全局快门和卷帘式快门
- 格式:doc
- 大小:34.00 KB
- 文档页数:1
工业相机的主要性能特点一、图像感光芯片以前工业相机都使用CCD芯片, 这使得相机具有高灵敏度和低图像噪声。
此外,CCD 工业相机还具有以下三个主要特征:1、全局快门;2、黑白与彩色两种型号;3、长期都有库存。
与此同时,越来越多的CMOS感光芯片也被用于工业相机领域。
由于它们成本较低,可以有效降低机器视觉应用的整体造价。
但大多数CMOS相机的卷帘式快门限制了其应用领域。
美国TEO迪奥科技有限公司专业研发生产CCD和CMOS两种芯片的相机,以及机器视觉相关产品。
二、图象处理数字感光芯片还将一些物理及化学方面的属性(如温度、酸度等)转换为数字信号。
感光芯片不对这些属性进行任何分析处理,它们只是尽可能准确的将其转换为数字信号。
工业相机本质上是将光子信号转换为数字信号的设备,而这里所谓的数字信号就是图像。
这些图像不一定非得看起来如何美轮美奂,在工业机器视觉领域,只需要相机尽可能精确的将光信号转换为电信号。
所以,工业相机不会美化它拍摄的画面,同理,机器视觉领域也应尽量避免压缩图像。
三、镜头机器视觉技术的应用领域非常广泛。
因此,大部分工业相机在发售时都不带镜头,但带有镜头基座。
镜头接口有两种型号:C和CS。
此外,市场上还有显微镜、望远镜、内窥镜等其它基于这些装配接口标准的镜头。
四、数字 I/O接口机器视觉的定义不仅仅是捕捉到图像,还包括与机器的交互。
为此,工业相机提供了数字I/O接口。
其中用的最多的就是外触发输出。
在外触发模式下,相机根据外界事件触发快门,捕捉图像。
典型的应用就是传送带上安装光栅,然后将工业相机放置在旁边。
当有目标物体经过光栅时,触发脉冲信号,进而让相机曝光。
五、编程界面工业相机是数字化的图像感应设备。
其信号即图像最终还是要由计算机进行分析。
在进行图像分析前,首先需要设置相机参数和捕捉图像。
通常,机器视觉需要相机控制、图象采集和图象分析这三部分整合为一个程序。
工业相机的生产商一般也都会提供编程接口,用于相机控制和图象采集。

146现代电视技术2018.4动态范围指的是呈现所拍摄景物最暗部分到最亮部分的亮度范围,要完整地观看到原始景物的动态范围采集端、传输端、显示端的硬件水平需要保持一致。
当然再现真实景物动态范围难度很大,本文只讨论数字摄影机拍摄时影响动态范围的因素,可以说前端已经决定了最后所能呈现的动态范围的最大值。
动态范围 快门 光圈 增益 伽马摄影摄像的过程就是一个光信号采集转换成电信号记录的过程,与录音机记录声音是一个道理,同样存在数据采集、数据处理、数据记录的过程。
对胶片机等模拟拍摄来说,摄影的过程都是基于卤化银的光化学反应,它是按对数方式进行的,也就是说胶片颗粒对光线的反应和人眼感受器对光线的反应一样。
对摄像机等数字拍摄来说,摄影的过程是线性电路完成的,它是由许多的比特位来表现连续的模拟图像,如果不对线性电路做任何调整,那么数字影像能够展现的细节层次比起胶片将大大减少。
展现胶片的电影感,或者说能够更加接近人眼的感受曲线,有效扩大影像的动态范围(DR ),是广播电视行业使用非线性曲线的原因。
在数字电视领域,决定动态范围的环节有三个。
首先是图像传感器(CMOS/CCD )光电转换时的动态范围,可以理解为模拟视频信号的信噪比(SNR ),即可记录的不失真最大信号和视频噪波的有效值之比;其次是模数转换(A/D )时的动态范围,表现为数字采样的数据位,即采用8bit 、12bit 还是16bit 进行量化;最后是视频文件格式记录时的动态范围,可以通过记录比特数或改变增益、伽马等参数来实现不同的动态范围。
理论上若要达到更高的信噪比,则需要更多的量化比特数,即SNR 每增加6dB ,比特位需增加一位。
实际上三个环节均会对最终图像的动态范围产生影响,一般前两个环节由硬件决定,最后一个环节可由视频工程师修改参数来实现动态范围的调整。
数字摄像机的动态范围跟胶片时代的宽容度类似,目就必须要提到一个曝光值概念(EV ,Exposure Value ),指的是通过镜头直接抵达传感器的光通量,常使用曝光值来测量图像中包含的动态范围。
