stm32下485使用记录
- 格式:docx
- 大小:10.29 KB
- 文档页数:2
freertos 485指令Freertos485指令是一种用于串行通信的指令集,它基于自由RTOS(Real-TimeOperatingSystem)平台,适用于嵌入式系统的串行通信应用。
本篇文章将介绍Freertos485指令的分类、指令含义以及如何使用它们。
一、指令分类Freertos485指令主要分为以下几个类别:1.数据传输指令:包括发送数据和接收数据指令,用于在主设备和从设备之间传输数据。
2.控制指令:包括初始化设备、设置波特率、停止传输等控制操作指令。
3.状态查询指令:用于查询设备状态,例如设备是否在线、是否可以接收数据等。
二、指令含义以下是一些常用的Freertos485指令及其含义:1.SET_SERIAL_PORT:设置串行端口,指定要使用的串行端口号和波特率。
2.READ_DATA:从串行端口读取数据,返回接收到的数据。
3.WRITE_DATA:向串行端口发送数据,指定要发送的数据和发送的数据长度。
4.INIT_DEVICE:初始化设备,包括设置设备参数和启动设备。
5.STATUS_QUERY:查询设备状态,返回设备的在线状态和其他相关信息。
三、使用方法在使用Freertos485指令时,需要按照以下步骤进行操作:1.初始化串行端口,设置波特率和串行端口号。
2.使用控制指令初始化设备或设置设备参数。
3.使用状态查询指令查询设备状态,确保设备在线并可进行通信。
4.使用数据传输指令发送或接收数据,根据需要重复发送和接收数据。
5.在完成通信后,关闭串行端口并释放资源。
下面是一个简单的示例代码,演示如何使用Freertos485指令进行串行通信:```c//初始化串行端口和设备参数SET_SERIAL_PORT(SERIAL_PORT_1,9600);INIT_DEVICE();//发送数据WRITE_DATA(DATA_TO_SEND);//接收数据并处理接收到的数据READ_DATA(RECEIVED_DATA);//处理接收到的数据...//关闭串行端口和释放资源CLOSE_SERIAL_PORT();```需要注意的是,上述代码仅为示例,实际应用中需要根据具体情况进行修改和完善。
标签:modbus8051源程序modbus协议--51端程序的实现RTU需要一个定时器来判断3.5个流逝时间。
#define ENABLE 1#define DISABLE 0#define TRUE 1#define FAULT 0#define RECEIVE_EN 0#define TRANSFER_EN 1#define MAX_RXBUF 0x20extern unsigned char emissivity;extern unsigned char tx_count,txbuf[15];extern unsigned char rx_count,rxbuf[15];extern unsigned char tx_number,rx_number;extern bit rx_ok;unsigned char rx_temp;void InitTimer1() //针对标准8051{TMOD=(TMOD|0xf0)&0x1f; //将T1设为16位定时器TF1=0;TH1=0x62; //设T1位3.5位的接收时间35bit/9600bit/s=3.646msTL1=0x80;//晶振为11.0592MHz,T=65535-3.646ms*11.0592MHz/12=0xf2df//0x6280是22.1184M下LPC9XX下的值。
ET1=1;//允许T1中断TR1=1;//T1开始计数}void timer1() interrupt 3 using 2 //定时器中断{TH1=0x62; //3.646ms interruptTL1=0x80;if(rx_count>=5) //超时后,若接收缓冲区有数则判断为收到一帧{rx_ok=TRUE;}}void scomm() interrupt 4 using 3 //modbus RTU模式{if(TI){TI = 0;if(tx_count < tx_number) //是否发送结束{SBUF = txbuf[tx_count];}tx_count++;}if(RI){rx_temp=SBUF;if(rx_ok==FAULT) //已接收到一帧数据,在未处理之前收到的数舍弃{if(rx_countrxbuf[rx_count]=rx_temp;rx_count++;}TH1=0x62; //timer1 reset,count againTL1=0x80;RI=0;}}在主循环中判断标志rx_ok来执行帧处理。
发个STM32的MODBUS主节点程序由于课题的原因被强迫用了STM32(本来打算2440的),因此认识阿莫电子,看到了版上一众高手,并学了不少知识。
在课题中很多芯片资料的细节都是来源于阿莫电子,快毕业了,潜水了太久,就分享一点STM32的程序,反正很多都是从坛子里学的,我只是整理下拿来用了,献丑了。
处理器STM32F103ZET6是买论坛上一摄像头大师的(感谢免费帮我修了次3232),软件用的KEIL3.5。
我的MODBUS是驱动变频器的,做主节点用,主要实现03功能号和06功能号。
