Pointools点云数据处理软件
- 格式:docx
- 大小:22.90 KB
- 文档页数:2
KubitPointCloud软件集成在AutoCAD平台下,保证了点云数据的精确性,以及用户的操作性。
功能特点(1)在AutoCAD中显示、分析、处理数以亿计的三维点。
(2)简洁、高效的操作命令。
如:自动拟合线、拟合面、快速定义用户坐标系。
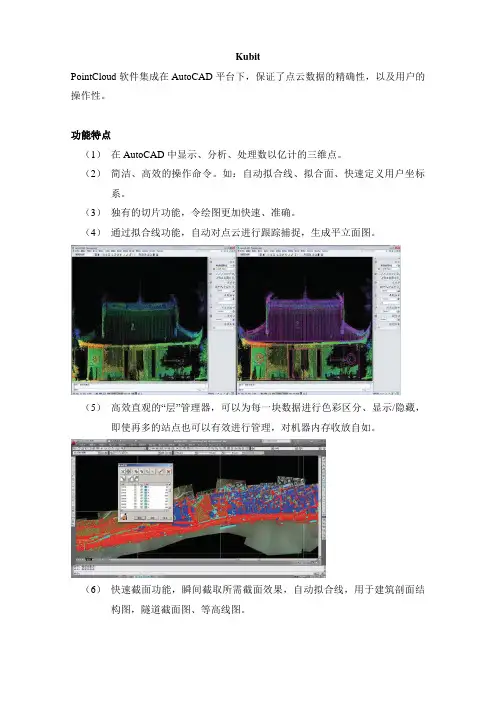
(3)独有的切片功能,令绘图更加快速、准确。
(4)通过拟合线功能,自动对点云进行跟踪捕捉,生成平立面图。
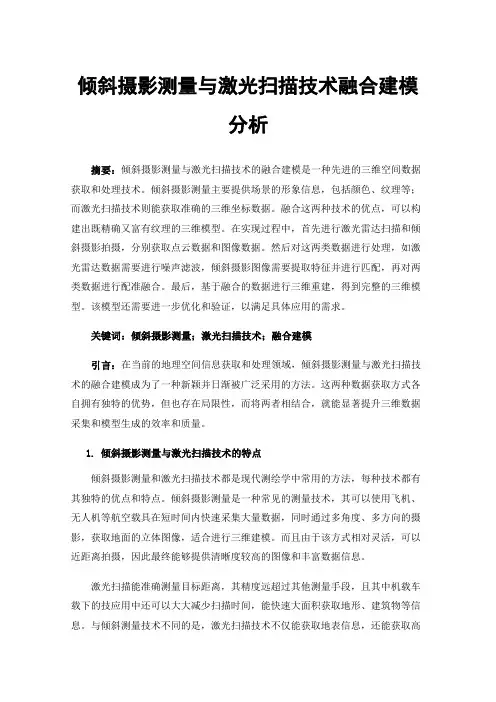
(5)高效直观的“层”管理器,可以为每一块数据进行色彩区分、显示/隐藏,即使再多的站点也可以有效进行管理,对机器内存收放自如。
(6)快速截面功能,瞬间截取所需截面效果,自动拟合线,用于建筑剖面结构图,隧道截面图、等高线图。
(7)使用点云生成高分辨率的正射影像,使绘图更加简便、高效。
生成的正射影像图还可以用于数字化存档。
(8)PointCloud提供了一种绝佳的绘图功能-图像真实绘图,结合了点云的三维空间优势及照片的高分辨率优势,通过匹配在点云上的照片直接进行绘图,相应的线会直接绘制在真实的位置上,不再因为点云的密度而丢失掉细节。
(9)PointCloud可以使Faro Scene、RiscanPro与AutoCAD实时传输,同时打开两个软件就可以根据扫描的点云影像实时绘图(10)PointCloud支持在南方cass软件下运行,对点云数据进行地形图的绘制。
(11)高程地图图例使用更改颜色命令,用户可能会通过当前用户坐标系的XY平面的距离对截面进行着色。
通过这种方式,点云高程地图的创建就无需定义任意的切片了。
(12)平面物体形变分析(13)3D模型和Kubit平面命令,生成空间三面体。
因此相交点和选择的三个平面相交线是可见的。
此命令使通过平面方式生成3D线框模型变得更加简单。
倾斜摄影测量与激光扫描技术融合建模分析摘要:倾斜摄影测量与激光扫描技术的融合建模是一种先进的三维空间数据获取和处理技术。
倾斜摄影测量主要提供场景的形象信息,包括颜色、纹理等;而激光扫描技术则能获取准确的三维坐标数据。
融合这两种技术的优点,可以构建出既精确又富有纹理的三维模型。
在实现过程中,首先进行激光雷达扫描和倾斜摄影拍摄,分别获取点云数据和图像数据。
然后对这两类数据进行处理,如激光雷达数据需要进行噪声滤波,倾斜摄影图像需要提取特征并进行匹配,再对两类数据进行配准融合。
最后,基于融合的数据进行三维重建,得到完整的三维模型。
该模型还需要进一步优化和验证,以满足具体应用的需求。
关键词:倾斜摄影测量;激光扫描技术;融合建模引言:在当前的地理空间信息获取和处理领域,倾斜摄影测量与激光扫描技术的融合建模成为了一种新颖并日渐被广泛采用的方法。
这两种数据获取方式各自拥有独特的优势,但也存在局限性,而将两者相结合,就能显著提升三维数据采集和模型生成的效率和质量。
1.倾斜摄影测量与激光扫描技术的特点倾斜摄影测量和激光扫描技术都是现代测绘学中常用的方法,每种技术都有其独特的优点和特点。
倾斜摄影测量是一种常见的测量技术,其可以使用飞机、无人机等航空载具在短时间内快速采集大量数据,同时通过多角度、多方向的摄影,获取地面的立体图像,适合进行三维建模。
而且由于该方式相对灵活,可以近距离拍摄,因此最终能够提供清晰度较高的图像和丰富数据信息。
激光扫描能准确测量目标距离,其精度远超过其他测量手段,且其中机载车载下的技应用中还可以大大减少扫描时间,能快速大面积获取地形、建筑物等信息。
与倾斜测量技术不同的是,激光扫描技术不仅能获取地表信息,还能获取高程信息,因此,它可以为制图、测绘、城市规划等提供更全面的数据支持[1]。
