粒子滤波算法研究
- 格式:pdf
- 大小:251.20 KB
- 文档页数:2
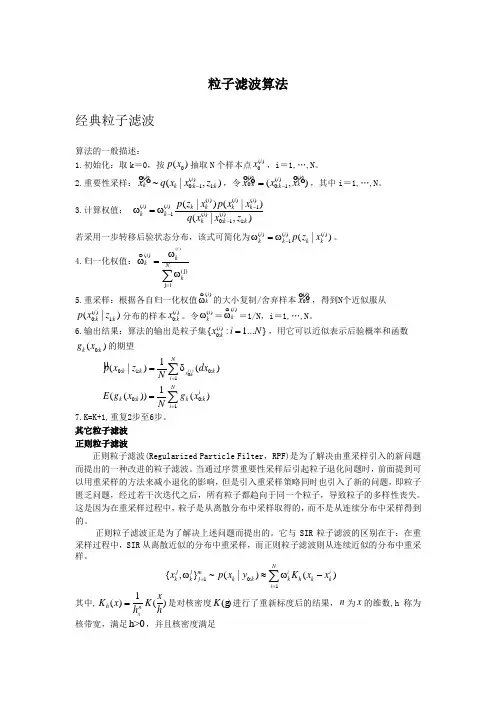
粒子滤波算法经典粒子滤波算法的一般描述:1.初始化:取k =0,按0()p x 抽取N 个样本点()0i x ,i =1,…,N 。
2.重要性采样: ()()0:11:(|,)i i k k k kx q x x z -~,令 ()()()0:0:1(,)i i i k k k x x x -=,其中i =1,…,N 。
3.计算权值: ()()()()()11()()0:11:(|)(|)(|,)i i i i i k k k k kk i i kk k p z x p x x q xxz ---ω=ω若采用一步转移后验状态分布,该式可简化为()()()1(|)i i i k k k k p z x -ω=ω。
4.归一化权值: ()j j i i kk Nk()()=1ωω=ω∑5.重采样:根据各自归一化权值 ()i k ω的大小复制/舍弃样本 ()0:i k x ,得到N 个近似服从()0:1:(|)i k k p x z 分布的样本()0:i k x 。
令()i k ω= ()i k ω=1/N ,i =1,…,N 。
6.输出结果:算法的输出是粒子集()0:{: 1...}i k x i N =,用它可以近似表示后验概率和函数0:()k k g x 的期望0:0:1:0:11(|)()i kNk k k x i p x z dx N()==δ∑0:0:11(())()Nik k k k i E g x g x N==∑7.K=K+1,重复2步至6步。
其它粒子滤波 正则粒子滤波正则粒子滤波(Regularized Particle Filter ,RPF)是为了解决由重采样引入的新问题而提出的一种改进的粒子滤波。
当通过序贯重要性采样后引起粒子退化问题时,前面提到可以用重采样的方法来减小退化的影响,但是引入重采样策略同时也引入了新的问题,即粒子匮乏问题,经过若干次迭代之后,所有粒子都趋向于同一个粒子,导致粒子的多样性丧失。

粒子滤波(PF: Particle Filter)的思想基于蒙特卡洛方法(Monte Carlo methods),它是利用粒子集来表示概率,可以用在任何形式的状态空间模型上。
其核心思想是通过从后验概率中抽取的随机状态粒子来表达其分布,是一种顺序重要性采样法(Sequential Importance Sampling)。
简单来说,粒子滤波法是指通过寻找一组在状态空间传播的随机样本对概率密度函数进行近似,以样本均值代替积分运算,从而获得状态最小方差分布的过程。
这里的样本即指粒子,当样本数量N→∝时可以逼近任何形式的概率密度分布。
尽管算法中的概率分布只是真实分布的一种近似,但由于非参数化的特点,它摆脱了解决非线性滤波问题时随机量必须满足高斯分布的制约,能表达比高斯模型更广泛的分布,也对变量参数的非线性特性有更强的建模能力。
因此,粒子滤波能够比较精确地表达基于观测量和控制量的后验概率分布,可以用于解决SLAM 问题。
粒子滤波的应用粒子滤波技术在非线性、非高斯系统表现出来的优越性,决定了它的应用范围非常广泛。
另外,粒子滤波器的多模态处理能力,也是它应用广泛有原因之一。
国际上,粒子滤波已被应用于各个领域。
