最短路径的算法标号法
- 格式:ppt
- 大小:4.36 MB
- 文档页数:111

最短路径问题算法最短路径问题算法概述:在图论中,最短路径问题是指在一个加权有向图或无向图中,从一个顶点出发到另外一个顶点的所有路径中,权值和最小的那条路径。
最短路径问题是图论中的经典问题,在实际应用中有着广泛的应用。
本文将介绍常见的几种最短路径算法及其优缺点。
Dijkstra算法:Dijkstra算法是一种贪心算法,用于解决带权有向图或无向图的单源最短路径问题,即给定一个起点s,求出从s到其他所有顶点的最短路径。
Dijkstra算法采用了广度优先搜索策略,并使用了优先队列来维护当前已知的距离最小的节点。
实现步骤:1. 初始化:将起始节点标记为已访问,并将所有其他节点标记为未访问。
2. 将起始节点加入优先队列,并设置其距离为0。
3. 重复以下步骤直至队列为空:a. 取出当前距离起始节点距离最小的节点u。
b. 遍历u的所有邻居v:i. 如果v未被访问过,则将其标记为已访问,并计算v到起始节点的距离,更新v的距离。
ii. 如果v已被访问过,则比较v到起始节点的距离和当前已知的最短距离,如果更小则更新v的距离。
c. 将所有邻居节点加入优先队列中。
优缺点:Dijkstra算法能够求解任意两点之间的最短路径,并且保证在有向图中不会出现负权回路。
但是Dijkstra算法只适用于无负权边的图,因为负权边会导致算法失效。
Bellman-Ford算法:Bellman-Ford算法是一种动态规划算法,用于解决带权有向图或无向图的单源最短路径问题。
与Dijkstra算法不同,Bellman-Ford算法可以处理带有负权边的图。
实现步骤:1. 初始化:将起始节点标记为已访问,并将所有其他节点标记为未访问。
2. 对于每个节点v,初始化其到起始节点s的距离为正无穷大。
3. 将起始节点s到自身的距离设置为0。
4. 重复以下步骤n-1次(n为顶点数):a. 遍历所有边(u, v),如果u到起始节点s的距离加上(u, v)边权小于v到起始节点s的距离,则更新v的距离为u到起始节点s的距离加上(u, v)边权。

顶点标数法1. 概述顶点标数法(vertex counting method)是一种用于解决图论中最短路径问题的算法。
在图论中,最短路径问题是指在一个带有权重的图中,找出两个给定顶点之间的最短路径。
顶点标数法通过为每个顶点分配一个标记,以确定从起点到其他顶点的最短路径。
本文将详细介绍顶点标数法的原理、算法步骤以及应用场景。
2. 原理2.1 图的表示在使用顶点标数法解决最短路径问题之前,首先需要了解如何表示一个图。
通常,图可以使用邻接矩阵或邻接表表示。
•邻接矩阵:使用一个二维矩阵来表示图的连接关系,其中矩阵的行和列分别表示图中的各个顶点,矩阵元素的值表示相邻顶点之间是否有连接边,若有边则为边的权重,若无边则为无穷大。
•邻接表:使用一个数组加上一组链表来表示图的连接关系,数组的每个元素表示一个顶点,而链表则表示该顶点与其他顶点的连接关系,链表节点中包含连接的顶点以及边的权重。
2.2 标号与标记在顶点标数法中,每个顶点都会被分配一个标号或标记,用于表示从起点到该顶点的最短路径的长度。
一般情况下,起点的标号为0,其余顶点的标号初始化为无穷大。
2.3 松弛操作松弛操作是顶点标数法中最核心的操作之一,用于更新两个顶点之间的最短路径。
具体操作是,对于每条边(u, v)的权重w,如果从起点到顶点u的已知最短路径长度d[u]加上边的权重w小于从起点到顶点v的已知最短路径长度d[v],则更新d[v]为d[u] + w,同时记录经过顶点v的前一个顶点pre[v]为u。
2.4 算法步骤顶点标数法的算法步骤如下:1.初始化起点标号为0,其余顶点标号为无穷大。
2.初始化已知最短路径长度的顶点集合S为空。
3.选择起点标号最小的顶点u,将其加入S。
4.对于u的每个邻接顶点v,进行松弛操作。
5.从剩余顶点中选择标号最小的顶点u加入S,重复步骤4,直到所有顶点都加入S。
6.根据pre数组回溯得到最短路径。
3. 应用场景顶点标数法在实际应用中具有广泛的用途,以下是一些常见的应用场景:3.1 网络路由在计算机网络中,路由器需要通过选择最短路径来转发数据包。
