磁悬浮轴承功率放大器设计
- 格式:pdf
- 大小:165.81 KB
- 文档页数:3
磁悬浮技术基本原理及磁悬浮轴承的应用和分析戴进墩(上海交通大学电信学院,上海市,200240)摘要:文中介绍了磁悬浮原理和磁悬浮轴承的研究和应用,指出了磁悬浮研究的方向。
关键词:磁悬浮轴承The Basic Principle of EML and Application and Analysis of Magnetic BearingsDai Jindun(Telecommunications Institute,Shanghai Jiao Tong University,Shanghai200240,PR China)Abstract:This paper presents the working principle of magnetic suspension and the research on magnetic suspension bearings as well as their application.The research direction of the magnetic suspensiontechnology is also pointed out.Key Words:Magnetic Bearing;superconductivity0引 言磁悬浮,亦作磁浮,是一种利用磁的吸力和排斥力来使物件在空中浮动,而不依靠其他外力的方法。
透过利用电磁力来对抗引力,可以使物件不受引力束缚,从而自由浮动。
磁悬浮技术的研究源于德国,早在1922年德国工程师赫尔曼·肯佩尔就提出了电磁悬浮原理,并于1934年申请了磁悬浮列车的专利。
1970年代以后,随着世界工业化国家经济实力的不断加强,为提高交通运输能力以适应其经济发展的需要,德国、日本、美国、加拿大、法国、英国等发达国家相继开始筹划进行磁悬浮运输系统的开发。
磁悬浮技术是集电磁学、电子技术、控制工程、信号处理、机械学、动力学为一体的典型的机电一体化技术(高新技术)。
磁悬浮轴承的稳定性分析及优化设计磁悬浮轴承是一种先进的轴承技术,利用磁力作用浮起轴与轴承之间的接触,实现无接触的支撑和传动。
它具有低摩擦、高精度、高速度等优点,在航天、机械、电力等领域得到广泛应用。
然而,磁悬浮轴承的稳定性问题一直是研究的焦点。
本文将对磁悬浮轴承的稳定性进行分析,并提出优化设计的方法。
在磁悬浮轴承中,稳定性是一个至关重要的问题。
任何轴承系统都需要保持稳定的运行,以确保轴的平稳旋转。
对于磁悬浮轴承而言,稳定性问题更加突出,因为磁力是通过电磁线圈产生的,存在一定的不确定性和波动性。
首先,我们来分析磁悬浮轴承的稳定性问题。
磁悬浮轴承的稳定性主要受到以下几个因素影响:控制系统的稳定性、磁场不平衡和轴向力的干扰。
控制系统的稳定性是磁悬浮轴承稳定性的基础,它直接影响轴承的力与位移的关系。
若控制系统不稳定,会导致轴承力的不稳定,进而影响轴的稳定旋转。
磁场不平衡主要是指轴承线圈间的磁场不均匀,这会导致磁悬浮力的不稳定性。
轴向力的干扰是由于径向不均匀载荷或轴本身的质量不均匀引起的,它会使得轴承系统产生非线性力,从而影响系统的稳定性。
为了优化磁悬浮轴承的稳定性,我们可以采取以下方法。
首先,改进控制系统的稳定性。
可以采用现代控制理论中的自适应控制、模糊控制或神经网络控制等方法,提升控制系统的鲁棒性和自适应性,以应对复杂的工况变化和外部干扰。
其次,优化磁场分布。
通过优化磁悬浮轴承的结构设计和磁场控制算法,确保磁场分布均匀,减小磁场不平衡带来的影响。
最后,考虑轴向力的干扰。
