非完整约束轮式移动机器人运动控制系统研究
- 格式:pdf
- 大小:277.18 KB
- 文档页数:4
0引言世界技能大赛由世界技能组织举办,被誉为“技能奥林匹克”,是世界技能组织成员展示和交流职业技能的重要平台,比赛项目共分为6个大类,分别为结构与建筑技术、创意艺术和时尚、信息与通信技术、制造与工程技术、社会与个人服务、运输与物流。
移动机器人项目属于制造与工程技术领域的赛事之一,随着制造业的转型升级,技能人才的培养也扮演着越来越重要的角色,为了更好地推广移动机器人项目,让更多的院校参与世界技能大赛,让更多的学生学会利用自动控制技术设计世界技能大赛所需的移动机器人,笔者将几年来对移动机器人电机控制、运动规划方面的一些技巧及实现做了总结,旨在让更多的参与者快速学会对移动机器人的控制,更好地推动移动机器人相关专业的发展。
1系统组成1.1系统基本构成世界技能大赛移动机器人项目一般要求参赛队伍所制作的移动机器人具有较为灵活的移动能力,为了满足这一条件,普遍采用全方位移动的机器人设计。
全方位移动机器人具有全方位运动能力,其实现方式关键在于全方位的轮系结构,该结构具备每一个大轮边缘套有小轮的机构,能够避免普通轮系不能侧滑带来的非完整性运动限制,从而实现全方位运动。
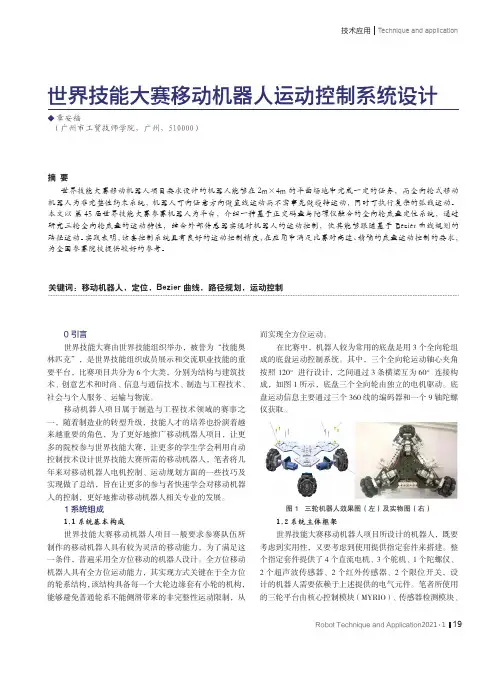
在比赛中,机器人较为常用的底盘是用 3 个全向轮组成的底盘运动控制系统。
其中,三个全向轮运动轴心夹角按照 120°进行设计,之间通过3条横梁互为60°连接构成,如图1所示,底盘三个全向轮由独立的电机驱动。
底盘运动信息主要通过三个360线的编码器和一个9轴陀螺仪获取。
图1 三轮机器人效果图(左)及实物图(右)1.2系统主体框架世界技能大赛移动机器人项目所设计的机器人,既要考虑到实用性,又要考虑到使用提供指定套件来搭建。
整个指定套件提供了4个直流电机、3个舵机、1个陀螺仪、2个超声波传感器、2个红外传感器、2个限位开关,设计的机器人需要依赖于上述提供的电气元件。
笔者所使用的三轮平台由核心控制模块(MYRIO)、传感器检测模块、世界技能大赛移动机器人运动控制系统设计 章安福(广州市工贸技师学院,广州,510000)摘 要世界技能大赛移动机器人项目要求设计的机器人能够在2m×4m的平面场地中完成一定的任务,而全向轮式移动机器人为非完整性约束系统,机器人可向任意方向做直线运动而不需事先做旋转运动,同时可执行复杂的弧线运动。
轮式移动机器人运动学基础,自由度计算
轮式移动机器人的运动学基础包括轮式移动机器人的运动学模型、运动学约束和运动学控制等方面。
其中,自由度计算是其中比较重要的一部分。
首先,轮式移动机器人的运动学模型可以分为非完整模型和完整模型。
其中,非完整模型指的是机器人的所有约束都不完整,例如,机器人在运动时可以在任
意方向上运动;而完整模型指的是机器人的所有运动都受到一定的限制,例如,机器人在运动时只能沿着特定的路径运动。
其次,轮式移动机器人的运动学约束还包括机器人的几何约束和运动约束。
其中,几何约束指的是机器人在运动时必须满足的形态约束,例如,机器人在运动时必须保持平稳;而运动约束指的是机器人在运动时必须满足的运动约束,例如,机器人在运动时必须按照预定的运动路径运动。
最后,轮式移动机器人的运动学控制包括轮式移动机器人的动力学控制和运动学控制。
其中,动力学控制指的是机器人在运动时要满足机器人的动力学约束,
例如,机器人在运动时必须保持平稳;而运动学控制指的是机器人在运动时要满足机器人的运动学约束,例如,机器人在运动时必须按照预定的运动路径运动。
综上所述,轮式移动机器人的运动学基础涉及到轮式移动机器人的运动学模型、运动学约束和运动学控制等方面,其中,自由度计算则是其中比较重要的一部分。
非完整轮式移动机器人反演滑模轨迹跟踪控制器设计杨敏;梅劲松;廖里程【摘要】For tracking the trajectory of wheeled mobile robots, a backstepping-based sliding-mode control scheme is presented. An equivalent control law is obtained by using Pl-type sliding surface and a switching control law is gotten by replacing sign function by variable rate function. The stability of the system is proved by Lyapunov theory. Simulation results show the effectiveness and cor-rectness of the proposed method and the improvement of the chattering phenomenon in the system. Even though external disturb-ances exist, the proposed approach is of a satisfactory control quality.%针对轮式移动机器人的轨迹跟踪问题,提出了一种反演滑模控制方法。
采用PI型滑模面设计等效控制律,利用变速函数代替了符号函数得到切换控制律,并利用Lypunov定理证明了系统的稳定性。
仿真结果表明了该方法的有效性和正确性,控制中出现的抖振现象得到改善,在外界干扰影响下,也具有良好的控制品质。
【期刊名称】《机械制造与自动化》【年(卷),期】2015(000)005【总页数】4页(P152-154,196)【关键词】轮式移动机器人;反演;滑模控制【作者】杨敏;梅劲松;廖里程【作者单位】南京航空航天大学自动化学院,江苏南京210016;南京航空航天大学自动化学院,江苏南京210016;南京航空航天大学自动化学院,江苏南京210016【正文语种】中文【中图分类】TP242近年来,非完整移动机器人的运动控制一直是控制工作者研究的热点。
一、绪论(一)引言移动机器人技术是一门多科学交叉及综合的高新技术,是机器人研究领域的一个重要分支,它涉及诸多的学科,包括材料力学、机械传动、机械制造、动力学、运动学、控制论、电气工程、自动控制理论、计算机技术、生物、伦理学等诸多方面。
第一台工业机器人于20世纪60年代初在美国新泽西州的通用汽车制造厂安装使用。
该产品在20世纪60年代出口到日本,从20世纪80年代中期起,对工业机器人的研究与应用在日本迅速发展并步入了黄金时代。
与此同时,移动机器人的研究工作也进入了快速发展阶段。
移动机器人按其控制方式的不同可以分为遥控式、半自动式和自主式三种;按其工作环境的不同可以分为户外移动机器人和室内机器人两种。
自主式移动机器人可以在没有人共干预或极少人共干预的条件下,在一定的环境中有目的的移动和完成指定的任务。
自主式移动机器人是一个组成及结构非常复杂的系统,具有加速、减速、前进、后退以及转弯灯功能,并具有任务分析,路径规划,导航检测和信息融合,自主决策等类似人类活动的人工智能。
(二)移动机器人的主要研究方向1.体系结构技术1)分布式体系结构分布式体系结构【1。
2.3】是多智能体技术在移动机器人研究领域的应用。
智能体是指具有各自的输入、输出端口,独立的局部问题求解能力,同时可以彼此通过协商协作求解单个或多个全局问题的系统。
移动机器人系统,特别是具有高度自组织和自适应能力的系统,它们的内部功能模块与智能体相仿,因此可以应用多智能体技术来分析和设计移动机器人系统的结构,实现系统整体的灵活性和高智能性。
在分布式体系结构中,各个功能模块具有不同的输入输出对象和自身的不同功能,并行各工作,整个系统通过一个调度器实现整体的协调,包括制定总体目标、任务分配、运动协调和冲突消解等。
2)进化控制体系结构面对任务的复杂性和环境的不确定性以及动态特性,移动机器人系统应该具有主动学习和自适应的能力。
将进化控制的思想融入到移动机器人体系结构的设计中,使得系统哎具备较高反应速度大的同时,也具备高性能的学习和适应能力。
