动态范围与信噪比区别
- 格式:docx
- 大小:15.30 KB
- 文档页数:1
音频信噪比音频信噪比是指音响设备播放时,正常声音信号强度与噪声信号强度的比值。
当信噪比低,小信号输入时噪音严重,在整个音域的声音明显变得浑浊不清,不知发的是什么音,严重影响音质。
信噪比的大小是用有用信号功率(或电压)和噪声功率(或电压)比值的对数来表示的。
这样计算出来的单位称为“贝尔”。
实用中因为贝尔这个单位太大,所以用它的十分之一做计算单位,称为“分贝”。
对于便携式DVD来说,信噪比至少应该在70dB(分贝)以上,才可以考虑。
信噪比,即SNR(Signal to Noise Ratio),又称为讯噪比。
狭义来讲是指放大器的输出信号的电压与同时输出的噪声电压的比,常常用分贝数表示,设备的信噪比越高表明它产生的杂音越少。
一般来说,信噪比越大,说明混在信号里的噪声越小,声音回放的音质量越高,否则相反。
信噪比一般不应该低于70dB,高保真音箱的信噪比应达到110dB以上。
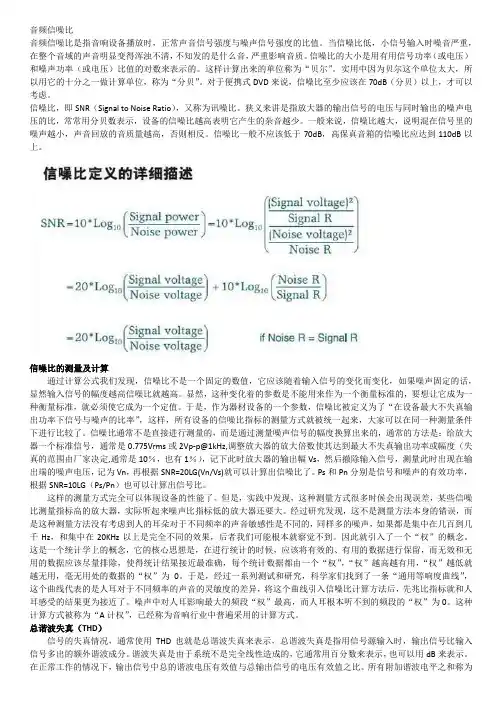
信噪比的测量及计算通过计算公式我们发现,信噪比不是一个固定的数值,它应该随着输入信号的变化而变化,如果噪声固定的话,显然输入信号的幅度越高信噪比就越高。
显然,这种变化着的参数是不能用来作为一个衡量标准的,要想让它成为一种衡量标准,就必须使它成为一个定值。
于是,作为器材设备的一个参数,信噪比被定义为了“在设备最大不失真输出功率下信号与噪声的比率”,这样,所有设备的信噪比指标的测量方式就被统一起来,大家可以在同一种测量条件下进行比较了。
信噪比通常不是直接进行测量的,而是通过测量噪声信号的幅度换算出来的,通常的方法是:给放大器一个标准信号,通常是0.775Vrms或2Vp-p@1kHz,调整放大器的放大倍数使其达到最大不失真输出功率或幅度(失真的范围由厂家决定,通常是10%,也有1%),记下此时放大器的输出幅Vs,然后撤除输入信号,测量此时出现在输出端的噪声电压,记为Vn,再根据SNR=20LG(Vn/Vs)就可以计算出信噪比了。
Ps和Pn分别是信号和噪声的有效功率,根据SNR=10LG(Ps/Pn)也可以计算出信号比。
音频采样深度与动态范围关系随着科技的不断进步,音频行业也逐渐发展壮大。
在音频领域中,采样深度和动态范围是两个重要的概念。
本文将介绍音频采样深度和动态范围的概念,并探讨它们之间的关系。
一、音频采样深度的定义和作用音频采样深度指的是每个采样点的位数,也称为量化位数。
常见的音频采样深度有16位、24位和32位。
采样深度越高,表示可以表达的音频信号细节越多,音质表现能力越强。
音频采样深度的作用在于决定每个采样点的取值范围。
例如,16位采样深度的取值范围是-32768到32767,而24位采样深度的取值范围是-8388608到8388607。
采样深度越高,取值范围就越大,从而可以更准确地表示音频信号的细节。
二、动态范围的定义和影响因素动态范围指的是在音频信号中能够表达的最小和最大幅度之间的差异。
它是衡量音频信号丰富程度和细节表现能力的指标。
动态范围越大,表示音频信号的细节表现能力越强。
动态范围的大小受到多个因素的影响。
其中最重要的是音频采样深度和信噪比。
较高的采样深度可以提供更多的细节,有利于音频信号的动态范围扩展。
较高的信噪比可以有效降低噪音的干扰,提高动态范围。
三、音频采样深度与动态范围的关系音频采样深度和动态范围之间存在密切的关系。
采样深度决定了每个采样点的取值范围,而动态范围反映了音频信号的幅度变化范围。
采样深度越高,表示每个采样点可以表示的细节越多,因此音频信号的动态范围也会相应增加。
例如,对于同一个音频信号,在16位采样深度下,其动态范围可能只有90dB左右,而在24位采样深度下,动态范围可能增加到120dB以上。
这是因为24位采样深度可以更准确地表示音频信号的细节,从而提高了动态范围。
需要注意的是,采样深度的增加并不能无限地提高动态范围。
一方面,实际中的音频通常并不会涵盖如此宽广的动态范围,因此较高的采样深度可能会导致浪费。
另一方面,随着采样深度的增加,音频文件的大小也会增加,对存储和传输带来一定的挑战。
音频CODEC中常用的音频术语的含义对于一个音频ADC、DAC或CODEC,常用一些特定的音频术语来标称该器件的质量。
常用的一些音频术语包括分辨率、采样时钟频率(左右声道时钟频率)、THD、THD+N、动态范围、信噪比、幅度-频率响应等1. 音频频带音频频带通常指20Hz到20kHz这一频段。