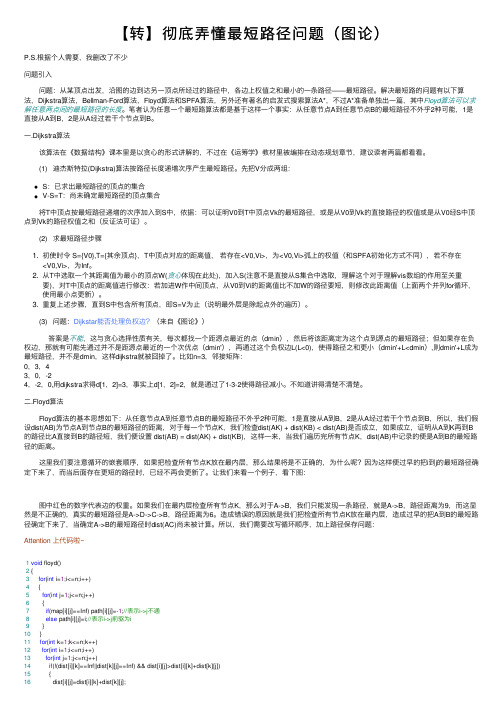
【转】彻底弄懂最短路径问题(图论)P.S.根据个⼈需要,我删改了不少问题引⼊问题:从某顶点出发,沿图的边到达另⼀顶点所经过的路径中,各边上权值之和最⼩的⼀条路径——最短路径。
解决最短路的问题有以下算法,Dijkstra算法,Bellman-Ford算法,Floyd算法和SPFA算法,另外还有著名的启发式搜索算法A*,不过A*准备单独出⼀篇,其中Floyd算法可以求解任意两点间的最短路径的长度。
笔者认为任意⼀个最短路算法都是基于这样⼀个事实:从任意节点A到任意节点B的最短路径不外乎2种可能,1是直接从A到B,2是从A经过若⼲个节点到B。
⼀.Dijkstra算法该算法在《数据结构》课本⾥是以贪⼼的形式讲解的,不过在《运筹学》教材⾥被编排在动态规划章节,建议读者两篇都看看。
(1) 迪杰斯特拉(Dijkstra)算法按路径长度递增次序产⽣最短路径。
先把V分成两组:S:已求出最短路径的顶点的集合V-S=T:尚未确定最短路径的顶点集合将T中顶点按最短路径递增的次序加⼊到S中,依据:可以证明V0到T中顶点Vk的最短路径,或是从V0到Vk的直接路径的权值或是从V0经S中顶点到Vk的路径权值之和(反证法可证)。
(2) 求最短路径步骤1. 初使时令 S={V0},T={其余顶点},T中顶点对应的距离值,若存在<V0,Vi>,为<V0,Vi>弧上的权值(和SPFA初始化⽅式不同),若不存在<V0,Vi>,为Inf。
2. 从T中选取⼀个其距离值为最⼩的顶点W(贪⼼体现在此处),加⼊S(注意不是直接从S集合中选取,理解这个对于理解vis数组的作⽤⾄关重要),对T中顶点的距离值进⾏修改:若加进W作中间顶点,从V0到Vi的距离值⽐不加W的路径要短,则修改此距离值(上⾯两个并列for循环,使⽤最⼩点更新)。
3. 重复上述步骤,直到S中包含所有顶点,即S=V为⽌(说明最外层是除起点外的遍历)。

无权图的最短路径算法无权图是指图中的每条边都没有权值,也就是说从一个节点到另一个节点的距离都是相等的。
在无权图中找到最短路径是一个常见的问题,它在许多实际应用中都有重要的作用,比如路线规划、网络通信等。
为了解决无权图的最短路径问题,人们发展了许多算法,下面将介绍两种常用的算法:广度优先搜索(BFS)和Dijkstra算法。
一、广度优先搜索算法(BFS)广度优先搜索算法是一种重要的图遍历算法,它从给定的起始顶点出发,逐层遍历图中的节点,直到找到目标节点或者遍历完所有节点。
具体步骤如下:1.将起始顶点标记为已访问,并将其入队。
2.重复以下步骤直到队列为空:a)将队首元素出队,并记录为当前顶点。
b)遍历当前顶点的所有邻接顶点:-若邻接顶点未被访问,则将其标记为已访问,并将其入队。
3.如果找到目标顶点,则停止遍历,否则继续遍历直到所有节点都被访问。
BFS算法可以保证在无权图中找到的第一个路径就是最短路径,因此它非常适用于解决无权图的最短路径问题。
二、Dijkstra算法Dijkstra算法是一种经典的最短路径算法,它可以在有向图或无向图中找到从一个起点到其他所有顶点的最短路径。
具体步骤如下:1.初始化距离数组dist[],将起始顶点的距离设为0,其余顶点的距离设为无穷大。
2.重复以下步骤直到所有顶点都被访问:a)从未访问的顶点中选择距离起始顶点最近的顶点,并将其标记为已访问。
b)更新起始顶点到所有邻接顶点的距离:-若经过当前顶点到达邻接顶点的距离比已记录的距离更短,则更新距离。
3.遍历完所有顶点后,dist[]数组中存储的就是起始顶点到其他所有顶点的最短距离。
需要注意的是,Dijkstra算法要求图中的边权值都为非负数。
当图中存在负权边时,可以使用其他算法如Bellman-Ford算法进行求解。
结语无权图的最短路径算法是解决许多实际问题的基础,通过广度优先搜索算法和Dijkstra算法,我们可以高效地找到最短路径。

c++ 遍历所有点且距离最短_最短路径问题dijkstra算法详解一、问题概述在图论中,最短路径问题是一个重要的研究课题,它涉及到从一个节点到另一个节点的最短路径的寻找。
Dijkstra算法是一种用于解决最短路径问题的经典算法,它可以高效地遍历图中的所有节点,并找到从起始节点到目标节点的最短路径。
