固定翼无人机
- 格式:docx
- 大小:7.89 MB
- 文档页数:20
无人机安全飞行知识:固定翼无人机无人机安全飞行知识一、安全飞行1.无人机的杀伤力2.常见炸机原因:手接无人机、射桨、错误打杆、水面飞行、其他作死行为(悬挂重物等)二、无人机飞行准备1.基础知识飞行模式:分为GPS模式、姿态模式、手动模式(智能无人机一般不具备)飞多高:相对高度500米飞多久:15-30分钟飞多远:500m (干扰源大)—2、3km飞多快:【HS】上升速度5m/s;下降速度3m/s【VS】水平速度16-20m/s2.飞行前检查内容①桨叶检查(是否正确安装,破损桨叶影响飞行器的平衡力)②电机检查(阻力是否均匀)③电池电量检查④遥控器电量检查⑤移动设备电量检查⑥确保插入microsd卡⑦遥控天线方向检查(横截面对准飞机,飞机所处位置不同时,调整遥控器手持方式和天线方向)⑧开机后电机是否正常运动⑨DJIGO4是否正常运行⑩摄像头是否清洁⑪模式切换开关(P档定位、S档运动、A档姿态)3.起飞步骤①放置于平坦地面,让机尾(电池)朝向自己,让机头(相机镜头)朝前②音量键打开,接收声音提示③在开阔场地飞行,GPS显示至少7颗卫星(实际上8颗)起飞时能够记录返航点,显示H字样④正确安装桨叶(黑圈白圈两种)⑤开机前必须取下云台扣(否则容易烧坏云台电机)⑥开启遥控器电源,再开启飞行器电源(短按→长按)⑦运行DJIGO4APP,连接移动设备和飞行器⑧等飞行器指示灯为绿灯慢闪,双手内八打杆启动电机,左手推油门杆起飞4.降落步骤①下拉油门杆使飞行器下降,当降落至离地面0.5米高时,飞行器悬停约1秒,此时需将油门杆拉到底使其降落至地面②落地后,将油门杆拉到最低的位置并保持3秒以上直至电机停止③停机后依次关闭飞行器和遥控器电源5.飞行器状态列表①IMU:气压计、加速度感应器、三向陀螺仪(取决于GPS,无GPS全部失效)②指南针(精灵系列指南针校准快捷键:快速拨6次飞行模式切换开关)③无线信道质量④飞行模式⑫控制模式(精灵系列遥控器对频快捷键:C1+C2+右拨轮)⑤GPS 信号(卫星数量)⑥返航高度(周围最高建筑高度+10-20米,根据实际情况设置)6.智能返航长按遥控器上返航按钮,短按可终止(或点击屏幕上STOP)低电量返航:电池低于30%提示,10s不操作自动返航失控返航:失控行为设置为“返航”,丢图传、断遥控、少卫星情况下3s不操作自动返航7.图传信道①自动选择(默认,容易出现卡顿、黑屏)②自定义(选择信号好的信道,特别是在市区飞)8.智能电池Li电池,标准3.3V,充满4.2V注意事项:电芯电压不可相差太大;电池温度会影响飞机起飞和飞机续航,电池续航会受风力影响9.云台模式FPV模式(第一人称视角)跟随模式(三轴稳定云台)10.限飞禁飞限飞区:提示限高120米禁飞区:起飞后20秒强行减速下降三、意外的处理和避免1.99%炸机的情况:无图传、遥控器断开、无GPS信号、指南针受干扰2.如何避免这四种情况同时出现:在视野开阔处起飞,如贴近大楼或环境干扰太大最好飞行中让同伴确定飞行器位置四、意外情况对应方案1.实时图传中断(丢失图传并不等于失去控制)保持飞行器悬停,重新进入相机界面,或者调整天线的摆放,或拉升高度,以重新获取图传,并操控飞行器飞回返航点。
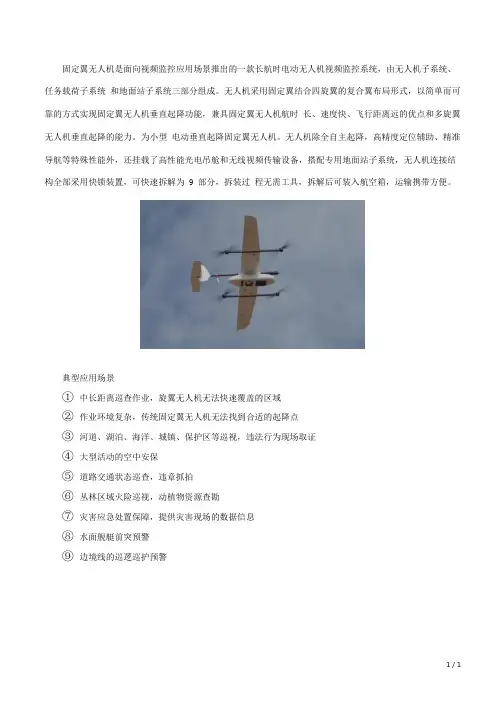
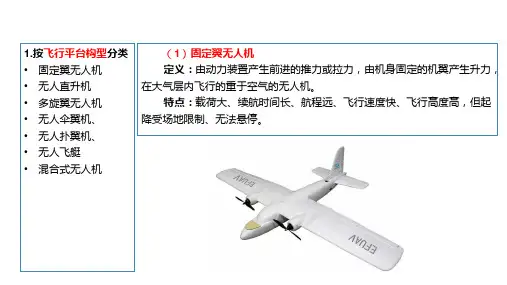
固定翼无人机是面向视频监控应用场景推出的一款长航时电动无人机视频监控系统,由无人机子系统、任务载荷子系统和地面站子系统三部分组成。
无人机采用固定翼结合四旋翼的复合翼布局形式,以简单而可靠的方式实现固定翼无人机垂直起降功能,兼具固定翼无人机航时长、速度快、飞行距离远的优点和多旋翼无人机垂直起降的能力。
为小型电动垂直起降固定翼无人机。
无人机除全自主起降,高精度定位辅助、精准导航等特殊性能外,还挂载了高性能光电吊舱和无线视频传输设备,搭配专用地面站子系统,无人机连接结构全部采用快锁装置,可快速拆解为 9 部分,拆装过程无需工具,拆解后可装入航空箱,运输携带方便。
典型应用场景
①中长距离巡查作业,旋翼无人机无法快速覆盖的区域