在经济学领域,它被应用在经济数据预测;在军事领域已经被应用于雷达跟踪空中飞行物,空对空、空对地的被动式跟踪;在交通管制领域它被应用在对车或人视频监控;它还用于机器人的全局定位。
粒子滤波的缺点虽然粒子滤波算法可以作为解决SLAM问题的有效手段,但是该算法仍然存在着一些问题。
其中最主要的问题是需要用大量的样本数量才能很好地近似系统的后验概率密度。
机器人面临的环境越复杂,描述后验概率分布所需要的样本数量就越多,算法的复杂度就越高。
因此,能够有效地减少样本数量的自适应采样策略是该算法的重点。
另外,重采样阶段会造成样本有效性和多样性的损失,导致样本贫化现象。
如何保持粒子的有效性和多样性,克服样本贫化,也是该算法研究重点。
粒子滤波原理粒子滤波(Particle Filter)是一种非参数实时滤波方法,用于估计目标的状态。
它适用于非线性和非高斯问题,并被广泛应用于机器人感知、目标跟踪、信号处理等领域。
本文将介绍粒子滤波的基本原理、流程和应用。
1. 基本原理粒子滤波的基本原理是根据贝叶斯定理,通过推断目标状态的后验分布来预测目标状态。
具体来说,粒子滤波将目标状态表示为一组粒子,每个粒子代表一种可能的状态。
粒子的数量越多,则对目标后验分布的估计就越准确。
粒子滤波算法的流程如下:(1)初始化粒子集合,即根据先验信息生成一组随机的粒子,并赋予它们相应的权重;(2)接收观测数据,并对每个粒子进行状态转移和权重更新。
状态转移是根据系统模型进行的,对于机器人定位问题,状态转移可以使用运动学方程描述机器人在环境中的运动;权重更新是根据观测模型计算得到的,对于机器人定位问题,权重可以用激光传感器的测量值和地图进行匹配计算;(3)根据粒子的权重进行重采样,生成新的粒子集合。
重采样的目的是为了减小样本的方差,并确保样本的代表性。
(4)重复步骤(2)、(3),直到目标状态的后验分布收敛,或达到设定的迭代次数。
2. 算法改进粒子滤波算法在实际应用中存在一些问题,例如样本退化和计算复杂度高等。
为了解决这些问题,学者们提出了一系列改进算法,主要包括以下几种:串行粒子滤波(Sequential Monte Carlo, SMC)、粒子群优化算法(Particle Swarm Optimization, PSO)、希尔伯特-黄变换粒子滤波(Hilbert-Huang Transform Particle Filter, HHTPF)和变分粒子群优化算法(Variational Particle Swarm Optimization, VPSO)等。
串行粒子滤波算法是一种常用的改进算法,它将原始粒子集合分为若干个子集,在每个子集上执行滤波过程。
通过这种方式,可以减少不必要的计算,提高算法的效率。
粒子滤波方法
粒子滤波(Particle filtering)是一种基于贝叶斯滤波理论的非线性滤波方法,用于解决非线性系统状态估计问题。
粒子滤波通过采样一组粒子来表示概率分布的近似,利用这些粒子进行状态估计和预测。
粒子滤波的基本步骤如下:
1. 初始化:根据先验分布,生成一组初始粒子,并赋予相应的权重。
2. 预测:利用系统模型,根据上一时刻的状态估计和粒子进行状态预测,并按照预测结果更新粒子的状态。
3. 权重更新:根据测量信息,计算每个粒子的权重。
权重的计算通常基于观测模型和预测模型之间的残差。
4. 标准化:将粒子的权重标准化,使得权重之和等于1。
