种导航系统。
其基础设施包括地面控制站、宇宙航天器和用户终端设备。
卫星导航系统最早由美国开发,目前全球使用最广泛的卫星导航系统是美国的GPS系统和俄罗斯的GLONASS系统。
近年来,我国也成功地独立研发了北斗卫星导航系统。
如何设计出更为稳定、精确、高效的卫星导航系统,一直是研究人员探索的方向。
一、卫星导航系统的工作原理卫星导航系统是一种基于卫星的导航系统,使用的技术主要包括航天技术、电子技术、计算机技术、通信技术等。
卫星导航系统的工作原理是通过地球周围的卫星向用户发射射频信号,用户接收到卫星信号后可以通过其信号成功进行定位、导航和测量。
卫星导航系统主要由三部分组成:卫星、地面控制站、用户终端设备。
卫星负责向用户发射信号并接收信号,地面控制站则负责对卫星进行测量、计算和控制,用户终端设备则需要根据接收到的信号进行位置计算、导航和测量。
二、卫星导航系统需要保证其稳定性、精确性和高效性。
因此,在设计时需要考虑多个因素:1. 卫星的轨道设计卫星的轨道设计对卫星导航系统的精度和速度有很大影响。
一般来说,卫星的轨道要足够稳定,以确保系统的准确性和可靠性。
如果卫星轨道发生偏移或不稳定,有可能会导致信号失真或无法接收到信号,进而影响导航的精度和速度。
2. 信号传输的方式和频率卫星导航系统的信号传输通常采用微波技术,其频率一般在1GHz到10GHz之间。
在信号传输过程中,需要考虑信号的传播路径、信号强度、干扰等因素,以确保信号的稳定性和可靠性。
此外,为了满足用户不同的需求,需要对信号传输的方式和频率进行优化,以提高卫星导航系统的应用效率和稳定性。
3. 计算精度和速度卫星导航系统的计算精度和计算速度对其应用效率和可靠性有很大影响。
在计算精度方面,需要考虑卫星的轨道和用户位置等多个因素,以确保计算结果准确无误。
在计算速度方面,需要优化计算算法、提高计算效率,并且需要考虑卫星系统的可扩展性,以保证计算系统能够应对未来的需求。
第46卷第16期 20 1 0年8月 机械工程学报
JOURNAL oF MECHANICAL ENGINEERING V_01.46 NO.16
Aug. 201 0
DoI:10.3901,JM .2010.16.148 纳卫星等效空间热沉的PWM控制及其 在地面模拟试验中的应用研究冰
刘东晓 李运泽2李运华 (1.北京航空航天大学自动化科学与电气工程学院北京 100191; 2.北京航空航天大学航空科学与工程学院北京 100191)
摘要:纳卫星等效空间热沉是一种适用于纳卫星热系统动态特性地面试验研究的空间环境模拟装置,详细阐述纳卫星等效空 间热沉的工作原理,并提出其核心部件热电制冷器(Thermoelectric cooler,TEC)及强迫冷却风扇的脉冲宽度调制(Pulse width modulation,PWM)控制策略及其算法与硬件实现,以此为平台对一模拟纳卫星内部的闭环控温策略进行地面试验研究,结果 表明采用PWM控制的等效空间热沉可以满足在地球表面进行纳卫星空间控温效果研究的目的,为微小航天器热系统的空间 环境模拟试验提供一种新的技术途径。 关键词:纳卫星等效空间热沉热电制冷器强迫冷却风扇脉冲宽度调制控制 中图分类号:V416
PWM Control and Application Research on Ground Simulation Experiment of Equivalent Space Heat Sink for Nano・-satellite
LIU Dongxiao LI Yunze2 LI Yunhua (1.School of Automation Science and Electrical Engineering,Beihang University,Beijing 1 00 1 9 1; 2.School ofAeronautic Science and Engineering,Beihang University,Beijing 100191)
航空航天控制系统设计与仿真研究航空航天控制系统是现代航空航天技术中不可或缺的一部分,它负责飞行器的稳定、导航、操纵以及安全性能的保障。