②作业环境复杂,传统固定翼无人机无法找到合适的起降点
③河道、湖泊、海洋、城镇、保护区等巡视,违法行为现场取证
④大型活动的空中安保
⑤道路交通状态巡查,违章抓拍
⑥丛林区域火险巡视,动植物资源查勘
⑦灾害应急处置保障,提供灾害现场的数据信息
⑧水面舰艇前突预警
⑨边境线的巡逻巡护预警
1 / 1。
固定翼无人机的基本结构1. 引言大家好,今天我们来聊聊固定翼无人机。
这玩意儿可真是科技的结晶,让人忍不住想一探究竟。
想象一下,它在空中自由翱翔的样子,就像是现代的“飞天小女警”,简直帅呆了!那么,这个飞行器到底是怎么运作的呢?咱们就从它的基本结构开始吧。
2. 机身2.1 机身的作用首先,咱们得说说机身。
它就像是无人机的“身体”,负责承载各种设备。
这部分通常是用轻质材料制造的,既要坚固,又要减轻重量。
你可以想象一下,像个大鸡翅膀,外面香香的,里面却藏着一堆“秘密武器”!。
2.2 机身的结构机身内部其实分成好几层,就像是一个三明治。
上层可能是用于控制的电路板,中间是电池,底下是用来固定传感器和摄像头的空间。
每个部分都有自己的“责任”,缺一不可,真是团队合作的典范!3. 翼3.1 翼的设计接着,我们来说说翼。
固定翼无人机的翅膀可不是随便做的。
它们的设计是为了提高空气动力学效率,减少飞行阻力。
这就好比你在水中划船,船头设计得流线型,才能更轻松地前进。
想象一下,它们就像是健身达人,展翅翱翔的时候可酷了!。
3.2 翼的材料大多数无人机的翼是用复合材料制成的,既轻又强。
用这种材料,就像在穿轻便的运动鞋,飞起来毫不费力。
再加上好看的涂装,哇,简直就是空中的艺术品!4. 动力系统4.1 发动机的选择说到动力系统,那是无人机飞行的“心脏”。
固定翼无人机一般有两种动力系统,电动和燃油。
电动的就像是你手里的电动玩具,静音又环保;而燃油的则像是一台猛兽,动力十足,能飞得更远。
就看你想要什么风格了!。
4.2 螺旋桨的重要性动力系统还少不了螺旋桨,没它们无人机就飞不起来。
可以想象成飞机的“手”,负责推动和转向。
不同的无人机可能有不同数量的螺旋桨,但都是为了保证飞行的稳定性和灵活性。
说真的,有时候看它们转动的样子,真让人觉得像是在跳舞,优雅又迷人!5. 传感器与控制系统5.1 传感器的多样性再来说说传感器。
固定翼无人机通常配备了多种传感器,比如摄像头、GPS、陀螺仪等。

固定翼无人机的设计及控制研究随着科技的不断发展,无人机已经成为了现代社会中越来越重要的一种无人系统,然而不同类型的无人机也有着不同的应用场景和技术难点。
其中,固定翼无人机是一种最基础的无人机类型,我们可以通过研究和优化固定翼无人机的设计和控制手段,进一步拓展无人机的应用领域,并提升无人机系统的可靠性和安全性。
一、固定翼无人机的结构设计固定翼无人机的结构设计主要涉及到机身、机翼、尾翼、推进器和传动机构等方面,其中机身的主要作用是为其他附加设备提供固定的安装点,尤其是电池等重要组件。
机翼则是固定翼无人机中最重要的组件之一,通常具有较小的扭转和变形,承担起机体的重量和气动力的支持,并起到起飞和降落的关键作用。
尾翼是固定翼无人机的另一重要组件,它通常包括水平尾翼和垂直尾翼两个部分,主要利用浮力和力矩控制机身的姿态和方向。
推进器则主要负责固定翼无人机空中推进和稳定,同时还能影响机体的姿态和方向。
最后,传动机构则主要包括电机、电调、螺旋桨等关键部件,它们的设计和动力系统的匹配是决定固定翼无人机最终性能的重要因素。
二、固定翼无人机的控制技术与常规的飞机相比,固定翼无人机需要更加精密的控制,以维持良好的稳定性和可控性。
通常,固定翼无人机的控制技术可分为飞行控制和姿态控制两个部分。
飞行控制主要由机载计算机控制,其主要作用是控制无人机在空中的航向、高度和速度等参数,从而保持稳定的飞行状态。
常见的飞行控制手段包括PID控制、模糊控制和神经网络控制等。
其中,PID控制基于机体的飞行状态和目标状态之间的差异进行补偿,可以实现快速有效的控制,并且易于实现和调整。
模糊控制则根据机体的运动状态和响应能力进行自适应控制,可以适应环境的变化和噪声干扰。
神经网络控制则利用深度学习和人工智能技术进行预测和控制,可以更加精准地控制无人机,但是需要更多的数据和计算资源。
