永磁偏置径向轴向磁悬浮轴承工作原理和参数设计
- 格式:pdf
- 大小:300.96 KB
- 文档页数:8
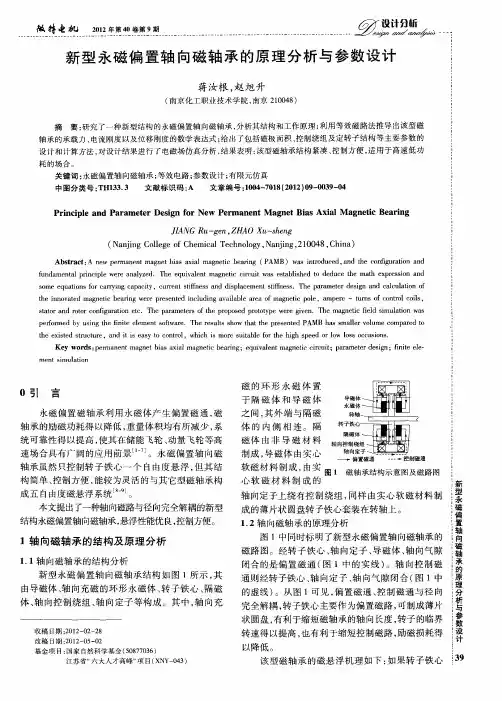
永磁偏置径向磁轴承的原理分析与参数设计赵旭升;邓智泉;汪波【摘要】为克服现有永磁偏置径向磁轴承的缺陷,研究了一种磁悬浮高速电动机用永磁偏置径向磁轴承,利用等效磁路法分析其结构及工作原理,得出了径向悬浮力的数学模型,并对数学模型进行了线性化处理,得出了其径向力-位移系数和力-电流系数。
给出了磁极面积、控制绕组、定转子结构等主要参数的设计方法,并制作了实验样机,对样机进行了三维有限元仿真分析和动静态悬浮实验。
理论研究和实验结果表明,该型磁轴承转子磁滞损耗小,结构紧凑,控制简单,悬浮性能良好,给出的参数设计方法合理。
%To overcome the defects of the present permanent magnet biased radial magnetic bearing(PRMB),a PRMB is studied to develope for the high speed magnetic suspending motor application.The configuration and fundamental principle of PRMB are analyzed.The equivalent magnetic circuit is established to deduce the mathematical model of the radial magnetic suspension force.The displacement stiffness and current stiffness are derived by linearizating the mathematical model.The parameter design of PRMB is presented including the area of magnetic pole,control windings,stator and rotor configuration etc.The parameters of the proposed prototype are given.The 3-D magnetic field simulation is performed,and the static experiment and dynamic experiment are accomplished.The theory analysis and the experiment results show that the rotor hysteresis loss of the presented PRMB is reduced,and it also has smaller volume compared to the existing structureand the control is easier.The levitation performance is well and the parameter design method is rational.