受非完整性约束的移动机器人路径跟踪算法郁伉;肖本贤;李艳红【摘要】文章讨论了受非完整约束限制的两轮差动驱动机器人的路径跟踪问题,研究移动机器人在一个运动周期内的轨迹,找出该周期内机器人起点坐标和终点坐标之间的联系,推导出一种新模型;针对机器人跟踪任意期望几何路径,提出了斜率算法;对于期望路径是圆弧的特例,提出曲率半径算法,进一步提高跟踪速度平稳性和跟踪精度.【期刊名称】《合肥工业大学学报(自然科学版)》【年(卷),期】2010(033)009【总页数】5页(P1315-1319)【关键词】路径跟踪;运动周期;曲率;两轮差动驱动机器人;非完整系统【作者】郁伉;肖本贤;李艳红【作者单位】合肥工业大学,电气与自动化工程学院,安徽,合肥,230009;合肥工业大学,电气与自动化工程学院,安徽,合肥,230009;咸阳师范学院,物理系,陕西,咸阳,712000【正文语种】中文【中图分类】TP240 引言由于存在非完整约束,移动机器人路径跟踪控制十分具有挑战性。
文献[1]对系统在期望路径附近Taylor线性化,对得到的线性时变系统设计控制律,从而实现原系统的局部跟踪;文献[2]采用输入输出反馈线性化的方法,将非线性系统分解为2个子系统,再根据性能指标逐一设计控制律,以达到跟踪目的;文献[3]采用后退(back steping)方法的思想,将系统分解为低阶系统,利用中间虚拟变量和部分Lyapunov函数,设计了具有全局渐进稳定的跟踪控制器。
目前常见机器人模型有运动学模型、动力学模型以及位姿误差模型。
自文献[4]提出位姿误差模型以来,还很少见到新的模型。
本文针对两轮差动驱动移动机器人,在仔细分析其工作过程的基础上,推导出新的模型,并给出2种算法。
该模型在表达式上具有运动学模型简洁的优点,经过简单变换,得到1个运动周期内机器人位姿误差。
2种算法针对机器人初始位置在期望路径附近,相对于传统的基于Lyapunov函数的控制律设计,不必计算大量偏导数,在保证跟踪精度、跟踪速度的前提下,具有计算量小的优点;和反馈线性化算法相比,不存在奇异性问题[5]。
轮式机器人运动原理目的本文介绍轮式移动机器人的镇定和跟踪控制理论和方法入门。
这里提到的移动机器人主要是指像汽车这种采用轮子移动的机器人。
在我们有生之年就能看到路上的汽车变成一个个移动机器人。
1 前言如果你经常看历史剧可能会注意到一个有意思的现象,不管是中国还是外国,古代的车几乎都是两轮形式的,超过两轮的车不是很常见。
这是为什么呢?究其原因当然有很多,但最主要的可能是古人一直没弄明白多车轮(三轮以上)的车怎么拐弯。
可别小看这个问题,拥有多个车轮的车辆转弯不是那么容易的,每个车轮的速度、角度必须满足特定的几何关系。
在人类文明史上,车轮的发明是个重大突破,怎么把多个车轮组合起来用好也是个挑战,本文结合最近的理论成果探讨一下其中的难点和方法。
“控制”是一个有些被用烂了的词汇,它的含义太广了。
所以首先要明确,当我们在谈论控制时我们到底在谈什么?和大多数的控制系统一样,移动机器人的控制任务也可以简单分成以下两种:1 镇定:控制机器人到达并稳定在某个静止的状态,实际生活中的例子就是把汽车停到一个指定的停车位里。
2 跟踪:控制机器人跟随某个运动着的状态(即轨迹),实际生活中的例子就是让汽车沿着车道中心线行驶。
★ \bigstar ★这两个任务哪个更难呢?即便缺少机器人控制的常识,完全根据经验判断,对于机械臂来说,控制它稳定到某个状态比控制它跟踪一个空间轨迹更简单,所以很多人理所当然地认为轮式移动机器人的“镇定”比“跟踪”更简单。
但是实际情况是镇定更难,这是由于运动约束的存在 [ 1 ] ^{[1]} [1]。
也就是说轮式移动机器人和机械臂的控制难度刚好反过来了。
哈哈!没想到吧。
2 汽车模型一般的汽车都是四轮形式,为了实现顺畅地转向,前轮采用艾克曼转向机构,后轮采用差速器。
在大多数论文中,一般把四轮汽车用两轮的自行车模型描述,这样的简化不改变问题的本质,而且在数学上处理更方便。
这样得到的模型可以用式( 1 ) (1) (1)所示的方程来描述,称为车辆的简化运动学方程。
第37卷第7期2020年7月控制理论与应用Control Theory&ApplicationsV ol.37No.7Jul.2020非完整轮式机器人的鲁棒同步编队跟踪及镇定控制周竞烨,李家旺†,邸青,方凯,姚佳琪,黄汉涛(宁波大学海运学院,浙江宁波315211)摘要:本文研究了受到建模不确定性影响和输入限制的非完整轮式机器人的同步编队跟踪和编队镇定问题.首先,基于领航–跟随策略,确定了编队构型的数学表达形式.其次,通过定义含有辅助控制量的跟踪误差,设计了一种具有统一结构的分布式运动学控制器,可使跟随者实现对复杂期望轨迹的跟踪,包括时变轨迹和固定点等.然后,针对建模不确定性影响和输入限制,基于反步法、模糊控制方法和Lyapunov控制理论,设计了一种饱和动力学控制器,使得系统的闭环跟踪误差全局收敛至零点附近有界领域内.最后,通过对比仿真实验,验证了本文控制方法的有效性.关键词:非完整轮式机器人;编队控制;跟踪;镇定;模糊控制引用格式:周竞烨,李家旺,邸青,等.非完整轮式机器人的鲁棒同步编队跟踪及镇定控制.控制理论与应用, 2020,37(7):1461–1470DOI:10.7641/CTA.2020.90260Robust simultaneous formation tracking and stabilization ofnonholonomic wheeled mobile robotsZHOU Jing-ye,LI Jia-wang†,DI Qing,FANG Kai,YAO Jia-qi,HUANG Han-tao (Faculty of Maritime and Transportation,Ningbo University,Ningbo Zhejiang315211,China) Abstract:This paper addresses the control problem of simultanous formation tracking and formation stabilization for nonholonomic wheeled mobile robots(NWMRs)subjected to modeling uncertainties and input constraints.Firstly,a mathematic model of formation configuration is presented via leader-follower formation strategy.Secondly,by defining a modefied expression of tracking errors with auxiliary control variables,a unified distributed kinematic controller for each follower is designed,which can realize the tracking for complex reference trajectories,including time-varying trajectories andfixed points.Thirdly,for the purpose of avoiding the difficulties caused by modeling uncertainties and input constraints, by utilizing the back-stepping technique,fuzzy control method and Lyapunov’s control theory,a saturated dynamic con-troller is presented,which can guarantee the closed-loop tracking errors of each follower globally converge to a bounded neighborhood of the origin.Finally,the effectiveness of the proposed controller is validated by means of comparative simulations.Key words:nonholonomic wheeled mobile robots;formation control;tracking;stabilization;fuzzy controlCitation:ZHOU Jingye,LI Jiawang,DI Qing,et al.Robust simultaneous formation tracking and stabilization of nonholonomic wheeled mobile robots.Control Theory&Applications,2020,37(7):1461–14701引言近年来,非完整轮式移动机器人(nonholonomic wheeled mobile robot,NWMR)编队控制在相关领域受到了越来越多的关注,并在安全救援、侦察任务、矿物勘探、巡逻防卫等方面得到了广泛的应用.