2. 分辨率分辨率是指转换中能够分辨的最小量。
习惯上用转换结果的位数来表示。
比如我们所有的CODEC、ADC、DAC都是24bi t分辨率3. 采样时钟频率(左右声道时钟频率,LRCK)采样时钟频率是指转换器对信号的采样次数。
常用的采样时钟频率有48kHz、44.1kHz等。
根据采样原理,实际上,COD EC或ADC、DAC可处理的信号带宽最高只有LRCK / 2。
假设采样时钟频率为44.1kHz,那么,能够处理的最高信号带宽为22.05kHz。
假设采样时钟频率为32kHz,那么,能够处理的最高信号带宽为16kHz。
音频CODEC中常用的音频术语的含义4. 加权(噪声计权)滤波器在有关音频的噪声测量过程中,会使用到加权滤波器。
加权滤波器是用来模拟人耳的频率响应,使得测量的结果更贴近人耳的实际听觉。
常用的滤波器在中心频率所处的音频范围内,其幅频响应是平坦的。
但加权滤波器的幅频响应是没有平坦的部分的。
这是因为人耳的频率响应是不平坦的,对于低频或高频段,人耳的分辨力是很弱的。
因此,为了使测量的结果更贴近实际,一般在噪声测量中会使用加权滤波器。
常用的加权滤波器为A加权滤波器。
音频CODEC中常用的音频术语的含义音频CODEC中常用的音频术语的含义5. 谐波失真THD如果一个音频ADC、DAC或CODEC,它具备绝对线性的传输函数,那么,当使用一个单音正弦波信号激励这个器件时,它的输出端应该产生与输入激励信号完全一样的正弦信号。
我们在这里称之为无失真的设备。
如果音频ADC、DAC或CODEC的传输函数是非线性的,那么,当使用一个单音正弦波信号激励这个器件时,这种非线性的传输函数会导致输出中既包含基频部分(单音正弦激励信号),也包括基频的谐波成份。
资深视觉工程师整理工业相机39问(上)点赞收藏!1:工业相机的丢帧的问题是由什么原因引起的?工业相机的丢帧现象和相机采用的接口没有关系,不管什么接口,驱动程序设计的不良和工业相机硬件才是丢帧的真正原因。
丢帧的原因其实就是资料通道堵塞,新的图像进来是,没有办法及时处理,前一张可能被迫丢弃,或者新的图像丢失。
要想解决丢帧问题,必须针对驱动程序和工业相机硬件资料传输中间的每一个环节进行精密设计。
2:工业相机输出、输入接口有哪些?工业相机的输入、输出接口有USB3.0,IEEE 1394,Camera Link、USB2.0、Ethernet、几种;3:知道被测物的长、宽、高以及要求的测量精度,如何来选择CCD 相机和工业镜头,选择以上器件需要注意什么?首先要选择合适的镜头。
选择镜头应该遵循以下原则:1)镜头的芯片靶面大于或者等于工业相机芯片;2)选择匹配相机接口的镜头,是C接口还是F接口,或着M42接口等;3)注意选择镜头的最小工作距离,镜头畸变,结构尺寸及光谱特性;选择CCD 相机时,应该综合考虑以下几个方面:1).注意感光芯片类型;通常CCD 或者CMOS,CCD的成像质量优于CMOS,成本也高于CMOS,同样分辨率的传感器,优先选择尺寸大的,有利于成像质量的提高;2).视频特点;包括点频、行频。
3).相机输出接口,不同的输出接口对用不同的带宽,根据传输的距离,稳定性,传输数据的大小(带宽)等合适的选择USB,1394,Camerlink或者百兆/千兆网接口的相机;4).相机的工作模式:连续,触发,控制,异步复位,长时间积分。
5).视频参数调整及控制方法:Manual、RS232.同时,选择CCD 的时候应该注意,l inch = 16mm 而不是等于25.4mm.4:CCD 相机与CMOS 相机的区别在哪里?主要区别:CMOS(互补金属氧化物半导体)1.采用CMOS芯片,价格相对CCD相机较低2.CMOS芯片曝光方式一般为卷帘式快门曝光,适合拍摄静止物,体拍摄运动物体有拖影,且图像会变形3.色彩还原性较差4.芯片动态范围较小,灵敏度较差但在光照充足的情况下,也能取得较好的图像效果5.系统噪声:中到高:CCD(电荷耦合器件)1.采用CCD芯片,价格较高D芯片曝光方式一般为帧(全局快门)曝光,适合拍摄静止或运动物体3.色彩还原性好4.芯片动态范围较大,灵敏度好,成像效果对外界打光的依赖比CMOS芯片低5.系统噪声:低5:工业相机都有哪些主要参数?1.分辨率( Resolution );相机每次采集图像的像素点数(Pixels),对于工业数字相机一般是直接与光电传感器的像元数对应的,对于工业数字模拟相机则是取决于视频制式,PAL制为768*576,NTSC制为640*480。
信噪比的计算公式信噪比(Signal-to-Noise Ratio, SNR)是衡量信号质量的一个重要指标,它表示信号与噪声的比值。