姿态控制则主要由陀螺仪、加速度计和磁力计等传感器组成,它们可以测量无人机在空中的角度和方向,从而判断机体的姿态和方向。
固定翼无人机课程设计一、课程目标知识目标:1. 学生能够理解固定翼无人机的基本结构、原理和分类。
2. 学生能够掌握固定翼无人机的飞行原理、控制系统及安全操作规程。
3. 学生能够了解我国无人机产业及政策法规的基本情况。
技能目标:1. 学生能够操作固定翼无人机完成起飞、巡航、降落等基本动作。
2. 学生能够运用无人机飞行模拟软件进行飞行训练和任务规划。
3. 学生能够解决固定翼无人机飞行过程中遇到的基本问题。
情感态度价值观目标:1. 学生培养对航空科技的兴趣和热情,增强探索精神。
2. 学生树立安全意识,遵守无人机飞行相关规定,尊重他人隐私。
3. 学生提高团队合作能力,学会分享、交流和互助。
课程性质:本课程为选修课程,以实践操作为主,理论教学为辅。
学生特点:学生对新鲜事物充满好奇,动手能力强,有一定的团队合作意识。
教学要求:结合理论知识与实践操作,注重培养学生的实际操作能力和解决问题的能力,提高学生的安全意识和团队合作精神。
将课程目标分解为具体的学习成果,便于教学设计和评估。
二、教学内容1. 固定翼无人机概述- 无人机基本概念、分类及用途- 固定翼无人机的发展历程及未来发展趋势2. 固定翼无人机结构与原理- 无人机的基本结构及其功能- 飞行原理及空气动力学基础- 控制系统组成及工作原理3. 固定翼无人机飞行操作与控制- 飞行操作基本技能培训- 飞行模拟软件的使用与训练- 安全操作规程及紧急情况处理4. 固定翼无人机应用领域- 军事应用及民用领域- 无人机在航拍、农业、科研等领域的应用案例5. 我国无人机产业及政策法规- 无人机产业现状及发展趋势- 我国无人机相关政策法规及飞行管理规定教学大纲安排:第一周:无人机概述及发展历程第二周:固定翼无人机结构与原理第三周:飞行操作与控制基本技能第四周:飞行模拟软件训练与实践操作第五周:固定翼无人机应用领域及产业政策法规教学内容根据课程目标进行选择和组织,确保科学性和系统性。

固定翼无人机的使用流程英文回答:Fixed-Wing Drone Operation Procedure.1. Pre-Flight Preparation.Inspect the drone and ensure all components are in good working order.Charge the battery fully.Calibrate the autopilot system.Plan the flight path and obtain necessary airspace clearances.2. Take-Off.Position the drone on a flat, level surface.Enable the autopilot system.Gradually increase the throttle until the drone lifts off.3. In-Flight Operation.Monitor the autopilot system for proper operation.Maintain visual contact with the drone or use a ground station.Adjust flight parameters as needed (e.g., altitude, speed, waypoint navigation).4. Landing.Choose a suitable landing site.Gradually reduce the drone's altitude and speed.Land the drone smoothly on the ground.5. Post-Flight Procedures.Deactivate the autopilot system.Disconnect the battery.Inspect the drone for any damage.Log the