5. 抽样:根据粒子的权重,进行重采样。
重采样时,根据权重大小进行有放回抽样,权重大的粒子有更大的概率被选中。
6. 重复预测和更新:重复进行预测、权重更新、标准化和抽样的步骤,直到达到满足要求的状态估计精度或满足一定的终止条件。
粒子滤波方法的优点在于能够处理非线性和非高斯的系统状态
估计问题,同时也适用于高维状态空间的估计。
然而,粒子滤波也存在一些缺点,如粒子数目的确定以及粒子退化的问题需要注意。
因此,改进的版本如残差重采样算法等被提出来,用于提高算法的效率和精度。
粒子滤波算法
粒子滤波算法(Particle Filtering Algorithm)是一种在最近几年被广泛应用于机器人视觉定位和机器人轨迹跟踪领域的定位技术。
这种算法具有快速、精确、实时等优点,可以帮助机器人及时准确地定位自身位置。
粒子滤波算法的基本原理是建立一个概率分布模型,该模型用于跟踪机器人的位置,它基于一系列计算步骤,主要包括:
1)状态预测步骤:将机器人的上一个位置作为输入,利用状态估计算法(如Kalman滤波)预测机器人的下一个位置,以便在系统中实现实时定位。
2)更新步骤:通过使用环境感知技术(如视觉定位)获取机器人位置的实时反馈信息,进行状态更新,以便更准确地定位机器人的位置。
3)变量步骤:将位置反馈信息转换为概率分布模型,根据模型和其他环境信息,推断出机器人当前位置的变量信息。
4)计算步骤:根据变量信息,计算出机器人当前位置,以及当前位置的置信度,以便决定准确度。
粒子滤波算法具有计算量小、操作简单等优点,可以高效准确地定
位机器人位置,有效提高机器人自主定位能力。
该算法已被广泛应用于机器人定位、轨迹跟踪、室内建图、机器人视觉、导航系统等领域,为机器人智能系统发展做出了重要贡献。
gru粒子滤波算法"GRU粒子滤波算法"这句话指的是使用门控循环单元(GRU)与粒子滤波算法相结合的方法。
首先,我们来了解一下相关的概念:1.GRU:门控循环单元(GRU)是一种循环神经网络(RNN)的变体,用于处理序列数据。
与传统的RNN相比,GRU具有更少的参数和更简单的结构,能够更好地捕捉序列中的长期依赖关系。
2.粒子滤波算法:粒子滤波是一种基于蒙特卡罗方法的递归贝叶斯滤波算法,用于估计一个动态系统的状态。
它通过随机采样和重采样技术,从一组代表系统状态的粒子中估计状态变量的后验概率分布。
将GRU与粒子滤波算法相结合,可以利用GRU对序列数据的处理能力,以及粒子滤波算法在非线性、非高斯系统中的估计性能。
这种结合的方法可以应用于各种领域,如目标跟踪、语音识别、自然语言处理等。
以下是一些使用GRU与粒子滤波算法结合的示例:1.目标跟踪:在目标跟踪问题中,可以使用GRU来捕捉目标的运动模式,并使用粒子滤波算法估计目标的轨迹和状态。
通过结合GRU和粒子滤波算法,可以更好地处理目标的非线性运动和动态变化。
2.语音识别:在语音识别任务中,可以使用GRU来捕捉语音信号的时间依赖性,并使用粒子滤波算法对语音特征进行跟踪和识别。
这种方法可以处理语音信号的非线性特性和噪声干扰。
总结来说,"GRU粒子滤波算法"是指将门控循环单元(GRU)与粒子滤波算法相结合的方法。
这种结合可以利用GRU对序列数据的处理能力,以及粒子滤波算法在非线性、非高斯系统中的估计性能。
通过结合这两种算法,可以应用于各种领域,如目标跟踪、语音识别、自然语言处理等。