平面2自由度并联机器人的动力学设计_刘善增
- 格式:pdf
- 大小:446.40 KB
- 文档页数:5
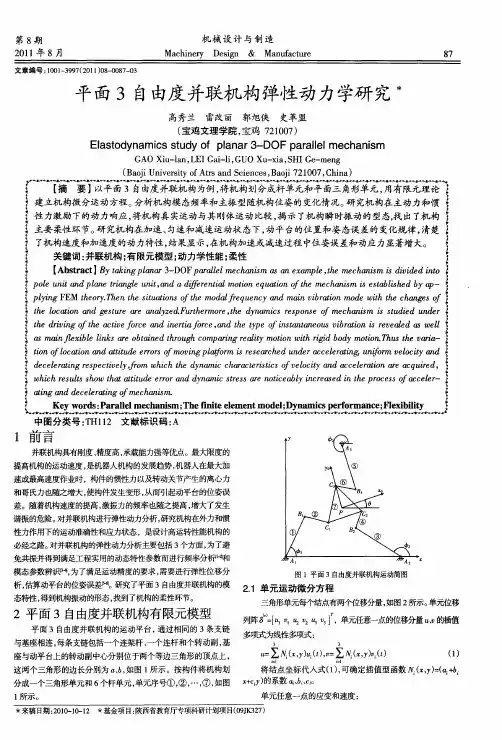
海上柔性并联平台空间动力学建模与分析谢克峰;张合;刘善增;李豪杰【摘要】针对某海上螺旋副-虎克铰-球铰(HUS)柔性并联平台由快速稳定和大负载引起的支撑连杆弹性变形和负载瞄准位置偏差问题,进行了空间弹性动力学建模.采用模态函数和空间等截面梁单元模型对弹性连杆进行空间建模,基于虎克铰和球铰连接的连杆为两自由度空间运动,推导了空间单元坐标与系统坐标的两自由度转换矩阵,利用平台的运动学和动力学约束条件建立了HUS柔性并联平台的空间弹性动力学方程;运用Newmark方法对弹性动力学方程进行离散求解,分析了平台的弹性动力学响应和支撑连杆的最大动应力,并进行了动力学测试实验;进一步分析了弹性变形对负载瞄准精度的影响.研究结果表明:由弹性变形引起的支撑点最大位移为2.45 mm,且x轴明显大于y轴和z轴;由弹性角位移引起最大位置偏差为1.35 m.实验结果与仿真结果一致,验证了数值建模的有效性.%The space elastic dynamic modelling of parallel platform is created for the elastic deformation and the load pointing displacement error of support link due to the rapid stabilization and large load of offshore HUS flexible parallel platform.Space elastic link is modelled by modal function and space equal section beam element model.The link based on hook joint and ball joint has two degrees of freedom space movement.The transformation matrix of two degrees of freedom between space element coordinate and system coordinate is derived.The kinematic and dynamic constraints of platform are used to establish the space elastic dynamic equations of HUS flexible parallel platform.The elastic dynamic equations are discretely solved by Newmark method.The elastic dynamic response of platform and the maximumdynamic stress of support link are analyzed.And the dynamic test experiment is conducted.The results show that the maximum displacement of support point by elastic deformation is 2.45 mm,and the error of axis xis significantly greater than those of axes y and z.Experimental results are consistent with the simulated results,thereby validating the effectiveness of the numerical model.The influence of elastic deformation on load pointing accuracy is analyzed,and the maximum position error due to elastic angular displacement is 1.35 m.