SIMULINK--面向DSP的自动代码生成(精)
- 格式:doc
- 大小:1001.00 KB
- 文档页数:20
simulink 生成FPGAip步骤
Simulink是一款功能强大的工具,可以用于生成FPGA IP核。
下面将介绍如何使用Simulink来生成FPGA IP的步骤。
打开Simulink并创建一个新的模型。
在模型中添加所需的组件和功能模块,包括输入、输出、算法等。
确保所有组件都按照设计要求进行连接和设置。
接下来,对模型进行仿真和验证。
通过运行仿真,可以验证模型的正确性和功能性。
确保模型能够按照预期工作并生成正确的输出。
然后,将模型转换为HDL代码。
在Simulink中,可以使用HDL Coder来生成Verilog或VHDL代码。
在HDL Coder中选择相应的目标设置,并生成HDL代码。
接着,进行综合和实现。
将生成的HDL代码综合到目标FPGA芯片上,并进行实现。
这一步需要使用FPGA开发工具,如Vivado或Quartus。
在开发工具中导入生成的HDL代码,进行综合和布局布线,并生成bitstream文件。
将生成的bitstream文件下载到目标FPGA芯片上进行验证。
通过连接FPGA开发板,将bitstream文件下载到FPGA芯片上,并验证IP 核的功能和性能。
总的来说,使用Simulink生成FPGA IP的步骤包括创建模型、验证
模型、生成HDL代码、综合实现和验证。
通过这些步骤,可以快速高效地生成FPGA IP核,并在FPGA芯片上进行验证和部署。
Simulink提供了强大的工具和功能,使得生成FPGA IP变得更加简单和方便。
希望以上内容对您有所帮助。
Simulink转C代码一、生成C代码。
1.首先建立模型。
2.为每根信号线取名字(与输入输出口的名字相同)。
3.为表格、常量等数据赋值(可通过变量)。
检验模型是否能够运行,能够正常运行时转代码的前提。
4.通过data object wizard的find,check all,mpt,package,create命令封装数据。
5.通过model explorer修改输入输出数据的类型(单片机中运行时,设定为(u)int8,(u)int16类型,可以采用继承属性Inherit: auto。
)。
注意包含Base workspace和自己模型下面的数据都要设定类型。
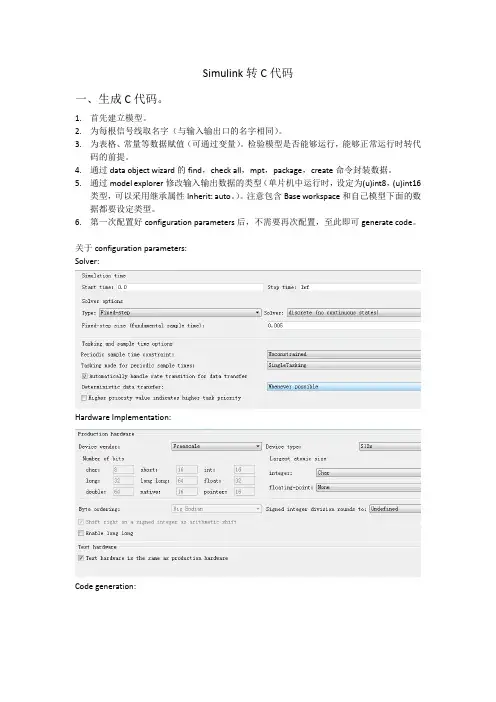
6.第一次配置好configuration parameters后,不需要再次配置,至此即可generate code。
关于configuration parameters:Solver:Hardware Implementation:Code generation:Report:Comments:Templates:(图中的code templates是来自锡柴的,用simulink自带的templates也可以)二、集成到目标代码里(针对codewarrior编译器)。
1.在sources文件下新建文件RTW,将生成的xxx_ert_rtw和slprj\ert\_sharedutils文件下的.c 和.h文件全部放进RTW中。
2.在codewarrior中添加RTW文件。
3.在初始化中定义输入输出数据并外部声明(BP_Var_Initial.h,BP_Var_Extern.h中)。
4.为实现标定功能,将标定数据(表格等)放在RAM和Flash中。
●将生成的数据定义和声明屏蔽掉。
●在Cal_Ram.h和Cal_Flash.h中分别定义变量,在Cal_Ram_Extern.h和Cal_Flash_Extern.h中进行外部声明。
放在Flash中的数据可为变量添加后缀_Flash。
