车辆自组织网络
- 格式:ppt
- 大小:701.50 KB
- 文档页数:11
自组织网络发展及现状自组织网络是自组织理论在通信网络中的具体运用。
自组织网络的起源可追溯到1968年的ALOHA网络和1973年美国国防部高级研究计划署(DARPA)资助研究的“无线分组数据网(PRNET)”。
这些最初的自组织网络对自组织技术的发展起了奠基性的作用。
20世纪80年代,美国国防部启动了可生存自适应网络(SURAN)项目,研究如何将PRNET的研究成果加以扩展,以支持更大规模的网络。
1994年,美国国防部又启动了全球信息系统(GloMo)计划,研究范围几乎覆盖无线通信所有相关领域。
在该计划中,对于满足军事需要的、高抗毁灭性的自组织网络技术进行了深人的研究。
20世纪90年代以来,民用的系统也逐渐出现了无线自组织网的标准和应用。
IEEE 委员会在开发IEEE 标准时,将分组无线电网络改称为Ad Hoc(拉丁语:“专有的、特定的”之意)网络,进一步推动了自组网的发展。
1994年瑞典Ericsson公司推出蓝牙技术开发计划,1999年公布了采用自组织网的蓝牙技术标准。
Internet工程部(IETF)也成立了一个移动自组织网络工作组(MANET),其主要目标就是针对无线自组织多跳网开发一种基于IP协议的路由机制,使得IP协议扩展到这种自组织的、快速移动的无线网。
这个工作组对自组网进行了广泛的研究并推出了一些草案。
近些年来,随着移动通信和计算机技术的发展以及用户需求的不断增长,对自组织通信网的研究得到了更为快速的发展。
目前从事自组织网络研究的机构主要有Internet工程部(IETF)、IEEE组织及美国的国防高级研究计划局(DARPA)。
IETF 于1997年成立了专门的研究组——MANET组,针对MANET开发基于IP协议的路由机制并解决与网络层相关的技术问题。
在2000年下半年公布了一系列MANET路由协议草案,如DSDV、AODV、TORA、DSR、OLSR等。
IEEE通信分会在2000年成立了专门的MANET技术分委员会。
城市道路交通场景下车辆自组织网络建模与仿真魏赟;杨晓光;何晓帆【摘要】Traffic congestion in cities has become a difficult problem for modern urban management.VANET (Vehicular ad hoc network) is one important application of Internet of Things in intelligent transportation,and is increasingly popuplar in academic research.Due to the difficulty to obtain communication data of VANET through traditional experiments and the high cost of on -site test,current researches on VANET are mostly based on simulation.Traffic simulation is the one of the effective methods for VANET research.This study analyzed the VANET hierarchical protocol model from the perspective of microscopic simulation of traffic system,and set up a vehicle movement model of VANET based on OPNET Modeler software,Based on the V2V simulation in the middle and small cities in Western China,the paper also studied the modeling and simulation of VANET under the urban road traffic scenes.Results show that when vehicles are running at low speed,Ad Hoc on Demand Distance Vector (AODV) protocol has better performance in average network time delay,throughput,routing load than the Dynamic Source Routing (DSR)protocol.The research results are of both theoretical and practical value to promote the application of VANET in intelligent transportation based on Internet of Things.%“城市交通拥堵”问题已成为现代城市管理所面临的难题,车辆自组织网络是物联网在智能交通领域的应用形态,近年来逐步成为学术界研究的热点.