可以通过轴向力的预测和补偿来消除其对系统稳定性的影响,例如使用力传感器和补偿机构进行实时测量和控制。
除了以上方法,我们还可以利用仿真技术对磁悬浮轴承的稳定性进行分析和优化设计。
通过建立准确的数学模型和计算模拟,可以预测系统的动态响应和稳定性。
基于仿真结果,可以进一步改进系统的设计参数和控制策略,以实现更好的稳定性性能。
总结起来,磁悬浮轴承的稳定性是研究的热点和难点之一。

1前言1.1 高速切削简介高速切削的概念被提出后,经过了长期探索研究与发展后,才在近十几年被广泛应用在机械加工过程中。
高速切削作为一种新兴的先进机械加工技术,与传统的机械加工技术相比,其具有一系列的优点。
它集高效率、高加工精度、低功耗等于一体。
高速切削解决了常规切削加工中一些长期存在而无法解决的问题,例如由于机械加工过程中,刀具的切削量很小,产生的切削热比较少并且绝大部分切削热被切屑及时带走,从而提高了刀具的切削寿命;随着切削速度的提高,在单位时间内被加工材料的去除率有了很大的提高,进而减少了切削时间,提高了工件的加工效率;高速切削的进给量小,因而切削力也就相对要小,而且形成的切屑能够在很短的时间内被排出,切削过程所产生的热量在还没有传导至刀具时,就被切屑带走了,这样就降低了刀具及工件上的切削热;由于高速切削可以达到很高的加工精度,所以在某些场合可以实现以车代铣、以铣代磨等工序。
这些优点极大地缩短了产品的制造周期,这在竞争日益激烈的当代是很有发展前途的。
1.2 磁悬浮轴承简介磁悬浮轴承也被人们称为磁力轴承,它是一种靠磁场力来承受载荷或将转子悬浮起来的一种新型的支承形式,根据不同的工作原理可将磁悬浮轴承系统分为三大类:主动磁悬浮轴承、被动磁悬浮轴承和混合式磁悬浮轴承。
主动磁悬浮轴承是利用可控电磁力来悬浮主轴转子的,它有主动电子控制系统;被动磁悬浮轴承是利用磁场本身的特性使主轴转子悬浮,它没有主动电子控制系统,其应用最多的是永磁轴承;混合式磁悬浮轴承是由主动磁悬浮轴承和被动磁悬浮轴承以及其他一些必要的辅助支撑共同组合而成的,它既有主动磁轴承的优点也有被动磁轴承的优点。
为了便于设计制造,本设计中采用主动磁悬浮轴承磁悬浮轴承具有一系列的优点:定子与转子之间无接触,因而无摩擦,且功耗低,可以使主轴实现高速旋转;无需润滑和密封,因而可以简化系统结构的设计;支撑精度比一般的接触式轴承还高,工作稳定可靠。
但是,其支撑刚度比接触式轴承要低,而且结构复杂,需要专门的控制系统,主轴上还要设计增加位移传感器,成本较高。
磁悬浮轴承的控制与优化设计磁悬浮轴承作为现代机械工程领域的一项重要技术,具有许多独特的优势。
其悬浮部分完全无接触,没有摩擦产生的热损失,减小了能耗和维护成本。
此外,磁悬浮轴承还能实现快速、精确的轴向位置控制和旋转速度控制,为高速机械系统提供了更好的运动精度和可靠性。
本文将探讨磁悬浮轴承的控制与优化设计。
磁悬浮轴承的控制主要包括控制方法和控制系统的设计。
常用的磁悬浮轴承控制方法有自由控制和主动控制两种。
自由控制是指利用磁悬浮轴承自身的特性来实现稳定悬浮的控制方式。
主动控制则需要利用传感器和反馈控制系统来实现对悬浮部分的控制。
在实际应用中,主动控制更为常见,因为它可以提供更高的控制精度和灵活性。
控制系统的设计是磁悬浮轴承控制的关键。
一般来说,控制系统包括传感器、控制器和电磁部分。
传感器用于测量被控对象的状态,例如轴的位置、速度和振动等。
控制器根据传感器的反馈信息计算出控制信号,用来调节电磁部分的工作状态。
电磁部分则产生磁力,实现对轴的悬浮和运动的控制。
磁悬浮轴承的优化设计可以从多个方面入手。
首先,需要考虑磁悬浮轴承的结构设计。
轴承的结构应该符合被悬浮物体的运动需求,同时减小系统的质量和能耗。