#define RS485Read (GPIO_WriteBit(GPIOG, GPIO_Pin_13,Bit_RESET))#define RS485Write (GPIO_WriteBit(GPIOG, GPIO_Pin_13,Bit_SET))//MODBUS的06功能号,读多个寄存器void ReadInverter(UINT16 Addr,UINT8 N,UINT16 *Values){UINT8 i,l;UINT16 tmp;UINT16 *p;//在发送缓冲里面填数据Inverter.SendBuf[0]=InverterAddr;Inverter.SendBuf[1]=ReadID;Inverter.SendBuf[2]=Addr>>8;Inverter.SendBuf[3]=Addr&0XFF;Inverter.SendBuf[4]=0;Inverter.SendBuf[5]=N;//计算CRC16,填入发送缓冲尾CalCRC(Inverter.SendBuf,6,Inverter.SendBuf+6);//置RS485发送状态RS485Write();//发送数据缓冲Uart_Send(InverterUart,Inverter.SendBuf,8);//清发送缓冲PurgeRecvBuf();m=LISTENING;//关定时器TIM5TIM_Cmd(TIM5, DISABLE);USART_ITConfig(InverterUart,USART_IT_RXNE,ENABLE);RS485Read();Delay(200,m);//既定延时400ms,若m的值变化则退出ResetInverterComm();m=TIME_OUT;//接收缓冲中数据长度为0,则表示超时无应答if(Inverter.Length==0){Inverter.Error=TIME_OUT; //("变频器应答超时");return ;}m=FINISHED;//长度校验if(Inverter.RecvBuf[2]!=Inverter.Length-5){Inverter.Error=FrameErr;return ;//("变频器数据长度错误");}CalCRC(Inverter.RecvBuf,Inverter.Length-2,CRC16);//CRC校验if(*(UINT16 *)(CRC16)!=*(UINT16 *)(Inverter.RecvBuf+Inverter.Length-2)) {Inverter.Error=CheckErr;return ;//("变频器校验错误");}else if(Inverter.RecvBuf[1]==ReadID+0X80){//("变频器读错误,错误号在第三个字节");switch(Inverter.RecvBuf[2]){case Invalid_Func:i =Invalid_Func; break;case Invalid_Addr:i =Invalid_Addr; break;case Invalid_Data:i =Invalid_Data; break;case InverterErr :i =InverterErr ; break;case InverterBusy:i =InverterBusy; break;case CheckErr :i =CheckErr ; break;default :i =UnknowErr ; break;}Inverter.Error=i;return ;}//校验一切正常,变频器操作成功else if(Inverter.RecvBuf[1]==ReadID){l=Inverter.RecvBuf[2]+3;p=(UINT16 *)Values;//接收数据for(i=3;i<l;i+=2){tmp=Inverter.RecvBuf[i];tmp=tmp<<8;tmp=tmp+Inverter.RecvBuf[i+1];*p=tmp;p++;}Inverter.Error=MODBUS_OK;//("读入参数成功:");return ;}//校验一切正常,变频器操作失败else if(Inverter.RecvBuf[1]!=ReadID&&Inverter.RecvBuf[1]!=ReadID+0X80) {Inverter.Error=UnknowErr;//("变频器应答错误");return ;}return ;}void TIM5_IRQHandler(void){if(TIM_GetITStatus(TIM5,TIM_IT_Update)!=RESET){TIM_ClearITPendingBit(TIM5, TIM_IT_Update);TIM_ClearFlag(TIM5, TIM_IT_Update);m=FINISHED;TIM_Cmd(TIM5, DISABLE);USART_ITConfig(InverterUart,USART_IT_RXNE,DISABLE);}}void USART3_IRQHandler(void){if(USART_GetITStatus(USART3, USART_IT_RXNE) != RESET){USART_ClearITPendingBit(USART3, USART_IT_RXNE);if(Inverter.Length<=17){Inverter.RecvBuf[Inverter.Length]=USART_ReceiveData(USART3);Inverter.Length++;}TIM_Cmd(TIM5, ENABLE);TIM_SetCounter(TIM5,0x0000);}}。