【期刊名称】《兵工学报》【年(卷),期】2017(038)003【总页数】8页(P512-519)【关键词】机械学;柔性并联机构;空间动力学建模;弹性变形;弹性连杆【作者】谢克峰;张合;刘善增;李豪杰【作者单位】南京理工大学智能弹药技术国防重点学科实验室,江苏南京210094;南京理工大学智能弹药技术国防重点学科实验室,江苏南京210094;中国矿业大学机电工程学院,江苏徐州221116;南京理工大学智能弹药技术国防重点学科实验室,江苏南京210094【正文语种】中文【中图分类】TJ610.3+1;TP242.3海上平台从尺寸上可以分为大型平台和小型平台,常见的大型平台有石油钻井平台、风电设备平台等[1-2]。
二自由度机械臂的动力学模型通常涉及到两个主要的方面:几何构型和运动方程。
在建立动力学模型之前,首先需要确定机械臂的几何参数,包括每个关节的转动惯量以及各连杆的长度。
动力学模型可以分为两部分:静力学模型和动力学模型。
静力学模型关注的是力的平衡问题,即在机械臂的任意位置上,作用在机械臂上的所有外力之和等于零,所有外力矩之和也等于零。
动力学模型则进一步考虑了机械臂的运动情况,即在给定的力和力矩作用下,机械臂的运动如何变化。
为了建立动力学模型,我们通常采用牛顿-欧拉方法或者拉格朗日方法。
牛顿-欧拉方法从关节坐标出发,逐步推导出各关节的力和力矩,再结合连杆的长度,得到整个机械臂的动力学方程。
拉格朗日方法则是从能量的角度出发,利用动能和势能的关系来建立动力学方程。
具体来说,对于二自由度机械臂,其动力学方程可以表示为:
M(q)q'' + C(q, q', t)q' + G(q, t) = T(q, q', t)
其中:
- M(q) 是机械臂的质量矩阵,q是关节变量;
- q' 是关节变量的速度;
- q'' 是关节变量的加速度;
- C(q, q', t) 是由关节速度引起的科氏力和离心力等构成的矩阵;
- G(q, t) 是重力矩阵;
- T(q, q', t) 是外部施加的力和力矩。
在实际应用中,还需要对上述方程进行求解,这通常需要借助计算机模拟或数值积分方法。
通过求解动力学方程,可以预测机械臂在特定输入下的动态响应,这对于机械臂的控制系统的设计至关重要。
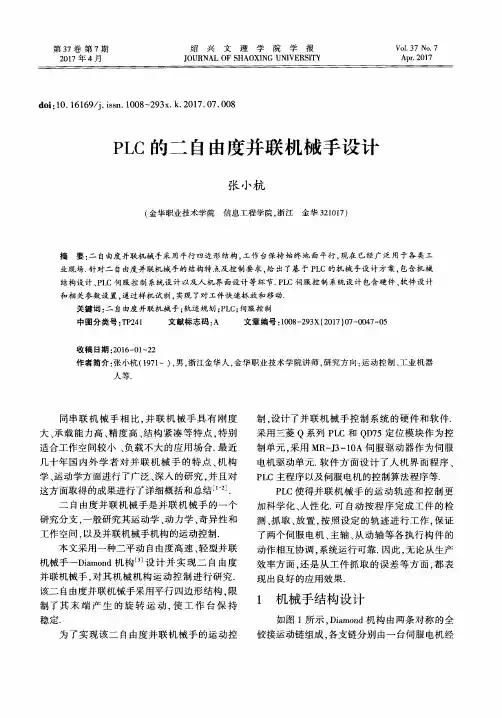
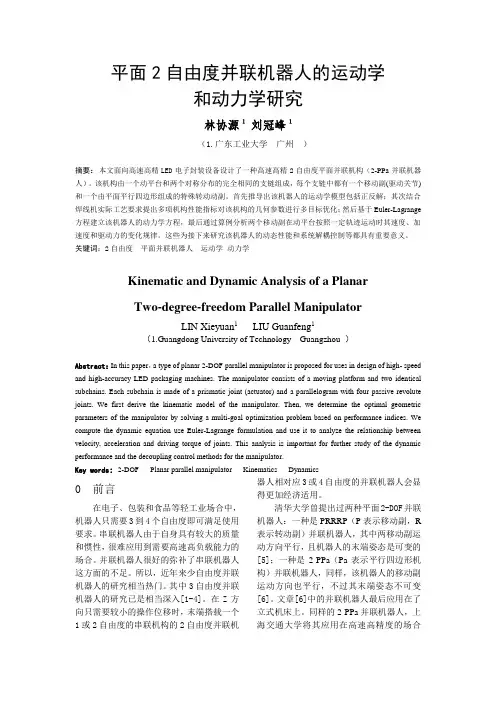
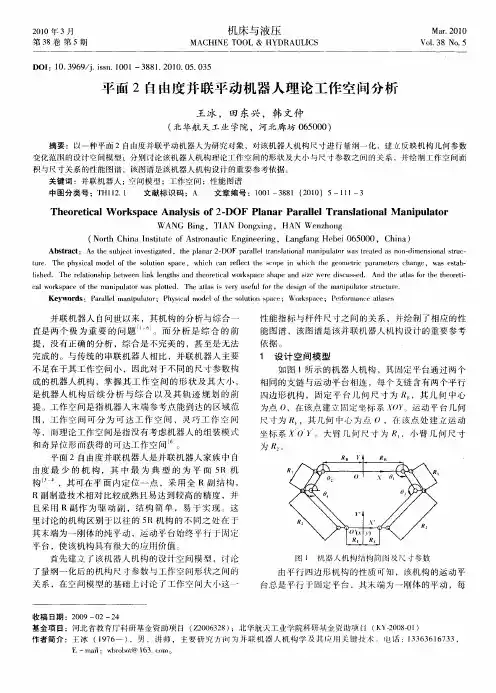
平面2自由度并联机器人的运动学和动力学研究林协源1刘冠峰1(1.广东工业大学广州)摘要:本文面向高速高精LED电子封装设备设计了一种高速高精2自由度平面并联机构(2-PPa并联机器人)。
该机构由一个动平台和两个对称分布的完全相同的支链组成,每个支链中都有一个移动副(驱动关节)和一个由平面平行四边形组成的特殊转动动副。
首先推导出该机器人的运动学模型包括正反解;其次结合焊线机实际工艺要求提出多项机构性能指标对该机构的几何参数进行多目标优化;然后基于Euler-Lagrange 方程建立该机器人的动力学方程,最后通过算例分析两个移动副在动平台按照一定轨迹运动时其速度、加速度和驱动力的变化规律。
这些为接下来研究该机器人的动态性能和系统解耦控制等都具有重要意义。
关键词:2自由度平面并联机器人运动学动力学Kinematic and Dynamic Analysis of a PlanarTwo-degree-freedom Parallel ManipulatorLIN Xieyuan1LIU Guanfeng1(1.Guangdong University of Technology Guangzhou )Abstract:In this paper,a type of planar 2-DOF parallel manipulator is proposed for uses in design of high- speed and high-accuracy LED packaging machines. The manipulator consists of a moving