【期刊名称】《电工技术学报》【年(卷),期】2011(026)011【总页数】8页(P127-134)【关键词】永磁偏置径向磁轴承;等效磁路;数学模型;参数设计;有限元仿真;实验【作者】赵旭升;邓智泉;汪波【作者单位】南京航空航天大学自动化学院,南京210016;南京化工职业技术学院自动控制系,南京210048;南京航空航天大学自动化学院,南京210016;南京航空航天大学自动化学院,南京210016【正文语种】中文【中图分类】TH133.31 引言伴随着现代航空业的发展需求,高速电动机以其体积小、重量轻等特点,在提升航空航天器的工作性能方面具有极其重要的意义,因而高速电动机的研究与发展迅速,同时民用工业领域对高速电动机的需求也日趋广泛[1-2],这也使磁轴承技术得到了广泛的应用,但作为高速电动机中的重要组成部分其需要具有体积小、功耗低的特点。
磁悬浮轴承原理磁悬浮轴承是一种高精度、高速度、无接触的轴承,具有很多优点,如低摩擦、低振动、长寿命等。
它主要由控制系统和轴承系统两部分组成,其中轴承系统是实现磁悬浮的关键部分。
本文将详细介绍磁悬浮轴承的原理及其构造。
一、磁悬浮原理1.1 磁力平衡原理磁悬浮轴承利用电磁力来支撑转子,使其不接触定子。
当转子偏离中心位置时,控制系统会根据传感器信号调整电流大小和方向,使得电磁力与重力平衡。
这种平衡状态下,转子可以在空气中自由旋转。
1.2 磁场产生原理为了实现磁力平衡,需要在定子和转子之间产生一个稳定的电磁场。
常用的方法是采用永久磁体和电枢线圈相互作用产生的永久磁场和交变电流产生的交变磁场叠加在一起形成稳定的磁场。
这种方法被称为永磁电磁混合悬浮。
1.3 磁悬浮轴承的分类根据磁场的产生方式,磁悬浮轴承可分为永磁电磁混合悬浮、全电磁悬浮和超导磁悬浮三种。
其中,永磁电磁混合悬浮是最常用的一种。
二、永磁电磁混合悬浮原理2.1 永久磁体产生稳定场在永久磁体的作用下,定子上形成一个稳定的永久磁场。
这个稳定的永久磁场可以提供一个方向和大小不变的参考系,使得转子在旋转时保持相对位置不变。
2.2 交变电流产生控制力在转子上装有线圈,当外加交变电流时,在线圈周围形成一个交变的电流场。
由于转子在这个交变电流场中运动,会感受到一个与线圈中电流方向相反的控制力。
通过调整交变电流方向和大小,可以实现对转子位置和运动状态的精确控制。
2.3 稳定性分析在理想情况下,永磁电磁混合悬浮可以实现完美的平衡和控制。
但实际上,由于永久磁体和线圈之间存在磁场耦合和温度漂移等因素,会导致系统的稳定性变差。
因此,在设计和制造过程中需要考虑这些因素,并采取相应的措施来提高系统的稳定性和可靠性。
三、磁悬浮轴承结构3.1 定子结构定子是支撑转子并产生稳定磁场的部件。
它通常由铜线圈、铁芯和永久磁体组成。
铜线圈通过外部电源供电,产生交变电流场;铁芯起到传导磁场和支撑转子的作用;永久磁体产生一个稳定的永久磁场。
磁悬浮轴承工作原理
磁悬浮轴承是一种利用磁力原理实现轴向支撑的设备。
它由固定磁极和浮动磁极组成,通过磁力的作用实现轴和轴承之间的无接触支撑。
具体工作原理如下:
1. 磁场产生:磁悬浮轴承中的固定磁极产生一个稳定的磁场,一般采用电磁线圈或永磁体来产生磁力。
2. 磁力感应:浮动磁极中的磁极感应到固定磁极的磁场,产生一个相同或相反的磁力。