目前, NWMR的编队控制方法主要有领航–跟随法[1–4]、虚拟结构法[5–6]、基于行为法[7–8]等.由于NWMR是一种典型的非完整系统,其编队控制问题一般会分为独立的两类子问题:编队跟踪和编队镇定.在编队跟踪问题中,要求编队的期望轨迹满足持续激励条件,即期望速度或角速度应不恒等于零.如文献[9]设计了一种自适应神经网络控制器以实现NWMR的编队跟踪控制方法.文献[10]中提出了一种级联跟随法,可实现直线编队控制.文献[11]针对含有未知信息的NWMR编队跟踪控制问题,提出了一种确定学习控制方法以改善控制性能.文献[12–13]利用反收稿日期:2019−04−17;录用日期:2020−03−07.†通信作者.E-mail:*****************.cn;Tel.:+86183****7971.本文责任编委:武玉强.国家自然科学基金项目(51309133)资助.Supported by the National Natural Science Foundation of China(51309133).1462控制理论与应用第37卷步法实现了移动机器人编队的精确跟踪控制.文献[14]通过引入激励函数形式实现了非完整系统的编队跟踪控制.针对编队镇定问题,文献[15]设计了一种光滑时变分布式控制以实现欠驱动船舶的编队镇定控制.文献[16]通过引入一种δ-持续激励函数,实现了多机器人的渐近编队镇定.然而,在实际的NWMR 编队作业任务中,期望轨迹往往具有一定的复杂性,即可能包含时变轨迹和固定点等.此时,采用单一的编队跟踪或编队镇定方法均无法实现整体控制目标,而通过多个控制方法进行切换则可能导致控制系统不稳定或失效.因此,设计出一种具有统一结构形式的NWMR 编队控制策略,以实现同步跟踪和镇定,对于NWMR 编队的具体应用具有重要的意义.目前,就笔者所知,尚无有关同步实现非完整系统编队跟踪和编队镇定的研究成果的报道,相关研究仅针对单个非完整系统.如文献[17]对单个NWMR 设计了一种饱和动力学控制器以实现同步跟踪和镇定控制,但其对于初始状态较为敏感.文献[18]和文献[19]设计了一种饱和输入下的运动状态转化策略,也同步实现了对轨迹的精确跟踪和固定点的镇定,但控制器形式较为复杂.文献[20]针对速度受限的NWMR 提出了一种跟踪和镇定统一运动学控制器,忽略了动力学影响.但需要指出的是,上述研究成果直接应用至非完整系统的编队控制问题上无法保证其控制性能.基于上述分析,本文针对NWMR 编队的同步跟踪和镇定控制问题进行了理论和仿真研究.考虑到实际情况,本文在NWMR 数学模型中加入模型参数不确定性和输入饱和限制的影响.基于领航–跟随编队策略,定义了NWMR 的编队结构数学表达形式,并确定了每个跟随者的期望轨迹;考虑到NWMR 的非完整约束所引起的控制困难[21–22],为了实现跟随者对复杂期望轨迹的跟踪,定义了一种含辅助控制量的跟踪误差表达式,并设计了具有统一结构形式的运动学控制器.针对参数不确定性和输入饱和限制,基于模糊控制理论,设计了一种NWMR 的饱和动力学控制器,使得跟踪误差能够收敛至零点附近的小邻域内,同时具有较好的抗饱和性和鲁棒性.最后通过仿真实验对所提出的控制方法的性能进行了验证.2问题描述2.1NWMR 模型考虑多个相同的NWMR 组成的系统.单个NWMR 结构如图1所示.图中:r 为主动轮半径,b 为NWMR 主体半宽,d 为NWMR 质心P c 到主动轮中心P 0的距离,(x,y )和φ分别表示NWMR 的质心位置和首向角.第i 个NWMR 的运动模型可以描述为[17]{˙ηi =R (φi )ωi ,M ˙ωi +C (˙φi )ωi +Dωi +τd i =G (τi ),(1)其中:ηi =[x i y i φi ]T ,ω=[ω1ω2]T 为主动轮角速度;τd i ∈R 2为外界干扰项;G (τi )=[g (τ1i )g (τ2i )]T 为主动轮的有界控制转矩,其定义如下:g (τji )=min(τM sgn τji ,τji ),j =1,2,(2)式中:τM >0是主动轮转矩的饱和值,sgn(·)为标准符号函数.图1非完整轮式机器人Fig.1Nonholonomic wheeled mobile robot此外,矩阵R (φi ),M,C (˙φi )和D 定义如下:R (φi )=r 2 cos φi cos φisin φi sin φi b −1−b −1,M =[m 11m 12m 12m 11],C (˙φi )=[0cw i −cw i 0],D =[d 1100d 22],其中:m 11=0.25b −2r 2(mb 2+I )+I w ,m 12=0.25b −2r 2(mb 2−I ),m =m c +2m w ,I =m c d 2+2m w b 2+I c +2I m ,c =0.5b −1r 2m c d,m c 和m w 分别表示NWMR 主体和主动轮的质量,I c 表示NWMR 主体绕质心的转动惯量,I w 和I m 分别表示主动轮绕其中心轴和垂直轴的转动惯量,d jji >0(j =1,2)表示阻尼系数.为了便于后续研究,现对式(1)作适当处理.定义νi =Eωi ,其中:νi =[u i w i ]T ,u i 表示线速度,w i 表示角速度,E =r 2b [b b1−1].此时,式(1)可表示为{˙ηi =J (φi )νi ,M 0˙νi =F (νi )+¯τi +¯f i ,(3)其中:F (νi )=[F 1i F 2i ]T =C (˙φi )νi −D 0νi ,¯τi =[¯τ1i ¯τ2i ]T=E −T G (τi )2b,第7期周竞烨等:非完整轮式机器人的鲁棒同步编队跟踪及镇定控制1463¯f i =[¯f1i ¯f 2i ]T =E −T τd i 2b ,M 0=diag {m 01,m 02},m 01=m 11+m 12b,m 02=(m 11−m 12)b,以及J (φi )=cos φi 0sin φi 001,D 0= d 11+d 222b d 11−d 222d 11−d 222b (d 11+d 22)2.根据实际情况,令NWMR 满足以下假设.假设1外界干扰¯f i 有界,即存在正常数¯f i M ,使得|¯f ji | ¯f i M ,j =1,2.2.2编队模型本文采用领航–跟随编队控制策略[23–26],其结构如图2所示.图2领航–跟随编队结构示意图Fig.2Leader-follower formation structure图中,领航者的运动轨迹(x a ,y a ,φa )假设为已知的,第i 个跟随者的期望运动轨迹(x d i ,y d i ,φd i )由下式定义:x d i=x a +L i cos(δd i +φa ),y d i =y a +L i sin(δd i +φa ),φd i=φa+ζi,(4)式中:L i 和δd i 分别表示领航者与第i 个跟随者之间的期望相对距离和期望相对角度;ζi 表示第i 个跟随者的非完整约束补偿角,其定义为ζi =arctan(L i w a cos δd iu a −L i w a sin δd i),(5)其中u a 和w a 分别表示领航者的线速度和角速度,且满足以下方程:˙ηa =J (φa )νa ,(6)式中各物理量定义与式(3)中第1个方程类似.同理,式(4)也可等价地表示为以下微分方程:˙ηd i =J (φd i )νd i ,(7)式中:ηd i =[x d i y d i φd i ]T ,νd i =[u d i w d i ]T ,w d i =w a +˙ζ,u d i =√u 2a+L 2i w 2a −2u a L i w a sin δd i .