platform and two identical subchains. Each subchain is made of a prismatic joint (actuator) and a parallelogram with four passive revolute joints. We first derive the kinematic model of the manipulator. Then, we determine the optimal geometric parameters of the manipulator by solving a multi-goal optimization problem based on performance indices. We compute the dynamic equation use Euler-Lagrange formulation and use it to analyze the relationship between velocity, acceleration and driving torque of joints. This analysis is important for further study of the dynamic performance and the decoupling control methods for the manipulator.Key words:2-DOF Planar parallel manipulator Kinematics Dynamics0 前言在电子、包装和食品等轻工业场合中,机器人只需要3到4个自由度即可满足使用要求。
二自由度机械臂设计
设计二自由度机械臂是一项重要的工程任务,旨在实现机器人在特定工
作空间内灵活运动,并完成特定的操作任务。
该机械臂具有两个独立的自由度,允许其在平面内进行旋转和伸缩。
设计二自由度机械臂需要确定适合特定工作环境的结构和尺寸。
考虑到
工作空间的大小、作业要求和材料限制,选择合适的臂长和关节角度范围。
这可以通过详细分析所需工作任务的运动范围来实现。
选择合适的驱动系统和传感器是设计过程中的关键步骤。
根据工作任务
的性质,可以采用直流电机、步进电机或伺服电机作为驱动装置。
同时,安
装传感器来实时监测机械臂的位置和力量,并通过反馈机制来控制臂的运动。
设计控制系统是确保机械臂正常运行的关键因素。
通过集成控制器和计
算机编程,确保机械臂能够准确执行特定的运动轨迹并处理各种输入信号。
这要求开发适当的算法和编写有效的控制代码,以实现机械臂的精确控制。
设计时还需考虑机械臂的结构强度和稳定性。
使用合适的材料和结构设计,确保机械臂在工作过程中能够承受惯性力和外部冲击,并保持稳定的操
作状态。
机械臂的安全性也是设计过程中的重要考虑因素。
采取必要的安全措施,如限位开关和防护罩等,以确保机械臂在运行过程中不会损坏设备或造成人
身伤害。
设计二自由度机械臂需要综合考虑工作环境、运动需求、驱动系统、控
制系统、结构强度和安全性等因素。
通过合理的设计和完善的控制,机械臂
能够在工业生产、装配线和仓储等领域发挥重要作用,提高生产效率和安全性。
并联机器人的设计讲义并联机器人是一种由多个自由度机械臂通过并联机构连接并协同运动的机器人系统。
它通过将多个自由度机械臂的末端连接在同一平面上或在三维空间内,实现更高自由度的运动灵活性和操作精度。
本文将介绍并联机器人的设计讲义。
一、机器人整体结构设计1.机器人基座和支撑结构:机器人的基座是机器人的主要支撑结构,需要具备足够的稳定性和刚度。
基座采用高强度材料制造,并结合有限元分析进行优化设计;2.并联机构设计:并联机构是机器人的核心构件,用于连接多个自由度机械臂。
设计并联机构时需要考虑运动灵活性和刚度之间的平衡,以及机构的可制造性;3.自由度机械臂设计:自由度机械臂是并联机器人的执行器,用于完成各种操作任务。
机械臂的设计需要考虑负载能力、工作范围和操作精度等因素;4.控制系统设计:机器人的控制系统包括传感器、控制算法和驱动器等。
根据任务需求选择合适的传感器和控制算法,并设计相应的驱动系统。