本文将从控制系统的设计和仿真两个角度进行研究,探讨航空航天控制系统在设计和仿真过程中的关键技术和方法。
一、航空航天控制系统设计航空航天控制系统设计的首要目标是确保飞行器的稳定性和准确性。
设计过程中需要考虑飞行器的特性、环境条件、性能要求等因素。
1. 飞行器特性考虑在航空航天控制系统的设计中,首先要考虑到飞行器的特性。
不同类型的飞行器有不同的特点,例如,飞行器可能是固定翼飞机、直升机、卫星或者火箭。
了解这些特性对于设计出满足要求的控制系统至关重要。
2. 环境条件考虑在设计控制系统时,还需要充分考虑飞行器所处的环境条件,如空气动力学性能、气候状况、地理环境等。
环境条件对于控制系统的设计和性能都有重要影响,在设计中要充分考虑这些因素。
3. 性能要求考虑飞行器控制系统的性能要求是设计的重要依据,它们可能涉及到稳定性、灵敏度、精确度、可靠性等指标。
在设计中需要明确这些要求,并灵活地根据不同的应用场景进行优化。
二、航空航天控制系统仿真研究仿真是现代航空航天控制系统设计不可或缺的一个环节,它能够在实际操作之前对系统进行全面、准确的测试和验证。
以下是关于航空航天控制系统仿真研究的几个关键方面。
1. 硬件仿真硬件仿真是航空航天控制系统仿真的基础,它模拟了控制系统中的各个硬件组件,如传感器、执行器等。
通过硬件仿真可以验证硬件的性能,包括响应速度、准确度等。
2. 软件仿真软件仿真是航空航天控制系统仿真的重要组成部分。
它模拟了控制系统的软件运行过程,能够验证软件的逻辑性、稳定性和鲁棒性等。
软件仿真可以通过多种工具和方法来实现,如MATLAB/Simulink、LabVIEW等。
3. 虚拟仿真虚拟仿真是航空航天控制系统仿真的一种高级形式。
它通过构建虚拟环境和虚拟飞行器来模拟真实的控制系统行为。
第18卷第1期 系统 仿 真 学 报© V ol. 18 No. 12006年1月 Journal of System Simulation Jan., 2006纳型卫星热控系统设计与仿真丁延卫1,2,付俊明2,尤 政2(1.中国科学院 光电研究院,北京 100080;2.清华大学 精密仪器与机械学系,北京 100084)摘 要:现代微小卫星是当前航天技术发展的重要方向之一,热控分系统的功能是为星上仪器设备提供合适的温度环境。
针对一颗纳型卫星,介绍其功能和构成。
以获得最佳热耦合机制为目标,对纳型卫星本体及各分系统进行了全被动热控系统设计。
通过I-DEAS TMG 软件,建立卫星热分析模型,对卫星的在轨稳态和瞬态温度状态上进行了仿真分析。
仿真结果满足卫星总体要求,表明所提出的热设计思想和所采取的热设计措施可行。
关键词:纳型卫星;热设计;仿真;热耦合中图分类号:TP391.9 文献标识码:A 文章编号:1004-731X (2006) 01-0169-04Design and Simulation for Thermal Control System of NanosatelliteDING Yan-wei 1,2, FU Jun-ming 2, YOU Zheng 2(1.Academy of Opto-electronics, The Chinese Academy of Sciences, Beijing 100080, China; 2.Department of Precision Instruments and Mechanics, Tsinghua University, Beijing 100084, China)Abstract: Modern microsatellite and small satellite is one of important aspects of space technology development nowadays, and its thermal control system is to provide appropriate temperature environment for instruments and equipments. The