信号越强、噪声越小,信噪比就越高,反之亦然。
在无线通信、音频处理、图像处理等领域都有广泛的应用。
信噪比的计算公式可以表示为 SNR = P_signal / P_noise ,其中P_signal 是信号的功率,P_noise 是噪声的功率。
信号的功率可以通过信号的幅度平方来计算,通常表示为P_signal = |S(S)|^2 ,其中S(S) 表示信号的复数时域函数。
噪声的功率可以通过噪声的均方根幅度来计算,通常表示为P_noise = S^2 ,其中S是噪声的均方根幅度。
在实际应用中,计算信噪比时需要先获取信号的功率和噪声的功率。
下面是一些常见的计算信噪比的方法。
1. 直接测量法:通过实际测量信号的功率和噪声的功率来计算信噪比。
在无线通信中,可以使用功率计来测量信号和噪声的功率。
在音频处理中,可以使用音频分析仪来测量信号和噪声的功率。
2. 载噪比法:在某些应用中,可以通过测量信号和噪声的幅度来计算信噪比。
例如,在调制解调器中可以使用载噪比(CNR)来表示信号与噪声的比值,计算公式为 CNR = 20log10(|SSSSSS / S|),其中SSSSSS表示信号的幅度,S表示噪声的幅度。
3. 信号能量法:在某些情况下,可以通过信号和噪声的能量来计算信噪比。
信号的能量可以通过信号的幅度平方的积分来计算,噪声的能量可以通过噪声的幅度平方的积分来计算。
然后将信号的能量除以噪声的能量即可得到信噪比。
4. 图像质量评价方法:在图像处理中,可以使用图像质量评价方法来计算信噪比。
例如,可以使用峰值信噪比(PSNR)来表示信号与噪声的比值,计算公式为 PSNR = 10 log10(255^2 / MSE),其中255^2是图像的动态范围,MSE是均方误差。
需要注意的是,不同应用领域对于信噪比的计算方法可能会略有不同,上述提到的方法仅为一般的参考内容。
msb解码参数
MSB解码器是一种高质量的数字音频解码器,被广泛应用于高端音频设备中。
其主要特点是高精度、低噪声和低失真,能够还原音频信号的细节和动态范围,提供清晰、纯净的音质表现。
MSB解码器的参数包括多个方面,其中最重要的是解码精度和动态范围。
解码精度指的是解码器能够处理的数字音频信号的位数,一般来说,位数越高,解码精度就越高,音质表现也就越好。
而动态范围则是指解码器能够处理的音频信号的动态范围,也就是最大信号和最小信号之间的比值。
动态范围越大,解码器就能够更好地还原音频信号的细节和动态变化。
除了解码精度和动态范围之外,MSB解码器的参数还包括采样率、信噪比、失真度等。
采样率指的是数字音频信号的采样频率,一般来说,采样率越高,音质表现也就越好。
信噪比则是指解码器输出信号与噪声信号之间的比值,信噪比越高,噪声干扰就越小,音质表现也就越清晰。
而失真度则是指解码器输出信号与原始信号之间的差异程度,失真度越小,音质表现也就越真实。
总之,MSB解码器的参数是多方面的,这些参数共同决定了解码器的性能和音质表现。
在选择MSB解码器时,需要根据实际需求和使用环境来综合考虑这些参数,以选择最适合自己的解码器。
同时,在使用MSB解码器时,也需要注意正确的连接和配置,以保证最佳的音质表现效果。
⾳频质量评价指标信噪⽐,SNR或S/N,⼜称为讯噪⽐。
是指⼀个电⼦设备或者电⼦系统中信号与噪声的⽐例。
这⾥⾯的信号指的是来⾃设备外部需要通过这台设备进⾏处理的电⼦信号,噪声是指经过该设备后产⽣的原信号中并不存在的⽆规则的额外信号(或信息),并且该种信号并不随原信号的变化⽽变化。
同样是“原信号不存在”还有⼀种东西叫“失真”,失真和噪声实际上有⼀定关系,⼆者的不同是失真是有规律的,⽽噪声则是⽆规律的。
【计算】信噪⽐的计量单位是dB,其计算⽅法是10lg(PS/PN),其中Ps和Pn分别代表信号和噪声的有效功率,也可以换算成电压幅值的⽐率关系:20Lg(VS/VN),Vs和Vn分别代表信号和噪声电压的“有效值”。
在⾳频放⼤器中,希望的是该放⼤器除了放⼤信号外,不应该添加任何其它额外的东西。
因此,信噪⽐应该越⾼越好。
【狭义】指放⼤器的输出信号的功率与同时输出的噪声功率的⽐,常常⽤分贝数表⽰,设备的信噪⽐越⾼表明它产⽣的噪声越少。
⼀般来说,信噪⽐越⼤,说明混在信号⾥的噪声越⼩,声⾳回放的⾳质量越⾼,否则相反。
信噪⽐⼀般不应该低于70dB,⾼保真⾳箱的信噪⽐应达到110dB以上。
【载噪⽐】载噪⽐中的已调信号的功率包括了传输信号的功率和调制载波的功率,⽽信噪⽐中仅包括传输信号的功率。
因此对同⼀个传输系统⽽⾔,载噪⽐要⽐信噪⽐⼤,两者之间相差⼀个载波功率。