其次,还可以优化控制算法。
随着控制算法的不断改进,磁悬浮轴承的控制性能得以提升。
例如,采用模糊控制、神经网络控制和自适应控制等先进算法,可以实现更高精度的控制。
此外,还可以考虑优化磁悬浮轴承的能量转换效率,以提高系统的整体效能。
针对磁悬浮轴承的控制和优化设计问题,研究者们进行了大量的工作。
例如,一些研究人员提出了基于自适应滑模控制器的磁悬浮轴承控制方法,通过在线调节控制器的参数,实现了对不同工况下的控制性能的优化。
还有一些研究者提出了基于遗传算法的优化设计方法,通过对磁悬浮轴承结构参数进行优化,提高了系统的性能指标。
这些研究工作为磁悬浮轴承的控制和优化设计提供了有益的参考。
总之,磁悬浮轴承的控制与优化设计是实现高速、精密运动的关键环节。
磁悬浮电机的设计与实现引言磁悬浮电机是一种基于磁悬浮技术和电动机原理相结合的先进电机。
与传统的机械轴承支撑电机不同,磁悬浮电机利用磁力使转子浮在空中,消除了摩擦损耗和机械磨损,从而提高了电机的效率和可靠性。
本文将介绍磁悬浮电机的设计原理和实现方法。
设计原理磁悬浮电机的设计原理基于磁力平衡和电力驱动。
首先,通过使用永磁体和电磁体产生的磁场相互作用,可以使转子悬浮在气隙中。
然后,通过改变电磁体的电流来调节磁场的强度,从而控制转子的位置。
最后,通过施加交变电流使转子旋转,实现电机的工作。
磁悬浮电机通常采用两种磁悬浮方式:永磁悬浮和电磁悬浮。
永磁悬浮电机通过使用稳定的永磁体来产生悬浮力,从而实现转子的悬浮和驱动。
电磁悬浮电机则通过使用电磁体来产生悬浮力,需要外部电源来提供悬浮力。
两种方式各有优点和适用范围,具体选择应根据实际应用需求进行。
设计步骤1. 确定设计要求在开始设计磁悬浮电机之前,需要确定设计要求,包括功率、转速范围、悬浮方式等。
这些要求将直接影响到电机的设计参数和性能。
2. 选取磁悬浮方式根据设计要求和应用需求,选择适合的磁悬浮方式。
永磁悬浮适用于小功率和高速应用,电磁悬浮适用于大功率和低速应用。
3. 选择磁悬浮材料根据悬浮方式选择合适的磁悬浮材料。
永磁悬浮电机通常采用永磁体材料,如永磁铁、钕铁硼等。
电磁悬浮电机可以选择软磁材料,如硅钢片等。
4. 设计磁悬浮系统设计磁悬浮系统包括磁悬浮轴承和磁悬浮电磁体。
根据转子的重量和转速范围,选择合适的磁悬浮轴承类型,如径向磁悬浮轴承、轴向磁悬浮轴承等。
设计磁悬浮电磁体时,需要考虑电磁体的尺寸、线圈参数等。
5. 设计控制系统设计控制系统是磁悬浮电机设计的关键。
控制系统需要实时监测转子位置和速度,并根据要求调整电磁体的电流,实现转子的悬浮和驱动。
常用的控制策略包括PID控制、模糊控制、自适应控制等。
6. 制造和调试在完成设计后,进行磁悬浮电机的制造和调试。
制造过程包括制造磁悬浮轴承、制造电磁体、组装电机等。
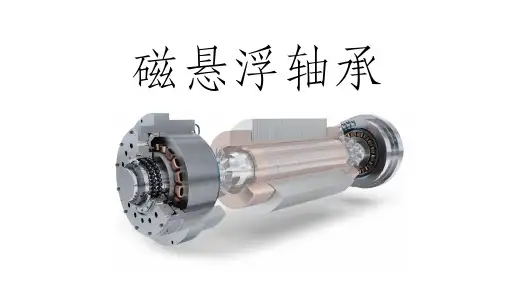
新型磁悬浮陀螺飞轮驱动电机与磁轴承控制系统设计传统机械飞轮由于定转子之间存在接触,有摩擦力大、功耗高、寿命短和噪声大缺点。
磁悬浮飞轮克服了传统机械飞轮缺点,还具有主动振动控制和振动抑制的优势。
磁悬浮框架飞轮通过偏转磁轴承迫使高速转子偏转,改变转子转速方向,输出瞬间大力矩,驱动航天器平台快速机动。
新型磁悬浮陀螺飞轮同时具备框架飞轮的大控制力矩输出和姿态敏感功能,即能利用偏转磁轴承迫使高速转子进动,输出大力矩,也可通过偏转磁轴承补偿干扰力矩,敏感航天器姿态。
新型磁悬浮陀螺飞轮的驱动电机和磁轴承的控制系统是其高精度力矩输出和姿态敏感的保障,控制器的优劣将直接影响到新型磁悬浮陀螺飞轮的运行状态。