除了常规的地形、地貌测量,还可用于林业、电力、铁路等多领域。
在本文中,将两种技术通常会结合使用,以发挥各自的优势,获取更准确的地形或者建筑物信息。
ros2 中点云的格式一、点云数据在ROS2中的重要性在机器人视觉和SLAM领域,点云数据是重要的输入信息。
通过分析环境中的点云,我们可以获取环境的几何信息,进而进行路径规划、物体识别等任务。
ROS2作为一款功能强大的机器人操作系统,对点云数据的处理和格式有严格的要求。
1. PCL格式:PCL(Point Cloud Library)是一种广泛使用的点云处理库,其格式是点云数据常用的输出格式之一。
PCL格式包含了点云数据的所有信息,包括每个点的坐标、法线、颜色等。
2. XML格式:XML(Extensible Markup Language)是一种标记语言,用于描述数据结构和格式。
XML格式可以方便地存储和交换点云数据,包括几何信息、拓扑结构等信息。
3.二进制格式:二进制格式通常用于高效地传输和存储点云数据,它可以节省空间,提高传输速度。
ROS2也支持二进制格式的点云数据。
三、点云数据的处理流程在ROS2中,点云数据的处理通常包括获取、预处理、特征提取、后处理等步骤。
在处理过程中,我们需要根据不同的应用场景选择合适的格式来存储和传输数据。
四、如何将其他格式的点云数据导入ROS2如果现有的点云数据不是ROS2支持的格式,我们需要进行转换。
常用的点云数据转换工具包括PointCloudToolkit、PCL12等。
在转换过程中,我们需要确保数据的完整性,并遵循ROS2对点云数据的要求。
五、总结ROS2中对点云数据的处理和格式有严格的要求,常见的格式包括PCL、XML和二进制格式。
在处理点云数据时,我们需要根据应用场景选择合适的格式来存储和传输数据。
如果现有的点云数据不是ROS2支持的格式,我们需要进行转换。
为了获得更好的处理效果,我们还需要对点云数据进行预处理、特征提取等操作。
点云处理基本流程点云处理是指对三维点云数据进行分析、处理和提取有用信息的过程。
点云处理常见应用于数字化建模、机器视觉、地形分析等领域。
下面将介绍点云处理的基本流程。
1.数据获取:点云数据可以通过多种方式获取,例如激光雷达扫描、摄影测量、结构光等。
在数据获取阶段,需要选择合适的方法和设备,并将获取的数据转化为点云格式。
2.预处理:点云数据获取后,通常需要进行预处理,以去除无效点、噪声点和重复点,提升点云质量。
预处理过程包括点云滤波、点云配准和点云拼接。
-点云滤波:使用滤波算法对点云数据进行噪声去除,常见的滤波算法有统计滤波、高斯滤波、中值滤波等。
- 点云配准:将多个点云数据对齐到同一个坐标系,以实现点云数据的拼接和融合。
常见的配准方法有ICP(Iterative Closest Point)算法、特征点配准等。
-点云拼接:将多个点云数据拼接成一个完整的点云模型,以对场景进行全面描述。
3.特征提取:通过特征提取算法,从点云数据中提取出能够表示点云特性的特征,用于后续的分析和处理。
点云的特征可以包括形状特征、颜色特征等。
-形状特征:通过点云数据的几何形状信息提取特征,例如点云的表面法线、曲率等。
-颜色特征:通过点云数据的颜色信息提取特征,例如点云的RGB颜色、HSV颜色等。
4.点云分割:点云分割是将点云数据划分成不同的区域或对象的过程。
常见的点云分割方法包括基于聚类的方法、分割基于曲率的方法、分割基于局部描述符的方法等。
点云分割可以用于目标识别、场景分析等应用。
5.物体识别与分类:通过对点云数据进行特定物体的识别与分类,可以实现对场景中物体的自动识别和分类。
常见的物体识别与分类方法包括基于形状特征的方法、基于深度学习的方法等。