STM32开发板使用手册风帆 STM32开发板是风帆电子为初学者学习STM32 Cortex M3 系列ARM 而设计的学习板。
以STM32F103RCT6芯片为核心,配套寸彩色TFT屏模块,板载UART、USB、ADC电压调节、按键、JTAG接口、彩屏接口、流水灯、SD卡接口、IO引出口等多种硬件资源。
v1.0 可编辑可修改JTA2个LEDGPIOA引出1O USB 串口DS10B 20预HS0038红外接红外温度传感器连接GPIOB@C引出IO OLED@LCD 共用接口STM32F103寸LCD 接485芯片 RS485接口 1:A; 3:BNRF24L01W25Q16 FLASHSD 卡接口(在JF24C 模块预留GPIOC @D 引出IO蜂鸣器跳PS/2鼠标键盘三个按键: WAKEUPRESET按键Rs232电源开关 USB 接口 电源指自恢复保MAX232电源芯24c02、5V 电源输出; 线序为: GND/GND/5V BOOT 设置 线序为:GND /GND BOOT1/BOOT0此板子不管硬件还是软件完全无缝接兼容正点原子的MINSTM32,并对MINSTM32进行了完美的升级,让我们用最少的钱做更多的事,具体升级的部分包括:1、C PU的升级利用ST意法半导体的CPU兼容性强的优点,此板采用比STM32F103RBT6性能更强、且完全兼容的的STM32F103RCT6升级CPU,把完美的MINNI STM板子的功能发挥到极致,具体2个CPU的主要资源对比如下:可以看出,FLASH增加了一倍,达到256K,RAM也增加了1倍,让我们不用再为FLASH\RAM小而烦恼,使我们的存储空间更为强大;增加了一个16位普通IC/OC/PWM),2个16位基本(IC/OC/PWM),1个STI,2个USART,这里比STM32F103RB还多了一个DAC通道,这个STM32F103RB是没有的2、由于STM32F103RCT6有多达5个USART,因此在这个开发板上我们增加了个RS485芯片,我们可以进行485通信;3、STM32F103RCT6有多达5个USART,其中有3个支持7816协议,可以实现智能卡的设计,对于想学习、研究、设计智能一卡通的同学最好的选择;4、STM32F103RCT6比STM32F103RBT6多一个DAC通道,我们可以用杜邦线从我们的引出IO引脚上引出引脚,进行学习、设计。
STM32HAL库UART串⼝读写功能笔记串⼝发送功能:uint8_t TxData[10]= "01234abcde";HAL_UART_Transmit(&huart2,TxData,10,0xffff);//把TxData的内容通过uart2发送出去,长度是10,timeout的时间是最⼤值0xffff串⼝接收功能1:uint8_t value='F';HAL_UART_Receive(&huart2,(uint8_t *)&value,1,1000);//在这个语句停留1000ms内等待接收1个字节数据,把数据存放在value中串⼝接收功能2:HAL_UART_Receive_IT(&huart2,(uint8_t *)&value,1);//程序不会在这个语句停留,直接会按照中断⽅式把接收数据存放在value中,但是这个语句只能使能⼀次串⼝中断。
所以要在中断服务函数或者回调函数中重新使能串⼝接收功能3:if(HAL_UART_Receive_IT(&huart2,(uint8_t *)&value,1) != HAL_OK){ //这⼀句写在main函数的while(1)上⾯。
⽤于启动程序启动⼀次中断接收HAL_UART_Transmit(&huart2, (uint8_t *)&"ERROR\r\n",7,10);while(1);}void HAL_UART_RxCpltCallback(UART_HandleTypeDef *UartHandle){HAL_UART_Transmit(&huart2, (uint8_t *)&"\r\ninto HAL_UART_RxCpltCallback\r\n",32,0xffff); //验证进⼊这个函数了HAL_UART_Transmit(&huart2,(uint8_t *)&value,1,0xffff); //把接收到的数据通过串⼝发送出去HAL_UART_Receive_IT(&huart2,(uint8_t *)&value,1); //重新打开串⼝中断}串⼝DMA发送DMA的TX要这样设置uint8_t txData[] = {"HelloWorld\r\n"};HAL_UART_Transmit_DMA(&huart2,txData,sizeof(txData));//可以通过DMA把数据发出去DMA接收if(HAL_UART_Receive_DMA(&huart2, (uint8_t *)rxData, sizeof(rxData)-1) != HAL_OK)//main函数while(1)前,启动⼀次DMA接收{Error_Handler();}串⼝回调函数:void HAL_UART_RxCpltCallback(UART_HandleTypeDef *UartHandle){uint8_t temp[] = {"\r\nin Callback\r\n"};HAL_UART_Transmit_DMA(&huart2,temp,sizeof(temp)-1);//可以通过DMA把数据发出去HAL_UART_Receive_DMA(&huart2, (uint8_t *)rxData, sizeof(rxData)-1); //重新使能接收}main函数while(1)中不断输出rxData值HAL_UART_Transmit_DMA(&huart2,rxData,sizeof(rxData)-1);//可以通过DMA把数据发出去写在前⾯ 最近需要使⽤⼀款STM32L4系列的芯⽚进⾏开发,需要学习使⽤HAL库。