工业相机精度计算公式已知:目标长宽15 x 15mm,要求0.008mm 的精度幅宽按1.5倍,即1.5*15 = 22.5mm(1). 相机像素=幅宽/检测精度=22.5mm/0.008mm= 2812.5 pixel,相机分辨率为2812.5 x 2812.5 = 791万像素,考虑检测稳定性,按4个像素对应一个检测精度(边缘像素4,实际对长边和短边各放大2倍)。
实际相机分辨率为791x4 = 3164万像素常见像素:30万、130万、200万、300万、500万、900万、1200万、1400万、1600万、2000万、2500万、2900万、3100万、4700万、7100万等综上,3100万像素相机,这里考虑海康的MV-CH310-10GM 相机卷帘快门(Rolling Shutter)——拍摄静态物体多数CMOS图像传感器上使用的快门,其特征是逐行曝光,每一行的曝光时间不一致。
全局快门(Global Shutter)——拍摄运动物体CCD传感器和极少数CMOS传感器采用的快门,传感器上所有像素同时刻曝光。
(2)镜头焦距计算假设工作距离60mm系统放大倍率 = 芯片短边/视野短边 = 16.7/22.5 = 0.7422系统的分辨精度 = 像元尺寸/放大倍率 =3.45/0.7422 =4.648微米 < 8微米(客户需求),满足要求.镜头焦距为:f = 工作距离/(1+1/放大倍率) =60/(1+1/0.7422) = 25.56 毫米参考:勇哥的视觉实验:工业相机镜头焦距、工作距离、视野等选型的计算-视觉实验-少有人走的路 (skcircle) 文中提到的那个小程序,源代码里焦距计算公式不太一样,是用的第二种。
CCD工作原理CCD(Charge-Coupled Device)是一种用于光电转换的电子器件,主要应用于图像传感器和视频摄像头中。
它的工作原理是基于电荷耦合的方式,通过对光信号的转换和传输,实现图像的捕捉和处理。
CCD由一系列的光敏元件(photosite)组成,每个光敏元件可以捕捉到一个像素点的光信号。
当光线照射到CCD上时,光敏元件会将光信号转换为电荷,并将电荷暂时存储在每个元件中的电荷阱中。
在CCD图像传感器中,有两种常见的工作模式:全局快门(Global Shutter)和卷帘快门(Rolling Shutter)。
在全局快门模式下,所有的光敏元件同时曝光,可以捕捉到整个图像的同时。
而在卷帘快门模式下,每行或每列的光敏元件会按顺序曝光,因此在快速移动的情况下可能会出现图像扭曲的现象。
一旦光敏元件捕捉到了光信号并将其转换为电荷,这些电荷就会被传输到CCD芯片的输出端。
传输电荷的过程是通过在CCD芯片中引入的一系列电势阱和电势垒来实现的。
通过逐行或逐列地移动这些电势阱和电势垒,可以将电荷从光敏元件传输到输出端。
在CCD芯片的输出端,电荷会被转换为电压信号,并经过放大和数字化处理,最终形成一个完整的图像。
这个图像可以通过连接到计算机或其他显示设备的接口进行传输和显示。
CCD的工作原理可以总结为以下几个步骤:1. 光敏元件接收到光信号,并将其转换为电荷。
2. 电荷被暂时存储在每个光敏元件中的电荷阱中。
3. 电荷通过CCD芯片中的电势阱和电势垒传输到输出端。
4. 电荷在输出端被转换为电压信号,并进行放大和数字化处理。
5. 最终形成一个完整的图像,可以传输和显示。
CCD在图像传感器和视频摄像头中的广泛应用,使得它成为了现代数字图像和视频技术的重要组成部分。
其高质量的图像捕捉能力和较低的噪声水平,使得CCD在许多领域,如摄影、监控、医学影像等方面得到了广泛应用。
同时,随着技术的不断发展,CCD也在不断进化和改进,以满足更高的图像质量和性能需求。
卷帘曝光和全局曝光的差别
/u013698770/article/details/53040054
全局曝光和卷帘曝光是常见的相机曝光方式。
一般来说,CCD相机是全局曝光,而CMOS相机则存在卷帘曝光。
那么,这两种方式孰优孰劣呢?或者说,他们两者的差别在哪里呢?那么,先从两者的定义说起。
全局曝光
全局曝光的方式比较简单。
也就是说光圈打开后,整个图像芯片同时曝光。
因此,曝光时间与机械的开关速度有关。
既然与机械运动相关,所以,存在理论上的最小曝光时间。
卷帘曝光
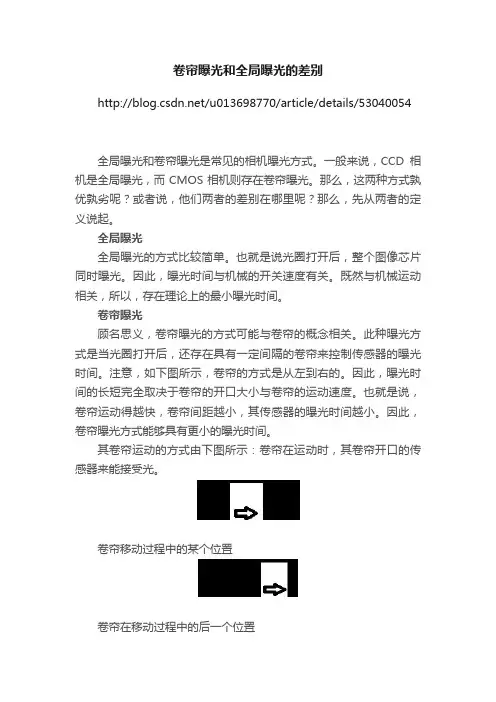
顾名思义,卷帘曝光的方式可能与卷帘的概念相关。