因为车辆自组织网络的通信数据通过普通实验方法较难获取,实地测试代价昂贵,目前的车辆自组织网络研究大部分都基于仿真,交通仿真是可以采取的有效方法之一.从交通系统微观仿真角度,分析了车辆自组织网络的分层协议模型;基于OPNET软件构建了车辆移动模型;以西部中小城市道路交通场景下V2V仿真为例,进行城市道路交通场景下车辆自组织网络建模与仿真研究.仿真实验表明车辆在低速运行时,AODV协议在网络平均时延、吞吐量、路由负载等性能上都优于DSR协议,更适合网络的通信需求.研究成果对于促进车辆自组织网络在基于物联网的智能交通领域的应用具有理论意义和实践价值.【期刊名称】《兰州交通大学学报》【年(卷),期】2018(037)001【总页数】7页(P14-20)【关键词】物联网;智能交通系统;车辆-基础设施;车辆-车辆;OPNET【作者】魏赟;杨晓光;何晓帆【作者单位】兰州交通大学铁道技术学院,甘肃兰州 730000;同济大学交通运输工程学院,上海201804;同济大学智能交通运输系统研究中心,上海201804;同济大学交通运输工程学院,上海201804;同济大学智能交通运输系统研究中心,上海201804;同济大学建筑与城市规划学院,上海200092【正文语种】中文【中图分类】U491随着机动车数量的迅速增加,“城市交通拥堵”现象严重影响了城市环境.智能交通系统(Intelligent Transportation System,ITS)正逐步成为世界各国解决交通拥堵问题的研究方向.车辆自组织网络(Vehicular Ad Hoc Network,VANET)是物联网在智能交通领域所新兴的一种重要应用形态.根据交通的实际运行环境,车辆自组织网络的通信功能主要划分为车辆-基础设施(Vehicle-to-Infrastructure,V2I)之间的通信和车辆-车辆(Vehicle-to-Vehicle,V2V)之间的通信.智能交通系统在国外发展迅速并且形成欧、美和日3大模式[1].90年代以来,国内学者在智能交通技术领域的研究取得显著成绩.车辆自组织网络是基于物联网的智能交通系统基础信息承载平台,起源于军事应用,随着经济和社会发展的需求,不断应用于我们的生活.以美国、欧洲和日本为代表的发达国家,已经定义了用于车辆自组织网络的通信标准和一系列应用场景,其相关的核心技术处于实验室的研究阶段[2].1 国内外研究综述目前,人们对车辆自组织网络安全、车况、娱乐等服务信息传输的可靠性要求越来越高.如何提高实时交通信息的质量,影响车辆-基础设施之间MAC(Medium Access Control,介质访问控制)层的协议与接入技术、影响车辆-车辆之间高质量通信的路由协议、影响车辆智能化应用管理与安全等都是学者关注的问题,研究热点主要集中在以下几个方面:1) 车辆自组织网络MAC层的研究.实现车辆-基础设施之间的通信首先要解决MAC层的协议问题,如何实现快速的MAC层切换是需要关注的问题;当车辆需要访问互联网时,如何配置 IP 地址;当车辆在多个路边设施间切换时如何保证持续的网络连接问题.Zhang等[3]扩展了仿真通信软件的物理层和MAC层;莱斯(Rice)大学的Monarch研究项目扩展了NS2软件的无线网络模块,使NS2软件包括了开放系统互联模型OSI(Open System Interconnection)协议栈中的主要层次(Layer);AHMEDZAID等[4]扩展了IEEE 802.11p协议的PHY(Physical Layer,物理层)/MAC层的实现.2) 车辆自组织网络的路由关键技术研究.车辆自组织网络中存在很多端到端的多跳数据传输应用场景,在这种网络资源有限的应用场景下,需要选择更合适的路由协议提高此环境下的网络性能.宋超[5]对无线Ad Hoc网络路由算法进行研究;2013年揭志忠[6]对髙速公路环境下的路由问题进行研究;2015年朱东杰[7]对车载自组网路由协议及路径决策模型进行研究.3) 车辆自组织网络的安全应用研究.在研究车辆自组织网络应用如何实现的同时,网络安全问题也是不可忽视的研究热点.Wang等[8]对网络安全和隐私保护问题进行研究;李桂森[9]对车载自组织网络数据分发技术进行研究;朱晓玲[10]对VANET安全和隐私保护机制进行研究.目前的车辆自组织网络研究大部分都基于仿真,车辆自组织网络的通信数据从普通的实验方法很难获取[11].首先,现场试验一般需要大量的车辆和测试人员,实地测试过程代价昂贵.因为不仅需要购买或租用很多通信设备和车辆,如果在高速情况下进行实地测试,实验人员可能面临各种危险.此时仿真是可以采取的有效方法之一.其次,研究人员准确地重复和实施一次现场试验是很困难的.但是采用交通仿真的研究方法,一旦仿真模型建立,仿真过程可以任意重复;仿真模型不依赖原始数据,用户通过不断的输入修正,逐步取得理想的数值.因此,交通仿真是研究车-X(车辆-车辆,车辆-基础设施)之间的高质量通信的有效方法.同济大学道路与交通工程教育部重点实验室孙剑等[12]提出车路协同系统一体化仿真实验平台建设思想,通过高层体系架构(High Level of Architecture,HLA)仿真建模思想,整合VISSIM软件与NS2软件,实现仿真时间管理、跨平台数据交互以及联邦成员互操作等功能.Apratim等[13]关于交通仿真一体化的做法是:首先,使用VISSIM软件建立交通模型;其次,使用MATLAB软件设计交通管理应用场景;最后,用NS3软件进行场景的通信网络仿真.