flight data and review for any irregularities.Maintenance and Inspection.Regularly inspect the drone's components for wear and tear.Inspect the battery for damage or reduced capacity.Calibrate the autopilot system periodically.Follow the manufacturer's recommended maintenanceschedule.Flight Safety.Always operate the drone in accordance with applicable laws and regulations.Maintain a safe distance from obstacles and other aircraft.Be aware of wind conditions and airspace restrictions.Have a spotter present during flight operations for visual observation.Use a transponder to enhance visibility to other aircraft.中文回答:固定翼无人机使用流程。
垂直起降固定翼无人机组成结构
垂直起降固定翼无人机是一种具有高度灵活性和多用途性的飞
行器。
其独特的组成结构使其能够在狭小的空间中起降,并在空中以高速飞行。
该无人机通常由以下组成部分构成:
1. 机身:垂直起降固定翼无人机的机身通常由轻质材料如碳纤维、铝合金等制成。
机身内部装有电池、电机、传感器等关键部件,同时还具有良好的气动性能。
2. 翼面:翼面是垂直起降固定翼无人机的主要升力部件。
其结构一般为翼型、翼肋和翼桁的组合。
翼面采用高强度材料制成,例如玻璃纤维、碳纤维等。
在起降过程中,翼面能够实现垂直起降和悬停。
3. 垂直尾翼:垂直尾翼位于机身尾部,是控制飞机方向的关键部件。
垂直尾翼一般采用可调节桨叶或电动舵面进行控制。
4. 水平尾翼:水平尾翼位于翼面尾部,用于控制飞机俯仰运动。
水平尾翼一般采用可调节桨叶或电动舵面进行控制。
5. 起落架:垂直起降固定翼无人机的起落架通常包括两个可收放式轮子和一个降落伞。
在起飞和降落时,起落架能够提供良好的支撑和缓冲。
总之,垂直起降固定翼无人机的组成结构非常复杂,需要各个部件协同工作才能实现高度灵活性和多用途性。
未来随着技术的发展,无人机的组成结构将会变得更加复杂和多样化。
- 1 -。
垂直起降固定翼无人机的组成结构垂直起降固定翼无人机是由多个部分组成的。
主要包括机翼、起落架、动力系统、控制系统、传感器和通信系统。
机翼通常是固定翼无人机的主要结构,包括机身和翼面。
机身通常是由一系列框架组成,并且包括传统飞机的机身和尾翼。
翼面是机翼的承载结构,通常是由强度和轻量化材料制成。
这些材料可以是碳纤维、玻璃纤维或其他合成材料。
机翼的大小和形状会根据飞行任务和要求而有所不同。
起落架是支持垂直起降无人机着陆和起飞的基本组成部分。
这些起落架可以是三角形、双三角形或改进型着陆器。
这些起落架能够降低垂直起降的井弦形态,更好的支持重量分布。
动力系统通常是垂直起降无人机的重要组成部分。
这些无人机可以有三种主要类型的动力系统,分别是涡轮扇发动机、垂直推进系统和混合动力系统。
在涡轮扇发动机中,空气通过旋翼被推送向船尾。
在垂直推进系统中,机翼上方的流量被直接推入到底部的喷口中,从而提供升力。
混合动力系统甚至可能有多种类型的发动机。
控制系统是无人机中的核心组件之一。
这些系统包括传感器、计算机、无线电调制解调器和其他电子设备。
这些系统通过电子组件将数据传输到计算机中计算,从而使无人机在飞行过程中更加稳定。
传感器是垂直起降无人机面向任务应用时的重要组成部分。
包括GPS、IMU、气压计、激光雷达等等,通过满足相关的精度、准确性和重复性要求,实现当前小型化的无人机所需的飞行目标。