6.三维重建与建模:基于点云数据进行三维重建与建模可以获取真实世界的三维几何和拓扑信息。
常见的三维重建与建模方法包括点云拟合、网格重建、基于体素的方法等。
7.数据分析与可视化:对处理后的点云数据进行分析和可视化,以提取有用信息。
点云数据在形状检测和分类、立体视觉、运动恢复结构、多视图重建中都有广泛的使用。
点云的存储、压缩、渲染等问题也是研究的热点。
随着点云采集设备的普及、双目立体视觉技术、VR和AR的发展,点云数据处理技术正成为最有前景的技术之一。
PCL是三维点云数据处理领域必备的工具和基本技能。
1. 点云滤波(数据预处理)点云滤波,顾名思义,就是滤掉噪声。
原始采集的点云数据往往包含大量散列点、孤立点点云滤波的主要方法有:双边滤波、高斯滤波、条件滤波、直通滤波、随机采样一致滤波、VoxelGrid滤波等,这些算法都被封装在了PCL点云库中。
2. 点云关键点我们都知道在二维图像上,有Harris、SIFT、SURF、KAZE这样的关键点提取算法,这种特征点的思想可以推广到三维空间。
从技术上来说,关键点的数量相比于原始点云或图像的数据量减小很多,与局部特征描述子结合在一起,组成关键点描述子常用来形成原始数据的表示,而且不失代表性和描述性,从而加快了后续的识别,追踪等对数据的处理了速度,故而,关键点技术成为在2D和3D 信息处理中非常关键的技术。
常见的三维点云关键点提取算法有:ISS3D、Harris3D、NARF、SIFT3D,其中NARF算法是用的比较多的。
3. 特征和特征描述如果要对一个三维点云进行描述,光有点云的位置是不够的,常常需要计算一些额外的参数,比如法线方向、曲率、纹理特征等等。
如同图像的特征一样,我们需要使用类似的方式来描述三维点云的特征。
常用的特征描述算法有:法线和曲率计算、特征值分析、PFH、FPFH、3D Shape Context、Spin Image等。
PFH:点特征直方图描述子,FPFH:跨苏点特征直方图描述子,FPFH是PFH 的简化形式。
4. 点云配准点云配准的概念也可以类比于二维图像中的配准,只不过二维图像配准获取得到的是x,y,alpha,beta等仿射变化参数,三维点云配准可以模拟三维点云的移动和旋转,也就是会获得一个旋转矩阵和一个平移向量,通常表达为一个4×3的矩阵,其中3×3是旋转矩阵,1*3是平移向量。
点云处理方法点云是一种三维的数据表示形式,通常用于表征物体表面的形状。
点云可以从传感器读取,也可以通过从图像中提取特征点重建得到,因此它广泛应用于计算机视觉、机器人技术、自动驾驶等领域。
对于点云的处理方法,本文将介绍以下几个方面。
一、点云预处理在点云处理之前,通常需要进行一些预处理,比如去除离群点、滤波、降采样等。
其中去除离群点会受到噪声的影响,因此需要使用一些鲁棒的算法,比较常见的有RANSAC、LO-RANSAC、MLESAC等。
滤波则是为了平滑点云,使得后续处理更加方便,常用的滤波方法有高斯滤波、中值滤波、双边滤波等。
降采样可以减小点云的数量,并节约计算资源,比较常用的方法有体素格子滤波和基于树的结构滤波等。
二、点云配准点云的配准就是把多个点云进行对齐,使得它们在同一个坐标系下表示相同的物体形状。
点云配准通常分为两个步骤:特征匹配和变换估计。
特征匹配就是根据点云的特征描述子找到两个点云之间的相同特征点,比较常用的特征描述子有SHOT、FPFH等。
变换估计就是根据匹配点计算两个点云之间的变换矩阵,常用的变换矩阵有刚体变换、相似变换和仿射变换等。
三、点云分割点云分割就是识别出点云中不同的部分,并对其进行分类。
点云分割可以用于目标检测、场景解析、机器人导航等任务。
比较常用的点云分割方法有基于形状的分割、基于语义的分割和基于区域的分割等。