二、运动学建模与分析1.机器人的运动学建模:通过建立机器人的联动关系和几何条件,得到机器人各个运动部件之间的运动学方程;2.运动学分析:利用运动学方程分析机器人的位置、速度和加速度等运动特性,包括正逆运动学分析和运动学仿真。
三、动力学建模与分析1.动力学建模:通过建立机器人的动力学方程,研究机器人在执行任务过程中的力矩、力和加速度等动力学特性;2.动力学分析:利用动力学方程分析机器人的受力、运动规律和运动过程中的惯性力等特性;四、控制系统设计1.模型驱动控制:根据机器人的动力学和运动学模型,设计相应的控制算法,实现对机器人的运动控制;2.传感器选择和数据采集:根据任务需求选择合适的传感器,如力传感器、位置传感器等,并设计数据采集系统;3.控制器设计:设计合适的控制器来实现对机器人的高精度控制,并选择合适的驱动器来驱动机器人的各个关节;4.控制算法优化:根据实际应用需求,对控制算法进行优化和改进,提高机器人的运动控制性能。
两自由度机械臂动力学模型的建模与控制
两自由度机械臂是指由两个旋转关节连接的机械臂,可以在二维平面内进行运动。
建立两自由度机械臂的动力学模型,可以用于控制器设计和路径规划。
1. 机械臂的动力学建模:
a. 首先,需要确定机械臂的连杆长度、质量以及旋转关节的惯性参数等。
这些参数可以通过实验或者手动测量获得。
b. 建立机械臂的正运动学方程,即通过旋转关节的角度计算连杆末端的位置和姿态。
c. 利用拉格朗日方程,可以得到机械臂的动力学方程。
动力学方程描述了系统的运动方程和力矩平衡关系。
2. 控制器设计:
a. 常用的控制方法有位置控制、速度控制和力控制等。
选择适合机械臂的控制方法,根据控制要求设计闭环控制系统。
b. 设计适当的控制算法,如PID控制器、模糊控制器或者神经网络控制器等,以实现期望的控制性能。
c. 在控制器设计过程中,需要对系统进行参数辨识和系统模型验证,以确保控制器的稳定性和鲁棒性。
3. 控制系统实现与调试:
a. 根据控制器的设计结果,实现完整的控制系统,包括硬件的搭建、传感器
的连接和信号处理等。
b. 进行控制系统的调试和参数调整,通过实验验证控制器的性能,并进一步优化控制算法和参数。
总结:建立两自由度机械臂的动力学模型是实现精确控制和路径规划的前提。
通过合适的控制器设计和系统实现,可以使机械臂实现所需的任务和运动轨迹。
并联机器人的构型1、转动副轴线切向分布的3-RPS并联机器人图所示为一种典型的3-RPS并联机器人,三个支链中的转动关节轴线共面分布,同时相切于三角形外接圆。
在初始位形时动平台能实现一维的移动,也可以绕动平台三个球钱中心所确定平面内的任意线矢量转动。
图1-并联机构简图2、立方体3-RPS并联机器人图所示的3-RPS并联机器人将三个支链的转动轴线两两正交布置。
其中Si为通过Si且平行于ai的线矢量。
由于Si是通过Si且满足si〃ai 的线矢量,其中i=l,2,3,显然si、s2和s3是空间异面线矢量。
对于这种支链布置方式,在初始位形时动平台只能绕pl、p2和p3三个独立的线矢量转动,因此它仍具有三维运动特征。
3、一类新型空间6自由度并联机器人机构图3图4(b)图5(b)设计过程如下:StePI选取能够实现动平台运动输出为2平移-1转动的平面三自由度并联机器人机构,选取结果如图3所示。
Step2根据并联机器人一般设计原则可知:驱动装置不应安置在动平台上,即图1中的3个转动副Ri(i=l,2,3)均不能直接作为主动副.因此,应对图1所示的平面三自由度并联机器人机构进行必要的改进,改进后的结果如图4所示.其中,图4(a)中的3个移动副Pi(i=l,2,3)均为主动副;图4(b)中的3个平面副Ei(i=l,2,3)均为主动副。
Step3选择适当的支路(或运动链)来连接动、静平台,确保该空间并联机器人机构可以实现各种需要空间运动(即升降、俯仰和偏转运动);并对设计出来的结果进行分析、判断和优选,得到了满足设计要求的2种新型空间并联机器人机构,其结构简图如图5所示。
4、CT导航并联机器人构型本机构由2个链连接了动静平台,而且2个支链可以组成一个闭链。
满足了并联机器人构件内在联系的定义。
驱动为四驱动并行输入。
从整体上看,该并联机构为单闭链并联机器人机构。
此机构的运动副分布在两平行平面内,而且输入驱动副为螺旋副。