研究需要关注以下问题:1) 关注解决各个软件之间的接口问题,实现软件之间的协同;2) 由于NS3只能与固定数量的节点配置,所以关注节点的动态增减问题;3) 关注NS3移动模型的选择问题.陈永等[14]建立兰州快速公交系统元胞自动机仿真模型,对兰州快速公交系统进行仿真与分析.王江卫等[15]提出了一种结合智能体理论和元胞自动机理论的改进混合交通流建模仿真方法,有效地模拟交通流现象,提高交通仿真效率.刘应东等[16]提出了考虑车辆减速度的元胞自动机模型,通过模拟仿真,得到的车速、流量和密度数据及其相互关系.通过对国内外研究综述,发现基于物联网的智能交通系统中车辆自组织网络研究中仍有需要完善的地方,主要表现在:1) 研究关注角度不同.研究多从工学角度考虑问题,集中在车辆自组织网络技术本身,很少从物联网技术、智能交通系统、管理学和系统论的角度去研究.2) 西部中、小城市应用案例几乎是空白.国内基于物联网的智能交通系统中车辆自组织网络研究较少,针对西部中、小城市的实际安全应用案例更少,很多案例都集中在北京、上海等交通、经济发展迅速的大城市.3) 交通仿真软件的选择问题.目前交通仿真软件主流是VISSIM软件、NS3软件和Matlab等软件,在解决交通仿真一体化的过程中,出现新的问题需要解决.根据研究对象的具体情况,研究内容的侧重,可以尝试使用不同的仿真软件.2 车辆自组织网络的分层协议模型车辆自组织网络是由汽车上装载的无线通信设备、路边建设的采集单元、传输网络、后台处理服务器及相关采集处理软件组成的网络系统,也称车载网[17].车辆自组织网络覆盖一个国家,甚至是整个大陆地区,包括几亿个节点.车辆自组织网络能够很好地感知车辆的速度、位置,采集交通路面状况和车流量等信息.车辆自组织网络的分层协议模型中,物理层通常划分为物理层汇聚协议子层PLCP(physical layer convergence procedure)和物理介质相关子层PMD(physical medium dependent).另外,车辆自组织网络通常会遇到多个物理设备共享介质的情况,数据链路层被划分为介质访问控制子层MAC和逻辑链路控制子层LLC(logical link control).会话层、表示层和应用层合并为一层.如图1所示,显示了车辆自组织网络的分层协议模型.图1 车辆自组织网络的分层协议模型Fig.1 The VANET Hierarchical Protocol model车辆自组织网络的分层协议模型为5层,从高到低依次为应用层、传输层、网络层、数据链路层和物理层.物理层和数据链路层有专门为车辆自组织网络制订的802.11p等协议,传输层和应用层有成熟的协议,在网络层可以通过对路由协议的改进,提高车辆自组织网络总体性能.3 基于OPNET的车辆移动模型构建OPNET软件采用离散事件驱动的模拟机理,OPNET软件包含了大量网络协议和完整的无线套装[18] .产品主要分为四个系列,其中OPNET Modeler为专业技术人员提供一个网络技术和产品开发的平台.具体特点如下:1) OPNET Modeler支持IEEE802.11协议标准,提供了三层建模机制:1) 进程层(Process Level);2) 节点层(Node Level);3) 网络层(Network Level).通过链路互联设备形成网络,组织多个网络场景形成工程——网络仿真平台.2) OPNET Modeler采用分层的网络模拟方式.从协议的角度看,节点模块符合开放式系统互联OSI标准,从下到上分别为物理层、MAC层、ARP(address resolution protocol)层、IP(internet protocol)封装层、IP层、TCP层、业务层.分别对应车辆自组织网络的五层分层协议的物理层、数据链路层、网络层、传输层和应用层.3) 由于数据链路层和物理层之间的关系十分紧密,OPNET Modeler软件把物理层和数据链路层的配置放在一起.专门为车辆自组织网定制的802.11p协议,覆盖了MAC层和PHY层,对车辆自组织网络是合适的选择.4) OPNET Modeler内部集成了基于拓扑的路由协议和基于地理位置的路由协议.通过改变网络层使用的路由协议,提高车辆自组织网络的通信性能.OPNET Modeler允许手动建立应用层模型,可以使用软件内置的应用模块进行仿真,也可自定义应用模型.5) OPNET Modeler提供了丰富的网络设备模型,在实际具体应用中,OPNET Modeler软件提供的模型和实际方案在实现结构和清晰度等方面都存在限制.由于本文的仿真关注网络性能的测试研究,所以使用软件模型搭建网络模型,通过修改其模块等方式解决以上问题.本文侧重于交通系统的微观仿真模拟,在车-X通信中,使用模型库里的仿真模型,例如车辆模型选择的是“wlan_station_adv”模块.选择的车辆模型使用IEEE802.11协议,是其他模块的底层,将网络层以上概括成一个数据源和一个接收宿.尽管模型受到实际情况的限制,但问题能够通过修改其模块MAC层的源码等方式解决.3.1 模块MAC层的主要源码车辆模块MAC层的修改后的主要源码:/* Find out whether the surrounding WLAN MAC module*//* supports Hybrid Coordination Function (HCF),*//* specified in the IEEE 802.11e standard. Access the*//* WLAN configuration attribute.