此种曝光方式是当光圈打开后,还存在具有一定间隔的卷帘来控制传感器的曝光时间。
注意,如下图所示,卷帘的方式是从左到右的。
因此,曝光时间的长短完全取决于卷帘的开口大小与卷帘的运动速度。
也就是说,卷帘运动得越快,卷帘间距越小,其传感器的曝光时间越小。
因此,卷帘曝光方式能够具有更小的曝光时间。
其卷帘运动的方式由下图所示:卷帘在运动时,其卷帘开口的传感器来能接受光。
卷帘移动过程中的某个位置
卷帘在移动过程中的后一个位置
两者的优缺点
(1)全局曝光的优点是所有的像素点同时曝光。
其缺点是曝光时间存在局限,存在机械极限的最小曝光时间。
(2)卷帘曝光的优点是具有更小的曝光时间。
其缺点是由于逐行的是在不同时间进行曝光取像,如果图像是运动的,则存在明显的拖影。
因此,卷帘曝光不适合拍摄运动的物体。
MT9V032总转风摄像头一、前言:总转风摄像头是一款基于MT9V032芯片设计的传感器模块,是逐飞科技独家研发的一款高性能,在恩智浦竞赛市面上性能最优,最适合高速情况下的图像采集的全局快门摄像头。
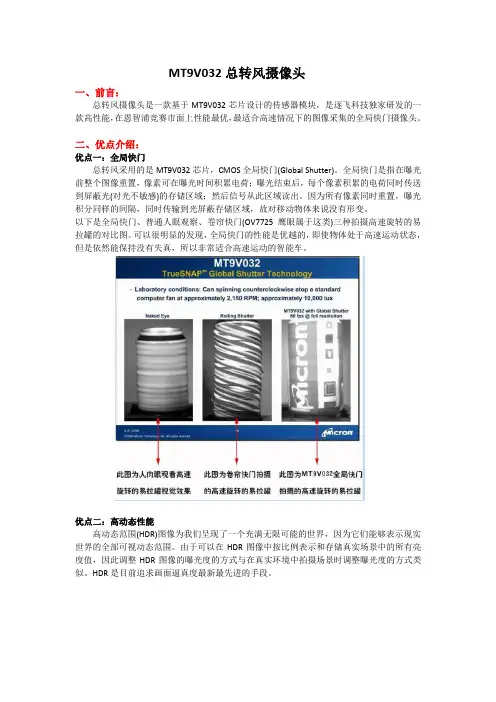
二、优点介绍:优点一:全局快门总转风采用的是MT9V032芯片,CMOS全局快门(Global Shutter)。
全局快门是指在曝光前整个图像重置,像素可在曝光时间积累电荷;曝光结束后,每个像素积累的电荷同时传送到屏蔽光(对光不敏感)的存储区域;然后信号从此区域读出。
因为所有像素同时重置,曝光积分同样的间隔,同时传输到光屏蔽存储区域,故对移动物体来说没有形变。
以下是全局快门、普通人眼观察、卷帘快门(OV7725鹰眼属于这类)三种拍摄高速旋转的易拉罐的对比图。
可以很明显的发现,全局快门的性能是优越的,即使物体处于高速运动状态,但是依然能保持没有失真,所以非常适合高速运动的智能车。
优点二:高动态性能高动态范围(HDR)图像为我们呈现了一个充满无限可能的世界,因为它们能够表示现实世界的全部可视动态范围。
由于可以在HDR图像中按比例表示和存储真实场景中的所有亮度值,因此调整HDR图像的曝光度的方式与在真实环境中拍摄场景时调整曝光度的方式类似。
HDR是目前追求画面逼真度最新最先进的手段。
优点三:FPS可调FPS(图像帧率)在软件中可以调节,总转风摄像头可以在50帧、60帧、75帧、100帧、150帧中切换,图像都可以保持稳定。
优点四:可以进行自动曝光(自动曝光开启时)总转风摄像头具有自动曝光功能,当环境变亮时,摄像头会自动减少曝光时间。
当环境变暗时,摄像头会自动增加曝光时间。
因此这款摄像头可以适应不同环境。
优点五:曝光时间随时可调(自动曝光关闭时)当摄像头采集到图像较亮(曝光过度)时,可以通过程序去调节曝光时间,使图像不那么亮,并且改变曝光时间不需要重新复位摄像头。
优点六:用户不需要自己写驱动程序由于总转风内部集成了驱动配置芯片,所以用户不需要自己写摄像头驱动程序,使用难度大大降低。
触发使用说明书文件版本:V1.2目录1 什么是触发 (3)2 如何产生一个触发信号 (3)2.1软件触发 (3)2 .2 硬件触发 (4)3 硬件触发(外触发) (5)3 .1 触发模式 (5)3 .2 快门模式 (6)3 .3 触发延时 (7)3 .4 消除触发信号抖动 (7)4 闪光灯同步模式 (8)4 .1 自动 (8)4 .2 半自动 (8)5 触发及GPIO原理与接线 (9)5 .1 原理示意图 (9)5 .2 接线参考图 (10)6 外触发线序定义 (11)6.1 四芯航空头线序定义(UB系列) (11)6.2 十二芯航空头线序定义(UB系列) (12)6.3 六芯航空头线序定义(UBS和SUB系列) (13)6.4 六芯航空头线序定义(GE系列) (14)1 什么是触发相机支持二种输出模式,即连续和触发模式,触发是一种被动模式,在触发模式下,相机进入准备状态,当触发信号产生后,相机立即开始曝光,然后输出图像,触发一般用在对实时性要求较高的场合,比如抓拍高速运动的物体。
2 如何产生一个触发信号在触发模式下,触发信号是启动相机曝光的唯一条件,触发信号可以由软件产生,也可以由外部硬件(机械开关/电子传感器)产生。
我们称这两种方法为软件触发和硬件触发。