simulink中generated s-function模块例子-概述说明以及解释1. 引言1.1 概述在Simulink中,Generated S-Function模块是一种使用C或C++代码编写的自定义S-Function模块。
这种模块可以提供更高的灵活性和功能,以满足用户对模块行为的特定需求。
通过Generated S-Function 模块,用户可以在Simulink中实现自定义的算法、接口和功能,从而扩展Simulink的能力和应用范围。
本文将介绍Generated S-Function模块的基本概念和原理,以及如何在Simulink中应用这种模块。
读者将了解到Generated S-Function 模块的创建和使用方式,以及如何利用它来构建更复杂和灵活的模型。
通过本文的学习,读者将掌握一种新的Simulink模块开发技术,拓展自己在模拟仿真领域的能力和见识。
1.2 文章结构本文主要分为引言、正文和结论三个部分。
在引言部分,将介绍Simulink中Generated S-Function模块的概念和意义,以及文章的目的和结构安排。
在正文部分,将首先介绍Simulink的基本知识,包括其概述和使用方法,然后详细解释Generated S-Function模块的概念和应用场景,以及如何在Simulink中进行相关设置和调用。
在结论部分,将对全文进行总结,展望Generated S-Function模块在未来的应用前景,并提出一些相关的结束性文字。
1.3 目的:本文旨在介绍Simulink中Generated S-Function模块的使用方法,并通过一个实际的例子来演示如何创建和应用Generated S-Function模块。
通过本文的阅读,读者将了解Generated S-Function模块的基本概念、原理和应用场景,帮助他们更好地利用Simulink工具进行建模和仿真工作。
同时,本文也旨在激发读者的兴趣,引导他们深入学习和探索Generated S-Function模块在实际工程中的应用,从而提高工程设计的效率和精度。
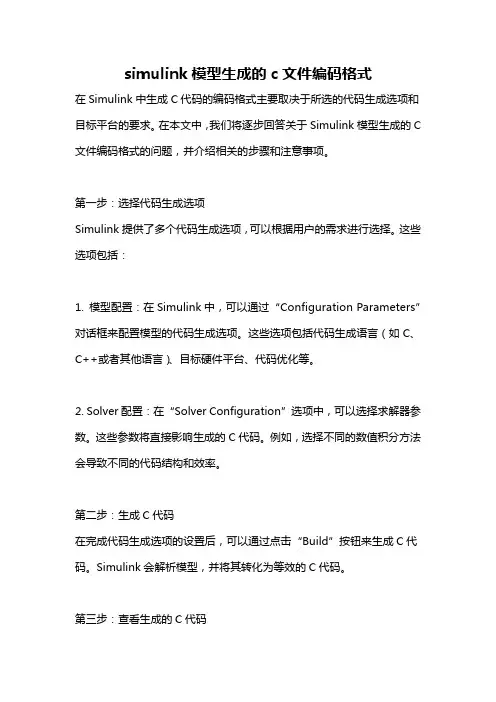
simulink模型生成的c文件编码格式在Simulink中生成C代码的编码格式主要取决于所选的代码生成选项和目标平台的要求。
在本文中,我们将逐步回答关于Simulink模型生成的C 文件编码格式的问题,并介绍相关的步骤和注意事项。
第一步:选择代码生成选项Simulink提供了多个代码生成选项,可以根据用户的需求进行选择。
这些选项包括:1. 模型配置:在Simulink中,可以通过“Configuration Parameters”对话框来配置模型的代码生成选项。
这些选项包括代码生成语言(如C、C++或者其他语言)、目标硬件平台、代码优化等。
2. Solver配置:在“Solver Configuration”选项中,可以选择求解器参数。
这些参数将直接影响生成的C代码。
例如,选择不同的数值积分方法会导致不同的代码结构和效率。
第二步:生成C代码在完成代码生成选项的设置后,可以通过点击“Build”按钮来生成C代码。
Simulink会解析模型,并将其转化为等效的C代码。
第三步:查看生成的C代码生成的C代码将存储在指定的输出文件夹中。
打开该文件夹,可以找到与Simulink模型对应的C文件和相关的头文件。
第四步:理解C代码的结构生成的C代码通常包括以下几个部分:1. 主函数(main function):该函数是程序入口,用于初始化模型和设置所需的参数。
主函数通常包含循环,用于调用模型的求解函数,以实现模型的实时仿真。
2. 模型初始化函数(model initialization function):该函数用于初始化模型的状态变量和其他必要的变量。
这个函数只在程序启动时调用一次。
3. 求解函数(solve function):该函数是模型的核心部分,实现数值积分和状态更新等算法。