通信系统与控制系统紧密相关,并且能够在垂直起降无人机和相关设备之间传输数据。
这些系统通常包括无线电通讯设备或卫星系统。
它们提供了可靠的数据传输链路,以确保飞行过程中的即时性和准确性。
垂直起降固定翼无人机的组成结构是固定翼无人机中的关键部分之一。
这些组成部分使垂直起降无人机能够在空中稳定飞行并执行各种任务,从而实现在航空领域中的广泛应用。
民用轻小型固定翼无人机飞行控制系统通用要求随着无人飞行器的越来越普及,民用轻小型固定翼无人机的应用也日益广泛。
为了确保这些无人机的飞行安全性和可靠性,飞行控制系统是其中至关重要的一环。
本文将从通用要求的角度介绍民用轻小型固定翼无人机飞行控制系统的要求。
一、功能要求飞行控制系统应主要包括飞行控制计算机、姿态传感器、定位传感器、马达控制器等,并实现以下功能:1.飞行姿态控制飞行控制系统必须能够准确实时的获取飞行器当前的状态,如飞行姿态、速度、高度等,并保证飞行器在控制下能够稳定、精准的飞行。
2.自动驾驶飞行控制系统应该具备GPS导航能力,支持自动驾驶模式。
当用户选择自动驾驶模式时,飞行器能够根据预设的路径或者任务自主进行飞行。
3.安全保护飞行控制系统应该能够对飞行器进行各种安全保护,包括低电压自动降落、飞行器失联自主返航等应急措施。
二、性能要求1.精度高飞行控制系统应该具有高精度的飞行姿态控制能力,保证飞行器在动态环境下能够稳定飞行。
同时,定位传感器应该具备高精度的定位能力,能够实现高精度的自主导航和遥控飞行。
2.扩展性好飞行控制系统应该具备良好的扩展性,能够支持各种不同的传感器、通信设备等外部设备的集成,在不同环境下实现不同的功能。
3.容错性强飞行控制系统应具备容错性强的特点,确保在出现故障或者异常情况时,飞行器能够安全降落,并有一定的自动保护机制。
三、稳定性能1.防干扰性能好飞行控制系统应该抗干扰性能能够适应不同的环境要求,在干扰强烈的环境下能够保证稳定飞行。
2.抗振动能力强飞行控制系统应该具有良好的抗振能力,能够抵抗由外部环境带来的振动干扰,保证飞行器稳定飞行。
四、安全性能1.可靠性高飞行控制系统应具有高可靠性,避免出现故障或者异常情况,确保飞行器飞行安全。
2.保密性强飞行控制系统应具备保密性强的特点,确保无人机飞行的安全和保密。
总之,飞行控制系统是民用轻小型固定翼无人机的关键部分,需要具备高精度、高可靠性、高扩展性等多种性能要求,同时还需要能够适应不同的外部环境,确保飞行器的稳定飞行和安全性。
【原创】无人机概述系列(一)--固定翼的分类
作者:天途教育培训师吴星宇
固定翼作为无人机系统里三大飞行平台之一,针对不同的使用环境自然有不同的结构形态,今天我们来了解下行业中常见的固定翼类型。
一、常规布局所谓常规布局就是水平尾翼在主翼之后,除了水平尾翼的位置,主翼的位置不同也对飞机的布局产生影响:(一)上单翼指主翼安装位置在机身上方,具有较高的稳定性,但灵活性较差。
(二)中单翼指主翼安装位置在机身中部,兼具灵活性和稳定性(三)下单翼指主翼安装位置在机身下方,具有较高的灵活性,但稳定性较差。
二、鸭式布局鸭式布局为水平尾翼位于机翼之前,具有在大机动动作下,较好的空气动力性能。
三、无尾布局只有一对机翼,根据飞机本身应用环境,决定是否装有垂直尾翼。
固定翼无人机】固定翼的飞行教程及原理无人机按照不同的特点和用途可以被分为多种不同的类型。
其中,固定翼无人机是一种重要的无人机分类。
固定翼无人机与其他类型的无人机有着明显的区别,其飞行原理也有所不同。
固定翼无人机的基本特点固定翼无人机具有以下基本特点:固定翼结构:固定翼无人机采用类似传统飞机的固定翼结构,即有固定的机翼。
这种设计使得固定翼无人机在飞行时能够产生升力,并具备较好的飞行稳定性。
固定翼结构:固定翼无人机采用类似传统飞机的固定翼结构,即有固定的机翼。
这种设计使得固定翼无人机在飞行时能够产生升力,并具备较好的飞行稳定性。
长航时能力:相比其他类型的无人机,固定翼无人机具有较长的航时能力。
由于其飞行原理和设计特点,固定翼无人机能够以较低的能耗维持较长时间的飞行。
长航时能力:相比其他类型的无人机,固定翼无人机具有较长的航时能力。
由于其飞行原理和设计特点,固定翼无人机能够以较低的能耗维持较长时间的飞行。