3. 磁力平衡:浮动磁极中的磁力与重力或其它外力平衡。
通过控制电流或磁力调节电磁线圈或永磁体的强度,使得轴承浮在磁场中,与轴的接触力为零。
4. 控制系统:磁悬浮轴承通过传感器实时监测轴的位置和姿态,将信号传输给控制系统。
控制系统根据接收到的信号,调整电磁线圈或永磁体的磁力,使得轴承与轴的接触力保持在预定范围内。
5. 动力传输:当轴转动时,由于磁悬浮轴承与轴无直接接触,轴承可以无摩擦地支撑轴的转动,实现精确定位和高速转动。
总之,磁悬浮轴承利用磁力实现轴的支撑,具有无接触、无摩
擦、低噪音、高精度和高速等优点,广泛应用于高速机械设备、精密加工设备等领域。
轴向磁悬浮轴承工作原理
轴向磁悬浮轴承的工作原理是基于磁悬浮技术,它利用电磁力和
气体动压力来实现旋转轴的支撑和驱动,避免了机械轴承摩擦、磨损
等问题,从而提高了机械设备的运行效率和可靠性。
其具体工作原理可分为如下几个步骤:
第一步:磁悬浮原理
磁悬浮原理是指在磁场中,物体可以被悬浮或者限制在某一方向
上移动的现象。
磁悬浮轴承中,通过电磁线圈和永磁体产生磁场,使
得旋转轴的磁性部分受到磁悬浮力的作用,在离心力的控制下可以
“悬浮”在磁场中,实现了无接触的轴承。
第二步:气体动压原理
在磁悬浮轴承中,为了防止旋转轴产生晃动,需要在旋转轴与定
子之间保持一定的距离,并且要保证气体流经的稳定性。
因此,使用
气体动压原理,旋转轴与定子之间形成一定的气膜压力,保证了轴的
稳定运行。
第三步:位移传感器原理
为了保证轴承的稳定性和控制系统的精度,还需要使用位移传感
器来对旋转轴和定子之间的距离进行测量和控制。
通过反馈控制算法,可根据位移传感器的信号调整磁场和气压力,使得轴承保持在稳定的
状态,同时可以实现一定的轴向运动,从而满足不同工况的要求。
总之,轴向磁悬浮轴承工作原理是基于磁悬浮和气体动压技术,
通过电磁力和气体动压力的控制来实现旋转轴的支撑和运动。
它可以
提高机械设备的运行效率和可靠性,减少机械轴承维护和更换所带来
的成本和影响。
在现代工业领域中,轴向磁悬浮轴承已经得到了广泛
的应用和发展。

磁悬浮轴承的设计和控制随着科技的不断进步,磁悬浮轴承作为一种新型的轴承技术,逐渐引起了人们的关注。
它的出现不仅提升了机械设备的性能,还改变了传统轴承的运行方式。
本文将探讨磁悬浮轴承的设计原理和控制方法,以及与传统轴承相比的优势。
1. 磁悬浮轴承的设计原理磁悬浮轴承是通过电磁原理实现对轴的支承和稳定。
它由电磁悬浮部分和控制部分组成。
电磁悬浮部分包括固定部分和旋转部分,固定部分由电磁铁和轴承复合体组成,旋转部分则是装载在轴上的磁体。
通过控制电磁悬浮部分的电流,可以调节磁悬浮轴承与轴之间的力的大小和方向。
磁悬浮轴承的设计原理主要包括磁力支撑、磁力定位和磁力恢复三个方面。
磁力支撑是指通过向轴施加一个与重力相等且方向相反的力,使得轴悬浮在空中。
磁力定位则是通过调节支撑力的大小和方向,实现轴在水平方向上的位置控制。
磁力恢复是指通过控制轴与磁体之间的力,使得轴能够在受到外力作用后迅速恢复到平衡位置。
2. 磁悬浮轴承的控制方法磁悬浮轴承的控制方法主要分为闭环控制和开环控制两种。
闭环控制是通过给定轴的位置和速度信号,利用传感器和控制算法计算出合适的电流信号,控制电磁悬浮部分的电流大小和方向,从而实现轴的稳定运行。