根据模型配置选项的不同,求解函数的形式和实现方式也会有所不同。
4. 数据结构和全局变量:为了方便C代码的实现,Simulink会自动生成相应的数据结构和全局变量。
simulink技巧Simulink 是一种用于建立、模拟和分析动态系统的图形化环境,它是 MATLAB 软件的一部分。
Simulink 提供了一个可视化的方式来设计、建模和仿真复杂的系统,它使用模块化的组件和连线来表示系统的不同部分,并提供了丰富的工具和函数库来进行各种分析和优化。
在这篇文章中,我将向您介绍一些 Simulink 的技巧,帮助您更好地使用这个强大的工具。
1. 知晓 Simulink 中的常用快捷键:使用快捷键可以大大提高工作效率。
以下是一些常用的快捷键:- Ctrl + N:创建一个新模型。
- Ctrl + S:保存当前模型。
- Ctrl + E:打开 Simulink 模型浏览器。
- Ctrl + D:对选定的区块进行复制。
- Ctrl + R:对选定的区块进行重命名。
2. 使用 MATLAB 脚本来自动生成 Simulink 模型:您可以使用MATLAB 脚本来自动创建和配置 Simulink 模型。
这对于大型或重复的模型非常有用。
您只需编写一个 MATLAB 脚本,该脚本会生成所需的模型及其参数。
3.使用模型引用来管理模块库:如果您有多个使用相同组件的模型,可以使用模型引用来管理这些模型。
模型引用允许您在多个模型之间共享和复用模块,当您更新模块时,所有使用该模块的模型都将自动更新。
4. 使用控制器区块来简化系统的控制:Simulink 提供了许多预定义的控制器模块,如 PID 控制器、状态反馈控制器等。
使用这些控制器模块可以简化系统的控制逻辑,并缩短开发时间。
5. 使用多线程仿真以加快仿真速度:Simulink 允许您将一个模型拆分为多个子系统,并在多个 CPU 核心上并行运行这些子系统。
通过使用多线程仿真,您可以加快仿真速度,并更快地获得结果。
6.使用状态流图进行离散事件建模:如果您的系统包含离散事件,如消息传递、状态切换等,那么使用状态流图来建模可能更合适。
状态流图提供了一种清晰可见的方式来描述系统的状态和状态之间的转换。
simulink转换为matlab代码
Simulink转换为MATLAB代码
Simulink是一种用于模拟和仿真各种机械系统的建模和仿真软件。
它支持多种不同的仿真工具,如状态空间,传递函数,时域仿真,非线性系统和控制系统。
在很多应用场景中,Simulink模型可能非常复杂,导致仿真变得很慢,而且很难控制。
因此,将Simulink转换为MATLAB代码可以显著提高系统的执行效率,并允许用户对其进行更多的控制、调试和研究。
MATLAB有一种功能叫做“Simulink Coder”,它可以将Simulink 模型转换为C和C++代码,从而减少系统执行时间。
首先,您需要在Simulink模型中定义或添加一些输入和输出变量,以及一些必要的参数。
然后,点击Simulink中的“Code Generation”工具,其中包含一个名为“Simulink Coder”的子工具集,可以帮助您将模型转换为C或C++代码。
然后,您可以使用“Simulink Coder”来指定模型的参数,隔离输入,输出变量,以及生成的代码文件。
一旦完成此操作,Simulink Coder将生成一个包含模型的C或C++代码文件,您可以在MATLAB中使用。
因此,只需简单地将Simulink模型导出到MATLAB,便可以使用MATLAB代码运行模型。
尽管有一些限制,但这种转换仍然是一种非
常有效的工具,可以帮助您更快地模拟和测试您的系统。
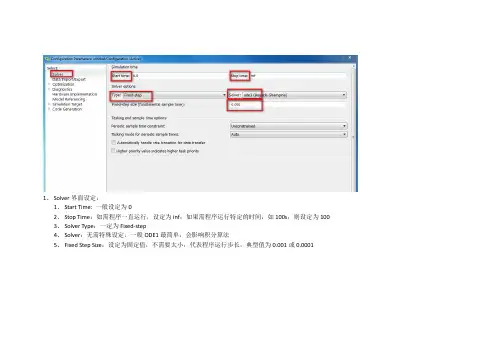
1、Solver界面设定:
1、Start Time: 一般设定为0