对于期望轨迹,给出以下假设.假设2所有跟随者的期望速度νd i 及其导数˙νd i 都是有界的.2.3控制目标本文的控制目标:考虑由式(3)表示的多个NWMR 组成的编队系统,在领航者运动状态已知的条件下,针对每个跟随者,通过设计饱和控制输入¯τi ,使其运动轨迹(x i ,y i ,φi )能够跟踪上期望轨迹(x d i ,y d i ,φd i ),并保证跟踪误差(x i −x d i ,y i −y d i ,φi −φd i )收敛至零点附近的有界邻域内.不失一般性,期望轨迹(x d i ,y d i ,φd i )可以是满足假设2的任意轨迹,包括时变轨迹或固定点等.3控制器设计3.1运动学控制器设计为了解决由于NWMR 的非完整约束所引起的欠驱动问题,首先定义新的跟踪误差表达式为ηe i = cos ¯φi sin ¯φi 0−sin ¯φi cos ¯φi 0001 (ηi −ηd i )+∆β,(8)式中:¯φi =φi +arctan βφi ,∆β=[βx i 0arctan βφi ]T ,βx i 和βφi 为辅助控制量,其表达式后续确定.将式(8)对时间求导,可得跟踪误差方程为˙x e i =˙¯φi y e i +(u i −u d i )√1+β2φi +˙βx i +ϖx i φe i ,˙y e i =−˙¯φi (x e i −βx i )−(u i +u d i )βφi√1+β2φi +ϖy i φe i ,˙φe i =˙¯φi −w d i +˙βφi 1+β2φi,(9)式中:ϖx i =u d i (cos(arctan βφi )−cos(φe i −arctan βφi ))φe i,ϖy i =u d i (sin(arctan βφi )+sin(φe i −arctan βφi ))φe i,且使用sin(arctan βφi )=βφi√1+β2φi ,1464控制理论与应用第37卷cos(arctan βφi )=1√1+β2φi.根据假设2和三角函数关系不难得知,ϖx i 和ϖy i 有界且满足|ϖx i | √2|u d i |,|ϖy i | √2|u d i |.为了镇定跟踪误差x e i 和φe i ,将u i 和w i 视作虚拟控制输入,并定义为u v i =u d i +√1+β2φi (−˙βx i −k x i tanh x e i ),w v i =w d i −2˙βφi 1+β2φi−k φi tanh φe i ,(10)式中u v i 和w v i 分别表示u i 和w i 的虚拟控制输入量.将式(10)代入式(9),可得˙x e i =˙¯φi y e i −k x i tanh x e i +ϖx i φe i +u e i √1+β2φi ,˙y e i =−˙¯φi x e i +(w d i −˙βφi 1+β2φi −k φi tanh φe i +w e i )βx i −(u e i +2u d i )βφi√1+β2φi+k x i βφi tanh x e i +˙βx i βφi +ϖy i φe i ,˙φe i =−k φi tanh φe i +w e i ,(11)式中u e i =u i −u v i 和w e i =w i −w v i 表示虚拟控制误差.为了镇定跟踪误差y e i ,将辅助控制变量βx i 和βφi 视为虚拟控制输入.考虑到期望轨迹的复杂性,首先令βx i 和βφi 的表达式为{βx i =¯F(u d i )βx i,1,βφi =¯F (u d i )βφi,1+F (u d i )βφi,2,(12)式中:βx i,1,βφi,1和βφi,2为待确定的辅助控制分量;F (u d i )=(1+e −γ(u 2d i −u 20))−1,γ≫1,u 0为一个较小的正常数;¯F(u d i )=1−F (u d i ).不难得知,当|u d i | u 0时,F (u d i )≈1;当|u d i |<u 0时,F (u d i )≈0.对式(12)求导可得˙βx i=¯F (u d i )˙βx i,1−˙F (u d i )βx i,1,˙βφi =¯F (u d i )˙βφi,1+F (u d i )˙βφi,2−˙F (u d i )(βφi,1−βφi,2),(13)式中˙F (u d i )=−2γ(1+e −γ(u 2d i −u 20))−2e −γ(u 2d i −u 20)u d i ˙u d i .结合假设2易知,˙F(u d i )是有界的,当且仅当|u d i |≈u 0时,˙F(u d i )=0.因此,为了简化设计,令˙F (u d i )=0,此时,式(13)简化为˙βx i =¯F (u d i )˙βx i,1,(14a)˙βφi =¯F (u d i )˙βφi,1+F (u d i )˙βφi,2.(14b)为了确定式(12)中βx i,1,βφi,1和βφi,2的具体形式,首先对期望速度u d i 不同取值情况下的式(11)中˙y e i 表达式进行分析:1)当|u d i | u 0时,F (u d i )=1,βx i =0,βφi =βφi,2.此时,˙y e i 表达式可简化为˙y e i =−˙¯φi x e i −(u e i +2u d i )βφi,2√1+β2φi,2+k x i βφi,2tanh x e i +ϖy i φe i .(15)2)当|u d i |<u 0时,F (u d i )=0,βx i =βx i,1,βφi =βφi,1.此时,˙y e i 表达式可简化为˙y e i =−˙¯φi x e i −(u e i +2u d i )βφi,1√1+β2φi,1+(w d i −˙βφi,11+β2φi,1+w e i −k φi tanh φe i )βx i,1+k x i βφi,1tanh x e i +˙βx i,1βφi,1+ϖy i φe i .(16)根据上述分析,为了镇定跟踪误差y e i ,选择βx i,1,βφi,1和βφi,2为 [˙βx i,1˙βφi,1]=1Ωi [−k Ωi Ωie Πi −B i Πi −k Ωi B i Ωie ] βx i,1βφi,1 ,βφi,2=k y i u d itanh y e i,(17)式中:k y i 和k Ωi 为正常数,Ωi =β2x i,1+β2φi,1且Ωi (0)>0,Ωi e =Ωi −Ω0,Ω0为一个小的正常数,B i =1+β2φi,1,Πi =−k y i tanh y e i −k x i βφi,1tanh x e i −w d i βx i,1+2u d i βφi,1√1+β2φi,1.将式(17)分别代入式(15)–(16),可得˙y e i =−˙¯φi x e i −2k y i u 2d i tanh y e i √1+k 2y u 2d tanh 2y e i +k x i βφi,2tanh x e i −u e i βφi,2√1+β2φi,2+ϖy i φe i ,|u d i | u 0,˙y e i =−˙¯φi x e i −k y i tanh y e i +(−k φtanh φe i +w e i )βx i,1−u e i βφi,1√1+β2φi,1+ϖy i φe i ,|u d i |<u 0.(18)第7期周竞烨等:非完整轮式机器人的鲁棒同步编队跟踪及镇定控制1465 3.2动力学控制器设计为了镇定虚拟控制误差u e i和w e i,本节将对饱和控制输入¯τi进行设计.首先,结合式(3)和式(10)可得误差动力学分量形式为{m01˙u e i=F1i+¯τ1i+¯f1i−m01˙u v i,m02˙w e i=F2i+¯τ2i+¯f2i−m02˙w v i.(19)考虑到上式中F ji(j=1,2)包含未知建模信息,且˙u v i和˙w v i的形式较为复杂,为了简化控制设计,本文采用模糊系统对上式中的F ji−m0j˙νj v i进行近似.该模糊系统由以下模糊If–Then规则组成[27–28]:If z1isµi1and···and z n isµi n,then W is B i,i=1,2,···,N,其中:z j(j=1,2,···,n)∈R n和W∈R分别为模糊系统的输入和输出,µin是隶属函数,B i是输出的模糊集.