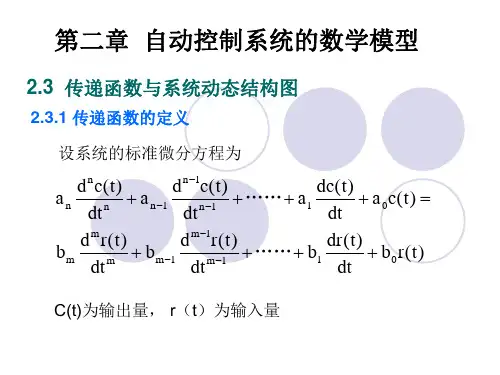
控制系统设计 第二章 输入信号和跟踪误差
- 格式:ppt
- 大小:969.50 KB
- 文档页数:16
伺服系统中如何实现跟踪误差控制伺服系统是指在工业自动化、机器人等领域中使用的一种控制系统,其功能是将输出信号稳定在给定的目标值附近。
然而,在实际的应用中,由于各种因素的影响,伺服系统实现精确控制时仍会出现误差。
跟踪误差是指实际输出信号与目标值之间的差异,是伺服系统中需要解决的一个重要问题。
本文将介绍在伺服系统中如何实现跟踪误差控制。
一、PID 控制器PID 控制器是一种经典的控制器,常用于伺服系统中。
PID 控制器通过反馈实际输出信号与目标值之间的误差,并根据误差的大小产生控制信号,调节输出信号的值。
其中,P 代表比例项,I 代表积分项,D 代表微分项。
在PID控制器中,比例项用来校正已知误差的百分比;积分项用来校正剩余误差;微分项用来弥补响应速度不够快引起的超调或不稳定问题。
PID控制器可以通过不断调整参数来达到较好的控制效果,是控制伺服系统跟踪误差的一种常用方法。
二、模型预测控制模型预测控制 (MPC) 在伺服系统中也是一种常用的方法。
模型预测控制是一种基于模型的控制策略,通过对系统的预测建模,计算多个时间点的控制量,以优化控制信号的效果。
MPC 利用系统的预测模型对运动趋势进行预测,然后再综合考虑跟踪误差和控制输入的平衡,计算最优的输出信号。
采用 MPC 控制器能够通过对输出信号和状态变量的预测来控制系统,从而在一定程度上减小跟踪误差的大小。
三、自适应控制在实际的应用中,系统参数的变化可能会导致跟踪误差的大小发生变化。
在这种情况下,自适应控制是一种有效的跟踪误差控制方法。
自适应控制是一种可以自动检测系统参数变化并及时响应的控制方法,通过对系统模型的在线更新来实现系统对参数变化的自适应。
自适应控制能够自动跟踪系统的参数,使得伺服系统可以通过自主学习动态模型参数,实现更加准确的跟踪误差控制。
综上所述,PID 控制器、模型预测控制和自适应控制都是常用的跟踪误差控制方法,其原理和适用情况各有不同。