2.1软件触发在SDK中,有专门的接口用于产生软件触发信号,还可以设置一次触发的帧数,下图是在Demo中使用触发的示例2 .2 硬件触发相机上有航空头连接器,用于连接外部开关和闪光灯,典型的外触发应用如下图所示:有关外触发和闪光灯的编程例子,请参考相机软件安装目录下DEMO/TriggerAndStrobe例程。
3 硬件触发(外触发)3 .1 触发模式●边沿触发模式。
可在界面上选择上边沿或者下边沿为触发条件。
当触发端子上,收到有效触发信号后,相机开始采集一帧图像,并传输到主机。
每个有效沿对应一次触发,只输出一帧图像。
在上一帧图像采集未结束前,重复的触发信号将被忽略。
第17卷 第8期2009年8月 光学精密工程 Optics and Precision Engineering Vol.17 No.8 Aug.2009 收稿日期:2008209224;修订日期:2009210224. 基金项目:吉林省教育厅科技计划项目;吉教科合字[2006第21号]文章编号 10042924X (2009)0822017207CMOS 图像传感器中卷帘式快门特性及其应用刘 智1,2,柴 华1,李娜娜1,3(1.长春理工大学,吉林长春130022;2.中国科学院长春光学精密机械与物理研究所,吉林长春130022;3.中国科学院光电研究院,北京100080)摘要:结合CMOS 图像传感器研究了CMOS 图像传感器卷帘式快门的具体应用。
介绍了卷帘式快门的特点和工作原理,分析了具有卷帘式快门的CMOS 图像传感器的成像特性,并对其进行了成像实验。
探讨了一种利用卷帘式快门相机拍摄的单精度视图来计算高速物体在三维空间中的位姿和速度的新方法。
最后,提出了一个运动目标的透视投影模型,讨论了估计目标位姿和速度的方法。
实验结果表明:具有卷帘式快门的CMOS 图像传感器对运动物体成像时会产生一定程度的畸变,畸变的程度与积分时间等传感器参数的设置有关。
在误差最小化的情况下得到了运动物体的位姿和速度参数,计算误差在2.5%以内,测量精度为0.01rad/s 。
对实验结果的分析证明了方法的可行性。
这种计算方法能够使得低价格、低耗能的CMOS 相机转化为一种新的速度传感器。
关 键 词:CMOS 图像传感器;卷帘式快门;全局快门;相机标定中图分类号:TP212.9 文献标识码:AShutter mode of CMOS im age sensor and its applicationL IU Zhi 1,2,C HA I Hua 1,L I Na 2na 1,3(1.Chan gchun Universit y of S cience and Technolog y ,Changchun 130022,Chi na;2.Chan gchun I nstit ute of O ptics ,Fi ne Mechanics and Physics ,Changchun 130022,Chi na;3.Photo 2Elect ronic Research I nstit ute ,Chi nese A ca dem y of S ciences ,B ei j i ng 100080,Chi na )Abstract :In order to research t he specific applications of a CMOS image sensor wit h a rolling shutter ,t his paper researches t he specific CMOS image sensor.Firstly ,t he p rinciple and characteristics of t he glo bal shutter and rolling shutter of t he CMOS imager are int roduced ,and t he impact of t he rolling shutter on measurement p recision of t he imaging system is analyzed.An imaging experiment is taken to analyze t he rolling shutter.Then ,a new met hod for comp uting instantaneously 3D poses and