此时,模糊系统的输出可表示为W=N∑i=1θi(n∏j=1µij(z j))N∑i=1(n∏j=1µij(z j))=ξTθ,式中:ξ=[ξξ2···ξN]T,ξi=n∏j=1µij(z j)(N∑i=1n∏j=1µij(z j)),θ=[θ1θ2···θN]T.对于任意有界连续函数Y(z),根据模糊系统特性,存在最优逼近常量θ∗满足Y(z)=ξT(z)θ∗+ε,其中|ε| ¯ε,¯ε可以是任意小的正常数.结合上述特性,式(19)可表示为{m01˙u e i=ξT(z u i)θ∗v i+εu i+¯τ1i+¯f1i,m02˙w e i=ξT(z w i)θ∗w i +εw i+¯τ2i+¯f2i,(20)其中:z u i=[u i w i˙u v i]T,z w i=[u i w i˙w v i]T表示模糊系统的输入信号,εu i和εw i表示模糊估计误差.根据式(20),设计控制输入为{¯τ1i=−k u i tanh u e i−ξT(z u i)ˆθu i,¯τ2i=−k w i tanh w e i−ξT(z w i)ˆθw i,(21)式中ˆθji(j=u,w)表示θ∗ji的估计值且满足˙ˆθu i=γu iξ(z u i)tanh u e i−γu iδu iˆθu i,˙ˆθw i=γw iξ(z w i)tanh w e i−γw iδw iˆθw i,(22)其中γji和δji(j=u,w)均为正常数.此外,考虑到|ξi| 1,则结合式(22)不难得到,式(21)满足以下不等式:{|¯τ1i| k u i+Nδ−1u i,|¯τ2i| k w i+Nδ−1w i.(23)因此,根据¯τi的定义,若选择参数k ji和δji(j=u,w)应满足以下关系:k u i+Nδ−1u ir2b(τ1M+τ2M),k w i+Nδ−1w ir2(τ1M+τ2M),(24)则所设计的控制输入式(21)将不会违反饱和限制条件式(2).此时,将式(21)代入式(20),并定义参数估计误差˜θji=θ∗ji−ˆθji,j=u,w,结合式(22),整理后可得误差动力学方程为˙u e i=−k u i tanh u e i+ξT(z u i)˜θu i−εu i+¯f1im01,˙w e i=−k w i tanh w e i+ξT(z w i)˜θw i−εw i+¯f2im02,˙˜θu i=−γu i tanh u e iξ(z u i)+γu iδu iˆθu i,˙˜θw i=−γw i tanh w e iξ(z w i)+γw iδw iˆθw i.(25) 4稳定性分析定理1考虑由式(11)(18)(25)组成的误差系统.当假设1和假设2成立时,通过选取合适的控制参数k x i,k y i,kφi,γu i和γw i,并保证不等式(24)成立,则所有误差信号x e i,y e i,φe i,u e i,w e i,˜θu i和˜θw i均全局收敛至零点附近的有界小邻域内.证为了简化证明,根据跟随者的期望轨迹的差异,对上述误差系统分为以下两种情况进行考虑.1)|u d i| u0:此时,式(18)中第1个表达式成立选择以下备选Lyapunov函数:V=12x2e i+12y2e i+λ1i ln coshφe i+λ2i(m01ln cosh u e i+12γu i˜θTu i˜θu i)+λ3i(m02ln cosh w e i+12γw i˜θTw i˜θw i),(26)其中λji(j=1,2,3)为合适的正常数.对式(26)求导,结合式(11)(25)(18)中第1个表达式,可得˙V=−kx ix e i tanh x e i+u e i x e i√1+β2φi,2+x e iϖx iφe i−2k y i u2d iy e i tanh y e i√1+k2yu2dtanh2y e i+k x iβφi,2y e i tanh x e i−u e iβφi,2y e i√1+β2φi,2+y e iϖy iφe i+λ1i(−kφi tanh2φe i+tanhφe i w e i)+λ2i(−k u i tanh2u e i−1466控制理论与应用第37卷εu i tanh u e i+¯f1i tanh u e i+δu i˜θTu i ˆθu i)+λ3i(−k w i tanh2w e i−εw i tanh w e i+¯f 2i tanh w e i+δw i˜θTw iˆθw i).(27)利用Young不等式ab λa2+b24λ,∀a,b∈R,λ∈R+,式(27)可简化为˙V −k′x i x e i tanh x e i−k′y iu2d iy e i tanh y e i√1+k2yu2dtanh2y e i−λ1i k′φitanh2φe i−λ2i k′u i tanh2u e i−λ3i k′w i tanh2w e i+λ2i4(ε2u iλuεi+¯f21iλuf i)+λ3i 4(ε2w iλwεi+¯f22iλwf i)−λ2iδ′u i∥˜θu i∥2F−λ3iδ′w i ∥˜θw i∥2F+λ2iδ2u i4λθu i∥θ∗u i∥2F+λ3iδ2w i4λθw i∥θ∗w i∥2F,(28)式中:k′x i=k x i(1−λxy i−λxφi−λxu i),k′y i=k y i(2−k x iβφi,2√1+β2φi,2y e i tanh x e i4λxy i|u d i|x e i−λyφi−λyu i),k′φi=kφi−k x i x e i u2d iφ2e i4λ1iλxφi tanh x e i tanh2φe i−√1+β2φi,2|u d i|φ2e i y e i4λ1iλyφi k y iβφi,2tanh y e i tanh2φe i−λφw i,k′u i=k u i−x e i u2e i4λ2iλxu i k x i tanh x e i tanh2u e i−βφi,2y e i u2e i4λ2iλyu i|u d i|√1+β2φi,2tanh2u e i−λuφi−λuf i,k′w i=k w i−λ1i w2e i4λ3iλφw i tanh2w e i−λwεi−λwf i,δ′u i=δu i−λθu i,δ′w i=δw i−λθw i,(29)其中λxy i,λxu i,λxφi,λyφi,λyu i,λφw i,λuεi,λwεi,λuf i,λwf i,λθu i,λθw i为合适的正常数以使得δ′ji>0(j=u,w)和k′ji>0(j=x,y,φ,u,w).考虑到−x e i tanh x e i −tanh2x e i,|εji| ¯εji,j =u,w,¯εji可以为任意小正常数,并结合假设1式(28)可简化表示为˙V −K1∥X∥2+C1,(30)式中:X=[tanh x e i tanh y e i tanhφe i tanh u e itanh w e i∥˜θu i∥F∥˜θw i∥F]T,K1=min(k′x i,2k′y i√1+k2y iu2d i,λ1k′φi,λ2k′u i,λ3k′w i,λ2δ′u i,λ3δ′w i),C1=λ2i4(¯ε2u iλuφi+¯f2i Mλuf i+δ2u iλθu iθ∗2u i)+λ3i4(¯ε2w iλwεi+¯f2i Mλwf i+δ2w iλθw iθ∗2w i).(31)不难发现,当∥X∥>√C1K1时,˙V<0,即V是全局严格渐近收敛的,因此,根据V和X的定义,可知所有误差信号x e i,y e i,φe i,u e i,w e i,˜θu i和˜θw i均全局收敛至零点附近的有界小邻域内,该邻域半径满足∥X∥√C1K1.2)|u d i|<u0:此时,式(18)中第2个表达式成立.选择备选Lyapunov函数式(26)并对其求导,可得˙V=−kx ix e i tanh x e i+u e i x e i√1+β2φi,1+x e iϖx iφe i−k y i y e i tanh y e i+y e iϖy iφe i−y e i u e iβφi,1√1+β2φi,1+λ1i(−kφi tanh2φe i+tanhφe i w e i)+λ2i(−k u i tanh2u e i−εu i tanh u e i+¯f1i tanh u e i+δu i˜θTuˆθu)+λ3i(−k w i tanh2w e i−εw i tanh w e i+¯f2itanh w e i+δw i˜θTwˆθw).