其中基于形状的分割常用于物体检测,基于语义的分割常用于场景解析,而基于区域的分割则可以用于提取表面特征等。
四、点云重建点云重建就是把点云转换为三维模型,通常分为两个步骤:表面重建和拓扑连接。
表面重建就是根据点云中的点生成三角面片,一个比较常用的方法是基于网格的表面重建算法,比如Poisson重建算法、Ball-pivoting算法等。
拓扑连接就是把生成的三角面片连接成一个完整的三维模型,并去除无用的部分,比较常用的算法有基于体素的连接方法和基于边的连接方法等。
五、点云可视化点云可视化通常用于显示点云,包括显示点云颜色、显示点云形状等。
pcl点云计算方法点云计算是计算机视觉和机器人领域中的重要研究方向,它主要用于处理三维点云数据,实现目标检测、物体识别、场景重建等应用。
而PCL(Point Cloud Library)是一个开源的点云处理库,提供了丰富的点云计算方法和工具,被广泛应用于学术界和工业界。
PCL点云计算方法包括点云滤波、特征提取、配准和分割等。
首先,点云滤波是对原始点云数据进行预处理,去除噪声和离群点,提高后续计算的准确性。
常用的滤波方法有统计滤波、半径滤波和双边滤波等。
统计滤波通过计算点云中每个点的邻域点的统计特征,如平均值和标准差,来判断该点是否为噪声点。
半径滤波则是根据每个点的邻域半径内的点数来判断该点是否为离群点。
双边滤波则是结合了空间域和灰度域的信息,对点云进行平滑处理。
其次,特征提取是点云计算的关键步骤,它用于提取点云中的特征信息,如表面法线、曲率和边缘等。
这些特征可以用于目标检测和物体识别等任务。
常用的特征提取方法有法线估计、曲率计算和边缘检测等。
法线估计是通过计算每个点的邻域点的法线向量来估计该点的法线方向。
曲率计算则是通过计算每个点的邻域点的曲率来估计该点的曲率大小。
边缘检测则是通过计算每个点的邻域点的曲率变化来检测点云中的边缘。
此外,配准是点云计算中的重要任务,它用于将多个点云数据对齐到同一个坐标系中。
常用的配准方法有ICP(Iterative Closest Point)和NDT(Normal Distributions Transform)等。
ICP方法通过迭代优化的方式,将两个点云数据对齐到最小化它们之间的距离。
NDT方法则是通过建立点云数据的高斯分布模型,将两个点云数据对齐到最大化它们之间的匹配度。
最后,分割是点云计算中的重要任务,它用于将点云数据分割成不同的部分,实现目标检测和场景重建等应用。
常用的分割方法有基于区域的分割和基于模型的分割等。
基于区域的分割方法通过计算每个点的邻域点的相似度,将点云数据分割成不同的区域。
pointnet++注释摘要:1.PointNet++简介2.PointNet++的主要特点3.PointNet++的应用领域4.PointNet++的优缺点5.总结正文:PointNet++是一种用于点云数据处理的深度学习模型,它通过学习点云数据中的局部结构和全局结构,实现对三维数据的语义理解。
PointNet++在许多领域都有着广泛的应用,如无人驾驶、机器人导航、城市规划等。
PointNet++的主要特点包括以下几点:1.端到端的训练方式:PointNet++可以直接对点云数据进行端到端的训练,无需进行预处理,大大简化了模型的训练过程。
2.金字塔结构:PointNet++采用了金字塔结构,可以有效地处理不同尺度的点云数据。
3.局部结构和全局结构的学习:PointNet++可以通过学习点云数据的局部结构和全局结构,实现对三维数据的语义理解。
PointNet++的应用领域主要集中在三维数据的处理和分析,如无人驾驶、机器人导航、城市规划等。
在这些领域,PointNet++可以通过对三维数据的语义理解,实现对环境的感知和理解,从而帮助机器进行决策和规划。