veloc 2ities of fast moving o bject s is p resented by using a single view.Finally ,a general perspective projec 2tion model of a moving 3D point is presented ,and a met hod to estimate t he pose and velocity is dis 2cussed.Experimental result s indicate t hat distortion appears when moving object s are imaged by t he CMOS imager ,and t he degree of distortion has close relations wit h some parameters of CMOS imager such as integration.Moreover ,t he po st and velocity parameters of a motion object can be obtained which shows in t he case of minimizing errors.The calculation error is under 2.5%and t he measure 2ment accuracy is0.01rad/s.After analysis,t he experimental result s have proved t hat not only t he ap2 proach is practicable but also it can t ransform a low co st and low power CMOS camera into a new ve2 locity sensor.K ey w ords:CMOS image sensor;rolling shutter;global shutter;camera calibration1 引 言 在机器人、自动监控、交通以及气象等技术领域,得到一张无失真、无虚点的图像是十分重要的。
图像传感器的光电参数及选择标准导语:图像传感器可将光信号转化为电信号,其光电参数直接决定了成像质量,是所有成像设备中的核心关键器件。
图像传感器分为CCD器件和CMOS器件。
CMOS图像传感器在帧频、集成度、可靠性、功耗和成本等方面优势明显。
随着CMOS技术的不断进步,CMOS图像传感器的成像性能已接近或超越CCD器件,在高端工业、医疗、和科研应用中逐步取代CCD,成为主流图像传感技术。
无论是CMOS或CCD图像传感器,其光电参数都可依据业界成熟的EMVA1288标准进行评价。
本文将详细阐述图像传感器光电参数的含义,以便为国内成像设备商提供器件选型的标准。
一、图像传感器的主要光电参数CMOS 和CCD图像传感器的性能指标可分为光学指标和电学指标,而其成像质量主要取决于以下光学指标:●分辨率及像元尺寸(Resolution and Pixel size)●快门类型(Shutter Type)●量子效率(Quantum Efficiency, QE)●灵敏度(Sensitivity)●暗噪声(Dark Noise)●满阱容量(Full Well Capacity, FWC)●动态范围(Dynamic Range, DR)●暗电流(Dark Current, DC)除上述光学指标外,图像传感器的电学指标,如帧频、功耗、输出格式及数据率也是设计成像系统时需要考虑的重要指标。
1)分辨率及像元尺寸图像传感器的感光区是由多个像元排列的一维或二维矩阵,其中像元(或像素)为单个感光单元。
图像传感器的分辨率通常由该矩阵的横纵方向的像元数表示,如1920 x 1080,或由其乘积表示,如2百万分辨率(2MP)。
像元尺寸为每个像元的物理尺寸,即相邻像元中心的间距。
像元尺寸越大,能收集到的光子数越多,芯片灵敏度越高,意味着在同样的光照条件下和曝光时间内,芯片能收集到的有效信号越多。
在光强可控的工业应用中,像元尺寸一般在4.5-6.5微米之间;而在微光应用中,像元尺寸多在10微米到24微米之间,以保证足够的灵敏度,提升图像信噪比;在X射线成像应用中,多采用10-16微米的像元,可有效降低所需射线剂量,减少对人体不必要的辐射。