AN3070实现STM32下USART通信RS-485和IO-LINK驱动使能信号山西大学电子信息工程系王晓峰Wangxiaofeng@简介RS-485和IO-Link是半双工通信协议,此协议给工业网络提供了物理层简单的实现方法。
STM32F10X,包含了多达5个UART接口和快速DMA传输特性,以及低中断等待,满足RS-485和IO-Link时序特性。
此应用文档目的是提供驱动使能(DE)信号变换的时序大小测量方法,在RS-485和IO-Link的传输中,通过两种不同的方法来实现此信号。
此应用文档被组织为三部分。
●解释了为什么驱动使能信号的时序是决定性的。
●然后描述了两种实现DE信号的方法。
●最后,给出了测量DE信号切换时间的两种不同方法1DE信号时序约束对于串行半双工通信协议,比如RS-485和IO-Link,主设备需要生成一个直接信号去控制收发器(PHY)。
此信号通知PHY需要工作在发送或接受模式。
此控制信号的时序起决定性的作用,特别是当发送模式切换到接收模式,在数据被其他设备发送前,必须确信设备处于接收模式。
在一位时间内,主设备必须释放TX/RX线,否则将与从设备响应冲突。
所以DE信号必须在一位的时间内,从高切换到低,此切换跟随在主设备发送的最后一个字节的最后一位后面。
图1.DE时序主设备应该能保证DE信号时序(符合RS-485与IO-Link规范)。
DE信号由GPIO实现。
在本文档中,DE信号由GPIO的(PC6)实现,也可以由任何GPIO实现。
2实现DE信号的常见方法此部分目的是提供两种控制DE信号和USART收发模式切换的方法。
第一种方法是用了2路中断:DMA发送完成中断和USART发送完成中断。
第二种方法是用了2路USART中断:发送完成中断和发送缓冲区空中断。
2.1使用DMA中断的方法此方法中,DMA完全管理数据发送缓冲区。
它连续不断的发送数据缓冲到USART数据寄存器,直到DMA计数器达到0。
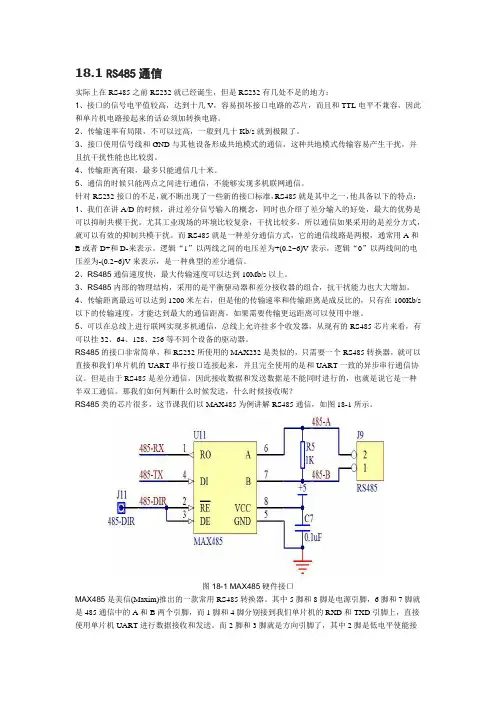
18.1 RS485通信实际上在RS485之前RS232就已经诞生,但是RS232有几处不足的地方:1、接口的信号电平值较高,达到十几V,容易损坏接口电路的芯片,而且和TTL电平不兼容,因此和单片机电路接起来的话必须加转换电路。
2、传输速率有局限,不可以过高,一般到几十Kb/s就到极限了。
3、接口使用信号线和GND与其他设备形成共地模式的通信,这种共地模式传输容易产生干扰,并且抗干扰性能也比较弱。
4、传输距离有限,最多只能通信几十米。
5、通信的时候只能两点之间进行通信,不能够实现多机联网通信。
针对RS232接口的不足,就不断出现了一些新的接口标准,RS485就是其中之一,他具备以下的特点:1、我们在讲A/D的时候,讲过差分信号输入的概念,同时也介绍了差分输入的好处,最大的优势是可以抑制共模干扰。
尤其工业现场的环境比较复杂,干扰比较多,所以通信如果采用的是差分方式,就可以有效的抑制共模干扰。
而RS485就是一种差分通信方式,它的通信线路是两根,通常用A和B或者D+和D-来表示。
逻辑“1”以两线之间的电压差为+(0.2~6)V表示,逻辑“0”以两线间的电压差为-(0.2~6)V来表示,是一种典型的差分通信。
2、RS485通信速度快,最大传输速度可以达到10Mb/s以上。
3、RS485内部的物理结构,采用的是平衡驱动器和差分接收器的组合,抗干扰能力也大大增加。
4、传输距离最远可以达到1200米左右,但是他的传输速率和传输距离是成反比的,只有在100Kb/s 以下的传输速度,才能达到最大的通信距离,如果需要传输更远距离可以使用中继。
5、可以在总线上进行联网实现多机通信,总线上允许挂多个收发器,从现有的RS485芯片来看,有可以挂32、64、128、256等不同个设备的驱动器。
RS485的接口非常简单,和RS232所使用的MAX232是类似的,只需要一个RS485转换器,就可以直接和我们单片机的UART串行接口连接起来,并且完全使用的是和UART一致的异步串行通信协议。
linux下485通讯c语言代码Linux下的485通讯C语言代码在嵌入式系统和工控领域中,485通讯是一种常见的串行通讯方式。
Linux作为一种常用的操作系统,也提供了相应的接口和工具来支持485通讯。
本文将介绍在Linux下使用C语言实现485通讯的代码。
在开始编写485通讯的C语言代码之前,我们需要先了解一些基本的概念和原理。
485通讯是一种半双工的串行通讯方式,它使用两根信号线进行数据的传输,一根用于发送数据(TX),一根用于接收数据(RX)。
通常情况下,485通讯使用的波特率较低,例如9600bps或者19200bps。
在Linux下,我们可以通过打开串口设备文件来实现485通讯。
串口设备文件的命名规则为/dev/ttySx,其中x表示串口的编号。