当然载波功率与传输信号功率相⽐通常都是很⼩的,因⽽载噪⽐与信噪⽐在数值上⼗分接近。
在调制传输系统中,⼀般采⽤载噪⽐指标;⽽在基带传输系统中,⼀般采⽤信噪⽐指标。
【db,dbm,dbw关系】db是纯数值,作⽐较⽤的,如果是电压之类的,换算时就⽤20log,⽽功率则⽤10log,DB在缺省情况下总是定义功率单位,以 10log 为计。
dbW和dbm是功率绝对值,0dBw = 10log1W = 10log1000mw = 30dBm;但是,⽤⼀个dBm减另外⼀个dBm时,得到的结果是dB。
单反相机的宽容度和动态范围的区别在哪里?动态范围是信号处理上的概念,表示可变化信号中最大值和最小值的比值,通常用对数表示。
摄影中这个概念有几个层次,首先是场景光的动态范围,晴朗的白天光照强度可以超过10000lux,而满月月光的照度是lux,如果一个场景中同时出现两者,那么亮区和暗区的光比就是动态范围。
其次是传感器本身的物理动态范围,通常是传感器的最大和最小测量值的比值,最大测量值受制于传感器的物理设计,而最小测量值受制于噪声水平。
最后一个动态范围是记录到照片文件中的动态范围,取决于图像文件的信噪比,同读出电路噪声,数据压缩损失都有关系。
这三个动态范围是相互联系的,通常来说场景光的动态范围非常大,复杂场景的光比经常超过传感器的动态范围,所以实际照片记录下来的动态范围主要取决于传感器性能。
而在传感器记录信号的基础上,后续的信号读出电路,机内图像修正,文件压缩损失等等都会进一步造成动态范围的损失(典型的比如将照片存为RAW和JPG的不同),所以一般情况下照片动态范围都会小于传感器的性能上限。
在拍照中,如果场景光的动态范围超过了最终照片的动态范围,那么超过的部分就不会记录下来造成信息的损失。
例如过亮的部分在照片中一片白,过暗的部分一片黑,而由于信息没有记录,后期处理也完全无法恢复这些这些部分的细节。
所以为了得到一张高光和阴影部分都有丰富细节的照片,相机的动态范围越高越好。
胶片的动态范围5~10个Ev,而现在最好的数字传感器可以做到接近14个Ev,所以很多原先需要多张包围曝光,拼接,摇黑卡,渐变滤镜等等的拍照场景,都可以用顶级数码相机一次拍照记录完整信息,再后期处理出同样的照片了。
最后是宽容度,它和动态范围有区别也有联系。
假设一台相机的动态范围是13Ev,要求高画质且RAW拍照时可用中间的6Ev。
那么如果被摄物的正确曝光在0Ev,实际曝光参数在-3Ev到+3Ev之间都可以通过后期处理得到满意的画质,这时候就将宽容度称作-3Ev到+3Ev(注意上下限之差是6Ev,也可以说相机宽容度范围是6ev,或是高光宽容度+3Ev/暗光宽容度-3Ev)。
np01s参数摘要:一、np01s参数简介二、np01s参数的设置方法三、np01s参数在实际应用中的案例解析四、如何优化np01s参数以提高性能五、总结与建议正文:np01s参数是在某个领域中常见的一种技术参数,它对于设备的性能和功能起着关键性的作用。
本文将详细介绍np01s参数的设置方法、实际应用案例解析以及如何优化np01s参数以提高性能。
一、np01s参数简介p01s参数,全称为“纳米像素级光学传感器参数”,是一种用于描述光学传感器性能的关键指标。
np01s参数主要包括:分辨率、灵敏度、动态范围、信噪比等。
这些参数直接影响到光学传感器的成像质量和应用效果。
二、np01s参数的设置方法1.分辨率:根据实际应用需求和设备性能,合理选择传感器的分辨率。
一般来说,分辨率越高,成像效果越好,但同时对计算能力和存储空间的要求也越高。
2.灵敏度:灵敏度是指传感器对输入信号的响应程度。
在实际应用中,可根据环境光照条件和目标物体的亮度,合理调整灵敏度,以获得较好的成像效果。
3.动态范围:动态范围是指传感器在同一场景下能够捕捉到的最大光强度范围。
根据实际应用场景的光照条件,合理设置动态范围,有助于提高成像质量。
4.信噪比:信噪比是指传感器输出信号与噪声信号的比值。
提高信噪比可以有效降低图像噪声,提升图像质量。
在设置np01s参数时,应关注信噪比的表现。
三、np01s参数在实际应用中的案例解析1.摄像头:在摄像头领域,np01s参数的设置直接影响到图像的清晰度和色彩表现。
例如,在高光照条件下,可适当降低灵敏度,减小动态范围,以避免过曝现象;在低光照条件下,可提高灵敏度,扩大动态范围,以获得更好的成像效果。
2.自动驾驶:在自动驾驶领域,np01s参数的设置关系到感知系统的性能。
例如,提高传感器的分辨率,可以提高对周围环境的感知精度;优化信噪比,可以降低误判率,提高驾驶安全。