本文以新型磁悬浮陀螺飞轮为研究对象,对新型磁悬浮陀螺飞轮的驱动电机和磁轴承控制系统进行了设计,从以下四个方面进行了深入研究。
(1)介绍了新型磁悬浮陀螺飞轮的总体结构,新型磁悬浮陀螺飞轮的结构对于搭建的控制系统性能好坏有很大的影响。
磁轴承和驱动电机作为被控对象,对其进行了详细的介绍,说明了其工作原理,建立了控制模型,为其高精度驱动做了铺垫。
(2)针对新型磁悬浮陀螺飞轮高精度转速控制的要求,对飞轮电机进行了分析,得到了转速误差的两个主要来源:一是电机本体结构,二是电机换相。
重点对本体结构导致的误差进行了分析,提出了基于磁场测量的磁钢修正方案,设计了基于霍尔原理的磁场均匀性测量装置。
最后,在搭建的装置上进行了磁场测量实验,实验证明:该装置能够对磁场均匀性进行测量,对电机磁钢装配具有很好的参考作用,提高驱动电机转速精度。
(3)针对高速驱动电机调速范围广、精度要求高的特点,提出了基于模糊自适应PI控制器的转速调节算法。
以新型磁悬浮陀螺飞轮驱动电机为对象,设计了一套以DSP为控制核心的电机驱动器,完成了驱动器的原理图设计和PCB布线。
最后,编写了电机转速控制代码,并在设计的驱动器上实现了速度调节,通过对采集的霍尔信号和反电动势的波形进行分析,结果表明,该驱动器和算法可较好的实现电机转速控制。
1前言1.1 高速切削简介高速切削的概念被提出后,经过了长期探索研究与发展后,才在近十几年被广泛应用在机械加工过程中。
高速切削作为一种新兴的先进机械加工技术,与传统的机械加工技术相比,其具有一系列的优点。
它集高效率、高加工精度、低功耗等于一体。
高速切削解决了常规切削加工中一些长期存在而无法解决的问题,例如由于机械加工过程中,刀具的切削量很小,产生的切削热比较少并且绝大部分切削热被切屑及时带走,从而提高了刀具的切削寿命;随着切削速度的提高,在单位时间内被加工材料的去除率有了很大的提高,进而减少了切削时间,提高了工件的加工效率;高速切削的进给量小,因而切削力也就相对要小,而且形成的切屑能够在很短的时间内被排出,切削过程所产生的热量在还没有传导至刀具时,就被切屑带走了,这样就降低了刀具及工件上的切削热;由于高速切削可以达到很高的加工精度,所以在某些场合可以实现以车代铣、以铣代磨等工序。
这些优点极大地缩短了产品的制造周期,这在竞争日益激烈的当代是很有发展前途的。
1.2 磁悬浮轴承简介磁悬浮轴承也被人们称为磁力轴承,它是一种靠磁场力来承受载荷或将转子悬浮起来的一种新型的支承形式,根据不同的工作原理可将磁悬浮轴承系统分为三大类:主动磁悬浮轴承、被动磁悬浮轴承和混合式磁悬浮轴承。
主动磁悬浮轴承是利用可控电磁力来悬浮主轴转子的,它有主动电子控制系统;被动磁悬浮轴承是利用磁场本身的特性使主轴转子悬浮,它没有主动电子控制系统,其应用最多的是永磁轴承;混合式磁悬浮轴承是由主动磁悬浮轴承和被动磁悬浮轴承以及其他一些必要的辅助支撑共同组合而成的,它既有主动磁轴承的优点也有被动磁轴承的优点。
为了便于设计制造,本设计中采用主动磁悬浮轴承磁悬浮轴承具有一系列的优点:定子与转子之间无接触,因而无摩擦,且功耗低,可以使主轴实现高速旋转;无需润滑和密封,因而可以简化系统结构的设计;支撑精度比一般的接触式轴承还高,工作稳定可靠。
但是,其支撑刚度比接触式轴承要低,而且结构复杂,需要专门的控制系统,主轴上还要设计增加位移传感器,成本较高。
磁共振梯度功率放大器原理一、工作原理磁共振梯度功率放大器是磁共振成像系统中的关键组件之一,其主要作用是为磁共振成像提供必要的梯度磁场。
该组件利用了磁共振原理和电磁场理论,通过控制和调整电流和磁场,实现成像过程中的空间定位和信号编码。