例如,/dev/ttyS0表示第一个串口设备,/dev/ttyS1表示第二个串口设备。
我们可以使用open函数来打开串口设备文件,并使用read 和write函数来进行数据的读写操作。
下面是一个简单的示例代码,演示了如何在Linux下使用C语言实现485通讯:```c#include <stdio.h>#include <stdlib.h>#include <string.h>#include <fcntl.h>#include <unistd.h>#include <termios.h>int main(){int fd;char data[10];// 打开串口设备文件fd = open("/dev/ttyS0", O_RDWR);if (fd == -1) {printf("无法打开串口设备文件\n");return -1;}// 配置串口参数struct termios options;tcgetattr(fd, &options);cfsetispeed(&options, B9600); // 设置波特率为9600bps cfsetospeed(&options, B9600);options.c_cflag |= CLOCAL | CREAD;options.c_cflag &= ~CSIZE;options.c_cflag |= CS8;options.c_cflag &= ~PARENB;options.c_cflag &= ~CSTOPB;tcsetattr(fd, TCSANOW, &options);// 发送数据strcpy(data, "Hello");write(fd, data, strlen(data));// 接收数据read(fd, data, sizeof(data));printf("接收到的数据:%s\n", data);// 关闭串口设备文件close(fd);return 0;}```上述代码首先通过open函数打开了/dev/ttyS0这个串口设备文件,如果打开失败,则会提示无法打开串口设备文件并退出。
STM32使用DMA加串口空闲中断接收数据在STM32中使用DMA和串口空闲中断接收数据可以实现高效的数据接收。
下面是一个示例代码,可以在1200字以上使用DMA和空闲中断接收数据。
首先,需要启用STM32的串口空闲中断和DMA功能。
在CubeMX中配置相关的引脚和串口设置,并使能空闲中断和DMA接收。
接下来是代码实现:```c#include "stm32f4xx_hal.h"#define UART_RX_BUFFER_SIZE 2048 // 接收缓冲区大小UART_HandleTypeDef huart2;DMA_HandleTypeDef hdma_usart2_rx;uint8_t uart_rx_buffer[UART_RX_BUFFER_SIZE];uint16_t uart_rx_index = 0;```上面的代码定义了串口接收的缓冲区和相关的变量。
```cvoid HAL_UART_IdleCallback(UART_HandleTypeDef *huart)if (huart->Instance == USART2)//空闲中断发生HAL_UART_DMAStop(&huart2);}```这是串口空闲中断回调函数,当串口空闲中断发生时,将设置一个标志表示接收完成,并停止DMA接收。
```cvoid HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)if (huart->Instance == USART2)//DMA接收完成uart_rx_index += UART_RX_BUFFER_SIZE -hdma_usart2_rx.Instance->CNDTR;if (uart_rx_index >= UART_RX_BUFFER_SIZE)//接收缓冲区满了,重置索引uart_rx_index = 0;}HAL_UART_Receive_DMA(&huart2, uart_rx_buffer,UART_RX_BUFFER_SIZE);}```这是DMA接收完成回调函数,当DMA接收完成时,更新接收缓冲区索引,并重新启动DMA接收。
stc15单片机写485通讯程序如何在STC15单片机上编写485通信程序引言:STC15单片机是一种常用的单片机芯片,具有低功耗、高性能等特点,在工业自动化领域得到了广泛应用。
其中,485通信是一种常用的通信方式,具有抗干扰能力强、传输距离远等优势。
本文将详细介绍如何在STC15单片机上编写485通信程序,帮助读者了解实际操作过程。
一、了解485通信协议在开始编写485通信程序之前,我们首先要了解485通信协议。
485通信协议是一种串口通信协议,它定义了通信设备之间的数据传输规则。
它使用两根线实现全双工的通信,其中A、B两线分别用于发送和接收数据。
在编写485通信程序时,我们需要掌握标准的485通信协议,包括帧结构、波特率、数据格式等内容。
二、准备开发环境在编写485通信程序之前,我们需要准备好相应的开发环境。
首先,我们需要一台电脑,并安装好STC15系列单片机的开发软件,例如Keil C51。
然后,我们需要准备一块STC15单片机开发板,以及一台支持485通信的外部设备,例如电机控制器、传感器等。
三、了解STC15单片机的485通信功能STC15单片机具有内置的硬件串口模块,可用于实现485通信功能。