*/op_ima_obj_attr_get (op_id_self (),"Wireless LAN Parameters",&comp_attr_objid);comp_attr_row_objid = op_topo_child(comp_attr_objid,OPC_OBJTYPE_GENERIC, 0);/* Read the value of the corresponding attribute under*//* HCF Parameters . */op_ima_obj_attr_get (comp_attr_row_objid,"HCFParameters",&comp_attr_objid);comp_attr_row_objid = op_topo_child(comp_attr_objid,OPC_OBJTYPE_GENERIC,0);op_ima_obj_attr_get (comp_attr_row_objid,"Status",&hcf_support_int);/* Create the appropriate MAC process model.*/mac_prohandle=(hcf_support_int== OPC_BOOLINT_ENABLED)?op_pro_create ("wlan_mac_hcf",OPC_NIL):op_pro_create ("wlan_mac”,OPC_NIL);/* Make the child process the recipient of the *//* interrupts of the module.*/op_intrpt_type_register(OPC_INTRPT_STRM,mac_prohandle);op_intrpt_type_register(OPC_INTRPT_STAT,mac_prohandle);op_intrpt_type_register(OPC_INTRPT_REMOTE,mac_prohandle);/* Spawn the MAC child process. */op_pro_invoke (mac_prohandle, OPC_NIL);……3.2 模块IP层的有限状态机结构图车辆模块IP层的有限状态机结构图,如图2所示.图2 IP层的有限状态机结构图Fig.2 The Finite State Machine Structure of IP layer3.3 模块TCP层的有限状态机结构图车辆模块TCP层的有限状态机结构图,如图3所示.总之,在IEEE 802.11协议的无线局域网中,首先对各种行为进行单独建模,其次通过有限状态机集合成为一个统一的整体系统,最后形成IEEE 802.11协议支持的模块.4 城市道路交通场景下V2V仿真实例近十年来车辆自组织网络领域的研究比较活跃,出现大量的通信方式和协议.在城市道路复杂交通场景下,车辆的运动方式是任意的,无法预测的.但是在单跳城市道路交通场景下,确定车辆的运动趋势相对容易,除交叉口外,车辆节点呈线状分布.因为网络拓扑结构变化不大,因此场景设计的车辆运动轨迹相对单一.根据车辆自组织网络的技术特点,建立车辆模型.在模拟仿真过程中忽略不必要因素,以西部中、小城市道路交通场景下V2V为例对车辆自组织网络总体性能进行评估.图3 TCP层的有限状态机结构图Fig.3 The Finite State Machine Structure of TCP layer4.1 网络拓扑结构城市道路从等级上可划分为快速路、主干路、次干路和支路等类型.快速路车辆可以保持在60~80 km/h的行驶速度,车道宽度一般为3.5~3.75 m;主干路一般为双向6~8车道,设计车速为40~60 km/h,车道宽度一般为3.25~3.5 m;一般情况下,次干路设计车速为30~40 km/h,次干路的非机动车道的宽度大约3.0~3.5 m;支路车速为小于30 km/h.在西部中、小城市道路交通场景下,仿真运行线路设定为5 000 m,忽略车道的宽度.利用OPNET Modeler 仿真平台建立由8个车辆节点组成的车辆无线通信网络模型.双向8个机动车道.其中,4辆车由西向东行使,4辆车由东向西行使,平均速度设为30 km/h,地面无线接入点分别为AP1,AP2,AP3,AP4,…,AP7,路侧单元分别为Server-1、Server-2和 Center server,地面无线接入点、路由器和服务器等设备通过100BaseT链路连接.建立一个模拟的车辆-车辆和车辆-基础设施的网络场景,一个能够适用于车辆-车辆(V2V)网络的路由协议,并在8个车辆节点分别应用DSR(Dynamic Source Routing)协议和AODV(Ad Hoc On Demand Distance Vector)协议,比较二者在无线车辆-车辆通信网络时的性能.仿真时间为600 s,网络拓扑结构如图4所示.