二、Dijkstra算法详解1. 算法思想Dijkstra算法的基本思想是:对于图中的每个节点,选择距离起始节点最近的节点,并将其标记为已访问。
然后,从已访问的节点中选择下一个距离起始节点最近的节点,并将其标记为已访问。
重复这个过程,直到遍历完所有的节点。
在每一步中,算法都会更新节点之间的距离信息,以使得结果更加精确。
2. 算法步骤(1) 初始化:将起始节点的距离设置为0,将所有其他节点的距离设置为无穷大。
将起始节点标记为已访问。
(2) 遍历所有相邻节点:对于每个已访问的节点,遍历其所有相邻节点,并更新它们到起始节点的距离。
对于每个相邻节点,如果通过该相邻节点到达起始节点的距离比当前距离更短,则更新该相邻节点的距离。
(3) 终止条件:当没有未访问的节点时,算法终止。
此时,每个节点的最短路径已经确定。
3. C语言实现以下是一个简单的C语言实现Dijkstra算法的示例代码:```c#include <stdio.h>#include <stdlib.h>#define MAX_VERTICES (100) // 最大顶点数int minDistance[MAX_VERTICES]; // 存储最小距离的数组int dist[MAX_VERTICES]; // 存储每个节点到起点的实际距离的数组bool visited[MAX_VERTICES]; // 标记每个节点是否已访问的数组int src; // 起点int V; // 顶点数void dijkstra(int G[MAX_VERTIXE][MAX_VERTICES], int src) {V = G[0].size(); // 获取顶点数for (int i = 0; i < V; i++) {dist[i] = INT_MAX; // 初始化所有顶点到起点的距离为无穷大visited[i] = false; // 所有顶点未访问}dist[src] = 0; // 起点的距离为0for (int count = 0; count < V - 1; count++) {int u = vertex_selection(G, dist, visited); // 选择当前距离最小的顶点uvisited[u] = true; // 将u标记为已访问for (int v = 0; v < V; v++) { // 遍历u的所有邻居顶点if (!visited[v] && (dist[v] > dist[u] + G[u][v])) { // 如果未访问且通过u到达v的距离更短dist[v] = dist[u] + G[u][v]; // 更新v的距离信息}}}}int vertex_selection(int G[MAX_VERTICES][MAX_VERTICES], int dist[], bool visited[]) {int minIdx = 0, minDist = INT_MAX;for (int v = 0; v < V; v++) { // 遍历所有顶点vif (!visited[v] && minDist > dist[v]) { // 如果未访问且当前距离更短minDist = dist[v];minIdx = v; // 记录最小距离和对应的顶点索引}}return minIdx; // 返回最小距离对应的顶点索引}```三、应用场景与优化方法Dijkstra算法适用于具有稀疏权重的图,它可以高效地找到最短路径。
最短路径数学表达在数学中,最短路径问题是一种最优化问题,它涉及从一个源点到一个终点的最短路径查找。
最短路径问题在很多实际场景中都有广泛的应用,比如交通系统中的最短路径规划、位置服务(GPS)、物流规划、图像处理等等。
最短路径的数学表达可以用来解决路径优化问题,其一般形式如下:最短路径问题:给定一个有向图G=(V,E),给定两个结点s和t,求从s到t的一条最短路径。
最短路径问题的数学模型可以表示为:min f(x) = c(x)s.t. x∈P(s, t)其中x是最短路径中的路径矢量,c(x)是路径代价函数,P(s,t)是从s到t的所有路径集。