(32)通过与情况1中分析类似过程,可得˙V −K2∥X∥2+C2,(33)式中:K2和C2为合适的正常数.因此,所有误差信号x e i,y e i,φe i,u e i,w e i,˜θu i和˜θw i均全局收敛至零点附近半径满足∥X∥√C2K2的有界小邻域内.综上,可以得出结论:所有误差信号x e i,y e i,φe i, u e i,w e i,˜θu i和˜θw i均全局收敛至零点附近的有界小邻域内.证毕.根据上述结果,下面给出本文的主要结论.定理2考虑多个NWMR组成的编队系统(1)或系统(3)并认为假设1–2成立.当领航者运动状态已知时,针对每个跟随者,在饱和控制输入(21)作用下,通过选取合适的控制参数k x i,k y i,kφi,γu i和γw i,并保证不等式(24)成立,则其跟踪误差ηi−ηd i能够全局收敛至原点附近的有界小邻域内.证根据定理1结论和式(8)可知,为证明跟踪误差ηi−ηd i全局收敛,仅需证明βx i和βφi的有界性即第7期周竞烨等:非完整轮式机器人的鲁棒同步编队跟踪及镇定控制1467可.为此,通过对式(12)分析可知|βx i | |βx i,1|,|βφi | |βφi,1|+|βφi,2|.(34)对于βφi,2,由式(17)中第2个方程可知|βφi,2| k y i |u d i |.(35)对于βx i,1和βφi,1,根据式(17)中第1个方程,取备选Ly-apunov 函数V βi=β2x i,1+ln(1+β2φi,1)2并求导可得˙V βi =−k Ω(Ωi −Ω0),(36)则当Ωi >Ω0时,˙Vβi <0,即βx i,1和βφi,1是全局收敛的.因此,结合Ωi 定义,可知|βji,1(t )| max(|βji,1(0)|,√Ω0),j =x,φ.(37)结合式(34)–(35)(37)可知,βx i 和βφi 是有界的,再由定理1,可得出结论:跟踪误差ηi −ηd i 能够全局收敛至原点附近的有界小邻域内.证毕.5仿真试验为了验证文中所设计的控制方法的性能,本节对由多个NWMR 组成的编队控制问题进行了仿真试验.NWMR 的模型参数为[14]b =0.5m ,d =0.3m ,r =0.15m ,mc =30kg ,m w =1kg ,I c =5.6kg ·m 2/s ,I w =0.005kg ·m 2/s ,I m =0.0025kg ·m 2/s ,d 11=d 22=1kg/s ,干扰项:τd1i =0.05sin(0.1t ),τd2i =0.05sin(0.1t ).首先,对NWMR 编队跟踪控制问题进行了仿真研究.该编队由领航者和2个跟随者组成,领航者与跟随者之间的期望距离和相对角度分别为L 1=L 2=5√2m ,δd1=3π4,δd2=5π4.仿真前50s,领航者的线速度和角速度为u a =0.5m/s ,w a =0rad/s ,之后设定为u a =0.5m/s ,w a =0.03rad/s .控制参数设定为k u i =30,k w i =20,k x i =5,k y i =1.5,k φi =1,k Ωi =0.1,γi =50,u 0=0.2,Ω0=0.01,T φi =1,βx1i (0)=2,βφ1i (0)=0.5,γu i =20,γw i =20,δu i =2,δw i =2,τM =20.模糊系统中输入变量z u i 和z w i 的模糊集个数为3个,总的模糊规格为27个.选择高斯函数隶属函数µi n ,其中高斯函数的中心为(−3,0,3),宽度为3.仿真结果如图3所示.由图3可以看出,在本文控制器作用下,跟随者的跟踪误差均收敛至零点附近的有界小区域内,且控制输入均未超出其饱和限制值.此外,作为对比,上图中还给出了采用文献[14]中控制方法的仿真结果.不难发现,与本文方法相比,文献[14]中方法可以得到类似的稳态跟踪精度,但其在仿真初期会引起跟踪误差较为剧烈的振荡,并引发对控制输入远超其饱和限制值的需求.(a)编队跟踪轨迹(b)跟踪误差(c)文献[14]的控制输入(d)本文的控制输入1468控制理论与应用第37卷(e)辅助控制量图3编队跟踪仿真对比Fig.3Formationtrackingsimulationcomparisons为了验证本文控制方法在编队镇定问题上的有效性,本节针对由1个领航者和4个跟随者构成的编队镇定控制问题进行了仿真.其中,领航者的轨迹设定为ηa=[000]T,其与第i个跟随者之间的期望距离和相对角度设为L i=20√2m ,δdi =(2i−1)π/4.控制参数设定与上述跟踪控制问题中相同.结果如图4所示.(a)编队镇定轨迹(b)镇定误差(c)文献[15]控制输入(d)本文控制输入(e)辅助控制量图4编队镇定仿真对比Fig.4Formation stabilization simulation comparisons作为对比,图4中也给出了采用文献[15]中控制方法的结果.不难看出,与文献[15]中控制方法相比,本文控制方法在输入饱和限制条件下具有较小的稳态跟踪误差.不仅如此,如图4(b)所示,本文控制方法能够确保角度跟踪误差收敛至零点附近的小邻域内,而文献[15]中控制方法无法做到.此外,为了进一步验证本文控制器的抗饱和性和第7期周竞烨等:非完整轮式机器人的鲁棒同步编队跟踪及镇定控制1469鲁棒性,本节对较大初始位置误差和存在状态突变情况下的NWMR 编队跟踪控制问题进行了仿真研究.编队结构与前述跟踪情况相同.仿真前100s 内,领航者的线速度和角速度分别为u a =2m/s ,w a =0rad/s ,之后为u a =2m/s 和w a =0.05rad/s ,且在t =100s 时,其中领航者的期望状态从(200,0,0)突变为(170,30,0).另外,跟随者的初始状态分别设定为η1(0)=[5070π3]T ,η2(0)=[−50−70π3]T ,控制参数设定与前述相同.仿真结果如图5所示.由图5可以看出,在存在较大初始误差和状态突变情况下,本文控制方法依然保持了良好的控制性能,且控制输入始终保持在饱和限制范围内,具有优良的抗饱和性和鲁棒性.(a)大初始误差下的编队跟踪轨迹(b)跟踪误差(c)控制输入(d)辅助控制量图5大初始误差和存在位置突变的编队跟踪仿真Fig.5Formation tracking simulation with large initial errorsand ideal position change6结论本文针对带有参数不确定性和控制输入饱和限制的NWMR 编队的同步跟踪和镇定控制问题进行了仿真研究.利用领航者跟随者编队策略,通过设置领航者和跟随者的相对距离和夹角,给出跟随者的期望轨迹,对于单个跟随者,通过在跟踪误差模型中引入辅助控制量,设计出具有统一结构形式的运动学控制器以实现对不同类型期望轨迹的跟踪,包括时变轨迹和固定点等.针对NWMR 的模型不确定性和输入饱和限制,采用模糊控制方法,并结合反步法,设计出一种饱和动力学控制器,可以使得跟踪误差全局收敛至零点附近的小邻域内,且控制输入不会超出饱和限制值.仿真试验证明,本文方法可以实现NWMR 编队的同步跟踪和镇定控制,并对大初始误差和状态突变等情况具有良好的鲁棒性.尽管如此,本文控制方法的相关性能还有待通过实际的NWMR 编队实验做进一步的验证,这也是作者后续工作的重点开展方向.参考文献:[1]SUN Z J,ZHANG G Q,LU Y ,et al.Leader-follower formation con-trol of underactuated surface vehicles based on sliding mode control and parameter estimation.ISA Transactions ,2018,72(1):15–24.[2]LIANG X W,WANG H S,CHEN W D,et al.Formation control ofnonholonomic mobile robots without position and velocity measure-ments.IEEE Transactions on Robotics ,2018,34(2):434–446.