四、如何优化np01s参数以提高性能1.针对不同应用场景,合理调整np01s参数。
视频监控摄像机动态范围检测2011-4-7来源:中国安防展览网摄像机动态范围的基本概念所谓宽动态实际是指摄像机同时可以看清楚图像最亮与最暗部分的照度比值。
而“动态范围”广义上说是指某一变化事物可能改变的跨度,即其变化值的最低端极点到最高端极点之间的区域,此区域的描述一般为最高点与最低点之间的差值。
摄像机的“动态范围”是指摄像机对拍摄场景中景物光照反射的适应能力,具体指亮度(反差)及色温(反差)的变化范围。
即表示摄像机对图像的最“暗”和最“亮”的调整范围,是静态图像或视频帧中最亮色调与最暗色调的比值。
而色调能呈现出图像或帧中的精准细节,作为两种色调的比值,动态范围的单位可以是分贝、比特、档,或者简单以比率或倍数来表示。
各种单位之间的换算方法如表1所示。
表1仅列出了20档动态范围,因为这几乎涵盖了人眼所能分辨的所有动态范围,超过这些档位的动态范围已没有太大的实际意义。
人眼之所以能分辨出跨度如此之广的动态范围,是因为人在观察实景时,瞳孔、虹膜、视网膜和相关肌肉会相互作用、动态调整,同时,大脑会将所有“曝光元素”整合为一幅连贯的图像,极其精准地反映出实景中十分明亮或十分暗淡的色调。
与人眼相比,对于标准CCD和CMOS图像传感器来说,所有感光单元的曝光(收集光子)时间都是相同的。
感光单元对景物明亮部分收集的光子较多,对阴暗部分收集的光子则较少。
但是,感光单元能够收集的光子数量却受到阱容量(wellcapacity)的限制,所以捕捉物体较亮色调的感光单元有可能会溢出或饱和。
为防止出现这种情况,可以减少曝光时间。
但如果这样做,捕捉物体较暗色调的感光单元可能又无法收集到足够多的光子。
因此,对于典型的单次曝光的图像传感器,其动态范围的上限受制于感光单元的阱容量,下限则受制于感光单元的信噪比。
因此,CCD摄像器件的动态范围是指其输出的饱和电压与暗场下噪声峰-峰电压之比,即动态范围=Usat/UNp-p(1)(1)式中,Usat为输出饱和电压;UNP-P为噪声的峰-峰值。
常用通信射频指标的意义随着全球通信技术的迅猛发展,射频技术在通信领域的应用日益广泛。
在设计和评估通信系统时,常用的射频指标能够帮助工程师理解和优化射频性能。
以下是一些常见的通信射频指标及其意义。
1.信噪比(SNR):信噪比是指信号与噪声的功率比值,用来衡量信号的质量。
在通信系统中,信噪比越高,接收到的信号质量就越好,信息传输的可靠性也越高。
2. 带宽(Bandwidth):带宽是指频谱中信号所占的频率范围,通常以赫兹(Hz)为单位。
较宽的带宽通常能够支持更高的数据传输速率,但同时也需要更大的传输能量。
带宽的选择需要在传输速率和能量效率之间进行权衡。
3. 衰减(Attenuation):衰减是指信号在传输过程中丢失能量的情况。
衰减通常由传输介质的损耗引起,例如电缆、空气等。
较小的衰减意味着信号能够更远距离地传输,同时也会减少信号的失真和噪声。
4. 增益(Gain):增益是指信号在传输或接收过程中获得的能量。
增益常用来描述天线的性能,也可以用来衡量放大器或接收机的效率。
较大的增益意味着信号可以更远距离地传输,但同时也会增加噪声和失真的风险。
5. 频率(Frequency):频率是指信号振动的速度,通常以赫兹(Hz)为单位。
不同的通信系统使用不同的频率范围,频率的选择可以影响信号传输的距离和穿透能力。
6. 相位(Phase):相位是指信号振动的位置,通常用角度来表示。
相位的变化可以影响信号的相干性和接收质量。
在通信系统中,确保发送和接收设备具有相同的相位是至关重要的。
7. 偏移(Offset):偏移是指信号在时间上的错位,通常用来衡量时钟同步的精确度。
较小的偏移意味着发送和接收设备之间的时间同步性更好,可以减少数据传输中的错误。
8. 功率(Power):功率是指信号携带的能量,通常以瓦特(W)为单位。
较高的功率可以增加信号的传输距离和抗噪性,但同时也会增加能源消耗和系统成本。
9. 敏感度(Sensitivity):敏感度是指接收设备能够接收和解码的最小输入信号。
标题:深入探讨SNR、SNDR和SFDR的计算公式在现代电子设备和通信系统中,信噪比(SNR)、信噪失真比(SNDR)和无杂散动态范围(SFDR)是非常重要的性能指标。
它们反映了信号与噪声之间的相对强度和系统对信号失真的抵抗能力。
在本文中,我们将深入探讨这些指标的计算公式,以帮助读者更好地理解和评估各种电子设备和通信系统的性能。