我们需要了解STC15单片机的串口模块的工作原理和使用方法。
具体来说,我们需要了解串口的引脚定义、波特率设置、数据格式配置等内容。
四、编写485通信程序接下来,我们可以开始编写485通信程序了。
在Keil C51开发环境中,我们可以利用C语言来编写程序。
首先,我们需要定义相应的引脚,将STC15单片机的串口引脚与外部设备的485通信引脚连接起来。
然后,我们需要进行相应的配置,例如设置波特率、数据位数、停止位等。
最后,我们可以编写数据发送和接收的代码,实现数据的传输和处理。
在编写485通信程序时,需要注意以下几个关键点:1. 引脚定义:需要根据具体的开发板和外部设备,定义好STC15单片机的串口引脚。
在工业控制、电力通讯、智能仪表等领域,通常情况下是采用串口通信的方式进行数据交换。
最初采用的方式是 RS232 接口,由于工业现场比较复杂,各种电气设备会在环境中产生比较多的电磁干扰,会导致信号传输错误。
除此之外,RS232 接口只能实现点对点通信,不具备联网功能,最大传输距离也只能达到几十米,不能满足远距离通信要求。
而 RS485 则解决了这些问题,数据信号采用差分传输方式,可以有效的解决共模干扰问题,最大距离可以到1200 米,并且允许多个收发设备接到同一条总线上。
随着工业应用通信越来越多, 1979 年施耐德电气制定了一个用于工业现场的总线协议 Modbus 协议,现在工业中使用RS485 通信场合很多都采用 Modbus 协议,本节课我们要讲解一下 RS485 通信和Modbus 协议。
单单使用一块KST-51 开发板是不能够进行RS485 实验的,应很多同学的要求,把这节课作为扩展课程讲一下,如果要做本课相关实验,需要自行购买USB 转 485 通信模块。
18.1 RS485通信实际上在 RS485 之前 RS232 就已经诞生,但是RS232 有几处不足的地方:1、接口的信号电平值较高,达到十几V ,容易损坏接口电路的芯片,而且和TTL 电平不兼容,因此和单片机电路接起来的话必须加转换电路。
2、传输速率有局限,不可以过高,一般到几十Kb/s 就到极限了。
3、接口使用信号线和GND 与其他设备形成共地模式的通信,这种共地模式传输容易产生干扰,并且抗干扰性能也比较弱。
4、传输距离有限,最多只能通信几十米。
5、通信的时候只能两点之间进行通信,不能够实现多机联网通信。
针对 RS232 接口的不足,就不断出现了一些新的接口标准,RS485 就是其中之一,他具备以下的特点:1、我们在讲A/D 的时候,讲过差分信号输入的概念,同时也介绍了差分输入的好处,最大的优势是可以抑制共模干扰。
尤其工业现场的环境比较复杂,干扰比较多,所以通信如果采用的是差分方式,就可以有效的抑制共模干扰。
STM32使用DMA加串口空闲中断接收数据在STM32上使用DMA加串口空闲中断接收数据时,可以通过以下步骤实现:1.配置串口进行接收:-设置串口的波特率、数据位、停止位等参数;-使能串口的接收功能;-配置串口的空闲中断使能。
2.配置DMA进行接收:-设置DMA通道的传输方向为从外设到内存;-设置DMA的数据传输大小为字节;-设置DMA的外设地址为串口的数据寄存器地址;-设置DMA的内存地址为接收缓冲区的起始地址;-设置DMA的传输模式为循环传输,以实现连续接收;-使能DMA传输完成中断。
3.在空闲中断中处理接收到的数据:-在空闲中断服务函数中判断DMA传输是否完成;-如果传输完成,说明接收到了数据;-可以通过DMA的传输计数器获取到接收到的数据长度;-根据接收到的数据长度,可以在接收缓冲区中找到接收到的数据。
以下是一个示例代码,演示如何使用DMA加串口空闲中断接收数据:```c#include "stm32f4xx.h"#define BUFFER_SIZE 1024uint8_t rx_buffer[BUFFER_SIZE];volatile uint16_t rx_index = 0;void USART_Configuration(void)GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;DMA_InitTypeDef DMA_InitStructure;//使能USART1和DMA2时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_DMA2, ENABLE);//配置GPIOGPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 , GPIO_Pin_10; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_USART1);GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_USART1);//配置USARTUSART_ART_WordLength = USART_WordLength_8b;USART_ART_StopBits = USART_StopBits_1;USART_ART_Parity = USART_Parity_No;USART_ART_HardwareFlowControl =USART_HardwareFlowControl_None;USART_ART_Mode = USART_Mode_Rx ,USART_Mode_Tx;USART_Init(USART1, &USART_InitStructure);//配置DMADMA_DeInit(DMA2_Stream2);DMA_InitStructure.DMA_Channel = DMA_Channel_4;DMA_InitStructure.DMA_PeripheralBaseAddr =(uint32_t)&USART1->DR;DMA_InitStructure.DMA_Memory0BaseAddr = (uint32_t)rx_buffer;DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralToMemory;DMA_InitStructure.DMA_BufferSize = BUFFER_SIZE;DMA_InitStructure.DMA_PeripheralInc =DMA_PeripheralInc_Disable;DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;DMA_InitStructure.DMA_PeripheralDataSize =DMA_PeripheralDataSize_Byte;DMA_InitStructure.DMA_MemoryDataSize =DMA_MemoryDataSize_Byte;DMA_InitStructure.DMA_Mode = DMA_Mode_Circular;DMA_InitStructure.DMA_Priority = DMA_Priority_High;DMA_InitStructure.DMA_FIFOMode = DMA_FIFOMode_Disable;DMA_InitStructure.DMA_FIFOThreshold =DMA_FIFOThreshold_HalfFull;DMA_InitStructure.DMA_MemoryBurst = DMA_MemoryBurst_Single;DMA_InitStructure.DMA_PeripheralBurst =DMA_PeripheralBurst_Single;DMA_Init(DMA2_Stream2, &DMA_InitStructure);//配置DMA接收完成中断DMA_ITConfig(DMA2_Stream2, DMA_IT_TC, ENABLE);//配置空闲中断USART_ITConfig(USART1, USART_IT_IDLE, ENABLE);//使能USART和DMAUSART_Cmd(USART1, ENABLE);DMA_Cmd(DMA2_Stream2, ENABLE);//配置NVICNVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);void USART1_IRQHandler(void)if (USART_GetITStatus(USART1, USART_IT_IDLE) != RESET)//清除空闲中断标志USART_ReceiveData(USART1);//禁止DMA传输DMA_Cmd(DMA2_Stream2, DISABLE);//计算接收到的数据长度uint16_t length = BUFFER_SIZE -DMA_GetCurrDataCounter(DMA2_Stream2);//处理接收到的数据for (uint16_t i = 0; i < length; i++)// 处理rx_buffer[i]数据//...}//重启DMA传输DMA_SetCurrDataCounter(DMA2_Stream2, BUFFER_SIZE); DMA_Cmd(DMA2_Stream2, ENABLE);}int main(void)USART_Configuration(;while (1)//等待接收完成}//处理接收到的数据for (uint16_t i = 0; i < rx_index; i++)// 处理rx_buffer[i]数据//...}//重置接收状态rx_index = 0;}```请注意,代码中的波特率及其他配置可能需要根据您的实际需求进行修改。
STM32实验报告一、实验目的本次实验的目的是了解并掌握STM32单片机的基本使用方法,学习如何通过编程控制STM32来完成一系列操作,包括输入输出控制、定时器控制等。
二、实验器材和材料1.STM32单片机开发板B数据线3. 开发环境:Keil uVision 5(或其他适用于STM32的编程软件)三、实验过程1. 配置开发环境:安装Keil uVision 5,并将STM32单片机开发板与计算机连接。
2.创建一个新的工程,并选择适当的芯片型号。
3.对芯片进行配置:选择适合的时钟源,设置GPIO端口等。
4.编写程序代码:根据实验要求,编写相应的程序代码。
5. 编译程序:在Keil uVision中进行编译,生成可执行文件。
6.烧录程序:将生成的可执行文件烧录到STM32单片机中。
7.调试与测试:连接各种外设并进行测试,检查程序功能的正确性。
8.实验结果分析:根据测试结果,分析并总结实验结果。
四、实验结果在本次实验中,我成功完成了以下几个实验任务:1.输入输出控制:通过配置GPIO端口为输入或输出,我成功实现了对外部开关、LED 等外设的控制。
通过读取外部开关的状态,我能够进行相应的逻辑操作。