[3]CHEN C Y ,DONG W J.Distributed tracking control of uncertainmechanical systems with velocity contrains.International Journal of Robust and Nonlinear Control ,2017,27(17):3990–4012.[4]CONSOLINI L,MORBIDI F,PARTTICHIZZO D,et al.Leader-follower formation control of nonholonomic mobile robots with input constraints.Automatica ,2008,44(5):1343–1349.[5]SUN Z Q,XIA Y Q.Receding horizon tracking control of unicycle-type robots based on virtual structure.International Journal of Robust and Nonlinear Control ,2016,26(17):3900–3918.[6]SADOWSKA A,DEN BROEK T V ,HUIJBERTS H,et al.A virtualstructure approach to formation control of unicycle mobile robots us-ing mutual coupling.International Journal of Control ,2011,84(11):1886–1902.[7]LEE G,CHWA D.Decentralized behavior-based formation controlof multiple robots considering obstacle avoidance.Intelligent Service Robotics ,2018,11(1):127–138.1470控制理论与应用第37卷[8]YANG Fan,LIU Shirong,DONG Deguo.Robot behavior andservice-based motion behavior structure design in formation control.Robot,2012,34(1):120–128.(杨帆,刘士荣,董德国.编队控制中的机器人行为与基于服务的运动行为结构设计.机器人,2012,34(1):120–128.)[9]PENG Z X,WEN G G,YANG S C,et al.Distributed consensus-based formation control for nonholonomic wheeled mobile robots us-ing adaptive neural network.Nonlinear Dynamics,2016,86(1):605–622.[10]LORIA A,DASDEMIR J,JARQUIN N A.Leader follower forma-tion and tracking control of mobile robots along straight paths.IEEE Transactions on Control Systems Technology,2016,24(2):727–732.[11]PENG Tao,LIU Chengjun.Formation control of wheeled mobilerobots with unknown information via deterministic learning.Control Theory&Applications,2018,35(2):239–247.(彭涛,刘成军.含未知信息的轮式移动机器人编队确定学习控制.控制理论与应用,2018,35(2):239–247.)[12]ZHANG Ruilei,LI Sheng,CHEN Qingwei.Dynamic formation con-trol for car-like mobile robots.Robot,2013,35(6):651–656.(张瑞雷,李胜,陈庆伟.车式移动机器人动态编队控制方法.机器人, 2013,35(6):651–656.)[13]ZHANG Ruilei,LI Sheng,CHEN Qingwei.Formation control for akind of nonholonomic mobile robots.Control and Decision,2013, 28(11):1751–1755.(张瑞雷,李胜,陈庆伟.一类非完整移动机器人编队控制方法.控制与决策,2013,28(11):1751–1755.)[14]MAGHENEM M,LORIA A,PANTELEY E.Lyapunov-basedformation-tracking control of nonholonomic systems under persisten-cy of excitation.IFAC–Papers Online,2016,49(18):404–409.[15]XIE W J,MA B L,FERNANDO T,et al.A new formation controlof multiple underactuated surface vessels.International Journal of Control,2017,91(5):1011–1022.[16]MAGHENEM M,LORIA A,PANTELEY E.A robustδ-persistentlyexciting controller for leader-follower tracking-agreement of multiple vehicles.European Journal of Control,2018,40(2):1–12.[17]HUANG J S,WEN C Y,WANG W,et al.Adaptive stabilization andtracking control of a nonholonomic mobile robot with input satura-tion and disturbance.Systems&Control Letters,2013,62(3):234–241.[18]LI J W.Robust tracking control and stabilization of underactuatedn Journal of Control,2018,20(6):2143–2153.[19]HUANG H T,ZHOU J Y,DI Q,et al.Robust neural network-basedtracking control and stabilization of a wheeled mobile robot with in-put saturation.International Journal of Robust and Nonlinear Con-trol,2019,29(2):375–392.[20]WANG Z P,LI G B,CHEN X Z,et al.Simultaneous stabilization andtracking of nonholonomic WMRs with input constraints:Controller design and experimental validation.IEEE Transactions on Industrial Electronics,2019,66(7):5343–5352.[21]ASHRAFIUON H,NERSESOV S,CLAYTON G.Trajectory track-ing control of planar underactuated vehicles.IEEE Transactions on Automatic Control,2017,62(4):1959–1965.