PointNet++的优点在于其可以直接对点云数据进行端到端的训练,无需进行预处理,大大简化了模型的训练过程。
同时,PointNet++通过学习点云数据的局部结构和全局结构,可以实现对三维数据的语义理解,具有较高的准确性。
然而,PointNet++也存在一些缺点,如模型的训练过程较为复杂,需要进行大量的参数调整,而且模型的计算量较大,需要较高的计算资源。
总的来说,PointNet++是一种非常有效的三维数据处理模型,可以帮助机器实现对环境的感知和理解,从而进行决策和规划。
点云数据处理流程点云数据处理是三维重建、机器人导航和虚拟现实等领域的重要基础技术,其流程主要包括数据采集、点云预处理、点云分割、特征提取和物体识别等步骤。
本文将详细介绍点云数据处理的流程。
一、数据采集点云数据的来源有多种,如激光雷达、RGB-D相机和结构光等设备。
其中,激光雷达是最常用的设备之一,它通过发射激光束并接收反射信号来获取目标物体表面的三维坐标信息。
在进行数据采集时,需要注意以下几个方面:1.选择合适的设备:根据不同应用场景选择合适的设备,如室内场景可选用RGB-D相机,室外场景可选用激光雷达。
2.确定采样密度:根据目标物体大小和精度要求确定采样密度。
3.避免遮挡:在进行数据采集时需要确保被测物体没有被其他物体遮挡。
二、点云预处理点云预处理是指对原始点云进行滤波、去噪和重采样等操作以提高后续处理效果。
常用的点云预处理方法有:1.滤波:通过对点云进行高斯滤波、中值滤波等操作,可以去除噪声和异常点。
2.去噪:通过对点云进行统计学分析、距离阈值等操作,可以去除噪声和孤立点。
3.重采样:通过对点云进行降采样或升采样,可以减少数据量和提高精度。
三、点云分割点云分割是指将原始点云划分为多个子集,每个子集代表一个物体或者物体的一部分。
常用的点云分割方法有:1.基于几何特征的方法:如平面拟合、球面拟合等操作,可以将平面、球体等物体进行分割。
2.基于聚类的方法:如K-Means聚类算法、DBSCAN聚类算法等操作,可以将同一物体上的所有点划分到同一簇中。
3.基于深度学习的方法:如PointNet、PointCNN等算法,可以通过神经网络自动学习特征并进行分类和分割。
四、特征提取特征提取是指从每个子集中提取出与该物体相关的特征信息。
常用的特征提取方法有:1.基于形状特征的方法:如曲率、法向量等操作,可以提取出物体的形状信息。
2.基于纹理特征的方法:如颜色、纹理等操作,可以提取出物体的纹理信息。
3.基于深度学习的方法:如PointNet、PointCNN等算法,可以通过神经网络自动学习特征并进行分类和分割。
点云数据处理算法与应用随着三维扫描技术的日渐普及,点云数据处理已经成为一个热门的研究领域。
点云数据指的是一组离散的三维坐标点,用来表示物体的形状和表面特征。
点云数据可以用于建模、虚拟现实、机器人导航、3D打印等领域。
本文将介绍点云数据处理的算法和应用。
一、点云数据处理算法1.点云重建算法点云重建算法是将离散的点云数据转化为三维模型的算法。
其中最常用的算法是曲面重建算法。
曲面重建算法将点云数据转化为三角形网格模型。
其基本思路是利用点云数据构成网格结构,并采用一种拓扑排序方法将点集连接成线段,进而连接成三角形网格。
曲面重建算法有许多种,其中最常用的包括:Delaunay三角剖分、Alpha扩展算法、Moving Least Squares算法、Poisson重建算法。
2.点云配准算法点云配准算法是将两个或多个点云数据进行匹配的算法。
例如,在机器人导航中,机器人需要利用激光雷达获取环境中的点云数据,并通过点云配准算法将不同时间获取的点云数据进行匹配,形成一个准确的环境地图。
点云配准算法有许多种,其中最常见的算法包括:Iterative Closest Point算法、Global Registration算法、Local Registration算法以及基于图结构的匹配算法。