structure and function of a nanosatellite were introduced. Under the optimal thermal coupling mechanism, all-passive thermal design was carried out for nanosatellite system and subsystems. By I-DEAS TMG software, thermal model of the nanosatellite was founded, and the on-orbit steady and transient temperature distributions of nanosatellite were simulated. Temperature data met the need of the mission. Results show that the idea and measures of thermal design for nanosatellite are feasible.Key words: nanosatellite; thermal design; simulation; thermal coupling引 言现代微小卫星已经不是简单的卫星小型化,而是依托高新技术、采用一体化、集成化、模块化、商用器件化以及功能软件化等全新的设计思想和概念、以高“功能密度”为核心的系统小型化。
现代微小卫星技术受到航天、军事、工业以及科研部门的普遍关注,发展迅速,成为当前航天技术发展的重要方向之一[1]。
在微小卫星的各分系统中,热控分系统的功能是为星上仪器设备正常工作提供合适的温度环境[2]。
本文介绍一颗纳型卫星的功能及构成,并对卫星本体及分系统进行热控系统设计和仿真。
1 纳型卫星及其构成微电子技术特别是近年来以微机电系统(MEMS )和微光机电系统(MOEMS )为代表的微米纳米技术的发展,使得微型航天器特别是纳型卫星甚至皮型卫星的实现成为可能。
据资料介绍目前已发射纳型卫星有:俄罗斯航天研究院收稿日期:2004-11-05 修回日期:2005-11-17基金项目:中国博士后科学基金(2003034170)作者简介:丁延卫(1976-), 男, 河南汝阳人, 副研究员, 博士后, 研究方向为光学仪器总体技术、现代微小卫星技术、微/纳传感器技术; 付俊明(1980-), 男, 江西临川人, 博士生, 研究方向为多学科优化设计; 尤政(1964-),男,江苏扬州人,博士,教授,博导,研究方向微/纳技术、光电测试技术、微小卫星技术等。
SPUTNIK-2卫星、美国Aeroastro 的 Bitsy 卫星、美国 Arizona 大学的AUSat 卫星、美国 Stanford 大学的SQUIRT-2卫星、英国Surrey 大学的SNAP-1卫星、美国 Stanford 大学的 PICOSAT 卫星、墨西哥Anahuac 大学的 ANISAT 卫星等。
这种基于微米纳米技术的纳型/皮型卫星给航天技术的发展带来了新的机遇,它将改变人们对航天事业高投入、高风险的传统观念,使更多的科技人员献身与投入航天事业,使更多的新技术更快的应用于航天领域。
目前,纳型/皮型卫星已经在通讯、遥感、电子侦察等领域获得了应用,显示出良好的技术、经济和社会效益[3]。
本文研究的纳型卫星主要由载荷舱、模块盒、太阳电池帆板等部分组成,载荷舱内包含有微惯性组合(MIMU)、电池组、储箱、相机等组件,采用一体化与系统集成的设计方法,总重量小于25kg ,具有对地成像、信息传输等功能。
2 热控中的最佳热耦合机制卫星运行在高真空的太空环境,热传递主要通过传导和辐射进行。
2.1 接触导热的机理与应用接触导热是一个受材料热物性、材料机械特性、材料表面性质以及负载、温度、环境等众多因素影响的非线性问题。
接触导热机理的理论研究包括粗糙表面的微观形貌分析、固体材料的微观形变分析和接触导热分析。
很多情况下,人为2006年1月系统仿真学报 Jan., 2006地增加或者减小接触面间的接触热阻,能够起到改变温度场的功效。