图解:卷帘快门(Rolling shutter)与全局快门
(global shutter)的区别
Global shutter 曝光时间更短,但会增加RMS 读出噪声;
对于相机厂家,Rolling shutter可以达到更高的帧速,但当曝光不当或物体移动较快时,会出现部分曝光(partial exposure)、斜坡图形(skew)、晃动(wobble) 等现象。
曝光时间短的应用(如<500μs)适合Global shutter,曝光时间长(如大于500μs)时,选择rolling shutter可以有更低的噪声和帧速。
什么是global shutter?
所有像元同时曝光。
什么是rolling shutter?
不同行像元的曝光时间不同。
部分曝光现象(partial exposure)
斜坡现象(skew)
晃动现象(wobble)
晃动的机理与斜坡相同,只是更为复杂,往往与相机的不稳定有关。
研究报告范文怎么写(最新版)编制人:__________________审核人:__________________审批人:__________________编制单位:__________________编制时间:____年____月____日序言下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!并且,本店铺为大家提供各种类型的经典范文,如述职报告、工作总结、工作计划、合同协议、条据书信、演讲致辞、心得体会、作文大全、教学资料、其他范文等等,想了解不同范文格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor.I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!In addition, this shop provides you with various types of classic sample essays, such as work report, work summary, work plan, contract agreement, letter of agreement, speech, speech, experience, composition, teaching materials, other sample essays, etc. I want to know Please pay attention to the different format and writing methods of sample essays!研究报告范文怎么写在生活中,报告对我们来说并不陌生,不同的报告内容同样也不同的。
工业机器视觉技术MACHINE VISION◆机器视觉算法概述◆机器视觉系统概述◆机器视觉系统组成◆机器视觉技术应用领域目录CONTENTS什么是机器视觉?机器视觉就是用机器代替人眼来做测量和判断。
机器视觉系统是通过机器视觉的产品将被摄取目标转化为图像信号,传送给专有的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字信号;图像系统对这些信号进行运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。
⏹提高生产柔性和自动化程度⏹可用于人工作业的危险工作环境或人工视觉难以满足要求的场合,常用机器视觉来代替人工视觉⏹大批量工业生产过程中,用人工视觉检测产品质量效率低且精度不高,用机器视觉检测方法可以大大提高生产效率和生产的自动化程度⏹机器视觉易于实现信息的集成,是实现计算机集成制造的基础技术机器视觉能够带来哪些效益?◆节省时间◆降低生产成本◆优化物流过程◆缩短机器停工期◆提高生产率和产品质量◆减轻测试及检测人员劳动强度◆减少不合格产品的数量◆提高机器利用率机器视觉的应用范围有无检测残次品检测瑕疵检测…检测PCB 加工定位圆心定位标签位置定位…定位ID 识别光学字符识别/校验颜色识别…识别长度测量角度测量半径测量…测量测量:确定一个产品(零件、对象、目标)的长度、角度、半径…检测:确定一个产品(零件、对象、目标)偏离于所给定的一组标准的过程。