3.点云分割算法点云分割算法是将点云数据中的不同部分进行区分的算法。
例如,在医学图像处理中,点云分割可以用于分离颅骨、脑组织、血管等组织结构。
点云分割算法有许多种,其中最常用的包括:基于形状的分割算法、基于颜色的分割算法、基于深度的分割算法、基于深度学习的分割算法。
4.点云识别算法点云识别算法是将点云数据中的特定目标识别出来的算法。
例如,在自动驾驶领域,点云识别可以用于识别行人、车辆、路标等目标。
点云识别算法有许多种,其中最常用的算法包括:基于机器学习的识别算法、基于模型匹配的识别算法、基于特征描述子的识别算法、基于人工神经网络的识别算法。
工厂三维扫描数字化项目2016年09月目录一、概述 (3)二、项目计划方案: (4)1.测量要求 (4)2.入场设备 (5)3.测量流程: (6)(1)扫描测量: (6)(3)外业数据采集设备列表: (12)(4)施工计划: (13)(5)人员安排计划: (14)三、内业数据处理流程: (15)四、数据提交: (16)五、数据处理软件介绍: (17)附:三维扫描仪厂家介绍以及技术参数: (22)一、概述随着三维激光扫描技术的发展,三维激光扫描作为一种最先进的数字测量方式,不仅高精度采集现场真实坐标数据,而且其提供的通用数据还可以做为后期规划、建模、精度分析、制图、资料存档、变形检测等工作的理想测量数据来源。
除了能够提供高精度数字三维点云,三维扫描仪还实现结合Geomagic Studio等建模软件建立工厂模型。
使用三维激光扫描仪最重要的原因是通过三维扫描成像系统可以快速有效的完成工厂测量工作,满足了使用者数字化处理及建模的需要。
三维档案的记录保证了现场环境在计算机中的真实还原,为工厂分析及后期安装提供最佳的三维档案研究资料。
三维扫描仪的优势就在于可替代传统的测量方式高精度全面记录施工现场全部三维信息。
二、项目计划方案:1.测量要求(1)、测量范围为工厂内1150平方米区域吊顶上到二层楼板下所有管线、建筑、设备结构。
(2)、工厂区域长40米、宽30米。
使用三维扫描仪进行现场扫描。
(3)、结构每隔2.5m扫描一站,完成工厂扫描约共需180站扫描。
(4)、三维激光测量数据采集精度2mm,每站预计仪器工作时间6分钟,平均每站用时10分钟。
预估计需要3个工作日时间(24小时工作时)。
(5)、数据成果交付要求:a、扫描测量原始数据文件b、数据拼接后的点云图c、工厂三维模型数据Reviet格式d、工厂点云漫游成果2.入场设备:FARO Focus3D 330三维激光扫描仪、扫描仪专用参考球扫描仪专用脚架、单反相机、图形工作站FAROFocus 3DS 3303.测量流程:(1)扫描测量:总体扫描测量规划:扫描前准备参与人员:扫描仪操作员1人(有至少3年外业扫描经验人员)安全员1人,设备准备:扫描仪主机、电池、脚架、SD卡、脚架连接器、棱参考球八个、相机、笔记本电脑、纸笔、安全帽、反光衣、安全绳测量对象:客户工厂测量区域,根据客户要求进行三维扫描测量。
pclvisualizer用法-回复pclvisualizer是一个在点云数据处理中常用的可视化工具,它能够帮助用户直观地展示点云数据,并对其进行交互式操作和分析。
在本文中,我们将一步一步地介绍pclvisualizer的使用方法,并以此为基础解释其各项功能和特点。
首先,我们需要正确配置并安装pclvisualizer。
pclvisualizer是PCL(点云库)的一部分,因此在使用之前,我们需要先安装并配置好PCL。
PCL 的安装过程涉及到相关库的依赖和编译,具体步骤可以参考PCL官方文档。
一旦完成PCL的配置和安装,我们就可以开始使用pclvisualizer了。