2.定时器控制:通过配置并启动定时器,我成功实现了定时中断的功能。
可以通过定时中断来触发一系列事件,比如定时更新数码管的显示,控制电机的运动等。
3.串口通信:通过配置UART串口模块,我成功实现了与计算机的串口通信。
可以通过串口与计算机进行数据的收发,实现STM32与计算机的数据交互。
五、实验总结通过本次实验,我对STM32单片机的使用方法有了更深入的了解。
学会了如何配置GPIO端口、定时器、串口等,掌握了相应的编程技巧。
此外,还学会了如何进行调试和测试,检查程序功能的正确性。
通过实验的实际操作,我对STM32的各项功能有了更深入的理解。
需要注意的是,在实验过程中,我遇到了一些问题,比如代码编写错误、烧录问题等,但经过仔细分析和调试,最终都得到了解决。
MEMOBUS通讯协议(485通讯)使用*****通讯功能使用*****通讯协议,能够与*****系列等可编程控制器进行串行通信。
接线说明通讯口RS-485/422R+R-S+S-G*****通信输入*****通信输出通信屏蔽线RS-485通讯为2线制,请短接R+和S+,R-和S-差动输入PHC绝缘差动输出PHC绝缘图1端子布局图2RS-485通讯接线相关参数参数NO.H7.01.H7.02.H7.03.H7.04.名称串行口通讯协议串行口通道号串行口设置RTS选择0:422通讯内容0:*****SHIFX2协议1:*****协议本机的通讯地址设定范围0,11~3100~FF出厂设定*****1:485通讯0,1设定通讯中断的保护方式:H7.05.通讯中断保护动作0:不保护2:减速停止H7.06.H7.07H7.08通讯中断保护时间发送等待时间自动写入EEPROM使能1:自由滑行停止3:非常减速停止4.仅警告0.1~25.0s2~65ms0,11.0s5ms00~4通讯中断的检测时间接收命令后到发送响应之间的延时时间写数据到参数区时是否写入EEPROM的选择0:不写入1:自动写入H7.09数据方向发送数据和地址的方向0:高位字节在前,1:低位字节在前0,10注1:串口设置字的定义:位*****6*****4*****2BIT1~BIT0使能位:0:失效1:生效1:有效验1:奇效验1:2位1:同步通讯2:*****3:*****定义数据长度:0:8位长度1:7位长度效验使能:0:无效验效验选择:0:偶效验停止位选择:0:1位通讯方式:0:异步通讯通讯波特率:0:*****:*****例如:H7.03=80,即设置串行口为9600,N,8,1BIT7BIT6BIT5BIT4BIT3BIT2BIT1BIT0***-*****通信规格以下表示*****通信规格。
项目接口同步方式RS-422,RS-485异步(起止同步)速率:可从9600/*****/*****/*****bps中选择通信参数数据长:8位固定检验:从偶/奇/无中选择停止位:1位固定通信协议可连接台数*****(只有RTU模式)最多31台(使用RS-485时)规格信号格式化*****通信是主控制器对驱动装置传送指令,驱动装置采取接收指令响应形式,下表为信号格式。
stm32下485使用记录
使用STM32 做为控制器,板上要求有4 个485 接口,一个232 接口,当
232 有数据到达时,按条件转发给485,当485 有数据到达时,无条件转给232
刚开始编写代码时,由于对485 使用不熟悉,不知道该注意哪些,就直接编写
程序:1.配置管脚,这里管脚配置232 与485 是一样的,但485 要用一个管脚
的高低电平控制输入输出方向,这里使用使用4 个管脚对串口2--串口4 控制2.
中断配置,每个串口给与打开对应的中断线,并给与一定的优先级3.串口配置,
这里包含时钟、波特率、8N1 等,并选择使用的中断事件,这里所有串口都选
用接收中断232 配置和485 配置是一样的,无非485 是半双工的,需要控制方
向,还有一个特别注意的地方,也是我记录这个文档的原因:由于硬件是我手
工制作,不确定所用串口都能使用,所以使用循环输出测试是否到pc 的串口
助手,测试结果发现程序一直会进入输入中断,没错是输入中断,发送数据进
入输入中断,后经仔细研究发现问题,代码如下:主函数int main(void){u8 cmd = 0xaa;//配置过程不写了while(1){serial3_putchar(cmd);}}串口接收中断我已
打开,这里不写了串口3 发送字节函数void Serial3PutChar(u8 c){int i;MAX485EN3(); //485 输出控制GPIO_SetBits(GPIOE, GPIO_Pin_15) USART_SendData(USART3, c);while (USART_GetFlagStatus(USART3, USART_FLAG_TC) == RESET);MAX485RE3(); //485 输入控制GPIO_ResetBits(GPIOE, GPIO_Pin_15)}串口中断服务子程序void USART3_IRQHandler(void){if(USART_GetITStatus(USART3, USART_IT_RXNE) != RESET){Serial1PutChar(Serial3GetChar()); //串口1 发送串口2 接收到的数据USART_ClearITPendingBit(USART2, USART_IT_RXNE);}}后来经过本人查找
资料及反复思量,发现问题是485 发送数据的时间不够,后经修改波特率为。