2、Stop Time:如需程序一直运行,设定为inf;如果需程序运行特定的时间,如100s,则设定为100
3、Solver Type:一定为Fixed-step
4、Solver:无需特殊设定,一般ODE1最简单,会影响积分算法
5、Fixed Step Size:设定为固定值,不需要太小,代表程序运行步长,典型值为0.001或0.0001
2、优化界面设定:
1、Block reduction:勾选去掉
2、Conditional input branch execution:勾选去掉
3、信号参数界面设定:
1、Inline parameters:勾选去掉
2、Signal Storage reuse:勾选去掉
4、代码生成界面设定:
1、System Target file:选择相应硬件板卡的tlc文件,如硬件为DS1103,就选择RTI1103.TLC
5、仿真选项界面设定:
1、initial simulation state:程序下载后初始状态设定,可在RUN,PAUSE,STOP中选择
2、task configuration:任务配置设定,处理simulink模型中不同任务的优先级,overrun设定等细节
6、下载选项设定:
1、load application after build:模型编译后自动下载。
该选项需从matlab环境寻找注册的硬件信息,但大部分情况下编译时不会连接硬件。
不建议自动下载,勾选去掉。
Simulink Coder是MATLAB的一个附加工具箱,用于将Simulink模型自动转换为可执行代码。
以下是Simulink Coder用户使用手册的基本步骤:1. **创建或打开Simulink模型**:首先,您需要创建一个新的Simulink模型或者打开一个已经存在的模型。
您可以在MATLAB的Simulink编辑器中完成这个步骤。
2. **配置模型参数**:在生成代码之前,您需要配置模型的参数。
这包括选择算法,设置数据类型,配置模型精度等。
这些参数的设置将会影响生成代码的质量和大小。
3. **生成C代码**:在Simulink Coder中,您可以通过选择“C/C++”菜单下的“生成代码”选项来生成C代码。
在生成代码之前,您需要指定代码的输出目录和名称。
4. **验证生成的代码**:生成的代码需要经过验证以确保其正确性和可靠性。
Simulink Coder提供了一些工具和选项来验证生成的代码,例如使用Simulink Coder的验证器或者使用第三方工具进行代码审查。
5. **优化生成的代码**:生成的代码可能需要进行优化以提高其性能或者减小其大小。
Simulink Coder提供了一些工具和选项来优化生成的代码,例如使用Simulink Coder的优化器或者手动修改代码。
6. **部署生成的代码**:最后,您可以将生成的代码部署到目标系统上。
这可能需要一些额外的步骤,例如配置目标系统的硬件和软件环境,编写用户手册等。
以上是Simulink Coder用户使用手册的基本步骤。
在使用SimulinkCoder时,请务必参考最新的官方文档以获取最准确和最详细的信息。
simulink基本模块的使用Simulink是一种强大的仿真和建模工具,常用于开发控制系统、信号处理和通信系统等。
本文将一步一步介绍Simulink的基本模块的使用,并讨论它们在不同领域中的应用。
一、Simulink基础知识在开始介绍基本模块之前,我们需要了解Simulink的一些基础知识。
Simulink是MATLAB软件的一个附加模块,用于建立模型以及执行仿真。
Simulink模型是由各种模块组成的,这些模块通过连线连接在一起,形成一个图形化的仿真模型。
它使用图形化界面,使用户能够直观地构建和修改模型。
二、Simulink基本模块1. 恒定值(constant)模块:恒定值模块用于生成恒定的信号,其输出值不会改变。