长航时能力:相比其他类型的无人机,固定翼无人机具有较长的航时能力。
由于其飞行原理和设计特点,固定翼无人机能够以较低的能耗维持较长时间的飞行。
长航时能力:相比其他类型的无人机,固定翼无人机具有较长的航时能力。
由于其飞行原理和设计特点,固定翼无人机能够以较低的能耗维持较长时间的飞行。
大飞行距离:由于固定翼无人机的设计和推进方式,使得其具备较大的飞行距离能力。
这使得固定翼无人机在某些应用场景下具备更广泛的覆盖范围和更远的飞行能力。
大飞行距离:由于固定翼无人机的设计和推进方式,使得其具备较大的飞行距离能力。
这使得固定翼无人机在某些应用场景下具备更广泛的覆盖范围和更远的飞行能力。
大飞行距离:由于固定翼无人机的设计和推进方式,使得其具备较大的飞行距离能力。
这使得固定翼无人机在某些应用场景下具备更广泛的覆盖范围和更远的飞行能力。
大飞行距离:由于固定翼无人机的设计和推进方式,使得其具备较大的飞行距离能力。
这使得固定翼无人机在某些应用场景下具备更广泛的覆盖范围和更远的飞行能力。
无人机固定翼控制系统设计与仿真研究无人机是一种自主飞行的航空机器人,通常由航空飞行控制系统和其他外围传感装置、通讯系统等组成。
其中,控制系统是无人机的关键组成部分,它负责控制无人机的飞行姿态和航向,以实现无人机的自主飞行。
传统的无人机控制系统多数采用固定翼结构设计,因此本文主要探讨无人机固定翼控制系统设计与仿真研究。
一、固定翼无人机的基本结构和工作原理固定翼无人机基本结构主要包括机翼、机身、舵面和发动机等。
机翼是固定翼无人机的主要承载组件,可以提供升力和支撑力。
机身是固定翼无人机的主要结构,其内部安装了电路系统、传感器和能源装置。
舵面是由机身和机翼连接处伸出的可控制乘务飞行姿态的装置,包括升降舵和方向舵。
固定翼无人机的飞行原理是采用机翼产生升力,并通过舵面调节升力分布,以调整飞行姿态和航向。
无人机通常采用多种传感器来检测环境和自身状态,如陀螺仪、加速度计、磁力计、GPS等,以实现自主飞行控制。
二、固定翼无人机控制系统设计固定翼无人机控制系统设计包括硬件设计和软件设计两部分。
硬件设计主要包括电机、电调、遥控器、传感器等组成部分。
其中,电机和电调负责控制无人机的起降、加速、减速、爬升等动作,遥控器提供人工干预,传感器提供环境和自身状态反馈信号。
软件设计主要包括飞行控制器、自主导航算法、有人机通讯系统等模块。
其中,飞行控制器是无人机的核心控制模块,负责控制无人机的飞行姿态和航向,以及与其他模块的通信。
自主导航算法负责根据传感器反馈数据,为无人机提供飞行轨迹规划、路径选择、安全避障等功能。
有人机通讯系统包括数据链、图传、遥控等模块,与地面设备进行通讯。
三、仿真研究为了评估固定翼无人机控制系统的稳定性和性能,通常需要进行仿真研究。
仿真可以有效降低无人机试飞成本和飞行风险,同时也方便对控制策略进行实验和优化。
在仿真研究中,可以采用多种工具和方法。
例如,使用Matlab/Simulink等软件搭建控制系统的建模和仿真环境;使用ROS等机器人操作系统进行控制算法实验;使用Flightgear等自由飞行模拟器进行飞行模拟和虚拟制导。
固定翼无人机系统介绍 一、系统组成 黑鹰、黄蜂系列固定翼无人机系统由台湾碳基公司研制,因其优良的性能、模块化集成,目前已经广泛应用在测绘、地质、石油、农林等行业,具有广阔的市场应用前景。
黑鹰、黄蜂系列固定翼无人机系统由五个主要部分组成:机体结构、航电系统、动力系统、起降系统和地面控制站。
机体结构由可拆卸的模块化机体组成,既方便携带,又可以在短时间内完成组装、起飞。
航电系统由飞控电脑、感应器、酬载、无线通讯、空电电池组成,完成飞机控制系统的需要。
动力系统由动力电池、螺旋桨、无刷马达组成,提供飞机飞行所需的动力。 起降系统由弹射绳、弹射架、降落伞组成,帮助飞机完成弹射起飞和伞降着陆。 地面控制站包括地面站电脑、手柄、电台等通讯设备,用以辅助完成路线规划任务和飞行过程的监控。
黑鹰 黄蜂
黑鹰系统结构图: 黄蜂系统结构图:
地面站系统: 弹射、降落系统: 二、系统技术参数 黑鹰技术参数 指标 要求 重量 整套飞機重量低于4.5kg 材质 碳纤维