该模型可以把最短路径问题转化为一个求最小值的优化问题,即求出代价值最小的最短路径。
最短路径问题的求解通常有多种算法,比如贪婪算法、动态规划等等。
其中最常用的方法是Dijkstra算法,它是一种潜伏机制,通过合理的搜索,可以在有向图中找到最短路径。
Dijkstra算法的步骤如下:1.定源点s,初始化s的距离为0,设定其他结点的距离为无穷大,表示尚未探测;2.较上一个节点的所有邻接节点,把当前访问节点的距离和邻接节点的距离加起来,求出新的距离,取最小值更新邻接节点的距离;3.复以上步骤,直到把终点t也更新为最短路径;4.最终结果抽象为路径,返回最短路径。
由于有了最短路径数学表达式和算法,可以利用数学建模求解各种实际场景中的最短路径优化问题,比如位置服务(GPS),它可以帮助你避免在交通拥挤的城市中走着走着就迷路,便捷高效地达到目的地;物流规划中也可以利用最短路径的数学模型来求解路径最优化问题,从而找到最快、最省费用的路线;在图像处理中,最短路径可以用来求解最短连接问题,例如计算机视觉系统中视觉对象的精确轮廓提取。
综上所述,最短路径问题在实际场景中具有重要的应用价值,它可以帮助求解许多优化问题,而最短路径的数学表达以及求解算法也成为实现这些问题的基础和依据。
从某个源点到其它各顶点间的最短路径这里路径指两顶点间的通路,路径的长度指所有经过的边的总长。
“最短路径”的问题指当两个顶点间通路多于一条时,如何找出边长总和为最短的那条。
Dijkstra 提出按路径长度递增的次序求最短路径的方法。
1、 Dijkstra 求最短路径的基本思想 把顶点分成两组,第一组是已确定最短路径的结点的集合,第二组是尚未确定最短路径的结点的集合。
按路径长度递增的次序逐个把第二组的顶点放到第一组中。
设求从v0到其它各顶点间的最短路径,则在任意时刻,从v0到第一组各顶点间的最短路径都不大于从v0到第二组各顶点间的最短路径。
2、Dijkstra 求最短路径的步骤设图以邻接矩阵arcs 存储,矩阵中各元素的值为各边的权值。
顶点间无边时其对应权值用无穷大表示。
从顶点v0到其它各顶点间的最短路径的具体步骤如下:(1)初始化:第一组(集合s )只含顶点v0,第二组(集合v-s )含有图中其余顶点。
设一dist 向量,其下标是各顶点,元素值是顶点v0到各顶点的边的权值。
若v0到某顶点无边,dist 向量中的对应值为无穷大。
(2)选dist 中最小的权值,将其顶点(j )加入s 集合。
s=s {j}(3)修改从顶点v0到集合t(t=V -s)中各顶点的最短路径长度,如果 dist[j]+arcs[j][k]<dist[k] 则修改dist[k]为dist[k]=dist[j]+arcs[j][k] (4) 重复(2)、(3)n-1次。
由此求得v0到图上其余各顶点得最短路径。
3、例:求下图从v0到其余各顶点的最短路径。
图7.34 一个带权有向图G6图的邻接矩阵如下:⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞=6020105051003010.arcs G算法(程序)如下:/* 用邻接矩阵表示的图的Dijkstra算法的源程序2010年11月16日修改*/#include <stdio.h>#include <limits.h>#define INFINITY INT_MAX#define MAXVEX 6#define FALSE 0#define TRUE 1typedef char V exType;typedef float AdjType;typedef struct{ int vexnum; /* 图的顶点个数*/V exType vexs[MAXVEX]; /* 顶点信息*/AdjType arcs[MAXVEX][MAXVEX]; /* 边信息*/}MGraph;void ShortestPath_DIJ(MGraph &G,int p[][MAXVEX],AdjType D[]){ int v,w,i,j;AdjType min;int final[MAXVEX]; //final[v]为TRUE当且仅当v∈s,即已求得从v0到v的最短路径for(i=0;i<G.vexnum;i++){ final[i]=FALSE; D[i]=G.arcs[0][i];for(w=0;w<G.vexnum;w++) p[i][w]=FALSE; /*设空路径*/if(D[i]<INFINITY) /*如果V0到V i有直接路径则置p[i][0]和p[i][i]为1*/{ p[i][0]=TRUE;p[i][i]=TRUE;}}/*for语句结束*/D[0]=0; final[0]=TRUE; /* 初始化,表示顶点v0在集合S中*/for(i=1;i<G.vexnum;i++)/*开始主循环,每次求得v0到某个v顶点的最短路径,并加v到s集*/{ min=INFINITY;for(w=0;w<G.vexnum;w++) /*在V-S中选出距离值最小顶点*/if(!final[w]&&D[w]<min) /*w顶点离v0顶点是更近*/{ v=w; min=D[w]; }final[v]=TRUE; /*离v0最近的v加入S集*/for(w=0;w<G.vexnum;w++) /*更新当前最短路径及距离*/if(!final[w]&&(min+G.arcs[v][w]<D[w])) /*修改D[w]和p[w],w∈v-S*/{ D[w]=min+G.arcs[v][w]; /*修改路径长度*/for(j=0;j<G.vexnum;j++)p[w][j]=p[v][j]; /*修改路径为经过v到达w*/p[w][w]=TRUE;} /*if结束*/}/*for结束*/}/*ShortestPath_DIJ结束*/void main() { int i,j;MGraph G;AdjType D[MAXVEX]; /*D(v)为v0到v 的路径长度*/int p[MAXVEX][MAXVEX]; /*p(v)记录v0到v 的最短路径,若p[v][w]为TRUE ,则w 是从v0到v 当前求得最短路径上的顶点*/ G .vexnum=6;for(i=0;i<G .vexnum;i++)for(j=0;j<G .vexnum;j++)G .arcs[i][j]=INFINITY ; /*G 数组初始化最大值*/ G .arcs[0][2]=10; G .arcs[0][4]=30; G .arcs[0][5]=100; G .arcs[1][2]=5; G .arcs[2][3]=50; G .arcs[3][5]=10; G .arcs[4][3]=20; G .arcs[4][5]=60; ShortestPath_DIJ(G ,p,D);for(i=0;i<G .vexnum;i++) /*以邻接矩阵形式输出图*/ { for(j=0;j<G .vexnum;j++)printf("%12.0f",G .arcs[i][j]); printf("\n"); }for(i=0;i<G .vexnum;i++) /*输出V0到其它各顶点的路径*/ { for(j=0;j<G .vexnum;j++)printf("%3d",p[i][j]); printf("\n"); }for(i=0;i<G .vexnum;i++) /*输出V0到其它各顶点的最短距离*/ printf("%.0f ",D[i]); }final 、D 和p 数组的初始状态:fina l =⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡000000 D =⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡1003032767103276732767 ⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡=101010*********000101000000000000p 下标=⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡543210 输出:32767要换成214748364832767 32767 10 32767 30 100 32767 32767 5 32767 32767 3276732767 32767 32767 50 32767 32767 32767 