图4 车辆-车辆通信网络拓扑结构图Fig.4 The V2V of VANET Network Topology Structure4.2 性能评价标准主要根据下列评价标准进行性能评估:1) 无线网络时延;2) 无线网络吞吐量;3) 无线网络负载.4.3 仿真结果仿真结果如图5所示.对比图中显示AODV协议在网络平均时延、吞吐量以及负载等方面都比DSR协议占有优势,更适合车辆自组织网络的通信需求.从图5仿真结果分析得出:1) 从网络平均时延方面性能看,AODV协议比DSR协议占有优势.因为AODV协议使用序列号减小数据包重发几率.而DSR协议发送的数据包都增加了报文的长度,导致时延要长于AODV协议.图5 车辆-车辆通信网络Wireless LAN参数变化Fig.5 The V2V of VANET Wireless LAN parameter variation2) AODV协议的吞吐量高于DSR协议.因为AODV协议具有DSR协议的路由发现和路由维护功能,同时使用了逐跳路由、序列号等.与DSR协议比,AODV协议提高了网络的利用率.3) DSR协议的负载小于AODV协议.这是由于AODV协议路由负载主要是路由请求分组.而DSR协议的路由负载是路径错误包和路由应答分组,所以最大程度降低了路由负载.5 结论使用OPNET Modeler软件建立城市道路交通场景下基于物联网的智能交通系统多跳场景V2V的无线数据通信场景,评估了V2V场景下的无线网络总体性能.仿真实验表明在低速运动中,对于车辆-车辆(V2V)通信网络,AODV路由协议在网络平均时延、吞吐量、路由负载等性能上都比DSR路由协议更适合实际网络的通信要求.因为AODV协议采用逐跳路由,AODV协议在路由条目中包含了目的节点序列号,虽然需要维护路由表,但在低速运动中,由于节点的低速运动使得网络拓扑结构变化不大.但在高速运动中,由于增加了大量过期的路由条目,过期的路由会影响路由的准确性.因此,AODV协议不太适用于拓扑变化频繁的移动网络.但GPSR(greedy perimeter stateless routing)协议采用贪婪转发策略并不需要维护完整路由,也未使用路由表及路由缓存.因此,GPSR协议更加适用于高速运动的车辆自组织网络,未来的仿真研究侧重于此.近年来车辆自组织网络领域的研究比较活跃,出现大量的通信方式和协议,今后的主要研究方向是向实地实验发展,研究在城市复杂交通环境下V2V场景的网络平台构建与性能优化.【相关文献】[1] HANNES H,KENNETH P L.VANET车载网技术及应用[M].孙利民,何云华,周新运,译.北京:清华大学出版社,2013.[2] DAMITH C R.物联网RFID多领域应用解决方案[M].北京:机械工业出版社,2014.[3] ZHANG Y,TAN I L,LABERTEAUX K,et al.A differential OFDM approach to coherence time mitigation in DSRC[C]//ACM International Workshop on Vehicular Inter-Networking.ACM,2008:1-6.[4] AHMEDZAID F,CARTER A.Vehicle Safety Communications - Applications VSC-A.First Annual Report December 7,2006 through December 31,2007[J].Communication Systems,2009.[5] 宋超.无线Ad Hoc网络路由算法研究[D].西安:电子科技大学,2009.[6] 揭志忠.高速公路环境VANET的高效路由算法研究[D].武汉:武汉大学,2013.[7] 朱东杰.车载自组网路由协议及路径决策模型研究[D].哈尔滨:哈尔滨工业大学,2015.[8] WANG N W,HUANG Y M,CHEN W M.A novel secure communication scheme in vehicular ad hoc networks[J].Computer Communications,2008,31(12):2827-2837.[9] 李桂森.车载自组织网络数据分发技术研究[D].杭州:浙江工业大学,2012.[10] 朱晓玲.VANET安全和隐私保护机制研究[D].合肥:合肥工业大学,2013.[11] 肖玲,李仁发,罗娟.车载自组网的仿真研究综述[J].系统仿真学报,2009,21(17):5330-5335.[12] 孙剑,吴志周.车路协同系统一体化仿真实验平台[J].实验室研究与探索,2014,33(2):75-78.[13] APRATIM C,TOMASZ M,CHETAN B,et al.An integrated simulation environment for testing V2X protocols and applications[C]//The International Conference on Computationa Science.ICCS 2016.Procedia Computer Science,2016,80(C):2042-2052. [14] 陈永,党建武,王晓明.基于元胞自动机理论的兰州快速公交系统交通仿真与分析[J].兰州交通大学学报,2012,31(1):118-122.[15] 王江卫,党建武.改进Agent的交通流混合建模与仿真[J].兰州交通大学学报,2015,34(3):113-117.[16] 刘应东,牛惠民.考虑减速度阈值的交通流元胞自动机模型[J].兰州交通大学学报,2015,34(4):95-99.[17] 邹力.物联网与智能交通[M].北京:电子工业出版社,2012.[18] 张铭,窦赫蕾,常春藤,等.OPNET Modeler与网络仿真[M].北京:人民邮电出版社,2007.。