定位:确定一个产品(零件、对象、目标)关键安装位置的过程。
识别:判定一个产品(零件、对象、目标)属于所给定范围中的哪一种的过程。
机器视觉产品检验应用机器视觉系统概述为展现机器视觉的魅力,捕获清晰、优质的图像是机器视觉发挥作用的前提!1.怎样效果的图像才算优质的图像呢?2.如何才能捕获清晰、优质的图像呢?获得完美图像的关键要素⏹反差最大化。
控制因素:灯源⏹恰当的照明与曝光。
控制因素:灯源、镜头⏹高系统精度。
控制因素:视野、相机分辨率。
⏹清晰成象。
控制因素:镜头、灯源⏹避免畸变。
超全SLAM技术及应用介绍SLAM (simultaneous localization and mapping),也称为CML (Concurrent Mapping and Localization), 即时定位与地图构建,或并发建图与定位。
问题可以描述为:将一个机器人放入未知环境中的未知位置,是否有方法让机器人一边逐步描绘出此环境完全的地图,所谓完全的地图〔a consistent map〕是指不受障碍行进到房间可进入的每个角落。
SLAM最早由Smith、Self和Cheeseman于1988年提出。
由于其重要的理论与应用价值,被很多学者认为是实现真正全自主移动机器人的关键。
词语解释Simultaneous Localization and MappingSimultaneous Localization and Mapping, 同步定位与建图。
SLAM问题可以描述为: 机器人在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和地图进行自身定位,同时在自身定位的根底上建造增量式地图,实现机器人的自主定位和导航。
Scanning Laser Acoustic MicroscopeScanning Laser Acoustic Microscope, 激光扫描声学显微镜。
激光扫描声学显微镜是一种强有力的广泛应用于诸如工业用材料和生物医学领域的无损检测工具,其使用的频率范围为10MHz ~ 500MHz。
Lymphocyte Activation MoleculeLymphocyte Activation Molecule, 医学用语。
Supersonic Low Altitude MissileSLAM — Supersonic Low Altitude Missile〔超音速低空导弹〕的缩写,是美国的一项导弹研制方案。
Symmetrically Loaded Acoustic ModuleSLAM是Symmetrically Loaded Acoustic Module的英文缩写 [1] ,中文意思是平衡装载声学模块。
电子快门的方式——全局快门和卷帘式快门
常见的电子快门的方式有Global shutter(全局快门)和rolling shutter(卷帘式快门)两种,全局快门是通过整幅图片在同一时间曝光实现的。
传感器的所有像素点同时收集光线,同时曝光。
当预设的曝光时间到了,传感器停止收集光线,并将曝光图像转成电子图像。
在这个过程中,并没有实际意义上的快门存在。
在曝光开始的时候,传感器开始收集光线;在曝光结束的时候,光线收集电路被切断,传感器读出值即为一副图片。
卷帘式快门与全局快门不同,它是通过控制芯片逐行曝光的方式实现的。
卷帘式快门也没有实际意义上的快门,而是通过通断电控制传感器,使其不同部分在不同时间下对光的敏感度不同。
逐行进行曝光,直至所有像素点都被曝光。
当然,所有的动作在很短的时间内完成,一般情况为1/48至1/60秒。
需要注意的是,卷帘式快门采用的是逐行曝光的方式。
假如物体或摄像头在拍摄期间处于快速运动状态,拍摄结果就可能出现“倾斜”、“摇摆不定”或“部分曝光”等任一种情况。
卷帘式快门是逐行顺序曝光,所以不适合运动物体的拍摄。
当采用全局快门方式曝光时,所有像素在同一时刻曝光,类似于将运动物体冻结了,所以适合拍摄快速运动的物体。
但是全局快门可能出现像糊现象。
像糊现象出现与否取决于曝光时间的长短。
假如曝光时间过长,且物体运动过快则会出现像糊;假如曝光时间很短,类似于运动物体在瞬间被冻结了,则少有像糊。
两者对比如下图:。