在模型中,我们可以通过恒定值模块设置输入信号的初始值、幅值以及一些其他属性。
该模块常用于生成常数信号,如直流电压或恒定的参考信号。
2. 脉冲(gain)模块:脉冲模块将输入信号的幅值乘以一个常数增益,然后输出结果。
通过改变增益系数,可以调整输出信号的幅值。
该模块常用于放大或缩小信号的幅值。
3. 积分器(integrator)模块:积分器模块对输入信号进行积分,并输出积分值。
积分器模块用于对信号进行数值积分操作,可用于控制系统中的积分环节,如PID控制器中的积分环节。
4. 微分器(derivative)模块:微分器模块对输入信号进行微分计算,并输出结果。
微分器模块适用于需要对信号进行微分操作的场景,如滤波器设计和导数控制器。
5. 比例积分微分(PID)控制器模块:PID控制器模块是Simulink中非常重要的一个模块,它结合了前面介绍的比例、积分和微分模块,实现了闭环控制。
PID控制器模块根据输入信号和误差信号生成控制信号,以实现期望输出。
该模块在自动控制系统中应用广泛。
6. 转换器(Switch)模块:转换器模块根据输入信号的值和条件判断,选择输出信号的路径。
该模块可以用于实现逻辑判断,选择不同的信号传递路径。
第7章高级仿真概念本章介绍Simulink仿真中的某些重要概念,它们对于获得准确的仿真结果具有非常重要的意义,本章的主要内容包括:过零检测什么是过零检测,过零检测的工作方式以及如何在Simulink中启动过零检测处理代数循环什么是Simulink中的代数循环,如何设置代数循环高级积分器如何利用积分器重置功能将积分器模块设置为不同的值仿真参数的高级选项如何利用仿真参数对话框设置仿真错误诊断设置和仿真性能优化设置第7章高级仿真概念 1437.1 过零检测在进行动态系统仿真时,Simulink利用过零检测来检查每个时间步上系统状态变量的不连续性,如果Simulink在当前时刻检测到不连续,它会确定不连续状态出现的准确时刻,并在该时刻的前后选取另外的时间步求取仿真结果,这一部分就介绍过零检测的重要性以及过零检测的工作方式。
7.1.1 过零检测的工作方式状态变量中的不连续常常表征了动态系统的重要事件。
例如,当弹球撞击地板时,撞击的位置是不连续的。
由于不连续性常常表示动态系统的一个重大改变,因此对不连续点进行精确仿真是非常重要的,否则,仿真可能会导致错误的结论。
还以仿真小弹球为例,如果在两次仿真步之间小球撞击了地板,那么被仿真的小球在半空中就会翻转方向,这就会使研究人员对小球的物理运动得出错误的结论。
为了避免这样的错误,对不连续点进行仿真是非常重要的,当然,完全依赖仿真算法来确定仿真时间是不能满足这样的要求的。
以定步长算法为例,定步长算法在固定步长的整数倍时刻计算状态变量的值,但是,谁也不能保证不连续点的出现时刻就在定步长的整数倍时刻,用户也可以减小步长以增大撞击到不连续点的可能性,但这无疑会增加仿真的执行时间。
这样看来,变步长算法似乎可以解决这样的问题。
变步长算法会动态地调整步长,当状态变量变化缓慢时增大步长,而当变量变化快速时减小步长,在不连续点处,变量的变化是非常迅速的,这样,从理论上来说,变步长算法应该可以准确地找到不连续点,问题是定位不连续点的精确性。
MATLAB控制系统仿真与嵌入式系统算法设计(原创)2009-01-2213:25:25|分类:嵌入式系统与MATL|字号订阅摘要:在控制类产品设计中,从仿真到工程实现一直是工程师追求的目标,本文将用几个实列来讨论这一过程,因为相当一部分工程师对单片机系统、Keil比较熟练,因此我采用对项目Simulink建模仿真后,就如何生成C代码,然后配合Keil 环境,从而以很小的工作代价把一些复杂的算法集成到单片机系统或嵌入式系统里运行,例子中包含有查询表、信号处理、模糊控制、神经网络、PID控制算法等。