第29卷第6期江苏理工学院学报JOURNAL OF JIANGSU UNIVERSITY OF TECHNOLOGY Vo l.29,No.6 Dec.,20232023年12月近年来,随着网络通信技术与智能交通系统的快速发展,车载自组织网络(Vehicular Ad Hoc Network,VANET)愈发受到广泛的关注[1]。
VANET 作为一种快速组网技术,用于实现车联网环境下的车与车通信(V2V)、车与路侧单元通信(V2R)、车与行人通信(V2P)等,使得车辆能够感知视距范围外的交通信息,从而很大程度上减少了交通事故,提高了交通效率和安全性[2]。
在车联网环境中,车辆间通过广播基础安全消息(Basic Safety Message,BSM)或合作感知信息(Cooperative Awareness Message,CAM)帮助驾驶员做出及时准确的驾驶决策,2种信标消息都包含相同的内容(包括发送车辆的位置和行驶状态)[3]。
然而,由于车辆的高速移动性、网络拓扑的动态变化性以及无线信道的开放性等,车载自组织网络的部署面临着多种网络安全问题和挑战[4]。
此外,由于VANET缺乏相应的安全基础设施,车联网中的内部节点容易遭受多种网络攻击[5],如拒绝服务攻击、虚假信息欺骗攻击等[6]。
在欺骗攻击中,被攻击车辆通过广播虚假消息误导周边车辆,极容易造成严重的交通事故。
此类网络攻击往往无法使用消息加密技术进行防范,因为其发生在VANET的内部。
这些节点是经过合理认证的内部成员,拥有有效的网络访问密钥凭证[7],能够在网络中传输合法信息并进行通信。
因此,需要利用攻击检测系统对联网车辆的信标消息进行检验,过滤不合理消息,进而起到保障车辆网络安全的效果。
现有的攻击检测机制可归结为2种类型:以数据为中心、以节点为中心。
以数据为中心的检测机制对信标消息的数据语义进行可信度评估,以确保传输数据的正确性和连续性。
以数据为中心车联网环境下基于CNN-LSTM的行驶信息欺骗攻击检测梁乐威1,陈宇峰2,向郑涛1,游康祥1,周旭1(1.湖北汽车工业学院电气与信息工程学院,湖北十堰442002;2.湖北汽车工业学院汽车工程师学院,湖北十堰442002)摘要:当联网车辆遭受网络攻击时,会向外广播虚假行驶信息,从而误导周边车辆,极易引发交通事故。
————————————基金项目:国家自然科学基金资助项目(61173188)。
作者简介:郭松矗(1989-),男,硕士研究生,主研方向:网络与信息安全;崔 杰,讲师、博士。
收稿日期:2013-03-07 修回日期:2013-06-04 E-mail :guosongchu@面向车载自组网的高效位置隐私保护查询方案郭松矗,崔 杰(安徽大学计算机智能与信号处理教育部重点实验室,合肥 230039)摘 要:随着车载自组网应用对安全性要求的提高,用户和服务提供商对各自私有信息保密性的要求也越来越高。
针对现有查询方案无法同时保护车辆身份、位置及服务提供商数据隐私的问题,利用私有信息检索技术,提出一种高效的位置服务查询方案。
采用匿名认证的方法进行车辆间的相互认证与车辆及路边基站的认证。
在此基础上,使用安全硬件对数据库的数据进行混淆处理,通过代理重加密完成车辆对数据库服务数据的检索,从而实现车辆和数据库双方的隐私保护。
分析结果表明,该方案可实现车辆身份匿名查询,能够保护车辆位置隐私和服务提供商的数据库信息,且只需两轮通信,具有较高的通信效率。
关键词:车载自组网;基于位置服务;代理重加密;双线性映射群;匿名认证Efficient Location Privacy Preserving Query SchemeOriented to V ANETsGUO Song-chu, CUI Jie(Key Laboratory of Intelligent Computing & Signal Processing, Ministry of Education, Anhui University, Hefei 230039, China) 【Abstract 】With the enhanced security requirements of the Vehicular Ad Hoc Networks(V ANETs) applications, vehicles and service providers have a high demand on their privacy information. The traditional privacy preserving query schemes of mobile devices cannot both protect the privacy information of the vehicle and the service provider database. This paper