第二步是创建一个pclvisualizer的实例。
我们需要在代码中引入pcl/visualization/pcl_visualizer.h头文件,并创建一个pcl::visualization::PCLVisualizer对象。
这个对象将作为我们展示点云数据的画布。
接下来,我们可以通过调用pclvisualizer的addPointCloud函数向画布中添加点云数据。
这个函数接受一个PointCloud类型的参数,用于指定待展示的点云数据。
此外,我们还可以为点云数据指定一个可选的颜色或者RGB属性,以便对不同部分进行区分。
添加点云数据之后,我们可以对其进行视角的调整和操作。
pclvisualizer提供了一些常用的交互式操作函数,如setCameraPosition和resetCameraViewpoint。
我们可以通过这些函数来改变视角、缩放和旋转点云数据,以获得更好的观察效果。
除了基本的点云展示和交互功能,pclvisualizer还提供了一系列高级功能,如点云配准、特征提取和重建等。
这些功能可以通过调用pclvisualizer 的相应函数来实现。
例如,我们可以使用pclvisualizer的addLine函数来添加线段数据,使用addCylinder函数来添加圆柱数据等。
/ Pointools点云数据处理软件Bentley Pointools点云数据处理软件在单一工作流中,能快速实现可视化、
操作、动画和点云编辑。
这种简化的流程可以帮助您减少生产时间,提高整体准确度。
1、高性能点云引擎
2、快速进行详图制作、以层为基础的编辑和数据细分
3、专业质量的图片、动画和影片
4、碰撞检测
Bentley Pointools 由点云引擎Pointools Vortex 提供支持,可支持大型点云。
用户可以处理包含数十亿点的大型数据集,以交互方式管理场景参数并快速加载和卸载本地格式点云POD 模型。
您将体验到高性能传输与点云密度、清晰度和细节的最大视觉。
拥有Bentley Pointools,您可以轻松导入和查看三种类型的对象:
1、点云,可从大范围的扫描仪导入
2、纹理三维模型,可从大量常用模型格式中导入
3、二维CAD 制图,可从DXF,DWG 和SHP 文件格式导入
生成专业品质的图片、动画和电影,或高分辨率平剖图和透视图,满足您的项目需求
Bentley Pointools点云数据处理软件功能介绍
创建动画、视频和漫游场景:通过呈现任何大小的快照,生成高分辨率的平剖图和透视图。
使用输出标尺、刻度和定位来设置图像大小和刻度,以便能够准确重复利用。
充分利用基于时间的、直观逼真的漫游场景和对象动画系统,轻松快速地生成电影。
/
从点云中检测冲突:将点云数据值扩展至您的设计流程中。
无论您是在使用Bentley 的Navigator,还是Descartes 产品,均可在决策流程中利用现实世界数据和建议设计之间的冲突检测。
区分点云:自动标识对象之间的差异。
您可以比较同一区域中的两个点云,并标识数据中出现的任何增减。
使用差异工具可检测更改,并随时监控建筑工地的进度和其他管理项目。
编辑点云:使用点层技术编辑点云的大型数据集,实现无与伦比的编辑速度。
在128 个层之间移动点,隔离要详细编辑的区域。
操作、清理或细分点云模型,以便清洁和丰富点云模型,使其更易于重复利用。
从点云中为几何图形建模:从点云中提取断线、绘图线、表面、平面、圆柱和圆柱中心线。
有效剪辑和切割点云,从点云中简化矢量提取流程。
处理与可视化大规模点云数据:利用高性能显示技术,处理并可视化具有数以亿计的庞大数据点集。
可视化点云通过多种细微渐变选项,使视觉诠释更加简便。
对点云进行批注:向点云添加注释,确保项目的每位参与者拥有最新信息,能够远程审查现场,并且可以准备现场操作。