开环控制则是通过预先设置电流信号,将其直接送至电磁悬浮部分,忽略轴的位置和速度变化,从而实现对轴的基本控制。
闭环控制是磁悬浮轴承常用的控制方法。
其主要包括位置控制和速度控制两个环节。
位置控制是通过传感器感知轴的位置,并与给定的位置信号进行比较,得出控制误差,然后根据控制算法计算出相应的电流信号。
速度控制是在位置控制的基础上,增加了速度传感器,通过对速度信号进行反馈和控制,实现对轴的更精确控制。
3. 磁悬浮轴承与传统轴承的比较与传统轴承相比,磁悬浮轴承具有许多优势。
首先,磁悬浮轴承没有机械接触,消除了传统轴承由于摩擦和磨损产生的问题,大幅提高了轴承的使用寿命。
其次,磁悬浮轴承具有低摩擦系数和高转速特性,减小了能量损耗和轴向受力,提高了机械设备的效率。
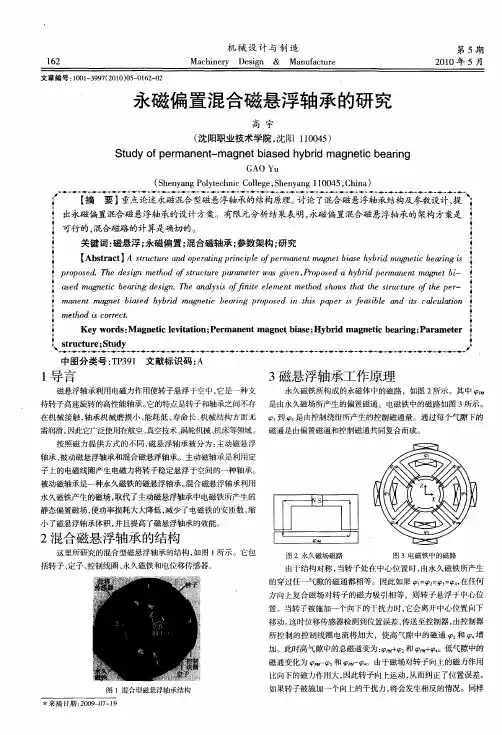
磁悬浮轴承原理磁悬浮轴承是一种利用电磁力来支撑旋转机械轴的高新技术轴承,它主要由定子和转子两部分组成。
磁悬浮轴承的工作原理是利用电磁力的斥力和吸力来支撑和控制转子的运动,从而实现对转子的非接触支撑和定位。
磁悬浮轴承具有无接触、无摩擦、无磨损、低振动、低噪音、高旋转精度等优点,因此在高速、超高速旋转机械领域有着广泛的应用。
磁悬浮轴承的工作原理主要包括电磁力支撑原理和控制原理两个方面。
首先,我们来看电磁力支撑原理。
磁悬浮轴承的定子上布置有多个电磁线圈,当这些线圈通电后,会产生磁场。
而转子上也安装有多个永磁体,当定子线圈通电后,产生的磁场与转子上的永磁体相互作用,从而产生斥力和吸力,支撑和控制转子的运动。
通过控制定子线圈的电流大小和方向,可以实现对转子的稳定支撑和定位。
其次,我们来看控制原理。
磁悬浮轴承的控制系统通常由传感器、控制器和执行器组成。
传感器用于检测转子的位置、速度和加速度等参数,将这些参数传输给控制器。
控制器根据传感器反馈的参数,通过对定子线圈的电流进行调节,实现对转子的稳定支撑和定位。
执行器则根据控制器的指令,控制定子线圈的电流大小和方向,从而实现对转子的精确控制。
总的来说,磁悬浮轴承的工作原理是利用电磁力的斥力和吸力来支撑和控制转子的运动,实现对转子的非接触支撑和定位。
通过精密的控制系统,可以实现对转子的稳定支撑和高精度定位,从而满足高速、超高速旋转机械对轴承的高要求。
综上所述,磁悬浮轴承的工作原理是一种先进的非接触式轴承技术,具有许多优点,对于高速、超高速旋转机械具有重要的应用价值。
随着科学技术的不断发展,相信磁悬浮轴承技术将会得到更广泛的应用和进一步的改进。
磁悬浮轴承工作原理(一)磁悬浮轴承工作原理什么是磁悬浮轴承?磁悬浮轴承是一种无接触、无摩擦的轴承,利用磁场来支撑和旋转轴件。
它能够有效减少摩擦损耗和机械磨损,提高设备的工作效率和寿命。
磁悬浮轴承的主要部件磁悬浮轴承由控制系统、传感器和磁场发生器构成。
控制系统控制系统是磁悬浮轴承的核心部件,负责控制磁场的强弱和方向,以保持轴承的稳定工作状态。
它根据传感器反馈的信号,实时调整磁场发生器的输出参数。
传感器传感器用于检测轴承的位移、速度和加速度等参数。
常用的传感器包括位移传感器、速度传感器和加速度传感器。
它们通过将物理量转化为电信号,传输给控制系统,进一步实现对磁场的调控。