减小接触热阻的主要措施包括:(1)采用当量导热系数和硬度比值大的接触对;(2)在接触界面填充导热系数大、硬度小的金属箔,以增加界面间的实际接触面积;(3)在接触面间填充导热脂;(4)利用载荷的“hysteresis”现象,在使用前对界面实施过度加载等。
增加接触热阻的主要措施包括:(1)在金属表面镀上陶瓷等隔热材料,增加界面隔热效果;(2)在界面间填充硬度较高、粗糙程度较高的金属网格;(3)对于多层绝热结构,对金属层进行绝热粉末预处理等[4]。
2.2 辐射换热的强化与削弱工程上,可以根据需要对辐射换热予以强化或削弱。
强化辐射换热时,可以采取增加换热表面发射率以及改变两表面的布置以增加角系数的方法。
削弱辐射换热时,可以减少表面发射率以在两辐射表面之间安插遮热板的方法[5]。
2.3 最佳热耦合机制思想在纳型卫星的热设计过程中,可以通过利用隔热垫、导热脂以及增加或减小表面发射率、热管、热包覆、散热器等被动热控制措施,并优化这些措施之间的组合,最大限度地满足热控制的需要。
3 热控系统设计3.1 热设计的目的及原则纳型卫星热控设计的目的是通过合理的热设计方法和热控制手段,提供卫星有效载荷和卫星平台各分系统仪器设备正常工作所需的环境温度,同时保证卫星表面所有设备工作在所需的温度范围。
在热设计过程中,遵循以下原则:(1) 采用成熟的热控技术和实施工艺,遵循各项热控规范和标准,力求简单、可靠;(2) 整星热设计本着被动热控方式为主,在被动热控方式不能满足要求时,再考虑电加热补偿的主动热控手段,力求实现最佳热耦合机制;(3) 星内一般仪器设备的温度范围设计余量为±10℃。
3.2 热控制措施综合考虑卫星的结构、温度要求以及所处的空间环境,经过大量的热分析计算,决定采取如下热控制措施:(1) 载荷舱内除推进系统采取特殊的热控制措施外,其他载荷外表面进行发黑处理,ε≧0.80;(2) 模块盒和载荷舱身内表面ε≧0.50;(3) 模块盒内各电路模块与其安装面之间填充导热材料或导热脂;(4) 位于星外的磁强计、GPS天线等的外表面喷涂有机灰漆或有机黑漆,α/ε=0.85/0.80。
4 I-DEAS TMG仿真分析4.1 热分析模型的建立利用IDEAS TMG有限元软件进行分析,该软件具有将模拟空间环境、轨道、姿态、辐射角系数计算等集成在一起的特点,NASA等许多国外航天器研制单位都采用IDEAS TMG软件进行空间飞行器的热分析计算。
在建立有限元分析模型时,采用一定的简化和假设。
(1) 太阳电池帆板以及顶板的材料为铝蜂窝板,用Shell 单元表示两侧的铝蒙皮,在两层Shell单元之间施加相当于铝蜂窝热传导率的热耦合(λ=1.5 W/m.℃)模拟中间的蜂窝夹层,将电池片表面的热参数(α/ε=0.92/0.82)作为帆板向外表面的热参数;(2) 模块盒以及载荷舱的材料为硬铝LY12,用Shell单元建立它们的有限元模型,并施加表面的热参数(α/ε=0.15/0.50),模块盒与模块盒之间、模块盒与载荷舱之间的连接用共用节点的方式模拟;(3) 模块盒内部各电路模块简化为Shell单元,其在模块盒内的安装方式通过与模块盒共用节点的方式模拟,这些Shell单元的材料的热特性为:热传导率λ=10 W/m.℃、表面红外发射率ε=0.80;(4) 载荷舱内的各有效载荷中, 储箱、电池组和动量轮采用Shell单元划分网格,MIMU和相机控制盒壳体采用Shell单元划分网格的同时,其内部电路板也采用Shell单元划分网格,壳体的材料为硬铝LY12,电路板的材料热特性与模块盒内电路模块的材料热特性相同,相机镜头也划作Shell单元;(5) 盖板和推进电路盒壳体采用Shell单元划分网格,材料为硬铝LY12,推进电路盒内电路板也采用Shell单元划分网格,电路板的材料热特性与模块盒内电路模块的材料热特性相同;(6) 对天面的2个磁强计和1个GPS天线用Shell单元划分网格;(7) 除蓄电池、相机控制箱、燃料储箱、MIMU、动量轮外,有效载荷舱内的其余零部件,星箭分离机构的连接法兰、推进系统、RF天线等未包含在计算模型中。