32767 32767 32767 32767 10 32767 32767 32767 20 32767 60 32767 32767 32767 32767 32767 32767D 数组的变化情况final 、D 和p 数组的终止状态:fina l =⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡111111 D =⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡60305010327670 ⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡=1111010*********000101000000000000p 下标=⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡543210 其中P 中记录的是最短路径,D 数组记录的是最短距离。
迪杰斯特拉算法求最短路径图解
迪杰斯特拉算法是在用运筹学中解决路径搜索问题时候非常有用的一种算法。
它适用于求解从一个点到其他所有点的最短路径。
这种算法主要应用于交通网络,求解旅游问题,处理穿越桥梁或隧道的情况等等。
迪杰斯特拉算法的含义就是“最短路径”。
这种算法比较常见的一种,因为它
可以用于解决上述类型的问题,也能够给出即时的答案。
需要说明的是,运用迪杰斯特拉算法求解最短路径,需要满足一定的条件:必须满足图的邻接关系,并且确定用于求最短路径的起点和终点。
迪杰斯特拉的步骤可以分为四步:
第一步:先从所有节点中选择一个起始节点,找出该节点与其他节点之间的最
短路径;
第二步:选择一个未被访问的节点,计算从起始节点到该节点的最短路径长度;
第三步:在剩余节点中重复步骤二直至起始节点与所有节点均被访问;
第四步:当所有节点都被访问后,根据记录的信息,选择起始节点通往其他节
点的最短路径。
一旦经过这四步完成了最短路径的搜索,就可以使用迪杰斯特拉算法解决最短
路径问题了。
这种算法的特点在于它的有效性,准确性和便捷性,可以找出最短路径的最优解来解决问题,并且很容易实施。
解决最短路径问题时,使用该算法的一大优势在于可以考虑到不同的费用,这也就意味着可以计算具有很高效率的最短路径。
几种常用的最短路径算法最短路径算法是在图中查找两个节点之间最短路径的方法。
它是图论中非常重要的问题,被广泛应用于网络路由、地图导航、路径规划等领域。
在本文中,将介绍几种常用的最短路径算法,包括Dijkstra算法、Bellman-Ford算法、Floyd-Warshall算法和A*算法。
1. Dijkstra算法Dijkstra算法是由荷兰计算机科学家Edsger W. Dijkstra于1959年提出的,常用于在图中查询单个源节点到所有其他节点的最短路径。
该算法使用贪心策略,不断选择距离最短的节点进行扩展,直至达到目标节点或所有节点都被遍历。
Dijkstra算法的时间复杂度为O(V^2),其中V为节点的数量。
2. Bellman-Ford算法Bellman-Ford算法是由理查德·贝尔曼和阿瑟·福特于1958年提出的,用于求解带有负权边的图的最短路径。
与Dijkstra算法不同的是,Bellman-Ford算法每轮遍历所有边,进行松弛操作,直至没有可松弛的边为止。
该算法在每一轮遍历时对所有边进行松弛操作,需要进行V-1轮的遍历,其中V为节点的数量。
因此,Bellman-Ford算法的时间复杂度为O(VE)。
3. Floyd-Warshall算法Floyd-Warshall算法是由罗伯特·弗洛伊德和斯蒂芬·沃舍尔于1962年提出的,用于求解任意两个节点之间的最短路径。
该算法使用动态规划的思想,通过中间节点进行迭代计算。
具体来说,Floyd-Warshall算法维护一个距离矩阵,其中每一对节点之间的距离都被逐步更新。
该算法的时间复杂度为O(V^3),其中V为节点的数量。
4.A*算法A*算法是一种启发式算法,由彼得·哈特和诺尔曼·尼尔斯于1968年提出。
与前面介绍的算法不同的是,A*算法不仅考虑节点之间的距离,还引入了启发式函数来估计节点到目标节点的距离。