磁场发生器磁场发生器产生磁场,用于对轴承进行支撑和悬浮。
常用的磁场发生器包括电磁铁和永磁体。
它们通过电流或永久磁铁的磁场作用,产生稳定的磁力,使轴承悬浮起来。
磁悬浮轴承的工作原理磁悬浮轴承的工作原理基于磁力的相互作用。
1.轴承主体悬浮:通过控制系统控制磁场发生器产生磁力,使轴承主体轻松悬浮在磁场中。
此时,轴承不会直接接触到任何实体表面,减少了摩擦损耗和能量消耗。
2.轴件定位:利用传感器检测轴件的位移,并传输给控制系统。
控制系统根据位移信号,通过调整磁场发生器的输出,将轴件定位在设定的位置上。
这样轴件的转动轴心始终与轴承主体重合,确保精准的旋转。
3.响应速度调节:传感器还能够检测轴件的速度和加速度等参数。
通过对速度信号的反馈控制,控制系统能够实时调节磁场的强弱,以适应工作状态的变化。
例如在负载突增时,控制系统可以迅速增大磁力,以防止轴件失去平衡。
磁悬浮轴承的应用领域磁悬浮轴承在许多领域得到了广泛应用,特别是在高速旋转机械和精密仪器中。
•高速轴承:磁悬浮轴承可以减少摩擦和磨损,实现高速旋转,提高机械效率。
•高精度测量仪器:磁悬浮轴承能够提供精确的轴心定位,保证测量结果的准确性。
•磁浮列车:磁悬浮轴承可用于实现列车的悬浮和推动,有效减少摩擦阻力,提高运行速度。
磁悬浮轴承设计方法磁悬浮轴承是一种新型的轴承,它采用了磁力悬浮技术,实现了轴承与转子之间的无接触运转。
相比传统的机械轴承,磁悬浮轴承具有更高的精度、更长的使用寿命和更低的摩擦损失。
因此,在高速旋转设备、超导磁体等领域得到广泛应用。
本文将介绍磁悬浮轴承设计方法。
一、磁悬浮轴承基本原理1. 磁力平衡原理磁悬浮轴承采用电磁铁产生强大的磁场,使得转子在空气中自由运动,因此必须保持稳定的平衡状态。
当转子偏离中心位置时,控制系统会通过调节电流来调整电磁铁产生的力,使得转子回到平衡位置。
2. 控制原理控制系统是磁悬浮轴承最重要的组成部分之一。
它通过传感器感知转子偏离中心位置的情况,并通过计算机算法来调整电流大小和方向,以达到稳定平衡状态。
控制系统的设计需要考虑转子质量、磁力大小、传感器精度等因素。
二、磁悬浮轴承设计步骤1. 确定轴承类型磁悬浮轴承可以分为永磁悬浮轴承和电磁悬浮轴承两种类型。
永磁悬浮轴承是利用永久磁铁产生的稳定磁场来支撑转子,具有结构简单、稳定性高等优点;电磁悬浮轴承则是通过电流产生的强大磁场来支撑转子,具有可调性强等特点。
根据实际需求选择合适的类型。
2. 确定材料和尺寸磁悬浮轴承的材料和尺寸直接影响其性能和使用寿命。
一般采用高强度、耐腐蚀、耐高温的材料制作,如不锈钢、钛合金等。
尺寸方面需要考虑转子质量、工作环境等因素。
3. 设计电路电路设计是控制系统中最重要的一环。
它需要根据实际情况选择合适的电源、传感器和控制器,并进行电路布局和调试。
在设计电路时需要注意安全性和稳定性,避免出现电路故障。
4. 安装调试安装和调试是磁悬浮轴承设计中最关键的环节。
它需要将轴承组件精确地安装在设备上,并通过仪器对控制系统进行调试,以达到最佳的工作状态。
在安装调试过程中需要注意安全性和精度要求。
5. 测试验证测试验证是磁悬浮轴承设计中最后一个环节。
它需要对轴承进行各种实验,如负载实验、高速旋转实验等,以验证其性能和可靠性。