机体特点 具有相机镜头自动保护装置(降落時自动关闭),水气分离空速管,鼻锥罩及垂直尾翼有防撞泡棉 翼展 不大於1.6米 電池 15AH锂聚合物电池(11.1V,3S1P) 动力系统 无刷电动马达 航测相机 不低于2400万像素(全画幅相机 SONY RX1R) 尾翼高清视频 尾翼安装1080P高清视频记录仪 续航时间 70-90分钟(视相机重量及飞机拍摄高度而定) 抗风级数 蒲福风級 6 級 (39 – 49 公里/小時) (22 – 27 节) 抗雨 蒲福雨級 4 級 起飞 弹射绳与放置架 降落 降落伞
通讯频率 434/868/912 MHz(有7个频段可选择,容许同一空域有多架飞机同时执行任务。 分辨率 地面像素分辨率5cm
拍摄面积 5平方千米(GSD 5cm) 10平方千米(GSD 10cm) 14平方千米(GSD 15cm) 地面操控软件 1、全中文菜单 2、基于GOOGLE地图设置、规划航线(也可以根据客户需要定制其他格式底图) 3、操控软件中包括飞行前的安全检测系统 系统组成 飞控系统、地面导控系统、摄影系统各一套
授权与技术支持 必须提供制造厂家针对本项目专项授权,投标人在河南有经当地审计部门审核的技术支持机构。 黄蜂技术参数 重量 整套飞機重量低于2kg 材质 发泡聚丙烯及碳纤维增强结构 机体特点 一体化机身,无需拆卸。 尺寸 100×65×10cm 電池 8000mAH锂聚合物电池(11.1V) 动力系统 无刷电动马达;300W.后推式 续航时间 45分钟(视相机重量及飞机拍摄高度而定) 相机 选配2470万像素或2030万像素 抗风级数 蒲福风級 4 級以下 抗雨 小雨 起飞 弹射绳或放置架 降落 降落伞
通讯频率 434/868/912MHz(有7个频段可选择,容许同一空域有多架飞机同时执行任务。 分辨率 地面像素分辨率5cm
拍摄面积 3平方千米(GSD 5cm) 5平方千米(GSD 10cm) 10平方千米(GSD 15cm) 地面操控软件 1、全中文菜单 2、基于GOOGLE地图设置、规划航线(也可以根据客户需要定制其他格式底图) 3、操控软件中包括飞行前的安全检测系统 系统组成 飞控系统、地面导控系统、摄影系统各一套 系统升级性 预留载具的空间,可以升级安裝高清视频装备。
授权与技术支持 必须提供制造厂家针对本项目专项授权,投标人在***省有经当地审计部门审核的技术支持机构。 三、系统特性 1、机体模块化 方便拆卸,便于携带 组装简单,快速任务
2、简易、安全的起降系统 — 弹射起飞(人工或弹射架弹射) — 降落伞降落
3、完整的飞前检核系统 — 步步检核,系统自动通过 — 避免人为的错误操作 4、全自动驾驶 — 可按照多种模式自动执行飞行拍摄任务 — 可配合人工操控,规避风险,提高环境适应能力
5、工业级设计 — 采用高强度材料,机身抗磨损 — 防风、防雨、防雪设计,适应目前民用无人机领域所能承受的最苛刻的环境 6、良好的空地通讯能力 — 实时的数据上链、下链通讯 — 可选配全向型或指向型天线,可执行超远距离飞行作业
7、自由航线规划 — 可进行区域飞行 — 可延条带状线路飞行 四、固定翼无人机应用 1)灾害监测 我国很多地区都处于地质灾害多发的地带,空难、海难、城市灾害等救援和灾情监测对时间的要求都十分紧迫,无人机系统作为快速的响应手段,可以用于各种地质灾害的监测,如山体滑坡、洪涝灾害、堰塞湖监测、泥石流灾害,可以完成灾区受灾面积计算、山体崩塌的土石方量计算、灾区损毁房屋位置的定位和灾区三维可视化及分析。
2)环境监测 随着国家生态化建设的需求,环保部门急需快速监测手段进行各类污染源及其扩散态势的监测,为环境治理提供依据,无人机系统的机动灵活、低成本和高精度对于区域性环境监测十分有利。 3)城镇规划 中国城市化发展迅速,目前有数以万计的小城镇规划缺乏高精度空间信息源。采用常
规航空摄影手段不经济、采用人工测量手段条件困难,无人机直升遥感系统可为1:500、1:1000、1:2000、1:5000规划制图经济、快速的提供数据源。
4)巡检调查 采用无人机进行航拍或实时视频回传,可以用于线路、设施的巡检调查。比如电力线的巡检、石油管道的巡检、机场周边空中巡查、警方空中稽查等。 五、数据成果展示 5.1原始照片数据 5.2飞行POS数据