一、信噪比(SNR)的计算公式信噪比(SNR)是衡量信号与噪声之间强度比例的指标,通常以分贝(dB)为单位。
其计算公式如下:SNR = 10 * log10(Psignal / Pnoise)其中,Psignal表示信号的功率,Pnoise表示噪声的功率。
通过该公式计算得到的信噪比值越大,表示信号相对于噪声更强,系统性能越好。
二、信噪失真比(SNDR)的计算公式信噪失真比(SNDR)综合考虑了信号、噪声以及失真对系统性能的影响,是一种更全面的性能指标。
其计算公式如下:SNDR = 10 * log10(Psignal / (Pnoise + Pdistortion))其中,Pdistortion表示失真的功率。
与信噪比不同的是,信噪失真比还考虑了失真对系统性能的影响,因此更能反映系统整体性能的优劣。
三、无杂散动态范围(SFDR)的计算公式无杂散动态范围(SFDR)是衡量系统对于杂散信号的抑制能力,也是一种非常重要的性能指标。
其计算公式如下:SFDR = 10 * log10(Psignal / Pspurious)其中,Pspurious表示杂散信号的功率。
无杂散动态范围越大,表示系统对杂散信号的抑制能力越强,系统性能越好。
总结回顾通过深入探讨信噪比(SNR)、信噪失真比(SNDR)和无杂散动态范围(SFDR)的计算公式,我们更好地理解了这些重要的性能指标。
在实际应用中,我们可以根据这些指标的数值来评估和比较不同系统和设备的性能,以便更好地满足需求和提升用户体验。
个人观点和理解我认为,深入理解和掌握这些性能指标的计算公式对于电子设备和通信系统的设计和优化非常重要。
接收机动态范围分析接收机动态范围(dynamic range)是指接收机在不同信号强度和干扰条件下能够正确接收和解码的信号的范围。
一个接收机的动态范围通常取决于以下几个因素:灵敏度、截获(capture)效应、频率选择性、IMD (互调失真)和信号到噪声比(SNR)。
首先,灵敏度是指在较低的信号强度下,接收机仍然能够接收和解码信号的能力。
接收机的灵敏度主要受到前置放大器和接收机的噪声系数的影响。
较低的噪声系数可以提高接收机的灵敏度,从而扩大其动态范围。
其次,截获效应是指在有两个或多个较强信号同时存在的情况下,接收机能够选择和解码正确的信号。
截获效应受到接收机的选择性和带宽的影响。
较好的选择性和合适的带宽可以降低多个信号之间的相互干扰,从而提高接收机的动态范围。
频率选择性是指接收机能够在特定频率范围内忽略掉其他频率信号的能力。
频率选择性主要由滤波器和调谐电路决定。
较好的频率选择性可以减少非目标信号的干扰,从而提高接收机的动态范围。
IMD是指在接收机中产生的互调失真。
当多个不同频率的信号同时存在于接收机的输入端时,它们会在非线性元件(如放大器)中相互干扰,产生互调失真。
互调失真会导致非目标信号的干扰,从而降低接收机的动态范围。
最后,信号到噪声比(SNR)是指目标信号和背景噪声之间的比值。
接收机可以通过信号处理和滤波来提高信号的质量和信噪比。
较高的信噪比可以提高接收机的灵敏度和动态范围。
总的来说,接收机的动态范围取决于其灵敏度、截获效应、频率选择性、IMD和信号到噪声比等因素。
通过合理设计和优化这些因素,可以扩大接收机的动态范围,提高其接收和解码信号的能力。
在实际应用中,理论分析、仿真和实测是评估和改进接收机动态范围的重要手段。
音频播放器的音质分析在现代科技的发展下,音频播放器成为了人们日常生活中不可或缺的设备之一。
无论是在外出旅行、运动健身,还是在家中休闲娱乐,人们都希望能够用到一个音质出色的播放器来享受高品质的音乐。
音质是衡量一个音频播放器好坏的重要标准之一。
一个优秀的音频播放器应该能够还原出真实的音频细节,使得听者可以更加真实、清晰地感受到音乐的魅力。
那么,我们如何来分析一个音频播放器的音质呢?首先,一个优秀的音质需要有高保真度。
高保真度的音质意味着播放器能够还原原始录制音频的真实音质。
这需要播放器具备优秀的解码能力,能够忠实地还原出音频中的每一个细节,包括声音的音调、音量和音色等。
其次,音频播放器的动态范围也是一个重要的指标。
动态范围是指播放器能够处理的最大和最小音频信号的区间。
一个良好的动态范围可以保证音频的细节在播放过程中得以完整表达,同时也能够避免声音过于尖锐、刺耳或者音量过低的问题。
此外,音频播放器的信噪比也需要被考虑。
信噪比是指音频播放器在播放声音时产生的噪音和原始音频信号之间的比值。
较高的信噪比可以使得听者在聆听音乐时不受到干扰,感受到更加清晰、真实的音质。