二、电路设计磁共振梯度功率放大器的电路设计主要包括输入电路、输出电路和保护电路等部分。
输入电路负责将外部输入的信号进行适当的调整和处理,以适应后续的放大和处理过程;输出电路则负责将放大后的梯度磁场信号输出,以实现对磁共振信号的调制;保护电路则用于防止设备过热或过流,保证设备的稳定性和安全性。
三、磁场梯度生成磁共振梯度功率放大器通过控制电流的流向和强度,生成所需的磁场梯度。
这些磁场梯度可以对磁共振信号进行空间定位和编码,从而实现成像过程中的空间分辨率和信号分离。
在设计中,需要综合考虑磁场梯度的精度、稳定性和动态范围等因素,以确保成像质量。
四、功率放大技术磁共振梯度功率放大器需要具备高功率和高效率的特性,以满足磁共振成像系统的需求。
目前常见的功率放大技术包括线性放大和非线性放大两种。
线性放大具有高精度和高稳定性的特点,但效率较低;非线性放大则具有高效率和可调节性的优点,但在精度和稳定性方面可能存在一定的问题。
在实际应用中,需要根据具体需求选择合适的放大技术。
五、效率与稳定性磁共振梯度功率放大器的效率和稳定性对其性能和应用至关重要。
高效率可以提高设备的运行效率和减少能耗,从而提高经济效益;而高稳定性则可以保证设备的可靠性和稳定性,提高成像质量。
因此,在设计和制造过程中,需要充分考虑这两个因素,并采取相应的措施进行优化和控制。
六、应用范围磁共振梯度功率放大器在磁共振成像领域有着广泛的应用。
它可以用于医学诊断、生物科学研究、材料无损检测等多个领域。
其优势在于可以对软组织进行高分辨率的成像,为医疗和科研提供了强有力的手段。
随着磁共振成像技术的发展和应用范围的扩大,对磁共振梯度功率放大器的性能要求也不断提高,未来市场仍有一定发展空间。
重载磁悬浮轴承电控系统的研究程炜超;谢振宇;张云聪;郝建胜【摘要】针对大型高速旋转机械中磁悬浮轴承电磁力小和响应(电流响应和电磁力响应)速度较慢等问题,采用了IGBT器件作为功率器件,研究了变换器的拓扑结构及其控制方法,设计制作了高电压大电流功率放大器和电压可调高频开关功率电源.将设计制作的功率放大器和开关功率电源,与实验室已有的传感器和数字控制器相结合,搭建了重载磁悬浮轴承电控系统,并将其应用于磁悬浮飞轮转子试验台进行了试验.试验及研究结果表明:重载磁悬浮轴承电控系统的最大输出电流为120 A,最大输出电压为450 V,大大提高了磁悬浮轴承的电磁力和响应速度,并且其能够保证飞轮转子在工作转速范围内稳定运行.【期刊名称】《机电工程》【年(卷),期】2019(036)006【总页数】6页(P562-567)【关键词】功率放大器;IGBT;开关电源;高频变压器;FPGA【作者】程炜超;谢振宇;张云聪;郝建胜【作者单位】南京航空航天大学机电学院,江苏南京210016;南京航空航天大学机电学院,江苏南京210016;南京航空航天大学机电学院,江苏南京210016;南京航空航天大学机电学院,江苏南京210016【正文语种】中文【中图分类】TH133.3;TH39;TM1330 引言当前,旋转机械正向高速、重载和细长方向发展。
磁悬浮轴承具有无接触、高转速和主动控制等优点,因而得到了广泛应用[1]。
一般磁悬浮轴承电控系统包括传感器、控制器、功率放大器和线性功率电源等。
单自由度磁悬浮轴承转子系统的工作原理是:首先,传感器检测转子的位移,并将位移信号转化为电压信号;其次,控制器接受上述电压信号,与预定位置的参考值做比较得出偏差,并按照相应的控制策略对偏差进行处理,得到控制信号的输出;最后,功率放大器接受控制信号,并根据该信号调整磁悬浮轴承线圈上的电流大小,以改变电磁铁A和B的吸力,从而改变转子偏离平衡位置的趋势,保证其稳定悬浮[2]。