proposes an efficient location service query scheme by using the Private Information Retrieval(PIR) technology. Vehicles verify other vehicles and roadside base station by anonymous authentication. Meanwhile, the data of the service provider database is confused by the secure coprocessor, and the query service is implemented by the Proxy Re-cryptography(PRC) algorithm. The scheme can protect the privacy information of both vehicle and service provider database. Analysis shows that this scheme not only achieves the vehicle’s anonymous query, but also protects both the location privacy of vehicles and the data privacy of service provider databases. Moreover, the communication cost is only twice, and has the high efficiency of communication.【Key words 】Vehicular Ad Hoc Networks(V ANETs); Location-based Services(LBS); Proxy Re-cryptography(PRC); bilinear mapping groups; anonymous authenticationDOI: 10.3969/j.issn.1000-3428.2014.06.022计 算 机 工 程 Computer Engineering 第40卷 第6期 V ol.40 No.6 2014年6月June 2014·安全技术· 文章编号:1000-3428(2014)06-0099-05 文献标识码:A中图分类号:TP3091 概述车载自组网(Vehicular Ad Hoc Networks, VANETs)是移动自组织网络(Mobile Ad Hoc Networks, MANETs)的一种。
V2V通信网络的性能分析与优化研究近年来,随着智能交通系统的不断发展,车辆对车辆(V2V)通信网络的需求也越来越大。
V2V通信网络可以实现车辆之间的实时信息交互,包括车辆位置、速度、行驶方向、路况等等,从而提高驾驶安全性和交通效率。
然而,由于V2V通信网络中存在许多复杂的因素,如信号干扰、多路径衰减、网络拥塞等,这种网络的性能稳定性和可靠性受到了很大挑战。
本文旨在对V2V通信网络的性能进行深入分析和优化研究,以期提高其性能表现和可靠性,为智能交通系统的发展做出贡献。
一、V2V通信网络的构成和特点V2V通信网络是由多个车辆组成的自组织网络,通信节点是车辆本身。
车辆通过射频信号相互通信,从而实现信息交换和传递。
由于V2V通信网络的特点在于移动性和动态性,无需基础设施支持,因此其成本相对较低且易于部署。
V2V通信网络面临的主要问题是信号传输时存在的干扰和多路径衰减。
这两个因素都会导致信号质量下降,从而影响网络的性能表现。
此外,由于车辆在行驶过程中可能会同时处于多个V2V通信网络之间,网络拥塞问题也需要得到充分考虑。
二、V2V通信网络的性能分析1. 信号传输时的干扰问题V2V通信网络面临的干扰主要来自于两个方面。
一方面是同频信号的干扰,这种干扰来自于和本信号频率相同的其他发射机。
另一方面是异频信号的干扰,这种干扰来自于那些和本信号频率不同但相距较近的发射机。
在实际应用中,由于收发机的实现和车辆行驶状态的不同,这些干扰因素会在不同情况下占据主导地位。
为了解决干扰问题,通常采用的方法是增加信号传输功率、降低干扰源的信号功率、优化调制方式等。
此外,经过一定的干扰抵消算法可以有效提高信号质量。
2. 信号传输时的多路径衰减问题多路径衰减问题在V2V通信网络中也非常普遍。
它主要来自于车辆周围的反射面和散射体,这些物体会改变信号传输的路径,从而导致信号在传输过程中发生衰减。
在处理多路径问题时,可采取的解决方案包括引入多路径补偿技术、使用成簇天线减少信号在散射体上的反射和散射等。
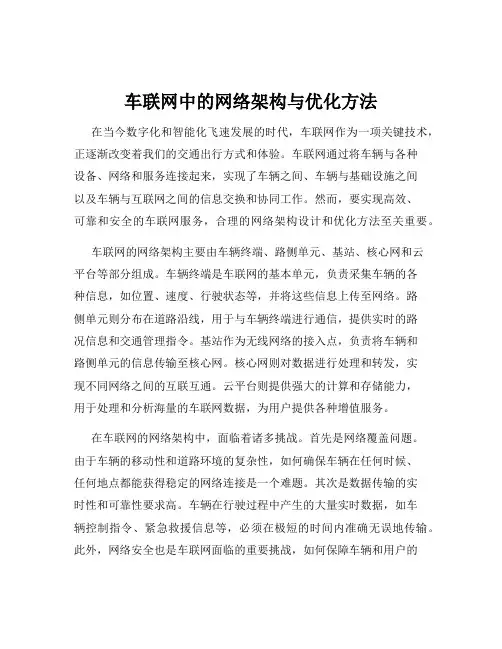
车联网中的网络架构与优化方法在当今数字化和智能化飞速发展的时代,车联网作为一项关键技术,正逐渐改变着我们的交通出行方式和体验。
车联网通过将车辆与各种设备、网络和服务连接起来,实现了车辆之间、车辆与基础设施之间以及车辆与互联网之间的信息交换和协同工作。
然而,要实现高效、可靠和安全的车联网服务,合理的网络架构设计和优化方法至关重要。
车联网的网络架构主要由车辆终端、路侧单元、基站、核心网和云平台等部分组成。
