目标检测目标跟踪报告课件(PPT 85页)
- 格式:ppt
- 大小:3.72 MB
- 文档页数:85

第二章运动目标监测和跟踪2.1运动目标检测运动目标检测(Motion Detection)是指在输入视频图像中判断与背景图像相比是否存在相对运动的前景目标和物体,并根据灰度、边缘、纹理等二维图像特征将运动前景进一步分割为若干独立目标。
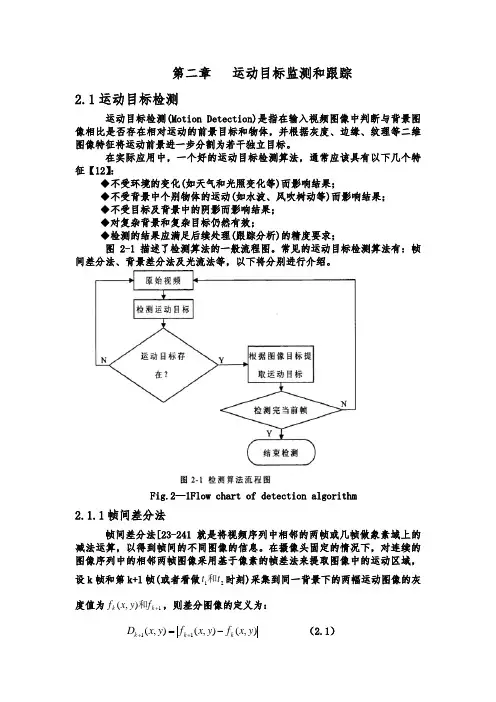
在实际应用中,一个好的运动目标检测算法,通常应该具有以下几个特征【12】:◆不受环境的变化(如天气和光照变化等)而影响结果;◆不受背景中个别物体的运动(如水波、风吹树动等)而影响结果;◆不受目标及背景中的阴影而影响结果;◆对复杂背景和复杂目标仍然有效;◆检测的结果应满足后续处理(跟踪分析)的精度要求;图2-1描述了检测算法的一般流程图。
常见的运动目标检测算法有:帧间差分法、背景差分法及光流法等,以下将分别进行介绍。
Fig.2—1Flow chart of detection algorithm2.1.1帧间差分法帧间差分法[23-241就是将视频序列中相邻的两帧或几帧做象素域上的减法运算,以得到帧间的不同图像的信息。
在摄像头固定的情况下,对连续的图像序列中的相邻两帧图像采用基于像素的帧差法来提取图像中的运动区域,设k 帧和第k+l 帧(或者看做21t t 和时刻)采集到同一背景下的两幅运动图像的灰度值为1),(+k k f y x f 和,则差分图像的定义为:),(),(),(11y x f y x f y x D k k k -=++ (2.1)对上式的差分结果进行阈值处理,就可以提取出运动物体。
对差分图像),(y x f d 二值化,当某一像素的灰度值大于给定阈值T 时,认为该像素为目标像素,即该像素属于运动目标;反之,则属于背景。
这一步的目的就是为了区分背景像素和目标像素,得到:T y x D T y x D k k k y x R >≤+++=),(),(10111{),( (2.2)其中,l 表示前景像素值,0表示背景像素值。
然后再对),(1y x R k +进行连通性分析,就可以得到连通区域的面积。