除了上述指标,音频播放器的失真程度也是一个值得关注的问题。
失真是指在音频播放过程中,播放器对原始音频信号进行了不正确的处理,导致音质的损失。
常见的失真包括谐波失真、交调失真等。
一个音质好的播放器应该尽可能减少失真程度,使得播放的音乐更加纯粹。
最后,影响音质的一个重要因素是所使用的音频编码格式。
不同的音频编码格式具有不同的压缩算法和数据处理方式,因此对音质的影响也不同。
常见的音频编码格式包括MP3、FLAC、AAC等。
优秀的音频播放器应能支持多种音频格式,并在解码过程中保持音质的高保真。
综上所述,音质是衡量一个音频播放器优劣的重要指标之一。
在选择音频播放器时,我们可以通过考察保真度、动态范围、信噪比、失真程度以及所使用的音频编码格式等因素来进行分析。
视频监控摄像机动态范围检测2011-4-7 来源:中国安防展览网摄像机动态范围的基本概念所谓宽动态实际是指摄像机同时可以看清楚图像最亮与最暗部分的照度比值。
而“动态范围”广义上说是指某一变化事物可能改变的跨度,即其变化值的最低端极点到最高端极点之间的区域,此区域的描述一般为最高点与最低点之间的差值。
摄像机的“动态范围”是指摄像机对拍摄场景中景物光照反射的适应能力,具体指亮度(反差)及色温(反差)的变化范围。
即表示摄像机对图像的最“暗”和最“亮”的调整范围,是静态图像或视频帧中最亮色调与最暗色调的比值。
而色调能呈现出图像或帧中的精准细节,作为两种色调的比值,动态范围的单位可以是分贝、比特、档,或者简单以比率或倍数来表示。
各种单位之间的换算方法如表1所示。
表1仅列出了20档动态范围,因为这几乎涵盖了人眼所能分辨的所有动态范围,超过这些档位的动态范围已没有太大的实际意义。
人眼之所以能分辨出跨度如此之广的动态范围,是因为人在观察实景时,瞳孔、虹膜、视网膜和相关肌肉会相互作用、动态调整,同时,大脑会将所有“曝光元素”整合为一幅连贯的图像,极其精准地反映出实景中十分明亮或十分暗淡的色调。
与人眼相比,对于标准CCD和CMOS图像传感器来说,所有感光单元的曝光(收集光子)时间都是相同的。
感光单元对景物明亮部分收集的光子较多,对阴暗部分收集的光子则较少。
但是,感光单元能够收集的光子数量却受到阱容量(wellcapacity)的限制,所以捕捉物体较亮色调的感光单元有可能会溢出或饱和。
为防止出现这种情况,可以减少曝光时间。
但如果这样做,捕捉物体较暗色调的感光单元可能又无法收集到足够多的光子。
因此,对于典型的单次曝光的图像传感器,其动态范围的上限受制于感光单元的阱容量,下限则受制于感光单元的信噪比。
因此,CCD摄像器件的动态范围是指其输出的饱和电压与暗场下噪声峰-峰电压之比,即动态范围=Usat/UNp-p(1)(1)式中,Usat为输出饱和电压;UNP-P为噪声的峰-峰值。
天目卫星参数1. 引言天目卫星是中国自主研发的一颗高分辨率光学遥感卫星,旨在为国家的资源环境监测、农业、城市规划、灾害监测等领域提供高质量的遥感数据。
本文将详细介绍天目卫星的参数,包括卫星的设计指标、技术特点和性能参数等。
2. 设计指标天目卫星的设计指标主要包括分辨率、覆盖范围、重访周期、星上设备等。
2.1 分辨率天目卫星的光学遥感传感器具有很高的分辨率,能够提供高质量的图像数据。
其空间分辨率达到X米/像素,可以清晰地辨别地表物体的细节。
2.2 覆盖范围天目卫星的覆盖范围广,可以覆盖全球范围内的任何地点。
通过卫星的轨道设计和姿态控制,可以实现对特定区域的重点观测,并提供连续的遥感数据。
2.3 重访周期天目卫星的重访周期是指卫星对同一地点的观测时间间隔。
天目卫星具有较短的重访周期,能够在较短的时间内获取到同一地点的多幅图像,有助于监测和分析地表变化。
2.4 星上设备天目卫星搭载了先进的光学遥感传感器和其他辅助设备,包括姿态控制系统、数据存储系统、通信系统等。
这些设备的优化设计和高效性能保证了卫星的稳定运行和数据的高质量。
3. 技术特点天目卫星具有一些独特的技术特点,使其在遥感领域具有竞争优势。
3.1 高光谱遥感天目卫星的光学遥感传感器具有高光谱分辨率,能够获取到更多波段的数据。
这使得天目卫星可以进行更精细的地物分类和光谱分析,提供更丰富的遥感信息。
3.2 多模式观测天目卫星支持多种观测模式,包括全色观测、多光谱观测和高光谱观测等。
这些观测模式的灵活切换和组合,使得天目卫星能够满足不同应用领域的需求,提供更多样化的遥感数据。
3.3 高效数据处理天目卫星搭载了先进的数据处理系统,能够快速高效地处理大量的遥感数据。
这保证了卫星能够实时获取、传输和存储大规模的遥感数据,为用户提供及时的数据支持。