车辆终端是车联网的基本单元,负责采集车辆的各种信息,如位置、速度、行驶状态等,并将这些信息上传至网络。
路侧单元则分布在道路沿线,用于与车辆终端进行通信,提供实时的路况信息和交通管理指令。
基站作为无线网络的接入点,负责将车辆和路侧单元的信息传输至核心网。
核心网则对数据进行处理和转发,实现不同网络之间的互联互通。
云平台则提供强大的计算和存储能力,用于处理和分析海量的车联网数据,为用户提供各种增值服务。
在车联网的网络架构中,面临着诸多挑战。
首先是网络覆盖问题。
由于车辆的移动性和道路环境的复杂性,如何确保车辆在任何时候、任何地点都能获得稳定的网络连接是一个难题。
其次是数据传输的实时性和可靠性要求高。
车辆在行驶过程中产生的大量实时数据,如车辆控制指令、紧急救援信息等,必须在极短的时间内准确无误地传输。
此外,网络安全也是车联网面临的重要挑战,如何保障车辆和用户的隐私和数据安全,防止黑客攻击和恶意篡改,是车联网发展必须解决的问题。
为了解决这些挑战,需要采用一系列的优化方法。
在网络覆盖方面,可以通过增加基站密度、采用多频段组网和优化天线覆盖等方式来提高网络的覆盖范围和信号质量。
同时,利用卫星通信和自组织网络等技术,为车辆在偏远地区和网络覆盖薄弱区域提供通信保障。
对于数据传输的实时性和可靠性问题,可以采用优先级调度、资源预留和多路径传输等技术。
优先级调度可以根据数据的重要性和紧急程度,为不同类型的数据分配不同的传输优先级,确保关键数据的优先传输。
建设科技 ∣771 引言车联网系统是以“车”为节点和信息源,通过无线通信、大数据、人工智能等技术手段将获取的信息连接到业务应用平台进行管理、分析和深度挖掘,并提供包括交通管理、用户安全和休闲娱乐等综合性服务的信息系统,其可以显著提升城市交通运输系统效率和服务水平,减少交通事故和污染。
车联网技术作为引领智能汽车路云一体化车联网系统刘阳 张颂歌 田大新(北京航空航天大学交通科学与工程学院,北京 102206)[摘要]随着智能化网联化汽车的发展,车联网系统无时无刻不在产生着海量的交通数据,车路终端自身的计算能力已难以处理复杂任务,传统的集中式云计算技术已无法应对智能车联网应用中数据量大、传输延迟高、实时处理性低等瓶颈问题。
车路云一体化系统以车载、路侧、云端等多源数据融合为基础,依赖车路云协同组网传输的可靠性和效率,借助云端计算和边缘计算对系统整体资源进行联合调度优化,共同实现车联网系统安全和效率的最大化。
[关键词]车联网系统;车路云一体化;智慧城市;边缘计算Internet of Vehicles System by Vehicle-Road-Cloud IntegrationLIU Yang, Zhang Songge,Tian Daxin(School of Transportation Science and Engineering, Beihang University, Beijing 102206)Abstract : With the development of intelligent and connected vehicles, the Internet of Vehicles (IoV) system generates massive traffic data all the time. The computing power of vehicular terminals and infrastructures is no longer able to process complex tasks. Traditional centralized cloud computing technology cannot deal with the bottleneck problems in IoV applications, such as large data volume, high transmission delay, and low real-time processing. The vehicle-road-cloud IoV system is based on the integration of multi-source device data from on-board, roadside, and cloud. Relying on the reliability and efficiency of vehicle-road-cloud collaborative networking transmission, this system applies cloud computing and edge computing to jointly schedule and optimize the overall resources to maximize the safety and efficiency of the IoV system.Key words : Internet of Vehicles system; vehicle-road-cloud integration; smart city; edge computing车、智能交通未来发展的前沿技术,已引起社会各界的广泛关注,不仅受到美国、欧洲、日本等发达国家交通管理部门的重视,而且已经成为全球各大汽车、通信企业前瞻储备技术研发的重点。