我将一个一个列子的来叙述.关键词:模糊控制、查询表1.引言2.在Simulink环境下把查询表转化为8051兼容C代码在我的文章如何在MATLAB下把模糊推理系统转化为查询表(原创)里,已获得一水位模糊控制系统的查询表模型名叫Fuzzylookup,样子如下:图1-1模糊逻辑生成的查询表模型2.1设置Real-Time Workshop环境点击Simulink\Tools\Real-Time Workshop\Options…,图1-2Real-Time Workshop设置1在上图的设置窗中,选择Real-Time Workshop项按上图设置,设置好后,选择Hardware Implement…,设置如下,点击Apply。
图1-3Real-Time Workshop设置2选择Solver项,设置如下,点击Apply。
图1-4Real-Time Workshop设置31.2生成8051兼容C代码并查看生成报告点击Simulink\Tools\Real-Time Workshop\Build Model…,过几秒后,看到代码生成报告如下样子的界面:图1-5Real-Time Workshop代码生成报告1.3把生成8051兼容C代码放入Keil环境里编译成51可执行的代码在Keil下创建一个项目,命名为LookupTable.Uv2,把上一步生成的所有代码文件拷贝到与LookupTable.Uv2同一个目录下,这个例子中需要把rtlibsrc.h从MATLAB安装目录下搜查出来也考到这个目录下,然后在Keil环境内,打开LookupTable.Uv2项目,把以上文件全部添加到Source Group1内,样子如下:图1-6Real-Time Workshop生成的代码导入Keil里1.4稍修改生成的51代码和设置Keil环境为编译做准备.修改代码和设置Keil环境的目的是让Keil能顺利编译文件,并能运行程序做测试,下面是代码修改的几个地方。
从Matlab-Simulink生成易读可重用代码从Matlab Simulink生成易读可重用代码by: 吴少风MATLAB提供从MATLAB代码或simulink模型生成C/C++代码的功能。
从MATLAB 2011b版开始,MATLAB将代码生成Coder作为单独模块发布。
MATLAB每年更新两次,经过不断完善,新版本的Coder功能更强大。
用MATLAB生成C/C++代码具有MATLAB Coder、Simulink Coder、Embedded Coder三个功能模块,MATLAB Coder从MATLAB 代码生成代码,Simulink Coder从Simulink模型生成代码,Embedded Coder结合MATLAB Coder和Simulink Coder,生成嵌入式代码。
利用代码生成功能,可以快速从模型生成可靠的代码,应用越来越广泛。
要生成易于阅读、重用性好的代码,必须进行详细设置。
文中内容以易读、可重用为目标,建立嵌入式代码生成的演示模型,了解Simulink 代码生成相关工具,介绍详细设置步骤,最终生成容易阅读、可重用代码,供单处理器单任务实时嵌入式系统应用。
文中的方法为严格控制生成代码的个人总结。
以文档呈现,方便自己今后查看,也希望能为其他人提供一些方便。
1.简单示例本部分搭建一个简单的PI控制器模型,示范模型建立、设置、生成代码的详细步骤。
1)新建嵌入式代码生成模型,MATLAB->simulink,New / Embedded Coder / Code Generation System。
不选择一般simulink模板,可减少模型配置参数的设置。
2)搭建如错误!未找到引用源。
所示简易模型,保存文档,设置文件名。
图 1. 一个简单示例模型3)点击工具栏图标,设置模型配置参数,应用并保存。
对嵌入式应用,固定步4)5)interface: 设置整个模型生成代码的接口。