[22]KIM S,KWON S.Nonlinear optimal control design for underactu-ated two wheeled inverted pendulum mobile platform.IEEE/ASME Transactions on Mechatronics,2017,22(6):2803–2808.[23]LIN Anhui,JIANG Desong,ZENG Jianping.Ship formation controlvia output feedback with unknown dynamics.Control Theory&Ap-plications,2017,34(9):1222–1229.(林安辉,蒋德松,曾建平.具有未知动态的船舶编队输出反馈控制.控制理论与应用,2017,34(9):1222–1229.)[24]DASDEMIR J,LORIA A.Robust formation tracking control of mo-bile robots via one-to-one time-varying communication.Internation-al Journal of Control,2014,87(9):1822–1832.[25]MAGHENEM M,LORIA A,PANTELEY E.Formation-trackingcontrol of autonomous vehicles under relaxed persistency of excita-tion conditions.IEEE Transactions on Control Systems Technology, 2018,26(5):1860–1865.[26]FU Mingyu,YU Lingling,JIAO Jianfang,et al.Formation control ofautonomous surface vessels with saturation constraint.Control Theo-ry&Applications,2017,34(5):663–670.(付明玉,余玲玲,焦建芳,等.控制饱和约束下的自主水面船编队.控制理论与应用,2017,34(5):663–670.)[27]WANG Lixin,WANG Yingjun.A Course in Fuzzy Systems&Con-trol.Beijing:Tsinghua University Press,2003.(王立新,王迎军.模糊系统与模糊控制.北京:清华大学出版社, 2003.)[28]YANG C G,JIANG Y M,NA J,et al.Finite-time convergence adap-tive fuzzy control for dual-arm robot with unknown kinematics and dynamics.IEEE Transactions on Fuzzy Systems,2019,27(3):574–588.作者简介:周竞烨硕士研究生,目前研究方向为多移动机器人编队控制、非线性控制,E-mail:****************;李家旺博士,副教授,硕士生导师,目前研究方向为非完整系统控制、非线性控制、鲁棒控制、自适应控制等,E-mail:lijiawang@nbu.;邸青硕士研究生,目前研究方向为移动机器人运动控制、非线性控制,E-mail:*****************;方凯硕士研究生,目前研究方向为移动机器人运动控制、非线性控制,E-mail:****************;姚佳琪硕士研究生,目前研究方向为移动机器人运动控制、非线性控制,E-mail:****************;黄汉涛硕士研究生,目前研究方向为多移动机器人编队控制、非线性控制,E-mail:****************.。
基于Lyapunov法的非完整移动操作机运动规划
闫庆辉;付宜利;马玉林
【期刊名称】《机械设计》
【年(卷),期】2007(24)11
【摘要】研究了受非完整约束的轮式移动操作机运动规划问题。
根据拉格朗日动力学原理建立满足非完整约束条件的动力学方程,并证明该方程的结构特性。
基于Lyapunov理论设计了运动控制器,实现系统从初始位置到目标位置的运动规划。
仿真结果表明该控制器的有效性。
【总页数】3页(P21-22)
【关键词】移动操作机;非完整约束;运动规划;Lyapunov法
【作者】闫庆辉;付宜利;马玉林
【作者单位】哈尔滨工业大学现代生产技术中心
【正文语种】中文
【中图分类】TP24
【相关文献】
1.基于Gauss伪谱法的移动机器人非完整运动规划 [J], 董雪仰;戈新生;陈凯捷
2.基于Lyapunov方法的双臂空间机器人避障碍分级非完整运动规划 [J], 郭益深;陈力
3.滑移铰空间机器人基于分级Lyapunov方法的避障碍非完整运动规划 [J], 郭益深;陈力
4.粒子群法在非完整移动操作机运动规划中的应用 [J], 付宜利;闫庆辉;马玉林
5.基于非完整运动规划的多指手灵巧操作 [J], 管贻生;何永强;张启先
因版权原因,仅展示原文概要,查看原文内容请购买。
一种改进的非完整轮式移动机器人轨迹跟踪控制方法俞亚杰;罗印升;宋伟【期刊名称】《机床与液压》【年(卷),期】2017(45)11【摘要】To make up disadvantage of error convergence speed and smoothness on the non-complete constraint trajectory tracking of mobile robot control.A improved nonlinear backstepping tracking control method was designed.On the basis of the kinematic model,a simple dummy variables was constructed and then back-stepping control law was deduced,and the stability of the control law was proved by Lyapunov function,also a feedback control was inserted,and then a new trajectory tracking controller was got.MATLAB simulation results show that the improved nonlinear backstepping control law well have been improved,the tracking error can converge in a short period of time,has a good anti-jamming capability.%针对非完整约束下移动机器人的轨迹跟踪控制中误差收敛速度和平滑性上存在的不足,提出了一种改进的非线性反推跟踪控制算法.在运动学模型的基础上,构造了简单的虚拟变量推导出了反推控制律,且通过Lyapunov函数证明了该控制律的稳定性,并引入了一个反馈控制律,得到了一种新型轨迹跟踪控制器.MATLAB仿真分析表明:改进的非线性反推控制律很好地改善了控制效果,跟踪误差能在较短的时间内收敛,具有良好的抗干扰能力.【总页数】4页(P44-47)【作者】俞亚杰;罗印升;宋伟【作者单位】江苏理工学院机械工程学院,江苏常州 213001;江苏理工学院电气信息工程学院,江苏常州 213001;江苏理工学院电气信息工程学院,江苏常州 213001【正文语种】中文【中图分类】TP24【相关文献】1.非完整轮式移动机器人轨迹跟踪控制 [J], 王仲民;马苏常;岳宏2.非完整轮式移动机器人反演滑模轨迹跟踪控制器设计 [J], 杨敏;梅劲松;廖里程3.非完整四轮式移动机器人反演轨迹跟踪控制 [J], 席雷平;段莲飞;江涛4.非完整轮式移动机器人轨迹跟踪控制研究 [J], 徐俊艳;张培仁5.一种轮式移动机器人的轨迹跟踪控制方法研究 [J], 常江;张连军;薛迪因版权原因,仅展示原文概要,查看原文内容请购买。