5.3相机检校文件 5.4像控点文件 5.5数据成果
房屋没有任何变形 除了还可以得到1:1000、1:2000的DOM数据之外,还可以得到同比例尺的DEM、DLG等数据。 六、标准化操作流程
6.1黑鹰操作流程 1、选择合适地点,固定弹射绳前方两枚铆钉。(铆钉上部稍倾斜,延铆钉—弹射架直线,偏离弹射架30°)用拉力计测试铆钉可以承受35 KG的拉力。
2、用拉力计,将无弹力绳(单绳)拉到32 KG的位置并记录,慢慢松掉弹力绳。 3、组装弹射架,将弹射架后支架放在32 KG的位置,固定弹射架后方一枚铆钉。 4、飞行员甲拉弹力绳到弹射架处,保证飞行员乙拉无弹力绳到弹射架发射器处,并插上保险。
5、飞行员甲到弹射架前方,判断弹射绳是否在弹射架的正中央。如果不在,飞行员乙配合调整到正中央,然后二人配合,慢慢松掉弹力绳,用锤子将前方两枚铆钉再锤几下,确认固定。
6、飞行员甲组装地面站,包括电台、全向型天线、指向型天线、遥控手柄,检查电台频道。
7、飞行员乙组装飞机,包括机头、机尾、两翼、相机、无人机电池、降落伞。检查POS记录卡和相片记录卡都清空。
8、甲乙配合,进行飞机调平。 9、乙按压电池至固定,将线理顺,放伞。 10、乙上空电,副翼用扭力扳手拧紧(3下),按下按钮,关伞盖。 11、甲按下电台按钮,开始联测。 12、步骤一:上空电 步骤二:检查状态 步骤三:开伞测试 步骤四:开相机,酬载测试 步骤五:测姿态 步骤六:测罗盘 步骤七:GPS状态检查 步骤八:设置十二点钟方向,记录地面高度(相对高度模式OFF) 步骤九:设置归航点方向,距离(标准300),高度(地高+150) 步骤十:设置降落点方向,距离(标准20~50),高度(30、40) 步骤十一:开启任务,上传任务 步骤十二:测空速 步骤十三:展平桨叶,上动力电 步骤十四:乙测试马达 步骤十五:起飞模式(RPV或自动区域空照) 离开后,确认状态灯都为绿色,试一下手柄滚转操作 13、将弹射绳拉至弹射架,固定好,装上保险插销。 14、乙将飞机放上弹射架,摆平,放在正中央。 15、乙按下动力按钮。 16、起飞:乙拔掉安全插销,判断风没问题,踩下发射。飞机飞出去之后,正常上升,甲即可接手手控;若没正常上升,甲手动开伞。
17、乙将高度设置到任务高度,甲手控飞机盘旋上升。 18、到达任务高度后,乙将模式切换为静默区域空照,激活。甲停止手控。 19、整个飞行过程根据信号强弱,切换定向、指向天线。 20、飞机归航到达指定高度时,甲激活RPV,手控降落。 21、降落后,甲负责找回飞机,乙确保在飞机回来之前不要有人碰到电脑。拿飞机的时候,先将伞收起来,然后断动力电、断空电、关相机,然后将飞机带回来。
22、飞完后,收拾东西的时候,二人分开收拾。甲收拾地面站的东西,乙收拾飞机的东西,最后收弹射架,以免漏收配件。 6.2黄蜂操作流程 1、选择合适地点,固定弹射绳前方一枚铆钉。(铆钉上部稍倾斜,延铆钉—弹射架直线,偏离弹射架30°)用拉力计测试铆钉可以承受25 KG的拉力。
2、用拉力计,将无弹力绳(单绳)拉到22 KG的位置并记录,慢慢松掉弹力绳。 3、组装弹射架,将弹射架后支架放在22 KG的位置,固定弹射架后方一枚铆钉。 4、飞行员甲拉弹力绳到弹射架处,保证飞行员乙拉无弹力绳到弹射架发射器处。 5、飞行员甲到弹射架前方,判断弹射绳是否在弹射架的正中央。如果不在,飞行员乙配合调整到正中央,然后二人配合,慢慢松掉弹力绳,用锤子将前方两枚铆钉再锤几下,确认固定。
6、飞行员甲组装地面站,包括电台、全向型天线、指向型天线、遥控手柄,检查电台频道。
7、飞行员乙安装飞机天线,电池,相机,降落伞。检查POS记录卡和相片记录卡都清空。 8、甲乙配合,将检查表内容都检查一遍。 9、甲按下电台按钮,开始联测。 10、步骤一:上空电 步骤二:检查状态 步骤三:开伞测试 步骤四:开相机,酬载测试 步骤五:测姿态 步骤六:测罗盘 步骤七:GPS状态检查 步骤八:设置十二点钟方向,记录地面高度(相对高度模式OFF) 步骤九:设置归航点方向,距离(标准300),高度(地高+150) 步骤十:设置降落点方向,距离(标准20~50),高度(30、40)