3.4 高稳定性和可靠性天目卫星的姿态控制系统和其他关键设备具有高稳定性和可靠性。
在卫星运行过程中,能够保持良好的姿态稳定和工作状态,确保卫星的运行和数据采集的稳定性。
光电传感器的主要性能参数表征光电传感器性能的参数和其他型传感器类同,有灵敏度、检测限、时间响应特性和特定丁作条件下的一些参数。
这些性能参数依赖于光的波长不同而发生变化。
现对有关性能参数作些说明。
4.3.1 灵敏度(响应度,响应率)对于主要用于可见光波段的传感器,一直沿用流明灵敏度(lumen sensitivity)和勒克斯灵敏度(lux sensitivity)来表达。
定义为4.3.4 时间响应特性这是描述对光源辐射响应快慢的一个参数,测量时用阶跃响应和频率响应来衡量。
阶跃响应是指数函数时,传感器的响应率上升到峰值的0. 63或下降到峰值的0.37时所需要的时间,又称为传感器的时间常数。
但是传感器不一定都具有这样简单的阶跃特性,故不能统一都用时间常数的值来描述时间响应特性。
例如,有些传感器的时间响应特性不仅随光强的变化而变化,并且衡量时间常数的阶跃响应的上升时间或下降时间也不一致;还有的传感器为非线性特性等等。
对此,可分别用上升时间或下降时间来描述响应特性。
对于线性特性的传感器,常用频率响应来描述。
传感器的响应随光源辐射的调制频率而变化的特性称为频率响应。
4.3.5 内部阻抗处理微弱光时,传感器必须接上性能优良的前置放大器,来提高整个系统的信噪比。
在测定高速瞬态光时,要求前置放大系统的频带要宽。
为此,必须测定传感器的内阻抗(静态或动态阻抗),以达到传感器与前置放大系统的最优匹配。
4.3.6 信噪比与动态范围信噪比(S/N)是判断噪声大小通常使用的指标。
它是光电传感器输出的有用信号电流(或电压)与噪声电流(或电压)之比,一般取对数形式并乘以20,即以dB为单位,可表示为鱼一20 lg妻(4.16)N动态范围反映的是器件(如CCD)的工作范围。
它与信噪比有关,通常以饱和信号电压与均方根噪声电压之比表示。
4.3.7 暗电流暗电流是指在既无光入射,又无电注入情况下输出的一种电流。
它主要起因于热激励产生的电子一空穴对。
信噪比,定义当然很明白了,对于设备来说它的给出一定要靠实际测试得到。
就是正常输出信号(测试时具体给定)与同时产生的噪声的比较,=20log10(Uout/Unoise)
信噪比S/N指信号中原有部分和由于设备自身、环境干扰等原因造成的噪声的比例。
信号和噪声分别用电平表示,单位是Vrms或mVrms。
信噪比的单位是dB,计算公式是SN=20LOG(Vs/Vn)(不计权),其中Vs是信号电平,Vn是噪声电平。
采用对数计算是由于人耳的响度特性具有对数特征。
信噪比越大,说明系统的噪声和信号的差距越大,系统的特性就越好。
动态范围,是可以计算的。
就是设备的最大可测试(输出)值与最小可测试(输出)值的比较取自然对数。
所以单位都是dB.当然看得出两者区别还是很明显的。
与人眼相比,对于标准CCD和CMOS图像传感器来说,所有感光单元的曝光(收集光子)时间都是相同的。
感光单元对景物明亮部分收集的光子较多,对阴暗部分收集的光子则较少。
但是,感光单元能够收集的光子数量却受到阱容量(well capacity)的限制,所以捕捉物体较亮色调的感光单元有可能会溢出或饱和。
为防止出现这种情况,可以减少曝光时间。
但如果这样做,捕捉物体较暗色调的感光单元可能又无法收集到足够多的光子。
因此,对于典型的单次曝光的图像传感器,其动态范围的上限受制于感光单元的阱容量,下限则受制于感光单元的信噪比。
因此,CCD摄像器件的动态范围是指其输出的饱和电压与暗场下噪声峰-峰电压之比,即:
动态范围=Usat/UNp-p (1)
式中,Usat为输出饱和电压;UNP-P为噪声的峰-峰值。
显然,动态范围也可这样来定义和计算,即由CCD势阱中可存贮的最大电荷量和噪声所决定的电荷量之比;其数值也是输出端的信号峰值电压与均方根噪声电压之比(通常用dB 表示),即:
动态范围=USp-p/UNp-p (2)
式中,USp-p为输出信号峰值电压
动态范围= 全井容量/ 噪声 (Dynamic range = Full well capacity / read noise)
位元深度(bit depth)是一个所需的数值可以来表示整个动态范围。
比如动态范围是2300,那么需要12位的数值来表示,2^12-1 = 4095,而2^10-1=1023 < 2300 这里的12位就是一般说的科研相机的参数,10bit,12bit,14bit,16bit。